[第1の実施の形態]
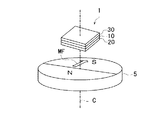
以下、本発明の実施の形態について図面を参照して詳細に説明する。始めに、図1および図2を参照して、本発明の第1の実施の形態に係る回転磁界センサの概略の構成について説明する。図1は、本実施の形態に係る回転磁界センサの概略の構成を示す斜視図である。図2は、本実施の形態における方向と角度の定義を示す説明図である。
図1に示したように、本実施の形態に係る回転磁界センサ1は、回転磁界MFを検出するものである。ここで、基準平面、基準位置および基準方向を、以下のように想定する。基準平面は、回転磁界センサ1と所定の位置関係を有する仮想の平面である。基準位置は、基準平面内に位置する。基準方向は、基準平面内に位置して、基準位置と交差する。基準位置における回転磁界MFの方向であって基準平面内に位置する方向は、回転磁界センサ1から見て、基準位置を中心として回転する。以下の説明において、基準位置における回転磁界MFの方向とは、基準平面内に位置する方向を指す。回転磁界センサ1は、基準位置における回転磁界MFの方向が基準方向に対してなす角度と対応関係を有する検出値を生成する。
図1には、回転磁界MFを発生する手段の例として、円柱形状の磁石5を示している。この磁石5は、円柱の中心軸を含む仮想の平面を中心として対称に配置されたN極とS極とを有している。この磁石5は、円柱の中心軸を中心として回転する。磁石5は、円柱の中心軸方向の両端に位置する2つの端面を有している。回転磁界センサ1は、磁石5の一方の端面に対向するように配置されている。本実施の形態では、基準平面は、例えば、磁石5の一方の端面に平行な平面である。また、基準位置は、例えば、回転磁界センサ1が回転磁界MFを検出する位置である。基準位置は、円柱の中心軸を含む回転中心Cと基準平面とが交差する位置であってもよい。この場合、磁石5が回転すると、基準位置における回転磁界MFの方向は、回転磁界センサ1から見て、基準位置を中心として回転する。
なお、回転磁界MFを発生する手段と回転磁界センサ1の構成は、図1に示した例に限られない。回転磁界MFを発生する手段と回転磁界センサ1は、基準位置における回転磁界MFの方向が回転磁界センサ1から見て回転するように、回転磁界MFを発生する手段と回転磁界センサ1の相対的位置関係が変化するものであればよい。例えば、図1に示したように配置された磁石5と回転磁界センサ1において、磁石5が固定されて回転磁界センサ1が回転してもよいし、磁石5と回転磁界センサ1が互いに反対方向に回転してもよいし、磁石5と回転磁界センサ1が同じ方向に互いに異なる角速度で回転してもよい。
また、磁石5の代わりに、1組以上のN極とS極が交互にリング状に配列された磁石を用い、この磁石の外周の近傍に回転磁界センサ1が配置されていてもよい。この場合には、磁石と回転磁界センサ1の少なくとも一方が回転すればよい。
また、磁石5の代わりに、複数組のN極とS極が交互に直線状に配列された磁気スケールを用い、この磁気スケールの外周の近傍に回転磁界センサ1が配置されていてもよい。この場合には、磁気スケールと回転磁界センサ1の少なくとも一方が、磁気スケールのN極とS極が並ぶ方向に直線的に移動すればよい。なお、この例については、後で第2の実施の形態として詳しく説明する。
上述の種々の回転磁界MFを発生する手段と回転磁界センサ1の構成においても、基準平面、基準位置および基準方向を想定可能である。
回転磁界センサ1は、第1の検出回路10、第2の検出回路20および第3の検出回路30を備えている。第1の検出回路10は、第1の磁気検出素子を含んでいる。第2の検出回路20は、第2の磁気検出素子を含んでいる。第3の検出回路30は、第3の磁気検出素子を含んでいる。図1では、理解を容易にするために、第1ないし第3の検出回路10,20,30を別体として描いているが、第1ないし第3の検出回路10,20,30は一体化されていてもよい。また、図1では、第1ないし第3の検出回路10,20,30が回転中心Cに平行な方向に積層されているが、その積層順序は図1に示した例に限られない。
第1の検出回路10は、基準位置における回転磁界MFの方向が基準方向に対してなす角度と対応関係を有する第1の信号を生成する。第2の検出回路20は、基準位置における回転磁界MFの方向が基準方向に対してなす角度と対応関係を有する第2の信号を生成する。第3の検出回路30は、基準位置における回転磁界MFの方向が基準方向に対してなす角度と対応関係を有する第3の信号を生成する。
なお、本実施の形態において、検出回路10,20,30の空間上の位置は、厳密には一致しない。同様に、検出回路10,20,30に含まれる第1ないし第3の磁気検出素子の空間上の位置も、厳密には一致しない。しかし、空間上において回転磁界MFの方向が同じになる領域の大きさに比べると、検出回路10,20,30の空間上の位置の差は十分に小さい。そのため、検出回路10,20,30のそれぞれの位置における回転磁界MFの方向は、実質的に同じである。従って、検出回路10,20,30内の任意の位置を基準位置とすることによって、検出回路10,20,30は、それぞれ、基準位置における回転磁界MFの方向が基準方向に対してなす角度と対応関係を有する第1の信号、第2の信号、第3の信号を生成することができる。
基準位置における回転磁界MFの方向が基準方向に対してなす角度と対応関係を有する第1ないし第3の信号は、検出した上記角度の値を示すものであってもよいし、上記角度に連動して変化する値を示すものであってもよい。後で詳しく説明するが、本実施の形態では、第1ないし第3の信号は、それぞれ、上記角度に連動して変化する値を示す信号であり、具体的には、基準位置における回転磁界MFの、所定の方向の成分の強度を示す信号である。
第1ないし第3の信号と同様に、基準位置における回転磁界MFの方向が基準方向に対してなす角度と対応関係を有する検出値についても、検出した上記角度の値を示すものであってもよいし、上記角度に連動して変化する値を示すものであってもよい。後で詳しく説明するが、本実施の形態では、上記検出値は、検出した上記角度の値を示すものである。
ここで、図2を参照して、本実施の形態における方向と角度の定義について説明する。まず、図1に示した回転中心Cに平行で、磁石5の一方の端面から回転磁界センサ1に向かう方向をZ方向と定義する。次に、Z方向に垂直な2つの方向であって、互いに直交する2つの方向をX方向とY方向と定義する。図2では、X方向を右側に向かう方向として表し、Y方向を上側に向かう方向として表している。また、X方向とは反対の方向を−X方向と定義し、Y方向とは反対の方向を−Y方向と定義する。
ここでは、基準位置PRは、回転磁界センサ1が回転磁界MFを検出する位置とする。また、基準方向DRはX方向とする。基準位置PRにおける回転磁界MFの方向DMが基準方向DRに対してなす角度を記号θで表す。回転磁界MFの方向DMは、図2において反時計回り方向に回転するものとする。角度θは、基準方向DRから反時計回り方向に見たときに正の値で表し、基準方向DRから時計回り方向に見たときに負の値で表す。
第1および第2の検出回路10,20は、基準位置PRにおける回転磁界MFの、第1の方向D1の成分を検出する。第3の検出回路30は、基準位置PRにおける回転磁界MFの、第2の方向D2の成分を検出する。本実施の形態は、第1の方向D1は、基準方向DR(X方向)から反時計回りに90°回転した方向であり、Y方向と一致している。第2の方向D2は、基準方向DRおよびX方向と一致している。
本実施の形態では、第1の信号と第2の信号における第1の磁気異方性に起因する変動の態様が互いに異なるように、第1および第2の磁気検出素子の少なくとも一方に第1の磁気異方性が設定されている。第1の信号と第2の信号における第1の磁気異方性に起因する変動とは、第1および第2の磁気検出素子の少なくとも一方に第1の磁気異方性が設定されていることによって、第1および第2の磁気検出素子に第1の磁気異方性が設定されていない場合と比較して、第1の信号と第2の信号に生じる変動を言う。
第1の磁気異方性は、第1および第2の磁気検出素子のうちの少なくとも第2の磁気検出素子に設定されていてもよい。本実施の形態では、特に、第1および第3の磁気検出素子には第1の磁気異方性が設定されずに、第2の磁気検出素子に第1の磁気異方性が設定されている。この場合、第1および第3の信号には、第1の磁気異方性に起因する変動は生じないが、第2の信号には、第1の磁気異方性に起因する変動が生じる。その結果、第1の信号と第2の信号における第1の磁気異方性に起因する変動の態様が互いに異なる。
また、本実施の形態では、第1の磁気異方性は、第2の磁気検出素子が含む磁性層の形状磁気異方性によって設定されている。図2において、符号11,21,31は、それぞれ、第1の磁気検出素子、第2の磁気検出素子、第3の磁気検出素子が含む磁性層の平面形状(上から見た形状)を表している。図2に示したように、本実施の形態では、例えば、第1および第3の磁気検出素子の磁性層の平面形状を円形とし、第2の磁気検出素子の磁性層の平面形状を楕円形とすることによって、第1および第3の磁気検出素子には設定されていない、形状異方性による第1の磁気異方性を、第2の磁気検出素子に設定している。
図2において、符号DA1を付した破線は、第2の磁気検出素子に設定された第1の磁気異方性による磁化容易軸方向、すなわち第2の磁気検出素子の磁性層の平面形状である楕円の長軸方向を表している。ここで、基準方向DRから反時計回り方向に見たときの、方向DA1が基準方向DRに対してなす角度を、記号βで表す。角度βは、0°以上、180°未満である。
第1ないし第3の磁気検出素子には、第1の磁気異方性とは異なる第2の磁気異方性が、例えば後天的に生じる。第2の磁気異方性は、例えば誘導磁気異方性によるものである。この第2の磁気異方性は、例えば、第1ないし第3の磁気検出素子に特定の方向の外部磁界が印加されたままで、第1ないし第3の磁気検出素子の温度が高温から下降した場合に生じる。図2において、符号DA2を付した破線は、第2の磁気異方性による磁化容易軸方向を表している。ここで、基準方向DRから反時計回り方向に見たときの、方向DA2が基準方向DRに対してなす角度を、記号αで表す。角度αは、0°以上、180°未満である。
次に、図3を参照して、回転磁界センサ1の構成について詳しく説明する。図3は、回転磁界センサ1の構成を示す回路図である。第1の検出回路10は、角度θと対応関係を有する第1の信号S1を生成する。第2の検出回路20は、角度θと対応関係を有する第2の信号S2を生成する。第3の検出回路30は、角度θと対応関係を有する第3の信号S3を生成する。第1および第2の信号S1,S2は、基準位置PRにおける回転磁界MFの、第1の方向D1の成分の強度に対応した信号である。第3の信号S3は、基準位置PRにおける回転磁界MFの、第2の方向D2の成分の強度に対応した信号である。
第1ないし第3の信号S1〜S3は、互いに等しい信号周期Tで周期的に変化する。第1および第3の磁気検出素子に第2の磁気異方性が生じていない状態では、第1および第3の信号S1,S3の波形は、理想的には、正弦曲線(サイン(Sine)波形とコサイン(Cosine)波形を含む)となる。第1および第3の磁気検出素子に第2の磁気異方性が生じると、第1および第3の信号S1,S3の波形は、正弦曲線から歪む。
第2の信号S2の波形は、少なくとも第1の磁気異方性に起因して、正弦曲線から歪む。第2の磁気検出素子に第2の磁気異方性が生じると、第2の信号S2の波形は、第1および第2の磁気異方性に起因して、正弦曲線から歪む。
第3の信号S3の位相は、第1の信号S1の位相と異なっている。本実施の形態では、第3の信号S3の位相は、第1の信号S1の位相に対して、信号周期Tの1/4の奇数倍だけ異なっていることが好ましい。ただし、磁気検出素子の作製の精度等の観点から、第1の信号S1と第3の信号S3の位相差は、信号周期Tの1/4の奇数倍から、わずかにずれていてもよい。以下の説明では、第1の信号S1の位相と第3の信号S3の位相の関係が上記の好ましい関係になっているものとする。
第1の検出回路10は、第1の信号S1を出力する出力端を有している。第2の検出回路20は、第2の信号S2を出力する出力端を有している。第3の検出回路30は、第3の信号S3を出力する出力端を有している。図3に示したように、回転磁界センサ1は、更に、第1の演算回路61と、第2の演算回路62とを備えている。第1および第2の演算回路61,62は、それぞれ、2つの入力端と1つの出力端とを有している。第1の演算回路61の2つの入力端は、それぞれ、第1および第2の検出回路10,20の各出力端に接続されている。第2の演算回路62の2つの入力端は、それぞれ、第3の検出回路30と第1の演算回路61の各出力端に接続されている。
第2の演算回路62は、角度θと対応関係を有する検出値θsを算出する。本実施の形態では、検出値θsは、回転磁界センサ1によって検出された角度θの値である。第1および第2の演算回路61,62は、例えば、1つのマイクロコンピュータによって実現することができる。第1および第2の演算回路61,62の作用と、検出値θsの算出方法については、後で詳しく説明する。
第1の検出回路10は、ホイートストンブリッジ回路14と、差分検出器15とを有している。ホイートストンブリッジ回路14は、電源ポートV1と、グランドポートG1と、2つの出力ポートE11,E12と、直列に接続された第1の対の磁気検出素子R11,R12と、直列に接続された第2の対の磁気検出素子R13,R14とを含んでいる。磁気検出素子R11,R13の各一端は、電源ポートV1に接続されている。磁気検出素子R11の他端は、磁気検出素子R12の一端と出力ポートE11に接続されている。磁気検出素子R13の他端は、磁気検出素子R14の一端と出力ポートE12に接続されている。磁気検出素子R12,R14の各他端は、グランドポートG1に接続されている。電源ポートV1には、所定の大きさの電源電圧が印加される。グランドポートG1はグランドに接続される。差分検出器15は、出力ポートE11,E12の電位差に対応する信号である第1の信号S1を第1の演算回路61に出力する。
第2の検出回路20の回路構成は、第1の検出回路10と同様である。すなわち、第2の検出回路20は、ホイートストンブリッジ回路24と、差分検出器25とを有している。ホイートストンブリッジ回路24は、電源ポートV2と、グランドポートG2と、2つの出力ポートE21,E22と、直列に接続された第1の対の磁気検出素子R21,R22と、直列に接続された第2の対の磁気検出素子R23,R24とを含んでいる。磁気検出素子R21,R23の各一端は、電源ポートV2に接続されている。磁気検出素子R21の他端は、磁気検出素子R22の一端と出力ポートE21に接続されている。磁気検出素子R23の他端は、磁気検出素子R24の一端と出力ポートE22に接続されている。磁気検出素子R22,R24の各他端は、グランドポートG2に接続されている。電源ポートV2には、所定の大きさの電源電圧が印加される。グランドポートG2はグランドに接続される。差分検出器25は、出力ポートE21,E22の電位差に対応する信号である第2の信号S2を第1の演算回路61に出力する。
第3の検出回路30の回路構成は、第1の検出回路10と同様である。すなわち、第3の検出回路30は、ホイートストンブリッジ回路34と、差分検出器35とを有している。ホイートストンブリッジ回路34は、電源ポートV3と、グランドポートG3と、2つの出力ポートE31,E32と、直列に接続された第1の対の磁気検出素子R31,R32と、直列に接続された第2の対の磁気検出素子R33,R34とを含んでいる。磁気検出素子R31,R33の各一端は、電源ポートV3に接続されている。磁気検出素子R31の他端は、磁気検出素子R32の一端と出力ポートE31に接続されている。磁気検出素子R33の他端は、磁気検出素子R34の一端と出力ポートE32に接続されている。磁気検出素子R32,R34の各他端は、グランドポートG3に接続されている。電源ポートV3には、所定の大きさの電源電圧が印加される。グランドポートG3はグランドに接続される。差分検出器35は、出力ポートE31,E32の電位差に対応する信号である第3の信号S3を第2の演算回路62に出力する。
本実施の形態では、ホイートストンブリッジ回路(以下、ブリッジ回路と記す。)14,24,34に含まれる全ての磁気検出素子として、磁気抵抗効果型磁気検出素子であるMR素子、特にスピンバルブ型のMR素子を用いている。スピンバルブ型のMR素子は、TMR素子でもよいし、GMR素子でもよい。TMR素子またはGMR素子は、磁化方向が固定された磁化固定層と、回転磁界MFの方向DMに応じて磁化の方向が変化する磁性層である自由層と、磁化固定層と自由層の間に配置された非磁性層とを有している。TMR素子では、非磁性層はトンネルバリア層である。GMR素子では、非磁性層は非磁性導電層である。TMR素子またはGMR素子では、自由層の磁化の方向が磁化固定層の磁化の方向に対してなす角度に応じて抵抗値が変化し、この角度が0°のときに抵抗値は最小値となり、角度が180°のときに抵抗値は最大値となる。以下の説明では、ブリッジ回路14,24,34に含まれる磁気検出素子をMR素子と記す。また、第1ないし第3の磁気検出素子を、第1ないし第3のMR素子と記す。図3において、塗りつぶした矢印は、MR素子における磁化固定層の磁化の方向を表し、白抜きの矢印は、MR素子における自由層の磁化の方向を表している。
第1の検出回路10では、MR素子R11,R14における磁化固定層の磁化の方向は、第1の方向D1(Y方向)に平行な方向であり、MR素子R12,R13における磁化固定層の磁化の方向は、MR素子R11,R14における磁化固定層の磁化の方向とは反対の方向である。図2において、符号DP1を付した矢印は、MR素子R11,R14における磁化固定層の磁化の方向を表している。この場合、回転磁界MFの第1の方向D1(Y方向)の成分の強度に応じて、出力ポートE11,E12の電位差が変化する。従って、第1の検出回路10は、回転磁界MFの第1の方向D1の成分の強度を検出して、その強度を表す第1の信号S1を出力する。
第2の検出回路20では、MR素子R21,R24における磁化固定層の磁化の方向は、第1の方向D1(Y方向)に平行な方向であり、MR素子R22,R23における磁化固定層の磁化の方向は、MR素子R21,R24における磁化固定層の磁化の方向とは反対の方向である。図2において、符号DP2を付した矢印は、MR素子R21,R24における磁化固定層の磁化の方向を表している。この場合、回転磁界MFの第1の方向D1(Y方向)の成分の強度に応じて、出力ポートE21,E22の電位差が変化する。従って、第2の検出回路20は、回転磁界MFの第1の方向D1の成分の強度を検出して、その強度を表す第2の信号S2を出力する。
第3の検出回路30では、MR素子R31,R34における磁化固定層の磁化の方向は、第2の方向D2(X方向)に平行な方向であり、MR素子R32,R33における磁化固定層の磁化の方向は、MR素子R31,R34における磁化固定層の磁化の方向とは反対の方向である。図2において、符号DP3を付した矢印は、MR素子R31,R34における磁化固定層の磁化の方向を表している。この場合、回転磁界MFの第2の方向D2(X方向)の成分の強度に応じて、出力ポートE31,E32の電位差が変化する。従って、第3の検出回路30は、回転磁界MFの第2の方向D2の成分の強度を検出して、その強度を表す第3の信号S3を出力する。
なお、検出回路10,20,30内の複数のMR素子における磁化固定層の磁化の方向は、MR素子の作製の精度等の観点から、上述の方向からわずかにずれていてもよい。
次に、図2、図5および図6を参照して、MR素子の構成の一例と、第1の磁気異方性について説明する。図5は、第1および第3のMR素子の一部を示す斜視図である。この例では、第1および第3のMR素子は、複数の下部電極と、複数のMR膜と、複数の上部電極とを有している。複数の下部電極42は図示しない基板上に配置されている。個々の下部電極42は細長い形状を有している。下部電極42の長手方向に隣接する2つの下部電極42の間には、間隙が形成されている。図5に示したように、下部電極42の上面上において、長手方向の両端の近傍に、それぞれMR膜50が配置されている。
MR膜50は、下部電極42側から順に積層された自由層51、非磁性層52、磁化固定層53および反強磁性層54を含んでいる。図5に示した例では、MR膜50は、円柱形状を有している。この場合、自由層51の平面形状は円形になる。自由層51は、下部電極42に電気的に接続されている。反強磁性層54は、反強磁性材料よりなり、磁化固定層53との間で交換結合を生じさせて、磁化固定層53の磁化の方向を固定する。複数の上部電極43は、複数のMR膜50の上に配置されている。個々の上部電極43は細長い形状を有し、下部電極42の長手方向に隣接する2つの下部電極42上に配置されて隣接する2つのMR膜50の反強磁性層54同士を電気的に接続する。このような構成により、図5に示したMR素子は、複数の下部電極42と複数の上部電極43とによって直列に接続された複数のMR膜50を有している。なお、MR膜50における層51〜54の配置は、図5に示した配置とは上下が反対でもよい。
図6は、第2のMR素子の一部を示す斜視図である。第2のMR素子の構成は、基本的には、第1および第3のMR素子の構成と同じである。ただし、第2のMR素子では、MR膜50の形状が、第1および第3のMR素子におけるMR膜50の形状とは異なっている。図6に示した例では、MR膜50は、楕円柱形状を有している。この場合、自由層51の平面形状は楕円形になる。
このように、本実施の形態では、第1および第3のMR素子の自由層51の平面形状を円形とし、第2のMR素子の自由層51の平面形状を楕円形とすることによって、第1および第3のMR素子には設定されていない、形状異方性による第1の磁気異方性を、第2のMR素子に設定している。
第2のMR素子において、自由層51の平面形状である楕円の長軸方向が、自由層51の磁化容易軸方向となる。この自由層51の磁化容易軸方向は、図2に示した第1の磁気異方性による磁化容易軸方向DA1と一致する。第2のMR素子において、自由層51の磁化容易軸方向は、磁化固定層53の磁化方向(第1の方向D1)に対して平行ではなく且つ直交していないことが好ましい。
なお、MR膜50の形状は、図5および図6に示した例に限られない。例えば、第1および第3のMR素子におけるMR膜50は、上面が正方形の角柱形状を有していてもよいし、第2のMR素子におけるMR膜50は、上面が長方形の角柱形状を有していてもよい。
次に、第1および第3の信号S1,S3の波形について説明する。図3に示した例では、第1および第3のMR素子に第2の磁気異方性が生じていない状態では、理想的には、第3のMR素子の磁化固定層の磁化方向は、第1のMR素子の磁化固定層の磁化方向に直交している。この場合、理想的には、第1の信号S1の波形は、角度θに依存したサイン(Sine)波形になり、第3の信号S3の波形は、角度θに依存したコサイン(Cosine)波形になる。この場合、第3の信号S3の位相は、第1の信号S1の位相に対して、信号周期Tの1/4すなわちπ/2(90°)だけ異なっている。
角度θが0°よりも大きく180°よりも小さいときは、第1の信号S1は正の値であり、角度θが180°よりも大きく360°よりも小さいときは、第1の信号S1は負の値である。また、角度θが0°以上90°未満のとき、および270°より大きく360°以下のときは、第3の信号S3は正の値であり、角度θが90°よりも大きく270°よりも小さいときは、第3の信号S3は負の値である。
上述のように、本実施の形態では、第1および第3のMR素子に第2の磁気異方性が生じていない状態では、第1および第3の信号S1,S3の波形は、理想的には正弦曲線となる。しかし、第1および第3のMR素子に後天的に第2の磁気異方性が生じると、第1および第3の信号S1,S3の波形は、正弦曲線から歪む。第1および第3のMR素子に生じる第2の磁気異方性は、MR素子の自由層51に生じる誘導磁気異方性によるものである。この自由層51の誘導磁気異方性は、例えば、MR素子に特定の方向の外部磁界が印加されたままで、MR素子の温度が高温から下降した場合に生じる。
第2の磁気異方性によって波形が歪んだ第1および第3の信号S1,S3は、近似的に、第2の磁気異方性に基づく角度変動項を含む変数を用いた三角関数で表すことができる。具体的には、第1および第3の信号S1,S3は、近似的に、下記の式(1)、(2)で表すことができる。
S1=sin[θ−Asin{2(θ−α)}] …(1)
S3=cos[θ−Asin{2(θ−α)}] …(2)
上記の式(1)、(2)において、Asin{2(θ−α)}は、第2の磁気異方性に基づく角度変動項である。この角度変動項において、Aは振幅(角度変動の最大値)を表し、αはθに対する位相差を表している。なお、この角度変動項におけるαは、図2に示したαと同じものである。この角度変動項の周期は、信号周期Tの1/2、すなわちπ(180°)となる。
次に、第2の信号S2の波形について説明する。図3に示した例では、第2のMR素子の磁化固定層の磁化方向は、第1のMR素子の磁化固定層の磁化方向と一致している。この場合、第2の信号S2の波形は、第1の信号S1の波形と類似したものとなる。ただし、第2のMR素子には、第1のMR素子には設定されていない第1の磁気異方性が設定されていることから、この第1の磁気異方性に起因して、第2の信号S2の波形は、第1の信号S1の波形とは若干異なったものとなる。このようにして、第1の信号S1と第2の信号S2における第1の磁気異方性に起因する変動の態様が互いに異なる。
第2のMR素子に後天的に第2の磁気異方性が生じると、第2の信号S2の波形は、第1および第2の磁気異方性に起因して、正弦曲線から歪む。第1および第2の磁気異方性に起因して歪んだ第2の信号S2は、近似的に、第1の磁気異方性に基づく角度変動項と第2の磁気異方性に基づく角度変動項とを含む変数を用いた三角関数で表すことができる。具体的には、第2の信号S2は、近似的に、下記の式(3)で表すことができる。
S2=sin[θ−Asin{2(θ−α)}−Bsin{2(θ−β)}]…(3)
上記の式(3)において、Bsin{2(θ−β)}は、第1の磁気異方性に基づく角度変動項である。この角度変動項において、Bは振幅(角度変動の最大値)を表し、βはθに対する位相差を表している。なお、この角度変動項におけるβは、図2に示したβと同じものである。この角度変動項の周期は、信号周期Tの1/2、すなわちπ(180°)となる。第1の磁気異方性は任意に設定することができることから、Bおよびβの値も任意に設定することができる。
図8は、第1の信号S1の波形と第2の信号S2の波形の一例を示している。図8において、横軸は角度θを示し、縦軸は第1および第2の信号S1,S2の大きさ(電圧)を示している。符号71で示す波形は第1の信号S1の波形を示し、符号72で示す波形は、第2の信号S2の波形を示している。なお、図8に示した各波形は、式(1)、(3)を用いてシミュレーションによって作成したものである。このシミュレーションでは、式(1)、(3)におけるAを5°とし、式(1)、(3)におけるαを0°とし、式(3)におけるBを10°とし、式(3)におけるβを45°とした。図8に示したように、第2の信号S2の波形は、第1の信号S1の波形とは若干異なったものとなる。
次に、第1の演算回路61について説明する。第1の演算回路61は、第2の磁気異方性に起因して検出値θsに生じる誤差を補正するための補正情報を求める。図4は、第1の演算回路61の構成の一例を示すブロック図である。この例では、第1の演算回路61は、信号対推移取得部61A、理論信号値記憶部61Bおよび比較判定部61Cを有している。第1の信号S1と第2の信号S2は、信号対推移取得部61Aに入力される。信号対推移取得部61Aは、同時刻に得られる第1の信号S1と第2の信号S2の対を信号対としたとき、回転磁界MFの方向DMが所定範囲で回転する過程で得られる信号対の推移を取得する。ここで、信号対推移取得部61Aは、第1の信号S1および第2の信号S2を入力し、第1の信号S1および第2の信号S2のうちの一方の信号を引数として対応付けられた他方の信号array1を出力する。所定範囲は、360°でもよいし、後で説明する信号対の推移の態様から補正情報を求めることが可能であれば360°未満の範囲でもよい。あるいは、360°未満の異なる複数の範囲でもよいし、異なる複数の角度でもよい。以下の説明では、所定範囲を360°とする。
信号対推移取得部61Aの出力array1は、第1の信号S1と第2の信号S2の信号対からなるリサージュ曲線の1部分を1次元配列に変換したものに相当する。図10は信号対推移取得部61Aが出力する信号array1の簡単な例で、等間隔に増加していく第1の信号S1に対応する第2の信号S2を取得し、第1の信号S1を引数として第2の信号S2を出力するものとなっている。第1の信号S1と第2の信号S2の信号対からなるリサージュ曲線において、ある一方の信号値と対応する他方の信号値は2個存在するため、第1の信号S1を引数とした第2の信号S2をふたつの1次元配列に変換して取り扱ってもよい。なお、リサージュの形状の対称性が良好であればふたつの1次元配列のうち片側だけ取り扱ってもよい。ところで、単位時間当たりに信号を入手する場合は、磁石の回転数および信号入手開始時間に応じて入手できる信号は常に異なる信号となっているので、所望の信号をそのまま入手することはできない。従って、第1の信号S1および第2の信号S2を取得し補正情報の算出を行うに当たり、入手した信号から例えば、直線補間処理を行うことにより、一旦、所望の電圧値に変換して引数を求める信号補正を行い所望の信号を入手する必要が生じる。一方、等間隔に増加する信号を引数とする場合、時間に依存しない信号の取り扱いが可能となっている。よって、一旦、所望の電圧値に変換して引数を求める信号補正が不要となることから、再現性の高い補正情報の算出を行うことが可能となっている。また、信号処理に伴うメモリーの増加を招くことも回避可能である。また、ふたつの1次元配列に変換して取り扱う場合、それぞれの一次元配列は、回転磁界の回転に対応するように、例えば、回転磁界の磁化固定層の固定された磁化方向に対して0〜180度と180度〜360度とにそれぞれ対応するように扱うことが好ましい。ここで、基準方向を磁化固定層の固定された磁化方向に設定すれば、回転磁界の基準方向とのなす角度が0度において第1の信号S1および第2の信号S2は最小値となり、180度において最大値となる。従って、基準方向にからの回転角に対応するふたつの1次元配列として扱うことが可能となる。
図9の(a)、(b)、(c)は、信号対の推移の態様の3つの例を示している。図9の(a)、(b)、(c)において、横軸は第1の信号S1の大きさ(電圧)を示し、縦軸は第2の信号S2の大きさ(電圧)を示している。図9の(a)、(b)、(c)に示した3つのリサージュ曲線は、式(1)、(3)を用いてシミュレーションによって作成したものである。このシミュレーションでは、式(1)、(3)におけるαを0°とし、式(3)におけるBを10°とし、式(3)におけるβを45°とした。図9の(a)、(b)、(c)は、それぞれ、式(1)、(3)におけるAが5°、10°、15°の場合におけるリサージュ曲線を示している。
図9に示したように、信号対の推移の態様(リサージュ曲線の形状)は、第2の磁気異方性の態様によって変化する。従って、信号対の推移の態様(リサージュ曲線の形状)から、第2の磁気異方性に関する情報を得ることが可能である。この情報は、第2の磁気異方性に起因して検出値θsに生じる誤差を補正するための補正情報となる。より詳しく説明すると、第2の磁気異方性の態様は、式(1)、(3)におけるAとαの値の組み合わせによって決まる。以下、Aとαの値の組み合わせを(A,α)と表現する。本実施の形態では、信号対の推移の態様(リサージュ曲線の形状)から、(A,α)を特定することが可能であり、この(A,α)が補正情報となる。
なお、ここでは第1の信号S1と第2の信号S2との最大値と最小値が等しくなるようにそれぞれの磁気抵抗素子が設計されている。また、第1の信号S1と第2の信号S2を出力するそれぞれの磁気抵抗素子には飽和磁界が印加されており、同一の飽和磁界の方向に対してブリッジ回路を形成するそれぞれの磁気抵抗素子の磁化固定層の固定された方向が同じ方向となるように設計されている。このように磁気抵抗素子が設計されているので、同一の飽和磁界に対するそれぞれの磁化固定層の固定された方向を基準方向とする基準平面内の角度は同等とみなすことが可能となる。また、第1の信号S1と第2の信号S2との最大値と最小値が等しくなるよう設計されているので、信号の取り扱いが容易となっている。
図4に示す理論信号値記憶部61Bは、第2の磁気異方性に起因する誤差を補正するための補正情報の理論値(A,α)がいろいろな値を取り得ることを想定し、各理論値(A,α)の組み合わせ毎の第1の信号と第2の信号のうちの一方の信号を引数として対応付けられた他方の理論信号値array2を記憶しており、比較判定部61Cに対してarray2を出力する。
比較判定部61Cは各理論値(A,α)に対応する各理論信号値array2のうち、最もarray1によく一致するものを一つ検索する。この処理により最適な(A,α)が求まり、比較判定部61Cは補正情報、すなわち(A、α)を出力する。ここで、array1によく一致するarray2を検索するさいには残差平方和が最も小さくなるarray2を検索する手法などを使用する。 すなわち、第1の信号S1と第2の信号S2のうち同一である一方の信号における他方の信号と理論値毎の他方の理論信号値との差分の平方値を所定の範囲内の一方の信号において加算した値を理論値毎に比較することにより、補正情報を出力する。また、array2はあらかじめ理論値(A,α)を記憶しておくのではなく、その場で数式(1)、(3)を用いて生成することでも同様の機能を実現できる。以下に説明する。
図5に示す実施形態では、理論信号値生成部61Dが各理論値(A,α)に対応する各理論信号値array2を近似式より生成し理論信号値記憶部61Bに出力する。各理論値(A,α)のバリエーションは、あらかじめ(A,α)の組み合わせを記述して用意されたマトリクスに従い順番にarray2を理論信号値記憶部61Bに出力してもよい。または乱数などを用いて各理論値(A,α)を生成し、それに対応するarray2を理論信号値記憶部61Bに順番に出力しても良い。図5に示す実施形態では、理論信号値記憶部61Bは各理論値(A,α)に対応する各理論信号値array2のうち理論信号値生成部61Dが出力してきた1種類だけ保持するための少ないメモリで機能を実現できる。またこの場合比較判定部61Cは順番に出力されてくるarray2がいかにarray1に一致するか評価し続け、最もarray1によく一致するarray2が出力されてくるのを見つけることで最適な(A,α)を見つけることができる。
また、これまでに述べてきた1次元配列array1、array2は近似式を用いてその近似式の係数を記憶することで、記憶容量を削減することも可能である。この場合、信号対推移取得部61A、理論信号値記憶部61Bの少なくとも一方は1次元配列の代わりに近似式の係数を記憶しても良い。よって大幅にメモリの削減ができる。
なお、以下の例外を除いて、(A,α)が異なれば、信号対の推移の態様(リサージュ曲線の形状)が異なる。例外は、βが90°の場合と0゜の場合、すなわち、第2のMR素子において、自由層51の磁化容易軸方向DA1が磁化固定層53の磁化方向(第1の方向D1)に対して平行な場合と直交している場合である。これらの場合には、Aが等しいという前提の下で、α=γ(γは0°より大きく90°より小さい)のときと、α=180°−γのときに、信号対の推移の態様(リサージュ曲線の形状)が等しくなる。そのため、第2のMR素子において、自由層51の磁化容易軸方向DA1は、磁化固定層53の磁化方向(第1の方向D1)に対して平行ではなく且つ直交していないことが好ましい。
なお、補正情報(A,α)を求めるためには、信号対推移取得部61Aによって、回転磁界MFの方向DMが所定範囲で回転する過程で得られる信号対の推移を取得する必要がある。信号対推移取得部61Aは、予め決められた時間以上の時間間隔を開けて、回転磁界センサ1の動作中であって回転磁界MFの方向DMが所定範囲以上回転したときに、信号対の推移を取得するように設定されていてもよい。あるいは、信号対推移取得部61Aは、使用者の指示があったときに、信号対の推移を取得するように設定されていてもよい。
第1の演算回路61は、信号対推移取得部61Aによって、新たな信号対の推移が取得され、それに応じて新たな信号対の推移の態様(リサージュ曲線の形状)が得られたときに、新たな補正情報(A,α)を求め、出力する補正情報(A,α)を更新する。
次に、図3を参照して、第2の演算回路62の作用と、検出値θsの算出方法について説明する。図3に示したように、第2の演算回路62には、第1および第3の信号S1,S3と補正情報(A,α)が入力される。第2の演算回路62は、第1の信号S1、第3の信号S3および補正情報(A,α)を用いて、補正された検出値θsを算出する。
ここで、検出値θsの算出方法の一例について説明する。この例では、第2の演算回路62は、まず、式(1)、(2)に、第1の演算回路61によって求められた補正情報(A,α)を代入する。次に、式(1)、(2)において、角度θを所定の角度間隔で変化させて、角度θと、第1および第3の信号S1,S3の計算値との対応関係を示すテーブルを作成する。表1に、角度θと第1の信号S1の計算値との対応関係を示すテーブルを示す。このテーブルと同様に、角度θと第3の信号S3の計算値との対応関係を示すテーブルも作成される。
表1において、θ0,θ1,・・・,θmは、0°以上360°未満の範囲内で所定の角度間隔を開けて選択された角度θの値の順列である。S10,S11,・・・,S1mは、それぞれ、式(1)にθ0,θ1,・・・,θmを代入して得られた第1の信号S1の計算値を表している。ここで、順列θ0,θ1,・・・,θm中の任意の値をθnと表し、式(1)にθnを代入して得られた第1の信号S1の計算値をS1nと表す。
第2の演算回路62は、次に、表1に示したテーブルを用いて、第2の演算回路62に入力された第1の信号S1に最も近い計算値S1nを検索する。具体的には、第2の演算回路62は、第1の信号S1との差の2乗が最小となる計算値S1nを検索する。第2の演算回路62は、この検索によって得られた計算値S1nに対応する角度θnを、検出値θsの第1の候補とする。
角度θが0°以上360°未満の範囲内では、第1の信号S1が最大値または最小値となる場合を除いて、2つの異なるθのときに第1の信号S1は同じ値となる。そのため、上記の方法では、ほとんどの場合、第1の信号S1の1つの値に対して、検出値θsの第1の候補は2つ得られる。
同様に、第2の演算回路62は、角度θと第3の信号S3の計算値との対応関係を示すテーブルを用いて、第2の演算回路62に入力された第3の信号S3に最も近い計算値S3nを検索し、この検索によって得られた計算値S3nに対応する角度θnを、検出値θsの第2の候補とする。このときも、ほとんどの場合、第3の信号S3の1つの値に対して、検出値θsの第2の候補は2つ得られる。
2つの第1の候補のうちの一方と、2つの第2の候補のうちの一方は、一致するか極めて近いはずである。第2の演算回路62は、一致する第1の候補と第2の候補が存在する場合には、その一致する第1および第2の候補を、補正された検出値θsとする。第2の演算回路62は、一致する第1の候補と第2の候補が存在しないが、極めて近い第1の候補と第2の候補が存在する場合には、例えば、それらのうち、計算値S1nと第1の信号S1との差の2乗と、計算値S3nと第3の信号S3との差の2乗のうち、小さい値となる方のS1nまたはS3nに対応する候補を、補正された検出値θsとする。
以上説明したように、本実施の形態に係る回転磁界センサ1では、第1の演算回路61によって、回転磁界MFの方向DMが所定範囲で回転する過程で得られる信号対の推移の態様に基づいて、補正情報(A,α)を求め、第2の演算回路62によって、第1の信号S1、第3の信号S3および補正情報(A,α)を用いて、補正された検出値θsを算出する。これにより、本実施の形態によれば、第1のMR素子と第3のMR素子に後天的に第2の磁気異方性が生じた場合でも、第2の磁気異方性に起因して検出値θsに生じる誤差を低減することが可能になる。
なお、本実施の形態において、第2の演算回路62は、第1の信号S1および補正情報(A,α)を用いて、補正された検出値として、補正された第1の信号を算出するようにしてもよい。この補正された第1の信号は、例えば、前述のようにして求められた計算値S1nとすることができる。同様にして、第2の演算回路62は、第3の信号S3および補正情報(A,α)を用いて、補正された第3の信号を算出するようにしてもよい。この補正された第3の信号は、例えば、前述のようにして求められた計算値S3nとすることができる。
本実施形態において、第2の演算回路62は、第1の信号S1と第3の信号S3と補正情報(A、α)とを入力し、第1の信号S1および第3の信号S3の等分化された1次および3次の高調波成分とする第1の補正量S1eおよび第3の補正量S3eを出力する補正量演算部62Aと、第1の信号S1と前記第3の信号S3と第1の補正量S1eと第3の補正量S3eとを入力し、第1の信号S1から第1の補正量S1eを減算し、第3の信号S3から第3の補正量S3eを減算するともに、減算された第1の補正信号S1nおよび第3の補正信号S3nを出力する補正信号演算部62Bと、第1の補正信号S1nおよび第3の補正信号S3nを入力し、補正された検出値θsを算出する検出値演算部62Cとを有する構成としてもよい。以下に説明する。
図11は、第2の演算回路62の構成の一例を示すブロック図である。この例では、第2の演算回路62は、補正量演算部62Aと、補正信号演算部62B及び検出値演算部62Cを有している。
本実施形態では、まず、第1の演算回路61によって求められた補正情報(A,α)と第1の信号S1と第3の信号S3が、第2の演算回路62の有する補正量演算部62Aに入力される。補正量演算部62Aは、以下に示す式(4)、(5)で示される第1の信号S1の補正量S1eと、第3の信号S3の補正量S3eを近似的に計算する。
…(4)
…(5)
ここで、式(4)、(5)について説明する。磁気抵抗素子の自由層に、例えば、後天的に生じた磁気異方性により、第1の信号S1および第3の信号S3の波形は、式(1)と式(2)で表せ、奇数次の高調波成分を含み、図7の符号71で示される理想的な波形(正弦波形)に対して、符号72で示される波形は歪んだ波形になっている。ここで式(1)、式(2)中のAは、その値が微小とみなせる場合、第1の信号および第3の信号中のsin{2(θ―α)}をフーリエ展開した奇数次の高調波成分において、A・sin{2(θ―α)}の5次以降の高調波成分は極小になる。なお、自由層に後天的に誘導磁気異方性が発生した場合、偶数次の高調波成分は発生しないので、奇数次のみを扱えばよい。ここで、Aの範囲は概ね2°以下である。
ここで、理想的な波形(正弦波形)と、第1の信号S1および第3の信号S3の波形との差分は、検出値の誤差を生む成分と言うことができ、第1の信号S1および第3の信号S3の補正すべき量となる。式中のAの範囲が微小とみなせる場合、この差分は等分化された1次の成分および3次の高調波成分に近似することができることが知られている。等分化とは、等しい信号振幅のことを指す。これより、補正量演算部62Aは、第1の信号S1の補正量S1eと、第3の信号S3の補正量S3eを、式(4)、式(5)を使って近似的に表現でき、複雑な演算器を用いることなく、算出することが可能となっている。
以上に記載した、第1の信号S1および第3の信号S3の補正すべき量について、詳細を説明する。の通り、後天的に生じた磁気異方性により生じる成分は、第1および第3の信号S1,S3の式(1)および(2)と、理想的な波形(正弦波形)であるsinθおよびcosθとの差分ということができ、式(6)、(7)で表すことができる。これが、第1の信号S1および第3の信号S3の補正すべき量となる。
S1e=sin[θ−Asin{2(θ−α)}]−sinθ …(6)
S3e=cos[θ−Asin{2(θ−α)}]−cosθ …(7)
この式(6)、(7)は、三角関数の加法定理より、各々式(8)、(9)に変換できる。
…(8)
…(9)
ここで、補正情報Aが小さい場合、式(10)および(11)の近似が成り立つ。
cos[Asin{2(θ−α)}]≒1 …(10)
sin[Asin{2(θ−α)}]≒(A・π/180)・sin{2(θ−α)}
…(11)
この式(10)、(11)を式(8)、(9)に代入し、三角関数の積和の公式より展開すると、以下の式(12)、(13)となる。
…(12)
…(13)
この式(12)、(13)は、第1の信号S1および第3の信号S3の補正すべき量が、A/2倍された一倍角および三倍角と等価であることを示している。つまりA値が小さい場合は、5次以降の高調波成分は極小になり、A/2倍に等分化された一次成分および、3次高調波成分に近似するとこができる。式(4)及び(5)は、上記式(12)および(13)を、三角関数の加法定理および三倍角の公式を用いて展開したものである。
なお、補正信号演算部62Aにおいて、補正情報(A、α)より、式(4)および式(5)中のcos(2α)及びsin(2α)を求める手段として、αに対する数値テーブル表を用意しておき、このテーブル表から求めてもよい。また、補正信号演算部62Aに、CORDICアルゴリズムを持った演算器を所有してもよく、この演算器を利用して、cos(2α)及びsin(2α)を求めてもよい。
第2の演算回路62は、次に、補正信号演算部62Bにおいて、補正された第1の信号S1nと補正された第3の信号S3nを演算する。まず、補正信号演算部62Bに、第1の信号S1と、第3の信号S3と、第1の信号S1の補正量S1eと、第3の信号S3の補正量S3eが入力される。次に、式(14)、(15)において、第1の信号S1より補正量S1eを減算することで、補正された第1の信号S1nを算出し、第3の信号S3より補正量S3eを減算することで、補正された第3の信号S3nを算出する。
S1n=S1−S1e …(14)
S3n=S3−S3e …(15)
第2の演算回路62は、次に、検出値演算部62Cにおいて、補正された第1の信号S1n,補正された第3の信号S3nから、下記の式(16)によって、補正された検出値θsを演算する。なお、”arctan”は、アークタンジェントを表す。
θs=arctan(S1n/S3n) …(16)
仮に補正情報Aが1°の場合、検出値θsの誤差は±1°となるが、本実施形態で補正された検出値θsの誤差は、±0.02°以下になる。
なお、θsが0°以上360°未満の範囲内では、式(4)におけるθsの解には、180°異なる2つの値がある。しかし、S1nとS3nの正負の組み合わせにより、θsの真の値が式(4)におけるθsの2つの解のいずれであるかを判別することができる。すなわち、S1nが正の値のときは、θsは0°よりも大きく180゜よりも小さい。S1nが負の値のときは、θsは180°よりも大きく360゜よりも小さい。S3nが正の値のときは、θsは、0°以上90゜未満、および270°より大きく360°以下の範囲内である。S3nが負の値のときは、θsは90°よりも大きく270゜よりも小さい。θsは、式(4)と、上記のS1nとS3nの正負の組み合わせの判定によって求めることができる。以上の第2の演算回路62において補正された第1の信号を算出する方法は、上記のように数式による演算処理のみで完了するため算出時間が短くなり、またテーブルなどを格納するためのメモリも不要となる。
なお、補正された第1の信号S1nを使ったsin逆関数の式(23)、もしくは補正された第3の信号S3nを使ったcos逆関数の式(24)を用いて、補正された検出値θsを演算してもよい。この場合、検出値θsの候補は2つ得られるが、信号S1nと信号S3nの正負の関係に基づいて、真の検出値θsとして特定することができる。なお、下記の式(23)の”arcsin”は、アークサインを表し、下記の式(24)の”arccos”は、アークコサインを表す。
θs=arcsin(S1n) …(23)
θs=arccos(S3n) …(24)
また、本実施の形態において、第2の検出回路20は、第3の検出回路30と同様に、回転磁界MFの第2の方向D2の成分を検出するように構成されていてもよい。この場合、信号対推移取得部61Aによって取得される信号対の推移(リサージュ曲線)は、円形に近いものとなる。この場合も、原則として、(A,α)が異なれば、信号対の推移の態様(リサージュ曲線の形状)が異なる。
また、本実施の形態において、第1および第2の検出回路10,20が回転磁界MFの第2の方向D2の成分を検出するように構成され、第3の検出回路30が回転磁界MFの第1の方向D1の成分を検出するように構成されていてもよい。この場合、信号対推移取得部61Aによって取得される信号対の推移(リサージュ曲線)は、本実施の形態において既に説明した信号対の推移(リサージュ曲線)に似たものとなる。
また、本実施の形態において、高い測定精度が必要な場合には、第1および第2の信号S1,S2を規格化する処理を行って、規格化後の信号S1,S2を第1の演算回路61に入力させてもよい。この規格化の処理は、規格化後の信号S1,S2の最大値同士、最小値同士がそれぞれ等しくなるように、線形演算によって、規格化前の信号S1,S2を規格化後の信号S1,S2に変換する処理である。
また、回転磁界センサ1は、補正情報(A,α)を求めるために回転磁界MFの方向DMが回転する必要のある所定範囲(例えば360°)よりも小さい角度範囲内の角度を検出する用途に使用される場合もある。この場合には、回転磁界MFの方向DMを所定範囲以上回転させて補正情報(A,α)を求めた後、実際の角度の検出を行うようにすればよい。
また、本実施の形態において、第3の検出回路30の代わりに、基準位置PRにおける回転磁界MFの、第2の方向D2の成分の正負の判別のみを行う判別回路を設けてもよい。この判別回路は、例えば、第2の方向D2に感度を有する磁気検出素子と、この磁気検出素子の検出出力を、所定のしきい値を用いて2値化する回路とによって実現することができる。第2の方向D2に感度を有する磁気検出素子としては、例えば、磁化固定層の磁化の方向が第2の方向D2に平行な方向に設定されたTMR素子またはGMR素子や、第2の方向D2に感度を有するように設定されたホール素子を用いることができる。この場合、第2の演算回路62は、前述の検索によって得られた計算値S1nに対応する検出値θsの第1の候補と、判別回路によって得られる正負の判別結果とに基づいて、検出値θsを決定する。前述のように、ほとんどの場合、第1の信号S1の1つの値に対して、検出値θsの第1の候補は2つ得られる。この2つの候補の一方が0゜よりも大きく90°よりも小さいときには、2つの候補の他方は90゜よりも大きく180°よりも小さい。また、2つの候補の一方が180゜よりも大きく270°よりも小さいときには、2つの候補の他方は270゜よりも大きく360°よりも小さい。一方、角度θが0°以上90゜未満、および270°よりも大きく360°以下の範囲内のときは、第2の方向D2の成分は正の値であり、θsが90°よりも大きく270゜よりも小さいときには、第2の方向D2の成分は負の値である。従って、上記判別回路の判別結果を用いれば、検出値θsの2つの第1の候補のうちの一方を、真の検出値θsとして特定することができる。
また、回転磁界センサ1が、角度θが90°以上270゜以下の範囲内あるいは0°以上90゜以下および270°以上360゜未満の範囲内となる用途に使用される場合には、第3の検出回路30はなくてもよい。すなわち、この場合には、検出値θsの第1の候補は1つしか得られないので、この候補を検出値θsとすることができる。
なお、本発明は、上記各実施の形態に限定されず、種々の変更が可能である。例えば、本発明における磁気検出素子としては、スピンバルブ型のMR素子(GMR素子、TMR素子)に限らず、何らかの形で磁気異方性を持ち得るものであればよい。例えば、磁気検出素子としては、AMR(異方性磁気抵抗効果)素子を用いてもよい。また、第1および第3の磁気異方性は、形状磁気異方性に限らず、結晶磁気異方性や、応力磁気異方性によって設定されてもよい。
また、本発明は、上記実施の形態、つまり、回転磁界センサと円柱状の磁石が平行に配置される場合のみに適用されるものではなく、回転磁界センサが磁石に対して傾いた場合であっても適用できる。この場合、基準平面も回転磁界センサの傾きに応じて傾き、基準方向、基準位置も回転磁界センサの傾きに応じて傾く。つまり、回転磁界センサと基準平面と基準方向と基準位置は一体とすることが可能である。また、例えば、リニアセンサのようなNS磁石を直線上に複数個配置し、NS磁石の配置方向と平行に回転センサが移動する場合であっても、本発明は適用可能である。この場合、回転磁界センサの直線移動量に応じて、回転磁界センサの回転角が変化することになる。例えば、NS磁石の配置方向と回転磁界センサを形成する膜の積層方向を直交とし、回転磁界センサの移動方向がが回転磁界センサと一体となった基準平面内に含まれるように、回転磁界センサを配置すれば、NS磁石の発生する磁界に応じて磁気抵抗素子の自由層が回転することとなる。従って、回転磁界センサの回転角と回転磁界センサの直線移動量が対応することになる。このように本発明は、回転体の角度検出に限るものではなく、様々な相対移動量に基づく磁界検出を行う回転磁界センサに適用可能である。