JP5894098B2 - 位置ずれ量測定方法及び画像記録装置 - Google Patents
位置ずれ量測定方法及び画像記録装置 Download PDFInfo
- Publication number
- JP5894098B2 JP5894098B2 JP2013053226A JP2013053226A JP5894098B2 JP 5894098 B2 JP5894098 B2 JP 5894098B2 JP 2013053226 A JP2013053226 A JP 2013053226A JP 2013053226 A JP2013053226 A JP 2013053226A JP 5894098 B2 JP5894098 B2 JP 5894098B2
- Authority
- JP
- Japan
- Prior art keywords
- recording
- deviation amount
- head
- repetition period
- positional deviation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J29/00—Details of, or accessories for, typewriters or selective printing mechanisms not otherwise provided for
- B41J29/38—Drives, motors, controls or automatic cut-off devices for the entire printing mechanism
- B41J29/393—Devices for controlling or analysing the entire machine ; Controlling or analysing mechanical parameters involving printing of test patterns
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/21—Ink jet for multi-colour printing
- B41J2/2132—Print quality control characterised by dot disposition, e.g. for reducing white stripes or banding
- B41J2/2135—Alignment of dots
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/21—Ink jet for multi-colour printing
- B41J2/2132—Print quality control characterised by dot disposition, e.g. for reducing white stripes or banding
- B41J2/2146—Print quality control characterised by dot disposition, e.g. for reducing white stripes or banding for line print heads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/21—Ink jet for multi-colour printing
- B41J2/2132—Print quality control characterised by dot disposition, e.g. for reducing white stripes or banding
- B41J2/2142—Detection of malfunctioning nozzles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J29/00—Details of, or accessories for, typewriters or selective printing mechanisms not otherwise provided for
- B41J29/38—Drives, motors, controls or automatic cut-off devices for the entire printing mechanism
- B41J29/393—Devices for controlling or analysing the entire machine ; Controlling or analysing mechanical parameters involving printing of test patterns
- B41J2029/3935—Devices for controlling or analysing the entire machine ; Controlling or analysing mechanical parameters involving printing of test patterns by means of printed test patterns
Description
<インクジェットプリンタの構成>
図1に示すように、本発明の画像記録装置に相当するインクジェットプリンタ(以下、単にプリンタという)10は、外部のホストコンピュータ11に接続されている。このプリンタ10は、搬送機構(相対移動部)12により搬送される記録紙(記録媒体、図2参照)13に対して、ホストコンピュータ11から入力された画像データに基づき記録ヘッド14から記録紙13上にインク滴を打滴して画像を記録する。なお、図1では、主に画像データの処理に関連する部分のみを示している。
図4に示すように、CPU24は、メモリ34から位置ずれ量ΔYの測定や位置ずれ補正に係るプログラムを読み出して実行することで、テストチャート記録制御部(記録制御部)38、濃度プロファイルデータ算出部39、補完処理部40、繰り返し周期算出部41、積算濃度プロファイル算出部42、基準位置ずれ量算出部43、位置ずれ量算出部44、位置ずれ補正処理部45として機能する。
(濃度プロファイルの算出)
図6(A),(B)に示すように、濃度プロファイルデータ算出部39は、読取画像データ32を解析して、第1ドットパターン群48Aが記録されている画像領域の副走査方向の濃度変化を示す第1の濃度プロファイル53Aを算出する。この第1の濃度プロファイル53Aは、予め定めた基準位置X0を基準として、この基準位置X0からの副走査方向に沿った上記画像領域の濃度変化を示すものである。第1の濃度プロファイル53Aは、各第1ドットパターン50Aに対応する位置の濃度が高くなり、逆に各第1ドットパターン50Aの間に対応する位置の濃度が低くなる。
図6(C)に示すように、補完処理部40は、第1の濃度プロファイル53Aの各測定点の測定値の間に線形補完データを補完(補間ともいう)する補完処理(線形補完処理)を行って、第1の濃度プロファイル53Aの副走査方向の解像度を100dpiから10000dpiに高解像化する。例えば、イメージスキャナ16のイメージセンサの解像度を「Rm」とし、高解像度化した時の解像度を「Rh」とし、任意の測定点iの測定値(濃度値)を「Di」とし、その隣の測定点i+1の測定値を「Di+1」とした場合に、線形補完データ「Di(j)」は以下の式(1)で表される。ただし、j=1〜((Rh÷Rm)−1)の整数である。補完処理部40は、高解像化した第1の濃度プロファイル53A1を繰り返し周期算出部41へ出力する。
図7(A)に示すように、繰り返し周期算出部41は、第1の濃度プロファイル53A1に基づき、第1ドットパターン50Aに対応する濃度変化の繰り返し周期(すなわち、濃度値のピークがどれくらいの周期で現れるか)を示す繰り返し周期長W2を算出する。この繰り返し周期長W2は前述のパターン間隔W1と完全に一致するものではなく、記録紙13の搬送速度の誤差、記録紙13の変形、イメージスキャナ16の読み取りの誤差などの解像度変動要因により、繰り返し周期長W2とパターン間隔W1との間には数%程度の誤差が生じる。なお、繰り返し周期長W2が正確に求められていないと、後述の積算濃度プロファイル算出部42による積算平均時に各第1ドットパターン50Aに対応するピーク値が平均化されてしまうため、正確な積算が行えず正確なピークの位置(図11参照)を求められない。そこで、繰り返し周期算出部41は、以下の方法により、繰り返し周期長W2を正確に算出する。
図7(A),(B)に示すように、積算濃度プロファイル算出部42は、第1の濃度プロファイル53A1の濃度値を、繰り返し周期長W2毎に積算平均して、第1の積算濃度プロファイル56Aを算出する。積算濃度プロファイル算出部42は、第1の積算濃度プロファイル56Aを基準位置ずれ量算出部43へ出力する。
図7(C)に示すように、基準位置ずれ量算出部43は、第1の積算濃度プロファイル56Aを解析して、第1ヘッドモジュール28Aの記録位置の基準位置ずれ量Δy1を算出する。以下、基準位置ずれ量Δy1の算出方法について具体的に説明を行う。
次いで、図12に示すように、濃度プロファイルデータ算出部39から基準位置ずれ量算出部43までの各部39〜43は、第2ヘッドモジュール28Bの記録位置の基準位置ずれ量Δy2の算出を行う。この基準位置ずれ量Δy2の算出処理は、前述の基準位置ずれ量Δy1の算出処理と基本的に同じである。
図13に示すように、位置ずれ量算出部44は、基準位置ずれ量Δy1と基準位置ずれ量Δy2との差分、すなわち、第1ドットパターン50Aに対応するピーク位置XPと第2ドットパターン50Bに対応するピーク位置XPとの差分に基づき、位置ずれ量ΔYを算出する。各基準位置ずれ量Δy1,Δy2(各ピーク位置XP)は、それぞれ共通の基準位置X0を基準として算出されているので、両者の差分をとることで第1及び第2ヘッドモジュール28A,28B間の記録位置の位置ずれ量ΔYを算出することができる。位置ずれ量算出部44は、位置ずれ量ΔYの算出結果を位置ずれ補正処理部45へ出力する。なお、位置ずれ量ΔYは、図3に示した設計位置からのずれ量と、千鳥配置によるずれ量、及び、テストチャート記録時に各ヘッドモジュールに設定されたインク吐出タイミングの誤差、とを含む記録位置の位置ずれ量である。
図4に戻って、位置ずれ補正処理部45は、位置ずれ量ΔYの検出結果に基づき、第1及び第2ヘッドモジュール28A,28B間の記録位置を補正する位置ずれ補正処理を行う。例えば、位置ずれ補正処理部45は、後処理演算部21を制御して印字データに位置ずれ補正処理を施して、第1及び第2ヘッドモジュール28A,28Bのいずれか一方の記録開始タイミングを他方に対して早めるあるいは遅らせる。これにより、第1及び第2ヘッドモジュール28A,28B間の記録位置の位置ずれが補正される。なお、ヘッドモジュール間の記録位置の位置ずれを補正する位置ずれ補正方法としては様々な方法が知られており、これらのいずれを用いてもよい。
次に、上記構成のプリンタ10の作用、特に位置ずれ量ΔYの測定処理並びに画像記録処理について説明を行う。なお、ここでは第1及び第2ヘッドモジュール28A,28B間の記録位置の位置ずれ量ΔYを測定する場合について説明を行う。
図15に示すように、テストチャート記録制御部38の制御の下、メモリ34内のテストチャートデータ35が画像ページメモリ18に出力された後、画像バッファメモリ書込制御部19と画像バッファメモリ20と転送制御部22とを介して、テストチャートデータ35に基づく1回の打滴分の印字データが逐次にヘッドドライバ23へ転送される。ヘッドドライバ23は、印字データに基づき、各ヘッドモジュール28A〜28Cの各ノズル27のインク吐出を制御する。そして、搬送機構12により記録紙13を副走査方向に搬送しつつ、各ヘッドモジュール28A〜28Cによりインク滴36を打滴することで、記録紙13の記録面上にテストチャート31が記録される(ステップS21、記録ステップ)。
テストチャート31の記録後、CPU24は、既知の記録紙13の搬送速度情報に基づきテストチャート31をトラッキングする。そして、CPU24は、テストチャート31がイメージスキャナ16を通過するタイミングに合わせてイメージスキャナ16による読み取りを開始させる。これにより、テストチャート31がイメージスキャナ16により読み取られ、読取画像データ32がイメージスキャナ16から濃度プロファイルデータ算出部39へ出力される(ステップS22、読取ステップ)。
図16に示すように、濃度プロファイルデータ算出部39は、読取画像データ32を解析して、図6(B)に示したような第1の濃度プロファイル53Aを算出する(ステップS26、濃度プロファイル算出ステップ)。この第1の濃度プロファイル53Aは、濃度プロファイルデータ算出部39から補完処理部40へ出力される。
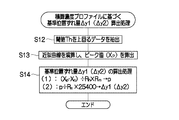
図15に戻って、基準位置ずれ量Δy1の算出処理後、第2ヘッドモジュール28Bの記録位置の基準位置ずれ量Δy2の算出処理が開始される(ステップS32)。この基準位置ずれ量Δy2の算出処理でも、図16に示したステップS26からステップS30までの処理が再度実行される。これにより、図12に示したような第2の濃度プロファイル53Bの算出、第2の濃度プロファイル53B1の生成、繰り返し周期長W2の算出、第2の積算濃度プロファイル56Bの算出が行われた後、第2ヘッドモジュール28Bの記録位置の基準位置ずれ量Δy2が算出される。この基準位置ずれ量Δy2の算出結果も位置ずれ量算出部44へ出力される。
位置ずれ量算出部44は、図13に示したように、基準位置ずれ量Δy1と基準位置ずれ量Δy2との差分(第1ドットパターン50Aに対応するピーク位置XPと第2ドットパターン50Bに対応するピーク位置XPとの差分)に基づき、位置ずれ量ΔYを算出する(ステップS33、位置ずれ量算出ステップ)。この位置ずれ量ΔYの算出結果は、位置ずれ量算出部44から位置ずれ補正処理部45へ出力される。以上で位置ずれ量測定処理(ステップS20、図14参照)が完了する。
図14に戻って、図示しない操作部等で印刷開始操作がなされると(ステップS36)、ホストコンピュータ11から送られてくる画像データがホストI/F部17を介して画像ページメモリ18に格納される(ステップS37)。そして、CPU24の制御の下、画像データに基づく1回の打滴分の印字データが逐次にヘッドドライバ23へ転送される。この際に、位置ずれ補正処理部45は、位置ずれ量ΔYの検出結果に基づき、後処理演算部21を制御して、印字データに対して位置ずれ補正処理を行う。これにより、第1及び第2ヘッドモジュール28A,28B間の記録位置の位置ずれが補正される(ステップS38)。
このように本実施形態では、テストチャート31の読取画像を基に第1及び第2の積算濃度プロファイル56A,56Bをそれぞれ算出し、これらに基づき位置ずれ量ΔYを測定するので、高解像度のイメージセンサを用いることなく、ヘッドモジュール間の記録位置の位置ずれ量を低コストかつ高精度に測定することができる。
次に、図17を用いて本発明の第2実施形態のプリンタ70について説明を行う。上記第1実施形態では、各ヘッドモジュール28A〜28Cがそれぞれ記録紙13に記録を行う記録領域がオーバラップしていないが、プリンタ70では互いに隣接するヘッドモジュールの記録領域がオーバラップしている。なお、プリンタ70は、第1実施形態とは異なる記録ヘッド72を備える点を除けば、第1実施形態のプリンタ10と基本的には同じ構成である。このため、上記第1実施形態と機能・構成上同一のものについては、同一符号を付してその説明は省略する。
<インクジェットプリンタの構成>
次に、図20を用いて本発明の第3実施形態のプリンタ80について説明を行う。上記第2実施形態では、各ヘッドモジュール73A〜73Cのノズル27のみでテストチャート75の記録を行う。これに対して、プリンタ80では、各ヘッドモジュール73A〜73Cのノズル27aのみを用いて記録紙13のオーバラップ記録領域にテストチャート81を記録するとともに、このテストチャート81の読取画像に基づき位置ずれ量ΔYを測定する。
CPU83は、メモリ34から位置ずれ量ΔYの測定や位置ずれ補正に係るプログラムを読み出して実行することで、テストチャート記録制御部(記録制御部)85、濃度プロファイルデータ算出部86、補完処理部87、繰り返し周期算出部88、積算濃度プロファイル算出部89、位置ずれ量算出部90、位置ずれ補正処理部45として機能する。
テストチャート記録制御部85は、第1実施形態のテストチャート記録制御部38と同様に、テストチャートデータ35を画像ページメモリ18に出力するとともに、画像バッファメモリ書込制御部19、転送制御部22、及びヘッドドライバ23を作動させて、テストチャート81の記録を実行させる。ただし、この際に、テストチャート記録制御部85は、ノズル27からのインク滴36の吐出は禁止(停止)する。すなわち、各ヘッドモジュール73A〜73Cのノズル27aのみでオーバラップ記録領域OLA(図21参照)にテストチャート81を記録する。
図22(A),(B)に示すように、濃度プロファイルデータ算出部86は、イメージスキャナ16から取得したテストチャート81の読取画像データ32を解析して、記録紙13のオーバラップ記録領域OLAの副走査方向の濃度変化を示す第3の濃度プロファイル96を算出する。この第3の濃度プロファイル96は、第1及び第2ドットパターン94A,94Bに対応する位置の濃度が高くなり、逆に第1及び第2ドットパターン94A,94Bの間に対応する位置の濃度が低くなる。なお、第1実施形態と同様に、イメージスキャナ16の副走査方向の解像度が低いので、第3の濃度プロファイル96の副走査方向の解像度も低くなる。濃度プロファイルデータ算出部86は、第3の濃度プロファイル96を補完処理部87へ出力する。
図22(C)に示すように、補完処理部87は、第3の濃度プロファイル96に対して第1実施形態と同様の線形補完処理を施して、第3の濃度プロファイル96の副走査方向の解像度を例えば100dpiから10000dpiに高解像化する。第3の濃度プロファイル96を副走査方向に高解像度化することで、位置ずれ量ΔYをより高精度に算出することができる。補完処理部40は、高解像化した第3の濃度プロファイル96aを繰り返し周期算出部88へ出力する。
次に、上記構成のプリンタ80の作用、特に位置ずれ量ΔYの測定処理について説明を行う。なお、位置ずれ補正処理を含む画像記録処理については第1実施形態と同じであるのでここでは説明を省略する。また、ここでは第1及び第2ヘッドモジュール73A,73B間の記録位置の位置ずれ量ΔYを測定する場合について説明を行う。
このように本発明の第3実施形態では、オーバラップ記録領域OLAに記録されたテストチャート81を解析することで、第1実施形態のようにヘッドモジュール毎の基準位置ずれ量Δy1,Δy2を算出することなく、位置ずれ量ΔYを直接算出することができる。これにより、位置ずれ量ΔYの算出に要する時間を短縮することができる。また、第1実施形態と同様に、高解像度のイメージセンサを用いることなく、ヘッドモジュール間の記録位置の位置ずれ量を低コストかつ高精度に測定することができる。
次に、図1に示したプリンタ10の一例であるプリンタ100の構成例について説明する。
給紙部112には、枚葉紙である記録紙13が積層されている。給紙部112の給紙トレイ150から記録紙13が一枚ずつ処理液付与部114に給紙される。記録紙13として、枚葉紙(カット紙)を用いているが、連続用紙(ロール紙)から必要なサイズに切断して給紙する構成も可能である。
処理液付与部114は、記録紙13の表面に処理液を付与する機構である。処理液は、記録部116で付与されるインク中の色材(本例では顔料)を凝集させる色材凝集剤を含んでおり、この処理液とインクとが接触することによって、インクは色材と溶媒との分離が促進される。
記録部116は、描画ドラム170、用紙抑えローラ174、及びインクジェットヘッド250(インクジェットヘッド172M,172K,172C,172Y)を備えている。描画ドラム170は、処理液ドラム154と同様に、その外周面に爪形状の保持手段(グリッパー)171を備える。
乾燥部118は、色材凝集作用により分離された溶媒に含まれる水分を乾燥させる機構であり、乾燥ドラム176、及び溶媒乾燥装置178を備えている。乾燥ドラム176は、処理液ドラム154と同様に、その外周面に爪形状の保持手段(グリッパー)177を備え、この保持手段177によって記録紙13の先端を保持できるようになっている。
定着部120は、定着ドラム184、ハロゲンヒータ186、定着ローラ188、及びインラインセンサ190で構成される。定着ドラム184は、処理液ドラム154と同様に、その外周面に爪形状の保持手段(グリッパー)185を備え、この保持手段185によって記録紙13の先端を保持できるようになっている。
定着部120に続いて排紙部122が設けられている。排紙部122は、排出トレイ192を備えており、この排出トレイ192と定着部120の定着ドラム184との間に、これらに対接するように渡し胴194、搬送ベルト196、張架ローラ198が設けられている。記録紙13は、渡し胴194により搬送ベルト196に送られ、排出トレイ192に排出される。搬送ベルト196による用紙搬送機構の詳細は図示しないが、印刷後の記録紙13は無端状の搬送ベルト196間に渡されたバー(不図示)のグリッパーによって用紙先端部が保持され、搬送ベルト196の回転によって排出トレイ192の上方に運ばれてくる。
次に、記録部116に具備されるインクジェットヘッド172M,172K,172C,172Yの構造について説明する。なお、各色に対応するインクジェットヘッド172M,172K,172C,172Yの構造は共通しているので、以下、これらを代表してインクジェットヘッド250として説明を行う。
上記各実施形態では、互いに隣接するヘッドモジュール間の記録位置の位置ずれ量ΔYを算出しているが、隣接してない任意のヘッドモジュール間の記録位置の位置ずれ量ΔYも同様の方法で算出することができる。なお、位置ずれ量の測定を行うヘッドモジュール間の主走査方向の間隔が広がるほど、記録ヘッド72の傾き(記録紙13面に垂直な方向を軸とする記録ヘッド72の回転変位)、記録紙13の搬送速度の誤差、記録紙13の変形、イメージスキャナ16の読み取りの誤差等が位置ずれ量の測定結果に影響を及ぼす。このため、位置ずれ量ΔYの測定を行う測定対象として互いに隣接するヘッドモジュールを選択することで、より高精度に位置ずれ量ΔYを測定することができる。
Claims (10)
- 複数の記録素子を有するヘッドモジュールを第1の方向に複数配列してなる記録ヘッドと、記録媒体とを前記第1の方向と直交する第2の方向に相対移動させながら、前記複数のヘッドモジュールのうちの第1のヘッドモジュール及び第2のヘッドモジュールの各々により、前記第1の方向に延びた形状のドットパターンを前記第2の方向に予め定めた間隔で前記記録媒体上に記録させる記録ステップと、
前記記録ステップで前記記録媒体上に記録された前記ドットパターンを光学的に読み取る読取ステップと、
前記読取ステップで読み取られた前記ドットパターンの読取画像の前記第2の方向の濃度変化を示す濃度プロファイルを算出する濃度プロファイル算出ステップと、
前記濃度プロファイル算出ステップの算出結果に基づき、前記濃度プロファイル内での各前記ドットパターンに対応する波形の繰り返し周期を算出する繰り返し周期算出ステップと、
前記繰り返し周期算出ステップの算出結果に基づき、前記濃度プロファイルのデータを、前記繰り返し周期毎に積算して積算濃度プロファイルを算出する積算濃度プロファイル算出ステップと、
前記積算濃度プロファイル算出ステップの算出結果に基づき、前記第1のヘッドモジュールの記録位置と前記第2のヘッドモジュールの記録位置との前記第2の方向の位置ずれ量を算出する位置ずれ量算出ステップであって、前記積算濃度プロファイルにおける各前記ドットパターンにそれぞれ対応する波形のピーク位置を求め、各前記ピーク位置に基づいて前記位置ずれ量を算出する位置ずれ量算出ステップと、
を有する位置ずれ量測定方法。 - 前記濃度プロファイル算出ステップは、前記濃度プロファイルとして、前記第1のヘッドモジュールにより記録される第1のドットパターンに対応する第1の濃度プロファイルと、前記第2のヘッドモジュールにより記録される第2のドットパターンに対応する第2の濃度プロファイルとをそれぞれ算出し、
前記繰り返し周期算出ステップは、前記第1及び第2の濃度プロファイルに基づき、前記繰り返し周期として、前記第1のドットパターンに対応する波形の第1の繰り返し周期と、前記第2のドットパターンに対応する波形の繰り返し周期を示す第2の繰り返し周期とをそれぞれ算出し、
前記積算濃度プロファイル算出ステップは、前記積算濃度プロファイルとして、前記第1の濃度プロファイルのデータを前記第1の繰り返し周期毎に積算してなる第1の積算濃度プロファイルと、前記第2の濃度プロファイルのデータを前記第2の繰り返し周期毎に積算してなる第2の積算濃度プロファイルとをそれぞれ算出し、
前記位置ずれ量算出ステップは、前記第1の積算濃度プロファイルにおける前記第1のドットパターンに対応する波形の第1のピーク位置と、前記第2の積算濃度プロファイルにおける前記第2のドットパターンに対応する波形の第2のピーク位置とをそれぞれ求め、前記第1のピーク位置と第2のピーク位置との差分に基づき前記位置ずれ量を算出する請求項1記載の位置ずれ量測定方法。 - 前記第1のヘッドモジュールと前記第2のヘッドモジュールとが前記第1の方向において互いに隣接している請求項2記載の位置ずれ量測定方法。
- 前記第1及び第2のヘッドモジュールの各々の前記記録媒体上の記録領域の一部が互いにオーバラップしているオーバラップ記録領域である場合に、前記記録ステップは、前記オーバラップ記録領域以外の記録領域に記録を行う前記第1及び第2のヘッドモジュールの各々の前記記録素子によりそれぞれ前記第1のドットパターン、前記第2のドットパターンを記録する請求項3記載の位置ずれ量測定方法。
- 前記第1及び第2のヘッドモジュールの各々の前記記録媒体上の記録領域の一部が互いにオーバラップしているオーバラップ記録領域である場合に、
前記記録ステップは、前記ドットパターンとして、前記オーバラップ記録領域内に記録を行う前記第1及び第2のヘッドモジュールの前記記録素子により第1のドットパターンと第2のドットパターンとを前記第2の方向に個別に前記間隔でかつ交互に記録し、
前記濃度プロファイル算出ステップは、前記濃度プロファイルとして、前記第1のドットパターン及び第2のドットパターンに対応する第3の濃度プロファイルを算出し、
前記繰り返し周期算出ステップは、前記第3の濃度プロファイル内での前記第1及び第2のドットパターンに対応する波形の繰り返し周期を示す第3の繰り返し周期を算出し、
前記積算濃度プロファイル算出ステップは、前記積算濃度プロファイルとして、前記第3の濃度プロファイルのデータを前記第3の繰り返し周期毎に積算してなる第3の積算濃度プロファイルを算出し、
前記位置ずれ量算出ステップは、前記第3の積算濃度プロファイルにおける前記第1のドットパターンに対応する波形の第1のピーク位置と、前記第2のドットパターンに対応する波形の第2のピーク位置とをそれぞれ求め、前記第1のピーク位置と第2のピーク位置との差分に基づき前記位置ずれ量を算出する請求項1記載の位置ずれ量測定方法。 - 前記繰り返し周期算出ステップは、
前記濃度プロファイルのデータを、仮の繰り返し周期毎に積算して仮の積算濃度プロファイルを算出する仮積算濃度プロファイル算出ステップと、
前記仮の繰り返し周期を変化さながら、前記仮積算濃度プロファイル算出ステップを繰り返し実行して、前記仮の繰り返し周期毎の前記仮の積算濃度プロファイルを算出する繰り返しステップと、
前記仮の繰り返し周期毎の前記仮の積算濃度プロファイルの最大値を比較して、前記最大値が最大となる前記仮の繰り返し周期を前記繰り返し周期として決定する決定ステップと、を有する請求項1から5のいずれか1項記載の位置ずれ量測定方法。 - 前記濃度プロファイル算出ステップと前記繰り返し周期算出ステップとの間で、前記濃度プロファイルに対して補完処理を施して、当該濃度プロファイルの前記第2の方向の解像度を高くする補完処理ステップを実行する請求項1から6のいずれか1項記載の位置ずれ量測定方法。
- 前記第1の方向は、前記記録媒体の幅方向である請求項1から7のいずれか1項記載の位置ずれ量測定方法。
- 前記記録ヘッドは、インクジェットヘッドである請求項1から8のいずれか1項記載の位置ずれ量測定方法。
- 複数の記録素子を有するヘッドモジュールを第1の方向に複数配列してなる記録ヘッドと、
前記記録ヘッドと記録媒体とを前記第1の方向と直交する第2の方向に相対移動させる相対移動部と、
前記記録ヘッドと前記相対移動部とを制御して、前記複数のヘッドモジュールのうちの第1のヘッドモジュール及び第2のヘッドモジュールの各々により、前記第1の方向に延びた形状のドットパターンを前記第2の方向に予め定めた間隔で前記記録媒体上に記録させる記録制御部と、
前記第1のヘッドモジュール及び前記第2のヘッドモジュールによりそれぞれ前記記録媒体上に記録された前記ドットパターンを光学的に読み取る読取部と、
前記読取部で読み取られた前記ドットパターンの読取画像の前記第2の方向の濃度変化を示す濃度プロファイルを算出する濃度プロファイル算出部と、
前記濃度プロファイル算出部の算出結果に基づき、前記濃度プロファイル内での各前記ドットパターンに対応する波形の繰り返し周期を算出する繰り返し周期算出部と、
前記繰り返し周期算出部の算出結果に基づき、前記濃度プロファイルのデータを、前記繰り返し周期毎に積算して積算濃度プロファイルを算出する積算濃度プロファイル算出部と、
前記積算濃度プロファイル算出部の算出結果に基づき、前記第1のヘッドモジュールの記録位置と前記第2のヘッドモジュールの記録位置との前記第2の方向の位置ずれ量を算出する位置ずれ量算出部であって、前記積算濃度プロファイルにおける各前記ドットパターンにそれぞれ対応する波形のピーク位置を求め、各前記ピーク位置に基づいて前記位置ずれ量を算出する位置ずれ量算出部と、
を備える画像記録装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013053226A JP5894098B2 (ja) | 2013-03-15 | 2013-03-15 | 位置ずれ量測定方法及び画像記録装置 |
| PCT/JP2014/054370 WO2014141862A1 (ja) | 2013-03-15 | 2014-02-24 | 位置ずれ量測定方法及び画像記録装置 |
| US14/824,944 US9370954B2 (en) | 2013-03-15 | 2015-08-12 | Method for measuring amount of positional deviation and image-recording device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013053226A JP5894098B2 (ja) | 2013-03-15 | 2013-03-15 | 位置ずれ量測定方法及び画像記録装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014177057A JP2014177057A (ja) | 2014-09-25 |
| JP2014177057A5 JP2014177057A5 (ja) | 2015-06-11 |
| JP5894098B2 true JP5894098B2 (ja) | 2016-03-23 |
Family
ID=51536537
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013053226A Expired - Fee Related JP5894098B2 (ja) | 2013-03-15 | 2013-03-15 | 位置ずれ量測定方法及び画像記録装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9370954B2 (ja) |
| JP (1) | JP5894098B2 (ja) |
| WO (1) | WO2014141862A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016129989A (ja) * | 2015-01-15 | 2016-07-21 | 武藤工業株式会社 | 測色による作画調整方法及び装置 |
| JP7153425B2 (ja) * | 2017-01-23 | 2022-10-14 | セイコーエプソン株式会社 | スキャナー、スキャンプログラムおよびスキャンデータの生産方法 |
| JP6939236B2 (ja) * | 2017-08-15 | 2021-09-22 | 富士フイルムビジネスイノベーション株式会社 | 画像形成装置 |
| JP7109320B2 (ja) * | 2018-09-19 | 2022-07-29 | 株式会社Screenホールディングス | 印刷装置及びそのズレ量算出方法 |
| JP7211206B2 (ja) * | 2019-03-28 | 2023-01-24 | ブラザー工業株式会社 | 画像形成装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0885235A (ja) * | 1994-09-16 | 1996-04-02 | Canon Inc | 画像形成装置 |
| JPH11180013A (ja) * | 1997-12-19 | 1999-07-06 | Canon Aptex Inc | 記録試験装置 |
| JP2003170645A (ja) * | 2001-12-06 | 2003-06-17 | Olympus Optical Co Ltd | 記録用紙及び画像記録装置 |
| JP4590841B2 (ja) | 2003-08-07 | 2010-12-01 | 富士ゼロックス株式会社 | 画像形成装置 |
| JP4756842B2 (ja) * | 2004-09-30 | 2011-08-24 | キヤノン株式会社 | プリント位置調整方法およびプリント装置 |
| JP2006255976A (ja) * | 2005-03-15 | 2006-09-28 | Fuji Xerox Co Ltd | 画像形成装置及びプリントヘッドの制御方法 |
| JP4770256B2 (ja) * | 2005-04-28 | 2011-09-14 | コニカミノルタホールディングス株式会社 | 記録ヘッドの傾き補正方法 |
| JP2006305952A (ja) * | 2005-04-28 | 2006-11-09 | Seiko Epson Corp | 印刷装置、コンピュータプログラム、印刷方法、及び、媒体 |
| JP4888239B2 (ja) * | 2007-06-13 | 2012-02-29 | セイコーエプソン株式会社 | 液体吐出装置 |
| JP4883702B2 (ja) * | 2007-07-18 | 2012-02-22 | 富士フイルム株式会社 | ドット計測方法及び装置、プログラム、並びに画像形成装置 |
| JP5338291B2 (ja) * | 2008-12-12 | 2013-11-13 | コニカミノルタ株式会社 | 画像形成装置 |
| US8721026B2 (en) * | 2010-05-17 | 2014-05-13 | Xerox Corporation | Method for identifying and verifying dash structures as candidates for test patterns and replacement patterns in an inkjet printer |
-
2013
- 2013-03-15 JP JP2013053226A patent/JP5894098B2/ja not_active Expired - Fee Related
-
2014
- 2014-02-24 WO PCT/JP2014/054370 patent/WO2014141862A1/ja active Application Filing
-
2015
- 2015-08-12 US US14/824,944 patent/US9370954B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20150343820A1 (en) | 2015-12-03 |
| WO2014141862A1 (ja) | 2014-09-18 |
| US9370954B2 (en) | 2016-06-21 |
| JP2014177057A (ja) | 2014-09-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8585174B2 (en) | Inkjet printing apparatus and printing method of inkjet printing apparatus | |
| JP5477954B2 (ja) | 画像記録装置及び画像記録装置のヘッド調整方法 | |
| JP5807964B2 (ja) | 画像記録装置及び方法 | |
| JP5473704B2 (ja) | テストパターン印刷方法及びインクジェット記録装置 | |
| JP5158992B2 (ja) | 不良記録素子の検出装置及び方法、画像形成装置 | |
| US8851619B2 (en) | Apparatus for optimizing non-ejection correction parameter of ink-jet head, and ink-jet printer | |
| JP5894098B2 (ja) | 位置ずれ量測定方法及び画像記録装置 | |
| JP5940818B2 (ja) | 補正値取得方法及び画像記録装置 | |
| JP2013169760A (ja) | インクジェット記録装置及びその画像記録方法 | |
| US9227394B2 (en) | Head adjustment method, head-driving device and image-forming device | |
| JP5952704B2 (ja) | ヘッド駆動方法、ヘッド駆動装置およびインクジェット記録装置 | |
| JP2013184458A (ja) | 画像記録装置及び方法 | |
| JP2014136319A (ja) | 記録ヘッドの位置ズレ検知方法及び画像記録装置 | |
| US9895880B2 (en) | Method for adjusting recording head, and image forming apparatus | |
| JP5393560B2 (ja) | インクジェット描画装置及びその設計方法並びに描画品質改善方法 | |
| JP2012250472A (ja) | インクジェット記録ヘッドの状態監視装置及びインクジェット記録装置 | |
| JP5301483B2 (ja) | 記録ヘッド調整方法及び画像記録装置 | |
| JP2012066457A (ja) | 画像形成装置、補正値算出装置、濃度測定用テストチャート、及び補正値算出方法 | |
| JP5436369B2 (ja) | 記録装置及び記録方法 | |
| JP5649460B2 (ja) | 記録ヘッド、画像形成装置及び液体吐出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150403 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150421 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160223 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160225 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5894098 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |