JP5866429B2 - 電気機器を制御する方法及び装置 - Google Patents
電気機器を制御する方法及び装置 Download PDFInfo
- Publication number
- JP5866429B2 JP5866429B2 JP2014501714A JP2014501714A JP5866429B2 JP 5866429 B2 JP5866429 B2 JP 5866429B2 JP 2014501714 A JP2014501714 A JP 2014501714A JP 2014501714 A JP2014501714 A JP 2014501714A JP 5866429 B2 JP5866429 B2 JP 5866429B2
- Authority
- JP
- Japan
- Prior art keywords
- angle
- vector
- electromotive force
- observer
- current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/34—Modelling or simulation for control purposes
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/13—Observer control, e.g. using Luenberger observers or Kalman filters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P1/00—Arrangements for starting electric motors or dynamo-electric converters
- H02P1/02—Details
- H02P1/04—Means for controlling progress of starting sequence in dependence upon time or upon current, speed, or other motor parameter
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/0003—Control strategies in general, e.g. linear type, e.g. P, PI, PID, using robust control
- H02P21/0021—Control strategies in general, e.g. linear type, e.g. P, PI, PID, using robust control using different modes of control depending on a parameter, e.g. the speed
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/18—Estimation of position or speed
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/03—Arrangements or methods for the control of AC motors characterised by a control method other than vector control specially adapted for very low speeds
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
- H02P6/182—Circuit arrangements for detecting position without separate position detecting elements using back-emf in windings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/20—Arrangements for starting
- H02P6/21—Open loop start
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/12—Observer control, e.g. using Luenberger observers or Kalman filters
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S388/00—Electricity: motor control systems
- Y10S388/923—Specific feedback condition or device
- Y10S388/9281—Counter or back emf, CEMF
Description
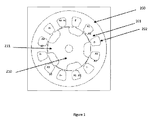
201,211,224,226 歯
202,232,242 スロット
210,222,233,243 回転子
223 極
225 コイル
400 インバータ
401 モータ
402 開ループ制御モジュール
404 オブザーバブロック
405 閉ループ制御モジュール
406 信号
407 制御スイッチ
Claims (19)
- 電気機器を駆動するために開ループ制御が使用されている間動作するように構成され、回転起電力ベクトルと、電気機器を制御するように構成されているインバータによって発生する電流励起ベクトルとの間の角度に関連する信号E_I_angleを出力するように構成されている、電気機器を制御する制御システムで使用するオブザーバであって、
前記オブザーバは、和項を有する反復計算によって前記角度を決定し、前記和項は推定される起電力位置ベクトルに対する回転起電力ベクトルの直交成分の変化を合計し、E_I_angleが以下の式によって決定され、

- k i はE s_real に対して反比例する、請求項1に記載のオブザーバ。
- 請求項1又は請求項2に記載のオブザーバを備える電気機器の制御システムであって、
前記オブザーバによって出力される信号E_I_angleと前記電流励起ベクトルCurrent position を使用して以下の式のように前記回転起電力位置ベクトルの推定角度位置EMF position を更新する、電気機器の制御システム。
- 前記オブザーバは、出力信号がプルアウト状態に近い状態を示す閾値よりも低い値に達したとき、閉ループ制御に移行する時間を決定するために、前記出力信号E_I_angleを使用するように構成されている、請求項3に記載の制御システム。
- 前記オブザーバは、開ループ駆動されている電気機器のトルク監視システムとして、前記出力信号E_I_angleを使用するように構成されており、前記回転起電力ベクトルと前記電流励起ベクトルとの間が大きな角度であることより示される、負荷トルクが比較的低いレベルの間は、前記オブザーバは前記電流励起ベクトルの大きさを減少するように前記インバータに指示するように構成されている、請求項3又は請求項4に記載の制御システム。
- 前記オブザーバは、開ループ駆動されている電気機器のトルク監視システムとして、前記出力信号E_I_angleを使用するように構成されており、前記回転起電力ベクトルと前記電流励起ベクトルとの間が小さな角度であることより示される、負荷トルクが比較的高いレベルの間は、前記オブザーバは前記電流励起ベクトルの大きさを増加するように前記インバータに指示するように構成されている、請求項3から請求項5のいずれか1項に記載の制御システム。
- 前記オブザーバは、開ループ駆動されている電気機器のトルク監視システムとして、前記出力信号E_I_angleを使用するように構成されており、前記回転起電力ベクトルと前記電流励起ベクトルとの間が大きな角度であることより示される、負荷トルクが比較的低いレベルの間は、前記オブザーバは前記電流励起ベクトルの大きさを、前記オブザーバの出力信号E_I_angleがプルアウト状態に近い状態を示す閾値より低い値に達するまで徐々に減少するように前記インバータに指示し、閉ループ制御への移行が円滑に開始され得るように構成されている請求項3から請求項6のいずれか1項に記載の制御システム。
- 同期電動機を制御するように構成されている、請求項3から請求項7のいずれか1項に記載の制御システム。
- 請求項3から請求項8のいずれか1項に記載の制御システムを備える電気機器。
- 電気機器を駆動するために開ループ制御が使用されている間オブザーバを動作させ、前記オブザーバの出力は、回転起電力ベクトルと、電気機器を制御するように構成されているインバータによって発生する電流励起ベクトルとの間の角度に関連する信号E_I_angleであって、
前記オブザーバで和項を有する反復計算によって前記角度を決定し、前記和項は推定される起電力位置ベクトルに対する回転起電力ベクトルの直交成分の変化を合計するものであり、
前記E_I_angleを以下の式によって決定し、
前記オブザーバによって出力される角度E_I_angleと前記電流励起ベクトルCurrent position を使用して以下のように前記回転起電力位置ベクトルEMF position の推定角度位置を更新する、電気機器を制御する方法。
- 回転起電力ベクトルと、前記電気機器を制御するために発生する電流励起ベクトルとの間の角度E_I_angleを決定し、
1以上の制御信号を前記電気機器に印加し、前記制御信号はE_I_angleに依存して決定されるものであり、
前記E_I_angle及び前記電流励起ベクトルCurrent position に基づいて前記起電力位置ベクトルEMF position を以下の式のように更新し、
前記E_I_angleを以下の式によって決定し、
- kiはE s_real に対して反比例する、請求項10又は請求項11に記載の方法。
- kpがEs_realに反比例する、請求項10から請求項12のいずれか1項に記載の方法。
- 前記電気機器に対する1以上の制御信号の印加は、開ループ制御構造から閉ループセンサーレス制御構造への移行を含む、請求項10から請求項13のいずれか1項に記載の方法。
- E_I_angleの大きさがプルアウト値で表される閾値以下となったとき、及び最大電流励起が前記電気機器に印加されたとき、開ループ制御構造から閉ループセンサーレス制御構造へ移行する、請求項14に記載の方法。
- E_I_angleが負及び荷重角度が90であるプルアウト値で表される閾値より大きい場合、前記電気機器に対する1以上の制御信号の印加は、前記電気機器の電流励起の減少を含む、請求項10から請求項15のいずれか1項に記載の方法。
- E_I_angleの大きさが荷重角度が90であるプルアウト値で表される閾値より小さく、さらに前記電気機器に対する前記最大励起電流がまだ印加されていない場合、前記電気機器に対して1以上の制御信号の印加は、前記電気機器の電流励起の増加を含む、請求項10から請求項16のいずれか1項に記載の方法。
- 前記励起電流の増加又は減少があらかじめ決められた増分値による、請求項16又は請求項17に記載の方法。
- コンピュータで読みこまれるときに、請求項10から請求項18のいずれか1項に記載の方法を実行するように構成されたコンピュータプログラムを備える非一時的なコンピュータが読み取り可能な媒体。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB1105093.7A GB2489434A (en) | 2011-03-25 | 2011-03-25 | Controlling an electrical machine with an observer |
| GB1105093.7 | 2011-03-25 | ||
| PCT/GB2012/050658 WO2012131344A2 (en) | 2011-03-25 | 2012-03-26 | Method and apparatus for controlling an electrical machine |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014513911A JP2014513911A (ja) | 2014-06-05 |
| JP2014513911A5 JP2014513911A5 (ja) | 2015-05-28 |
| JP5866429B2 true JP5866429B2 (ja) | 2016-02-17 |
Family
ID=44067411
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014501714A Expired - Fee Related JP5866429B2 (ja) | 2011-03-25 | 2012-03-26 | 電気機器を制御する方法及び装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8766571B2 (ja) |
| EP (1) | EP2689529B1 (ja) |
| JP (1) | JP5866429B2 (ja) |
| KR (1) | KR101781524B1 (ja) |
| GB (1) | GB2489434A (ja) |
| WO (1) | WO2012131344A2 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2465379A (en) * | 2008-11-17 | 2010-05-19 | Technelec Ltd | Controller for electrical machines |
| JP5904803B2 (ja) * | 2012-01-24 | 2016-04-20 | キヤノン株式会社 | 画像形成装置 |
| CN103248287A (zh) * | 2013-05-15 | 2013-08-14 | 无锡艾柯威科技有限公司 | 一种无位置传感器直接转矩电机控制系统的切换方法 |
| GB2527101B (en) * | 2014-06-12 | 2016-10-19 | Jaguar Land Rover Ltd | A switched reluctance motor with reduced torque ripple |
| DE102015208710A1 (de) * | 2015-05-11 | 2016-11-17 | Baumüller Nürnberg GmbH | Verfahren zum Betrieb einer elektrischen Maschine und Antrieb |
| KR101709854B1 (ko) | 2015-05-28 | 2017-02-23 | 삼성전기주식회사 | 액츄에이터 구동 장치, 카메라 모듈, 전자 장치 및 액츄에이터 구동 제어 방법 |
| EP3168980B1 (en) * | 2015-08-04 | 2022-08-24 | Mitsubishi Electric Corporation | Synchronous motor control device, compressor drive device, air-conditioner, and method for controlling synchronous motor |
| US10133255B2 (en) * | 2016-07-08 | 2018-11-20 | Ricoh Compant, Ltd. | Motor controller, motor driver, and motor driving system |
| JP6767213B2 (ja) | 2016-09-05 | 2020-10-14 | 東芝インフラシステムズ株式会社 | インバータ制御装置および電動機駆動システム |
| EP3382887A1 (fr) * | 2017-03-27 | 2018-10-03 | Valeo Japan Co., Ltd. | Procede de demarrage pour une machine synchrone, dispositif de commande, machine synchrone et compresseur associes |
| CN110235068B (zh) * | 2017-05-18 | 2022-04-19 | 深圳市海浦蒙特科技有限公司 | 机床主轴的定位控制方法及系统 |
| EP3826170A1 (en) * | 2019-11-21 | 2021-05-26 | Melexis Technologies NV | Stall detection in sine wave driven motors |
| CN111327234B (zh) * | 2020-02-28 | 2021-07-23 | 北京航空航天大学 | 永磁容错电机系统低速段无位置传感器控制方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60261386A (ja) * | 1984-06-05 | 1985-12-24 | Toshiba Mach Co Ltd | 交流電動機の速度制御装置 |
| JP3454210B2 (ja) * | 1999-11-30 | 2003-10-06 | 株式会社日立製作所 | 同期モータの位置センサレス制御方法 |
| US20040007995A1 (en) * | 2002-07-11 | 2004-01-15 | Visteon Global Technologies, Inc. | Vector control system for permanent magnet sychronous machines using an open-loop parameter observer |
| JP4674516B2 (ja) * | 2005-09-27 | 2011-04-20 | 株式会社デンソー | 同期モータの磁極位置推定方法 |
| KR101258087B1 (ko) | 2006-05-03 | 2013-04-25 | 엘지전자 주식회사 | 모터의 고속운전 제어 장치 및 그 방법 |
| ES2385050T3 (es) * | 2006-08-31 | 2012-07-17 | Mitsubishi Electric Corporation | Dispositivo de accionamiento de motor eléctrico, y dispositivo de accionamiento de compresor |
| DE502007003311D1 (de) * | 2007-07-26 | 2010-05-12 | Baumueller Nuernberg Gmbh | System zur Lage- und Geschwindigkeitsermittlung bei einem Permanentmagnet-Läufer einer elektrischen Maschine |
| JP5130031B2 (ja) * | 2007-12-10 | 2013-01-30 | 株式会社日立製作所 | 永久磁石モータの位置センサレス制御装置 |
| GB2465379A (en) * | 2008-11-17 | 2010-05-19 | Technelec Ltd | Controller for electrical machines |
| GB2489412A (en) * | 2011-03-25 | 2012-10-03 | Technelec Ltd | Low speed control of synchronous machines |
-
2011
- 2011-03-25 GB GB1105093.7A patent/GB2489434A/en not_active Withdrawn
-
2012
- 2012-03-26 JP JP2014501714A patent/JP5866429B2/ja not_active Expired - Fee Related
- 2012-03-26 EP EP12717808.5A patent/EP2689529B1/en not_active Not-in-force
- 2012-03-26 US US14/007,321 patent/US8766571B2/en not_active Expired - Fee Related
- 2012-03-26 KR KR1020137027609A patent/KR101781524B1/ko active IP Right Grant
- 2012-03-26 WO PCT/GB2012/050658 patent/WO2012131344A2/en active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014513911A (ja) | 2014-06-05 |
| KR101781524B1 (ko) | 2017-09-26 |
| WO2012131344A3 (en) | 2013-08-01 |
| EP2689529A2 (en) | 2014-01-29 |
| KR20140024331A (ko) | 2014-02-28 |
| GB201105093D0 (en) | 2011-05-11 |
| US8766571B2 (en) | 2014-07-01 |
| WO2012131344A2 (en) | 2012-10-04 |
| GB2489434A (en) | 2012-10-03 |
| EP2689529B1 (en) | 2017-10-25 |
| US20140084821A1 (en) | 2014-03-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5866429B2 (ja) | 電気機器を制御する方法及び装置 | |
| JP3971741B2 (ja) | 磁極位置検出装置 | |
| JP4928855B2 (ja) | 同期機のセンサレス制御装置 | |
| JP5329005B2 (ja) | 永久磁石式回転電機 | |
| JP2012509056A (ja) | 電力機器用制御装置 | |
| US9590541B2 (en) | Method and apparatus for control of electrical machines | |
| EP2493066B1 (en) | Method and apparatus for estimating rotor angle and rotor speed of synchronous reluctance motor at start-up | |
| EP2819298A2 (en) | Position Sensorless Permanent Magnet Electrical Machine | |
| JP2008220096A (ja) | 同期電動機のセンサレス制御装置 | |
| CN102291070A (zh) | 双凸极电机无位置传感器控制的起动方法 | |
| EP2840701B1 (en) | Sensing PM electrical machine position | |
| JP4211133B2 (ja) | 永久磁石式同期電動機のセンサレス制御システム | |
| WO2007114058A1 (ja) | 永久磁石同期モータの磁極位置検出方法 | |
| RU2414047C1 (ru) | Способ и управляющее устройство для управления электродвигателем с внутренними постоянными магнитами | |
| CN102804590B (zh) | 用于补偿永久励磁的马达中负载影响的方法和装置 | |
| JP2014110708A5 (ja) | ||
| EP3654520B1 (en) | Motor driving apparatus | |
| JP6440355B2 (ja) | ロータの回転数をステータの回転磁界と同期させるための方法と装置 | |
| EP3168981A1 (en) | Rotor position detection apparatus and motor control apparatus | |
| JP2007282319A (ja) | 同期モータ制御装置 | |
| KR101677598B1 (ko) | 저소음을 위한 스위치드 릴럭턴스 모터의 구동 제어 장치 및 구동 제어 방법 | |
| JP2017055637A (ja) | モータの巻き線に生じる逆起電圧に基づきモータを制御するモータ制御装置 | |
| EP3783794B1 (en) | Method and apparatus for detecting rotor magnetic pole position in a single-phase bldc motor | |
| KR20220084574A (ko) | 모터 제어 장치 및 모터 제어 방법 | |
| Kim et al. | An improved back-EMF based initial rotor position estimation for IPMSM |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150304 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150401 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20150401 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150403 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20150414 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150731 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150804 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20151102 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151113 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151208 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160104 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5866429 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |