JP5846292B2 - 発情報知方法、発情報知装置、および発情報知プログラム - Google Patents
発情報知方法、発情報知装置、および発情報知プログラム Download PDFInfo
- Publication number
- JP5846292B2 JP5846292B2 JP2014507262A JP2014507262A JP5846292B2 JP 5846292 B2 JP5846292 B2 JP 5846292B2 JP 2014507262 A JP2014507262 A JP 2014507262A JP 2014507262 A JP2014507262 A JP 2014507262A JP 5846292 B2 JP5846292 B2 JP 5846292B2
- Authority
- JP
- Japan
- Prior art keywords
- communication device
- information
- livestock
- gps
- position information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K11/00—Marking of animals
- A01K11/006—Automatic identification systems for animals, e.g. electronic devices, transponders for animals
- A01K11/008—Automatic identification systems for animals, e.g. electronic devices, transponders for animals incorporating global positioning system [GPS]
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K29/00—Other apparatus for animal husbandry
- A01K29/005—Monitoring or measuring activity
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61D—VETERINARY INSTRUMENTS, IMPLEMENTS, TOOLS, OR METHODS
- A61D17/00—Devices for indicating trouble during labour of animals ; Methods or instruments for detecting pregnancy-related states of animals
- A61D17/002—Devices for indicating trouble during labour of animals ; Methods or instruments for detecting pregnancy-related states of animals for detecting period of heat of animals, i.e. for detecting oestrus
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2270/00—Control; Monitoring or safety arrangements
- F04C2270/04—Force
- F04C2270/042—Force radial
- F04C2270/0421—Controlled or regulated
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Environmental Sciences (AREA)
- Animal Husbandry (AREA)
- Health & Medical Sciences (AREA)
- Biodiversity & Conservation Biology (AREA)
- Biophysics (AREA)
- Engineering & Computer Science (AREA)
- Veterinary Medicine (AREA)
- Zoology (AREA)
- Pregnancy & Childbirth (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Radar, Positioning & Navigation (AREA)
- Birds (AREA)
- Animal Behavior & Ethology (AREA)
- Wood Science & Technology (AREA)
- Mobile Radio Communication Systems (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Description
本発明は、発情報知方法、発情報知装置、および発情報知プログラムに関する。
従来、牛などの家畜を放牧して飼育する場合、畜産農家の作業者が定期的に放牧地に赴いて、家畜に異常がないかをチェックしている。例えば、放牧中のメス牛の発情の管理は、作業者がほぼ毎日、放牧地に赴き、発情行動を行っているメス牛の有無を実際に目視で確認したりする。
また、家畜を管理するための技術として、例えば、特定の家畜を見つけ出すために、家畜に巻き付けるベルトに発光部を取り付け、発光部を制御する技術が提案されている(例えば、下記特許文献1参照。)。また、乳牛の歩数を検出して、歩数が所定数増加した場合に発情を特定する技術が提案されている(例えば、下記特許文献2参照。)。
また、群れの中のリーダとなる家畜にGPS(Global Positioning System)受信機が組み込まれた公衆無線通信が可能な主端末を取り付け、群れの中の他の家畜に主端末と近距離通信が可能な端末を取り付け、群れの中の他の家畜を追跡可能にした技術が提案されている(例えば、下記特許文献3。)。
しかしながら、従来技術によれば、家畜を追跡するためにGPS機能を有する装置を用いる場合、GPS機能によって繰り返し行われる位置情報の送信処理などにより電池の短寿命化を招き、電池交換などの作業者の作業負荷が増大するという問題がある。システムが放牧地内に備えられた中継機を通じて、家畜のそれぞれに設置された通信機を通じて、家畜の歩数を収集する形態も存在しているが、このような場合であっても、中継機は通信が可能なエリアを有しており、中継機のみの情報ではそのエリアに存在するという情報、すなわち、曖昧な位置情報しか得られない。
本発明は、上述した従来技術による問題点を解消するため、電池の消耗を必要最低限に抑えるとともに、家畜のより細かい位置検出を行うことができる発情報知方法、発情報知装置、および発情報知プログラムを提供することを目的とする。
本発明の一側面によれば、それぞれが群れに属する複数の家畜にそれぞれ装着された歩数計測手段からの歩数計測結果に基づき、発情の判定を行う発情報知方法、発情報知装置、および発情報知プログラムであって、前記複数の家畜それぞれの前記歩数計測結果を取得し、前記歩数計測結果に基づいて、前記複数の家畜それぞれについて発情の有無を判定し、前記複数の家畜のうち特定の家畜が発情有りと判定した場合、前記特定の家畜が属する前記群れの情報、および、前記群れに属するいずれかの前記家畜に装着された位置情報を出力可能な位置情報通信機に関する情報に基づき、前記特定の家畜に対応する特定の位置情報通信機を検索し、検索した前記特定の位置情報通信機に、前記特定の位置情報通信機が有する自機の位置情報を取得する機能の起動指示を送信し、前記特定の位置情報通信機から受信した位置情報を出力する発情報知方法、発情報知装置、および発情報知プログラムが提案される。
本発明の一側面によれば、電池の消耗を必要最低限に抑えるとともに、家畜のより細かい位置検出を行うことができるという効果を奏する。
以下に添付図面を参照して、本発明にかかる発情報知方法、発情報知装置、および発情報知プログラムの実施の形態を詳細に説明する。
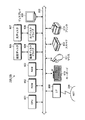
図1は、本実施の形態にかかる発情報知方法の一実施例を示す説明図である。図1において、作業者Wが管理する農場Fの敷地内では家畜Aが飼育されている。ここで、作業者Wとは、畜産業に従事する者である。農場Fとは、家畜Aを放牧する放牧地などを有する施設である。家畜Aとは、農場Fの敷地内、例えば農場Fの放牧地内を移動できる動物である。例えば、家畜Aとしては、牛や豚や馬など、歩行により移動する動物を挙げることができる。また、家畜A(A1〜An)は、n頭の群れを成して移動する動物である。
家畜A1〜Anには、それぞれ通信機101が装着されている。ここで、通信機101は、家畜Aの歩数を計測する可搬型のコンピュータである。例えば、家畜Aは、歩行の際に、まず、右足を移動方向の地面に向けて送り出す。右足が地面に着地すると、今度は左足を移動方向の地面に向けて送り出す。そして、家畜Aは、左足が地面に着地すると、再び、右足を送り出すといったような動作を繰り返す。すなわち、家畜Aの歩数は、家畜Aが右足または左足を移動方向の地面に向けて送り出した回数とすることができる。
例えば、家畜Aの状態変化、例えば、発情、疾病、出産、天敵の出現などにより、通常状態とは異なる異常状態になると、家畜Aの単位時間あたりの歩数は、通常状態に比べて、増加したり減少したりする。ここで、発情とは、家畜Aが生殖活動にともなう興奮状態をいう。疾病とは、家畜Aの状態が不調または不都合が生じた状態をいう。
家畜Aに異常状態が生じた場合には家畜Aの歩数が変化するということを利用し、家畜Aの歩数を計測しておくことにより、作業者Wは、歩数の計測結果から家畜Aの状態に変化が生じていることを知ることができる。
また、群れを形成する家畜A1〜Anのうち、特定の家畜Aには、通信機101とともに、自機の位置情報を取得する機能を有するGPS通信機107が装着されている。図1の例では、家畜AnにGPS通信機107が装着されている。なお、群れを形成している家畜A1〜Anは同様に移動をするために、特定の家畜Anは群れに1頭であることが好ましく、予備的の家畜Aを含めて2頭存在すれば十分である。以下、GPS通信機107の位置情報を「GPS情報」という。GPS情報(例えば、GPS情報140)は、地図上の一点を特定するための情報であり、例えば、緯度および経度の情報である。
通信機101およびGPS通信機107は、農場Fの敷地内に設けられた複数の中継機102と通信可能になっている。中継機102は、通信機101、GPS通信機107および後述の発情報知装置104と通信可能なコンピュータである。複数の中継機102は、農場F内に、それぞれ異なる位置に設置されている。通信機101は、通信可能ないずれかの中継機102に、計測結果を表す計測結果情報110を送信する。
通信機101およびGPS通信機107は、例えば、図1において符号102aで例示する中継機102aの通信エリア103a内に位置していれば、中継機102aと通信可能である。また、通信機101およびGPS通信機107は、図1において符号102bで例示する中継機102bの通信エリア103b内に位置していれば、中継機102bと通信可能である。通信エリア103は、例えば半径150mの範囲である。
中継機102は、通信機101から計測結果情報110を受信した場合、または、GPS通信機107からGPS通信機107のGPS情報140を受信した場合、受信した計測結果情報110またはGPS情報140を発情報知装置104に送信する。
発情報知装置104は、複数の中継機102と接続され、いずれかの中継機102を介して、通信機101の計測結果情報110およびGPS通信機107のGPS情報140を受信可能なコンピュータである。また、発情報知装置104は、クライアント装置105と所定の回線を介して通信接続することが可能になっている。
クライアント装置105は、ディスプレイ106を有し、発情報知装置104と通信可能な可搬型のコンピュータである。クライアント装置105は、発情報知装置104から情報を受信した場合に、受信した情報に基づく画像をディスプレイ106に表示する。
ここで、放牧中の家畜Aの異常状態を見つける手法として、例えばメス牛の発情を見つける手法について例示する。例えば、作業者Wが、定期的に放牧地に赴いて、発情しているメス牛の有無を実際に目視によって確かめる手法がある。この手法では、一辺が数百メートルから数キロに及ぶような広大な農場F内を作業者Wが探し回ることになるため、時間がかかるだけでなく、作業者Wの手間となり、結果として人件費が高くなってしまう。そのため、作業者Wによっては、放牧中には種付けをあきらめてしまうことがあるが、発情したメス牛に種付けを行わないこと、すなわち、受胎する可能性が高いときに種付けしないことは、経済的な損失となってしまう。
また、作業者Wによっては、メス牛を放牧する際に種牛も放牧し、自然交配を行わせることもある。ところが、種牛による自然交配は、より良い子孫を残すという現在の畜産経営の観点から好ましいものではなく、また、オス牛は獰猛であるため、慣れた作業者Wしかオス牛を扱うことができず有効なものではない。
また、メス牛が発情したときには歩数が増加するという性質を利用し、メス牛に歩数計を装着させ、歩数計が所定の閾値を超えた場合に、放牧地の所定位置に配置された通信装置からアラームを発信して、通信装置の位置を作業者Wに知らせる手法がある。ところが、この手法では、アラームを受信した際に作業者Wが牛舎の清掃等、他の作業を行っていることが往々にしてあり、このような場合には、すぐに該当するメス牛を見つけに行くことができない。アラームを受信してからしばらくして、作業者Wがアラームを発信した通信装置の位置に赴いたとしても、家畜Aは移動を繰り返しているため、発情したメス牛を見つけることができず、結局、作業者Wが探し回る必要があり、作業者Wの手間となる。
また、発情したメス牛の位置を把握するために、各メス牛にGPS機能を有した通信装置を装着する手法もある。ところが、各メス牛にGPS機能を有した通信装置を装着するにはコストがかかり、また、GPS機能は常時電気信号を発信するものであるため、駆動電源となる電池の消耗が早く、頻繁に電池交換またはGPS機能を有した通信装置自体の交換が必要となる。したがって、この手法は、初期費用がかかるだけでなく、電池または装置の交換において作業者Wの手間となるため、実際の運用には適していない。
そこで、本実施の形態では、歩数変動から発情した家畜Aを発見した場合に、家畜Aが属する群れの中にあらかじめ定めた特定の家畜Anに装着されたGPS通信機107を起動することにより、GPS通信機107の電池の消費電力を抑え家畜Aの追跡にかかる作業負荷を軽減する。
以下、実施の形態の発情報知方法の一実施例について説明する。なお、本実施の形態では一例として、家畜Aの異常状態として発情を例にして説明する。また、本実施の形態において、家畜Aをメス牛として説明する。メス牛は発情すると、発情していないときに比べて、単位時間あたりの歩数が増加する性質があり、このようなメス牛の性質を利用している。
(1)通信機101は、家畜Aの歩数を計測して、通信エリア103に位置する中継機102に所定の送信間隔で計測結果情報110を送信する。所定の送信間隔とは、例えば1時間である。
(2)中継機102は、通信機101から計測結果情報110を受信すると、受信した計測結果情報110と自機の中継機識別情報(中継機ID)120を発情報知装置104に送信する。
(3)発情報知装置104は、中継機102から計測結果情報110を受信すると、受信した計測結果情報110に基づいて、家畜Aの歩数が所定の条件を満たすか否かを判定する。例えば、発情報知装置104は、家畜Aの単位時間あたりの歩数が閾値Th以上であると判定した場合、すなわち家畜Aに発情の兆候がある場合、家畜Aの歩数が所定の条件を満たしたものと判定する。
発情報知装置104は、群れを形成する家畜Aの各々に装着された通信機101と、群れを形成する家畜Aのいずれかの家畜Anに装着されたGPS通信機107とを対応付けて群れごとに記憶している。
発情報知装置104は、家畜Aの歩数が所定の条件を満たす場合、通信機101と対応付けられているGPS通信機107を検索する。言い換えれば、家畜Aの歩数が所定の条件を満たす場合、通信機101が装着された家畜A(例えば家畜A1)と同じ群れである家畜群の中から、GPS通信機107が装着された家畜Anを特定することを可能にしている。
(4)発情報知装置104は、家畜Aが位置する中継機102を介して、特定の家畜Anに備えられたGPS通信機107へ起動指示情報130を送信する。
(5)GPS通信機107は、電池を有している。通常時は電池の電源がOFFになっている。電池には、GPS情報140を取得するためのメイン電源用のメイン電池と、発情報知装置104から起動指示130を受信するためのサブ電源用のサブ電池とがある。本実施の形態において、電池とは、メイン電源用の電池をいう。メイン電池を利用したGPS情報の取得時の方が、サブ電池を利用した起動指示の受信時よりも電池の消費量は大きく、継続時間は短い。なお、サブ電源は、常時ONになっている。GPS通信機107は、中継機102を介して発情報知装置104から起動指示情報130を受信すると、メイン電源をONにする。
(6)GPS通信機107は、GPS情報140を取得し、取得したGPS情報140を、中継機102を介して発情報知装置104へ送信する。この取得頻度は、例えば20秒ごとである。
(7)発情報知装置104は、中継機102を介してGPS通信機107から受信した、GPS情報140をクライアント装置105へ送信する。クライアント装置105は、発情報知装置104からGPS情報140を受信すると、ディスプレイ106にGPS情報140に基づく画像を表示する。具体的には、クライアント装置105は、発情した家畜Aが属する群れの位置を表示する。
このように、実施の形態の発情報知方法によれば、家畜Aの歩数変動から発情の兆候を示す家畜Aを発見した場合、家畜Aが属する群れを定め、その群れの中の特定の家畜Anに装着されたGPS通信機を起動させることができる。これにより、GPS通信機107のメイン電源を常時起動させることなく、メイン電源用の電池の消費電力を抑えることができる。すなわち、家畜Aの追跡が不要の場合には、細かい位置検出は行わず、追跡が必要となったときのみにおいて、細かい位置検出を頻繁に行うことにより、GPS通信機107の電池の消耗を必要最低限に抑えることができる。したがって、GPS通信機107や、GPS通信機107の電池の交換サイクルを長期化することができ、家畜Aの追跡にかかる作業負荷を軽減することができる。
(発情報知システム200のシステム構成例)
つぎに、発情報知システム200のシステム構成例について説明する。図2は、発情報知システム200のシステム構成例を示す説明図である。図2において、発情報知システム200は、複数の通信機101と、複数の中継機102と、発情報知装置104と、を含む。
つぎに、発情報知システム200のシステム構成例について説明する。図2は、発情報知システム200のシステム構成例を示す説明図である。図2において、発情報知システム200は、複数の通信機101と、複数の中継機102と、発情報知装置104と、を含む。
発情報知システム200において、通信機101および中継機102は、無線通信ネットワーク210を介して接続されている。通信機101および中継機102は、自機を中心とした所定範囲、例えば自機を中心とした半径100mの範囲を、無線通信ネットワーク210による通信が可能な通信エリアとして有している。通信機101および中継機102は、通信可能な位置関係であった場合に無線通信ネットワーク210により接続される。例えば、無線通信ネットワーク210には、50メートルから200メートルの範囲を通信可能とする無線通信を適用することができる。
また、中継機102、発情報知装置104およびクライアント装置105は、ネットワーク220を介して接続されている。例えば、ネットワーク220は、インターネット、LAN(Local Area Network)、WAN(Wide Area Network)などである。
通信機101は、計測結果情報テーブル201などを有しており、農場Fで飼育された各々の家畜Aに装着された可搬型のコンピュータである。通信機101は、自機が装着された家畜Aの歩数を計測する計測機能、無線通信ネットワーク210による通信機能を有している。例えば、通信機101は、無線通信ネットワーク210による通信機能が付加された歩数計などを適用することができる。なお、計測結果情報テーブル201の記憶内容については図7を用いて後述する。
中継機102は、農場Fの敷地内に設置され、無線通信ネットワーク210による通信機能およびネットワーク220による通信機能を有するコンピュータである。複数の中継機102は、それぞれ異なる設置位置に設置されている。
発情報知装置104は、歩数DB202、群れ管理DB203、GPS通信機DB204などを有しており、ネットワーク220による通信機能を有するコンピュータである。例えば、発情報知装置104には、クラウドコンピューティングシステムに含まれるサーバや、農場Fの経営者や作業者Wによって使用されるPC(パーソナル・コンピュータ)、ノートPCなどを適用することができる。なお、歩数DB202、群れ管理DB203、GPS通信機DB204の記憶内容については図8〜図10を用いて後述する。
クライアント装置105は、ネットワーク220による通信機能を有するコンピュータである。例えば、クライアント装置105には、農場Fの作業者Wによって使用されるPCやノートPC、携帯電話、スマートフォンなどを適用することができる。
(通信機101のハードウェア構成例)
つぎに、通信機101のハードウェア構成例について説明する。図3は、通信機101のハードウェア構成例を示すブロック図である。図3において、通信機101は、CPU(Central Processing Unit)301と、メモリ302と、I/F(Interface)303と、センサ304と、タイマ305とを有する。また、各構成部はバス300によってそれぞれ接続されている。
つぎに、通信機101のハードウェア構成例について説明する。図3は、通信機101のハードウェア構成例を示すブロック図である。図3において、通信機101は、CPU(Central Processing Unit)301と、メモリ302と、I/F(Interface)303と、センサ304と、タイマ305とを有する。また、各構成部はバス300によってそれぞれ接続されている。
ここで、CPU301は、通信機101の全体の制御を司る。メモリ302は、ROM(Read Only Memory)、RAM(Random Access Memory)およびフラッシュROMなどを含む。ROMおよびフラッシュROMは、例えば、ブートプログラムなどの各種プログラムを記憶する。RAMは、CPU301のワークエリアとして使用される。
I/F303は、通信回線を通じて無線通信ネットワーク210に接続され、無線通信ネットワーク210を介して他の装置(例えば中継機102)に接続される。そして、I/F303は、無線通信ネットワーク210と内部のインターフェースを司り、外部装置からのデータの入出力を制御する。
センサ304は、通信機101の挙動を検出するための情報を出力する。例えば、センサ304は、ジャイロセンサや3軸加速度センサなどによって実現され、通信機101に加速度が生じた場合に、生じた加速度に応じた情報を出力する。タイマ305は、計時機能を有する。例えば、タイマ305は実時間を計時する。また、タイマ305は所定のタイミングからの経過時間を計時してもよい。
(GPS通信機107のハードウェア構成例)
つぎに、GPS通信機107のハードウェア構成例について説明する。図4は、GPS通信機107のハードウェア構成例を示すブロック図である。図4において、GPS通信機107は、CPU401と、メモリ402と、I/F403と、各種センサ404と、タイマ405と、GPSユニット406を有する。各構成部はバス400によってそれぞれ接続されている。
つぎに、GPS通信機107のハードウェア構成例について説明する。図4は、GPS通信機107のハードウェア構成例を示すブロック図である。図4において、GPS通信機107は、CPU401と、メモリ402と、I/F403と、各種センサ404と、タイマ405と、GPSユニット406を有する。各構成部はバス400によってそれぞれ接続されている。
CPU401は、GPS通信機107の全体の制御を司る。メモリ402は、ROM、RAMおよびフラッシュROMなどを含む。ROMおよびフラッシュROMは、例えば、ブートプログラムなどの各種プログラムを記憶する。RAMは、CPU401のワークエリアとして使用される。
I/F403は、通信回線を通じて無線通信ネットワーク210に接続され、無線通信ネットワーク210を介して他の装置(例えば中継機102)に接続される。I/F403は、無線通信ネットワーク210と内部のインターフェースを司り、外部装置からのデータの入出力を制御する。
各種センサ404は、速度センサ、加速度センサ、角速度センサなどの、自機の位置や挙動を判断することが可能な情報を出力する。各種センサ404の出力値は、CPU401による自機の現在位置の算出や、速度や方位の変化量の測定などに用いられる。タイマ405は、計時機能を有する。例えば、タイマ405は実時間を計時する。また、タイマ405は所定のタイミングからの経過時間を計時してもよい。
GPS通信機107は、GPSユニット406を有している。GPSユニット406は、GPS衛星からの電波を受信し、自機の現在位置を示すGPS情報を出力する。
(中継機102のハードウェア構成例)
つぎに、中継機102のハードウェア構成例について説明する。図5は、中継機102のハードウェア構成例を示すブロック図である。図5において、中継機102は、CPU501と、メモリ502と、I/F503と、I/F504と、を有する。また、各構成部はバス500によってそれぞれ接続されている。
つぎに、中継機102のハードウェア構成例について説明する。図5は、中継機102のハードウェア構成例を示すブロック図である。図5において、中継機102は、CPU501と、メモリ502と、I/F503と、I/F504と、を有する。また、各構成部はバス500によってそれぞれ接続されている。
ここで、CPU501は、中継機102の全体の制御を司る。メモリ502は、ROM、RAMおよびフラッシュROMなどを含む。ROMおよびフラッシュROMは、例えば、ブートプログラムなどの各種プログラムを記憶する。RAMは、CPU501のワークエリアとして使用される。
I/F503は、通信回線を通じて無線通信ネットワーク210に接続され、無線通信ネットワーク210を介して、例えば通信機101やGPS通信機107などの他の装置に接続される。また、I/F504は、通信回線を通じてネットワーク220に接続され、ネットワーク220を介して、例えば発情報知装置104などの他の装置に接続される。そして、I/F503およびI/F504は、無線通信ネットワーク210およびネットワーク220と内部のインターフェースを司り、外部装置からのデータの入出力を制御する。
(発情報知装置104等のハードウェア構成例)
つぎに、発情報知装置104およびクライアント装置105のハードウェア構成例について説明する。ここでは、発情報知装置104およびクライアント装置105を、単に「発情報知装置104等」と表記する。
つぎに、発情報知装置104およびクライアント装置105のハードウェア構成例について説明する。ここでは、発情報知装置104およびクライアント装置105を、単に「発情報知装置104等」と表記する。
図6は、発情報知装置104等のハードウェア構成例を示すブロック図である。図6において、発情報知装置104等は、CPU601と、ROM602と、RAM603と、磁気ディスクドライブ604と、磁気ディスク605と、光ディスクドライブ606と、光ディスク607と、ディスプレイ608と、I/F609と、キーボード610と、マウス611と、スキャナ612と、プリンタ613と、を有している。また、各構成部はバス600によってそれぞれ接続されている。
ここで、CPU601は、発情報知装置104等の全体の制御を司る。ROM602は、ブートプログラムなどのプログラムを記憶している。RAM603は、CPU601のワークエリアとして使用される。磁気ディスクドライブ604は、CPU601の制御にしたがって磁気ディスク605に対するデータのリード/ライトを制御する。磁気ディスク605は、磁気ディスクドライブ604の制御で書き込まれたデータを記憶する。
光ディスクドライブ606は、CPU601の制御にしたがって光ディスク607に対するデータのリード/ライトを制御する。光ディスク607は、光ディスクドライブ606の制御で書き込まれたデータを記憶したり、光ディスク607に記憶されたデータをコンピュータに読み取らせたりする。
ディスプレイ608は、カーソル、アイコンあるいはツールボックスをはじめ、文書、画像、機能情報などのデータを表示する。ディスプレイ608としては、例えば、CRT、TFT液晶ディスプレイ、プラズマディスプレイなどを採用することができる。
I/F609は、通信回線を通じてネットワーク220に接続され、ネットワーク220を介して他の装置(例えば、中継機102やクライアント装置105)に接続される。そして、I/F609は、ネットワーク220と内部のインターフェースを司り、外部装置からのデータの入出力を制御する。I/F609には、例えば、モデムやLANアダプタなどを採用することができる。
キーボード610は、文字、数字、各種指示などの入力のためのキーを有し、データの入力を行う。また、タッチパネル式の入力パッドやテンキーなどであってもよい。マウス611は、カーソルの移動や範囲選択、あるいはウィンドウの移動やサイズの変更などを行う。ポインティングデバイスとして同様に機能を有するものであれば、トラックボールやジョイスティックなどであってもよい。
スキャナ612は、画像を光学的に読み取り、発情報知装置104内に画像データを取り込む。なお、スキャナ612は、OCR(Optical Character Reader)機能を持たせてもよい。また、プリンタ613は、画像データや文書データを印刷する。プリンタ613には、例えば、レーザプリンタやインクジェットプリンタを採用することができる。
なお、例えば、発情報知装置104は、上述した構成部のうち、光ディスクドライブ606や光ディスク607やディスプレイ608やマウス611やスキャナ612やプリンタ613を有していなくてもよい。また、クライアント装置105は、光ディスクドライブ606や光ディスク607やマウス611やスキャナ612やプリンタ613を有していなくてもよい。
(通信機101が記憶している情報の一例)
つぎに、通信機101が記憶している情報の一例について説明する。上述したように、通信機101は計測結果情報テーブル201を記憶している。例えば、計測結果情報テーブル201は、通信機101のメモリ302によって実現される。
つぎに、通信機101が記憶している情報の一例について説明する。上述したように、通信機101は計測結果情報テーブル201を記憶している。例えば、計測結果情報テーブル201は、通信機101のメモリ302によって実現される。
<計測結果情報テーブル201の記憶内容の一例>
図7は、計測結果情報テーブル201の記憶内容の一例を示す説明図である。図7において、計測結果情報テーブル201は、計測日時、計測値のフィールドを有する。これらのフィールドに情報を設定することにより、計測結果情報テーブル201には計測日時と計測値との組み合わせごとの計測結果情報700−1〜700−6がレコードとして記憶される。
図7は、計測結果情報テーブル201の記憶内容の一例を示す説明図である。図7において、計測結果情報テーブル201は、計測日時、計測値のフィールドを有する。これらのフィールドに情報を設定することにより、計測結果情報テーブル201には計測日時と計測値との組み合わせごとの計測結果情報700−1〜700−6がレコードとして記憶される。
ここで、計測日時は、過去の計測結果情報の送信タイミングの日時を表す。本実施の形態の場合、一例として、計測日時は、直近の6回分の計測結果情報の送信タイミングの日時を表している。また、計測値は、過去の計測結果情報の送信タイミングの時点における家畜Aの歩数の計測値を表す。本実施の形態の場合、一例として、計測値は、直近の6回分の計測結果情報の送信タイミングの時点における家畜Aの歩数の計測値を表している。
例えば、通信機101は、計測値を「0」に設定したタイミングなど、所定のタイミングから現在に至るまでの家畜Aの歩数を、現在の計測値として累積した値を記憶している。家畜Aが1歩歩行するごとに、通信機101に瞬間的に加速度が生じる。通信機101は、この加速度をセンサ304により検出すると、現在の計測値を「+1」カウントアップする。
そして、通信機101は、タイマ305の計時結果に基づいて、計測結果情報の送信タイミングとなると、この送信タイミングに対応する計測日時に、現在の計測値を関連づけた計測結果情報を記憶する。送信タイミングは、例えば毎時00分としている。
図7において、計測結果情報700−1は、「2012年2月20日6時00分」の時点での計測値が「C6(C6は正の整数)」であったことを表している。計測結果情報を記憶すると、通信機101は、計測結果情報テーブル201に記憶された各計測結果情報を、中継機102を介して、発情報知装置104に送信する。
なお、ここでは、通信機101は直近の6回分の計測結果情報を記憶している例を説明したが、これに限らない。通信機101は、過去の計測結果情報を記憶していなくてもよい。例えば、この場合、通信機101は、計測結果情報の送信タイミングとなると、現在の計測値を計測結果情報として送信し、当該計測結果情報を削除してもよい。このような構成にすることにより、計測結果情報の記憶にあたって、通信機101が記憶するデータ量を削減することができる。
また、ここでは、通信機101が計測結果情報テーブル201に記憶された各計測結果情報を送信するようにしたが、これに限らない。例えば、通信機101は、直近の1回分の計測結果情報のみ、具体的には、図7の例では計測結果情報700−1のみ、を送信するようにしてもよい。このような構成にすることにより、計測結果情報の送信にあたって、通信機101が送信するデータ量を削減することができる。
さらに、通信機101は、直近の1回分の計測結果情報と、過去の送信タイミングで送信に失敗した計測結果情報とを送信するようにしてもよい。例えば、この場合、中継機102は、通信機101から計測結果情報を受信すると、計測結果情報を受信したことを表す受信成功情報を通信機101に送信する。通信機101は、計測結果情報を送信してから所定期間内に受信成功情報を受信しなければ、この計測結果情報の送信に失敗したと判定する。
そして、この場合、通信機101は、送信に失敗したと判定した計測結果情報に、送信が失敗したことを表す情報を関連づけて記憶しておく。その後、計測結果情報の送信タイミングとなると、通信機101は、直近の1回分の計測結果情報と、送信に失敗した計測結果情報とを送信する。このような構成にすることにより、計測結果情報の送信にあたって、通信機101が送信するデータ量を削減しながら、計測結果情報を確実に中継機102に送信することができる。
(発情報知装置104が記憶している情報の一例)
つぎに、発情報知装置104が記憶している情報の一例について説明する。上述したように、発情報知装置104は各種DB202,203,204を記憶している。各種DB202,203,204は、発情報知装置104のROM602、RAM603、磁気ディスク605、光ディスク607などの記憶部によって実現される。
つぎに、発情報知装置104が記憶している情報の一例について説明する。上述したように、発情報知装置104は各種DB202,203,204を記憶している。各種DB202,203,204は、発情報知装置104のROM602、RAM603、磁気ディスク605、光ディスク607などの記憶部によって実現される。
<歩数DB202の記憶内容の一例>
図8は、歩数DB202の記憶内容の一例を示す説明図である。図8において、歩数DB202は、通信機101ごとに記憶されており、通信機101を識別するための通信機IDを有する。歩数DB202は、日付、歩数、発情兆候フラグのフィールドを有する。これらの各フィールドに情報を設定することにより、歩数DB202には日付と歩数履歴と発情兆候フラグとの組み合わせごとの歩数情報800−1〜800−3等がレコードとして記憶される。
図8は、歩数DB202の記憶内容の一例を示す説明図である。図8において、歩数DB202は、通信機101ごとに記憶されており、通信機101を識別するための通信機IDを有する。歩数DB202は、日付、歩数、発情兆候フラグのフィールドを有する。これらの各フィールドに情報を設定することにより、歩数DB202には日付と歩数履歴と発情兆候フラグとの組み合わせごとの歩数情報800−1〜800−3等がレコードとして記憶される。
ここで、日付は、歩数を計測された日付、例えば年月日を表す。歩数は、計測結果情報に基づく家畜Aの歩数を表す。歩数のフィールドには、例えば、「0〜1時」、「1〜2時」、「2〜3時」、…、「22〜23時」、「23〜24時」といったように、時間帯フィールドが設けられている。各々の時間帯フィールドには、その時間帯における家畜Aの歩数を表す情報が記憶される。例えば、発情報知装置104は、各々の時間帯フィールドの、末尾の時刻における計測値から先頭の時刻における計測値を減算した値を、その時間帯における家畜Aの歩数として各々の時間帯フィールドに記憶する。
例えば、発情報知装置104は、「2012年2月20日2時00分」における計測値が「C2」であり、一つ前の「2012年2月20日1時00分」における計測値が「C1」であることを表す情報を含む計測結果情報を取得したとする。この場合、発情報知装置104は、日付が「2012年2月20日」、時刻が「2時」で特定される歩数フィールドに、「C2」から「C1」を減算した「N302(=C2−C1)」を記憶する。
また、時間帯フィールドには、各時刻において中継機102から計測結果情報を受信した際の、送信元の中継機102を識別するための中継機IDが記憶される中継機IDフィールドが設けられている。発情報知装置104は、中継機IDフィールドに、計測結果情報を受信した際の送信元となる中継機102を示す中継機IDを記憶する。具体的には、発情報知装置104は、中継機IDフィールドに、「2012年2月20日2時00分」に計測結果情報を受信した際、当該計測結果情報の送信元となる中継機102の中継機ID「B4」を記憶する。図8において、N301,N302と記載された行、あるいは、が、N201,N202と記載された行に「歩数」の情報が記録されており、B4,B4あるいはB2,B2と記載された行に中継機IDが記録されている。
発情兆候フラグには、それぞれのフラグが、例えばOFFを表す「0」またはONを表す「1」に記憶することが可能な、ON/OFFフィールドが設けられている。また、発情兆候フラグには、それぞれのフラグが「1」に設定された際の日時が記憶される、フラグON日時フィールドも設けられている。
例えば、発情報知装置104は、所定条件を満たした場合に、発情兆候フラグのON/OFFフィールドに「1」を記憶する。一方、発情報知装置104は、ON/OFFフィールドに「1」を記憶していないときには「0」を記憶しておく。なお、発情兆候フラグの設定については、図15などを用いて後述する。
歩数DB202は、通信機101ごとに、それぞれ上述した情報を記憶する。通信機101は、固有の識別子である通信機IDを有しており、計測結果情報とともに自機の通信機IDを送信する。発情報知装置104は、受信した通信機IDに基づいて、いずれの通信機IDを有する通信機101から送信された計測結果情報であるかを特定する。そして、発情報知装置104は、特定した通信機101に対応する各フィールドに、受信した計測結果情報に基づく歩数情報を記憶する。
<群れ管理DB203の記憶内容の一例>
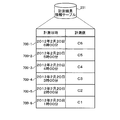
図9は、群れ管理DB203の記憶内容の一例を示す説明図である。図9において、群れ管理DB203は、群れID、GPS保有通信機ID、通信機IDのフィールドを有する。これらのフィールドに情報が予め設定されることにより、群れ管理DB203には群れIDとGPS保有通信機IDと通信機IDとの組み合わせごとの群れ管理情報900−1〜900−4等がレコードとして記憶されている。
図9は、群れ管理DB203の記憶内容の一例を示す説明図である。図9において、群れ管理DB203は、群れID、GPS保有通信機ID、通信機IDのフィールドを有する。これらのフィールドに情報が予め設定されることにより、群れ管理DB203には群れIDとGPS保有通信機IDと通信機IDとの組み合わせごとの群れ管理情報900−1〜900−4等がレコードとして記憶されている。
群れIDは、それぞれの群れの識別子を表す。GPS保有通信機IDは、GPS通信機107が装着された家畜Anを識別するための情報であり、GPS通信機107が装着された家畜Anの通信機IDを表している。通信機IDは、それぞれの通信機101の識別子を表している。例えば、図9において、群れ管理情報900−1は、群れID「Ma」には、通信機ID「G101〜G189」の90個の通信機101のうち、通信機ID「G110」に、GPS通信機107が装着されていることを表している。
<GPS通信機DB204の記憶内容>
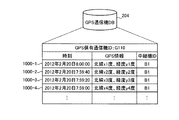
つぎに、GPS通信機DB204の記憶内容の一例について説明する。図10は、GPS通信機DB204の記憶内容の一例を示す説明図である。図10において、GPS通信機DB204は、群れに存在する特定の家畜Anに装着された通信機101ごとに記憶されており、その家畜Anが備えている通信機101を識別するためのGPS保有通信機IDも格納されている。
つぎに、GPS通信機DB204の記憶内容の一例について説明する。図10は、GPS通信機DB204の記憶内容の一例を示す説明図である。図10において、GPS通信機DB204は、群れに存在する特定の家畜Anに装着された通信機101ごとに記憶されており、その家畜Anが備えている通信機101を識別するためのGPS保有通信機IDも格納されている。
GPS通信機DB204は、時刻、GPS情報、中継機IDのフィールドを有する。これらのフィールドに情報を設定することにより、GPS通信機DB204には時刻とGPS情報と中継機IDとの組み合わせごとのGPS位置情報1000−1〜1000−4等がレコードとして記憶される。
時刻は、GPS情報を受信した時刻を表している。例えば、20秒間隔で受信するものとしている。なお、GPS通信機107からの送信間隔である受信間隔は、20秒に限らず、分単位や時間単位の設定とすることも可能である。GPS情報は、地図上の一点を特定可能な情報であり、例えば、緯度や経度を表す情報や、座標を表す情報などである。中継機IDは、それぞれの中継機102の識別子を表しており、GPS通信機107から受信したGPS情報を発情報知装置104へ送信した中継機102を表している。
例えば、図10において、GPS位置情報1000−1は、時刻「2012年2月20日8:00:00」に通信機ID「G110」の通信機101が、「北緯x1度、経度y1度」の位置にいることを表している。また、中継機ID「B1」からGPS情報を受信したことを表している。
(発情報知装置104の機能的構成例)
図11は、発情報知装置104の機能的構成例を示すブロック図である。図11において、発情報知装置104は、取得部1101と、判定部1102と、記憶部1103と、検索部1104と、出力部1105と、送信部1106と、受付部1107とを含む構成である。記憶部1103を除く制御部となる機能は、例えば、図6に示した磁気ディスク605などに記憶されたプログラムをCPU601に実行させることにより、または、I/F609や磁気ディスク605などにより、その機能を実現する。各機能部の処理結果は、例えば、RAM603に記憶される。
図11は、発情報知装置104の機能的構成例を示すブロック図である。図11において、発情報知装置104は、取得部1101と、判定部1102と、記憶部1103と、検索部1104と、出力部1105と、送信部1106と、受付部1107とを含む構成である。記憶部1103を除く制御部となる機能は、例えば、図6に示した磁気ディスク605などに記憶されたプログラムをCPU601に実行させることにより、または、I/F609や磁気ディスク605などにより、その機能を実現する。各機能部の処理結果は、例えば、RAM603に記憶される。
取得部1101は、複数の家畜Aそれぞれの計測結果情報を取得する機能を有する。具体的には、取得部1101は、設置位置の異なる複数の中継機102のいずれかの中継機102の通信エリアに位置している家畜Aの歩数の計測結果情報を取得する。計測結果情報は、家畜Aに装着される通信機101を識別するための通信機IDの情報を含む。取得部1101が計測結果情報を取得するタイミングは、ネットワーク220を介して中継機102から計測結果情報を受信したタイミングとしている。中継機102は、例えば1時間間隔で通信機101から計測結果情報を受信し、受信した計測結果情報を発情報知装置104に送信する。
本実施の形態において、取得部1101が計測結果情報を取得するタイミングは、中継機102からの受信タイミングとしており、すなわち1時間間隔としている。取得部1101が計測結果情報を取得するタイミングは、これに限らず、例えば、中継機102から受信した計測結果情報を所定の格納部に格納しておき、予め設定したタイミングや任意のタイミングとしてもよい。
判定部1102は、取得部1101によって取得された計測結果情報に基づいて、複数の家畜Aそれぞれについて発情の有無を判定する機能を有する。具体的には、判定部1102は、取得部1101によって取得された計測結果情報に基づいて、家畜Aの歩数が所定の条件を満たすか否かを判定し、所定の条件を満たす場合に家畜Aが発情しているものと判定する。
所定の条件は、作業者Wが見つけ出したい家畜Aの発情、疾病などの異常状態に応じて、任意に設定することが可能である。例えば、本実施の形態では、発情したメス牛を見つけたい場合、発情するとメス牛の歩数が増加するという性質を利用し、所定の条件を、家畜の歩数が所定の閾値Th以上という条件にしている。また、疾病の家畜Aを見つけたい場合、疾病により家畜Aの歩数が減少するという性質を利用し、所定の条件を、家畜の歩数が別途定めた閾値よりも少ない、という条件にすればよい。
また、所定の条件は、作業者Wが見つけ出したい家畜Aの異常状態に応じて、閾値を複数段階に設定することも可能である。例えば、所定の条件を、病気aの場合には「Th1以下」、健康状態の場合には「Th1〜Th2(Th1<Th2)」、発情の場合には「Th2〜Th3(Th2<Th3)」、天敵が出現した際の変化の場合には「Th3以上」として設定することも可能である。このようにすれば、家畜Aの状態を詳細に把握することが可能になる。
記憶部1103は、群れを形成する家畜群の各々に装着された通信機101と、家畜群のいずれかの家畜Anに装着された特定の通信機とを対応付けて群れごとに記憶する機能を有する。特定の通信機は、自機の位置情報を取得するGPS機能を有するものであり、具体的には、GPS通信機107である。特定の通信機は、駆動電源となる電池を有し、電源のON/OFFが自在なものであり、通常時は電源がOFFになっている。
記憶部1103は、具体的には、群れの中の一頭に装着されたGPS通信機107と、このGPS通信機107が装着された家畜Anと群れを同じにする他の家畜Aの通信機101とを対応付けて、記憶している。記憶部1103は、例えば、図9に示した群れ管理DB203に相当する。
検索部1104は、判定部1102によって複数の家畜Aのうち特定の家畜Anが発情有りと判定された場合、特定の家畜Anに対応する特定の位置情報通信機を検索する。位置情報通信機は、GPS通信機107である。具体的には、検索部1104は、特定の家畜Anが属する群れの情報、および、群れに属するいずれかの家畜Aに装着された位置情報を出力可能なGPS通信機107に関する情報に基づき、特定の家畜Anに対応する特定のGPS通信機107を検索する。特定の家畜Anが属する群れの情報とは、例えば、図9に示したように、群れIDおよび通信機IDが対応付けられている群れ管理情報900である。GPS通信機107に関する情報とは、例えば、図9に示したGPS保有通信機IDである。
例えば、検索部1104は、判定部1102により所定の条件を満たすと判定された場合、記憶部1103を参照して、通信機101に対応するGPS通信機107を検索する。具体的には、検索部1104は、判定部1102によって家畜Aの歩数が所定の閾値Th以上であると判定された場合、記憶部1103を参照して通信機101に対応するGPS通信機107を検索する。これにより、通信機101が装着された発情した家畜Aと同じ群れの中にいるGPS通信機107が装着された家畜Anを特定することができる。
送信部1106は、検索部1104によって検索された特定のGPS通信機107に、特定のGPS通信機107が有する自機の位置情報を取得する機能の起動指示を送信する機能を有する。具体的には、送信部1106は、検索部1104によって検索されたGPS通信機107が有するGPS機能の起動指示を、GPS通信機107に送信する。送信部1106は、例えば、ネットワーク220および中継機102を介して、起動指示情報をGPS通信機107に送信する。
GPS通信機107は、駆動電源となる電池を有する。GPS通信機107は、送信部1106からの起動指示情報を受けて電源をONにする。GPS通信機107は、GPS情報を取得し、当該GPS情報を、中継機102を介して発情報知装置104に送信する。GPS通信機107は、家畜Aの移動にともなって中継機102の通信エリア103が変わると、変わった通信エリア103の中継機102を介してGPS情報を発情報知装置104に送信する。このように、GPS通信機107は、起動指示情報を受信したときに電源をONにするため、電池の消費電力を抑えることができる。
ここで、複数の群れが近接している場合、同一の中継機102の通信エリア103内に複数のGPS通信機107が存在することが考えられる。複数のGPS通信機107がそれぞれ発情報知装置104からの起動指示情報によって起動することのないよう、発情報知装置104は、起動指示情報とともにGPS通信機107ごとに対応する認証キーを送信することが望ましい。このような構成の場合、GPS通信機107は、認証キーを用いて認証に成功したときに電源をONにすればよい。これにより、起動対象となるGPS通信機107のみを起動させることができる。
また、同一の群れを形成する、通信機101が装着される発情した家畜AとGPS通信機107が装着される家畜Anとが、中継機102との位置関係では、通信機101とGPS通信機107とで中継機102の通信エリア103が異なる事態が生じ得る。つまり、例えば、通信機101が通信エリア103aに位置し、GPS通信機107が通信エリア103bに位置することがある。
このような場合、発情報知装置104は、通信機101が位置する通信エリア103aの中継機102aに起動指示情報を送信することとなり、GPS通信機107が起動しなくなる。このような事態を考慮すると、GPS通信機107は、起動指示を受けて電源をONにしたときには、起動が完了したことを表す受信成功情報を発情報知装置104に送信することが望ましい。
また、この場合、発情報知装置104は、起動指示を送信してから所定期間内に受信成功情報を受信しなければ、起動指示の送信に失敗したと判定し、先に送信した中継機102aの近傍の他の中継機102bに起動指示を送信すればよい。このような構成とすれば、通信機101とGPS通信機107とで中継機102の通信エリア103が異なる事態が生じても、GPS通信機107を確実に起動させることができる。
出力部1105は、特定のGPS通信機107から受信した位置情報を出力する。また、出力部1105は、特定のGPS通信機107の識別情報を出力する。GPS通信機107の識別情報とは、GPS通信機107が装着された家畜Anを識別できる情報であればよく、本実施の形態では、GPS通信機107が装着された家畜Anの通信機101の識別情報(通信機ID)としている。
つまり、出力部1105は、電源がONになったGPS通信機107が装着されている家畜Aの通信機IDを出力する。なお、GPS通信機107の識別情報は、これに限らず、GPS通信機107そのものを識別する識別情報としてもよい。出力とは、表示することや送信することである。すなわち、出力部1105から出力されたGPS通信機107の識別情報は、発情報知装置104に接続されるディスプレイ608に表示されたり、I/F609から、PCやノートPC、携帯電話、スマートフォンなどのクライアント装置105に送信されたりする。
本実施の形態では、電源がONになったGPS通信機107が装着された家畜Aの通信機IDとともに、GPS通信機107のGPS情報を出力するようにしている。なお、GPS通信機107の識別情報のみを出力し、キーボード610などの入力デバイスやクライアント装置105からの要求を受け付けた場合に、GPS情報も出力してもよい。クライアント装置105にGPS通信機107の識別情報およびGPS情報が出力された際の画面例については、図12を用いて後述する。
ここで、本実施の形態では、GPS通信機107に起動指示情報を送信するに際しては、中継機102を介しているため、中継機102を識別するための中継機IDが必要となる。そのため、中継機102は、発情報知装置104に計測結果情報を送信する際に、自機の中継機IDも同時に送信するようにし、取得部1101が計測結果情報を取得する際に、中継機IDも同時に取得し、歩数DB202に記録するようにしている。
中継機102から計測結果情報を受信した後、しばらく経過して取得部1101が計測結果情報を取得したとすると、起動指示を行う際に、家畜Anが別の通信エリア103に移動してしまうことが考えられる。そのため、取得部1101による計測結果情報の取得タイミングは、中継機102からの受信タイミングと同じタイミング、またはそれに近いタイミングとすることが望ましい。
また、受付部1107は、特定のGPS通信機107のGPS機能の停止要求を受け付ける。受付部1107は、発情報知装置104に接続されるキーボード610やマウス611などから停止要求を受け付けたり、I/F609を介して、クライアント装置105から停止要求を受け付けたりする。なお、停止要求の受け付けは、作業者Wによる入力に限らない。例えば、クライアント装置105のGPS機能を利用して、起動したGPS通信機107の付近にクライアント装置105が位置した際に、発情した家畜Aを見つけたものとして、自動的に停止要求を受け付けるようにしてもよい。
また、起動したGPS通信機107の付近にクライアント装置105が位置した際に、クライアント装置105に、停止要求を行うか否かを通知するようにし、作業者Wからの入力により停止要求を受け付けるようにしてもよい。なお、クライアント装置105に表示される停止要求を受け付ける際の画面例については、図13を用いて後述する。
送信部1106は、受付部1107によって停止要求が受け付けられた場合、特定のGPS通信機107にGPS機能の停止指示情報を送信する。停止指示情報の送信は、電池の消費電力を抑えるという観点から、受付部1107に停止要求が受け付けられた場合に限らず、例えば、発情期間に応じた数日といった所定期間が経過した場合に、強制的に行ってもよい。これにより、例えば作業者Wが停止要求を行うことを忘れていた場合にも、GPS通信機107の電源をOFFにすることができる。
GPS通信機107は、送信部1106からの停止指示情報を受けて電源をOFFにする。このように、GPS通信機107は、停止指示情報を受信したときに電源をOFFにするため、電池の消費電力を抑えることができる。また、電池の消費電力を抑えるという観点から、停止要求情報を受信することなく、例えば、発情期間に応じた数日といった所定期間が経過した場合には、GPS通信機107は、強制的に、電源をOFFにするようにしてもよい。これにより、例えば作業者Wが停止要求を行うことを忘れていた場合にも、GPS通信機107の電源をOFFにすることができる。
また、起動指示情報を送信する場合と同様、送信時の確実性を高めるという観点から、発情報知装置104は、停止指示情報とともに各GPS通信機107に対応する認証キーを送信してもよい。GPS通信機107は、認証キーを用いて認証に成功したときに電源をOFFにすればよい。また、GPS通信機107が停止指示情報を受信した場合には受信成功情報を発情報知装置104に送信するようにし、発情報知装置104が受信成功情報を受信しない場合には停止指示情報を送信先の中継機102を変えて再度送信するようにしてもよい。
また、本実施の形態では、送信部1106は、中継機102を介してGPS通信機107に起動/停止指示情報を送信するようにしているが、中継機102を介さずに、ネットワーク220のみを介して起動/停止指示情報を送信することも可能である。この場合、起動/停止指示情報とともに、例えば認証キーなど、起動/停止させるGPS通信機107を特定する情報を送信すればよく、GPS通信機107は、認証に成功したときに電源を起動/停止すればよい。
このような構成にすれば、発情報知装置104は、中継機102を識別する必要がなく、すなわち、中継機IDを取得および記憶する必要がない。また、起動/停止指示を行う際に、計測結果情報の送信元の中継機102の通信エリア103内にGPS通信機107を装着した家畜Anがいなくなったとしても、通信エリア103に関係なく、起動指示を行うことができる。さらに、クライアント装置105から直接GPS通信機107に停止指示情報を送信することも可能になる。
また、GPS情報についても、GPS通信機107から、中継機102を介さずにネットワーク220のみを介して発情報知装置104に送信することも可能である。このような構成にすれば、発情報知装置104、クライアント装置105およびGPS通信機107は、通信エリア103に関係なく、つまり、中継機102を識別することなく、それぞれが情報を送受することができる。
また、本実施の形態では、群れを形成する家畜Aのうち、一頭にのみGPS通信機107を装着させた。これにより、初期費用を抑えることができる。
また、群れを形成する家畜Aのうち、複数頭にGPS通信機107を装着させてもよいし、全頭にGPS通信機107を装着させてもよい。全頭にGPS通信機107を装着させた場合、発情報知装置104は、発情していると判定された家畜AのGPS通信機107に対して、起動指示を行えばよい。このような構成であっても、通常時はGPS通信機107の電源をOFFにし、起動指示があったときに電源をONにすることができるため、電池の消費電力を抑えることができる。
(クライアント装置105に表示される画面例)
つぎに、クライアント装置105に表示される画面例について説明する。
つぎに、クライアント装置105に表示される画面例について説明する。
<画面例1>
図12は、クライアント装置105に表示される画面例を示す説明図(その1)である。図12において、ディスプレイ106には、発情している家畜A(メス牛)が見つかった旨、および、発情した家畜Aの位置を表示させるか否かの通知画面1200が表示されている。通知画面1200には、発情した家畜Aの位置を表示させるか否かを作業者Wに選択するための選択ボタン1210が表示されている。通知画面1200を表示させることにより、作業者Wが発情した家畜Aの位置を知りたいときに、作業者Wの選択により、家畜Aの位置を表示させることができる。
図12は、クライアント装置105に表示される画面例を示す説明図(その1)である。図12において、ディスプレイ106には、発情している家畜A(メス牛)が見つかった旨、および、発情した家畜Aの位置を表示させるか否かの通知画面1200が表示されている。通知画面1200には、発情した家畜Aの位置を表示させるか否かを作業者Wに選択するための選択ボタン1210が表示されている。通知画面1200を表示させることにより、作業者Wが発情した家畜Aの位置を知りたいときに、作業者Wの選択により、家畜Aの位置を表示させることができる。
選択ボタン1210のうち、作業者Wが「はい」を選択すると、発情した家畜Aの位置を表した地図画面1201が表示される。地図画面1201には、発情した家畜Aの属する群れの位置が表示されており、詳細には、GPS通信機107が装着された家畜Anの位置が表示されている。地図画面1201を頼りに、作業者Wが「○×エリア」に行くと、発情した家畜Aの属する群れを確認することができる。作業者Wは、この群れの中に発情した家畜Aが存在することがわかっているので、群れの中から発情した家畜Aを容易に見つけることができる。
選択ボタン1210のうち、作業者Wが「いいえ」を選択すると、待機画面1202が表示される。待機画面1202には、アイコン1211が表示される。アイコン表示により、発情した家畜Aを未確認の状態であることを作業者Wに示唆することができ、作業者Wは、家畜Aの位置に赴くことを失念することを抑止することができる。
待機画面1202において作業者Wがアイコン1211を選択すると、地図画面1201が表示される。作業者Wがアイコン1211を選択した際に、発情報知装置104にGPS通信機107の位置情報を要求し、地図画面1201に、現在のGPS通信機107の位置情報を反映させる。これにより、作業者Wは、発情した家畜Aの位置を知りたいときに、作業者Wの選択により、家畜Aの現在の位置を表示させることができる。
<画面例2>
図13は、クライアント装置105に表示される画面例を示す説明図(その2)である。図13において、ディスプレイ106には、GPS通信機107の電源をOFFにするか否かの通知画面1301が表示されている。この通知画面1301は、図12の地図画面1201が表示された後に表示される。例えば、地図画面1201が表示された直後に表示されるものとしてもよいし、図12のアイコン1211を選択した際に、表示選択可能のものとしてもよい。
図13は、クライアント装置105に表示される画面例を示す説明図(その2)である。図13において、ディスプレイ106には、GPS通信機107の電源をOFFにするか否かの通知画面1301が表示されている。この通知画面1301は、図12の地図画面1201が表示された後に表示される。例えば、地図画面1201が表示された直後に表示されるものとしてもよいし、図12のアイコン1211を選択した際に、表示選択可能のものとしてもよい。
また、クライアント装置105のGPS機能を用いて、クライアント装置105が、例えば50m以内といった、発情した家畜Aの群れの近くに位置した際に、表示されるものとしてもよい。通知画面1301において、作業者Wが選択ボタン1310のうち、「はい」を選択すると、発情報知装置104を介して、GPS通信機107に停止指示情報が送信される。一方、通知画面1301において、作業者Wが選択ボタン1310のうち、「いいえ」を選択すると、停止指示情報は送信されない。このように、GPS電源のOFFを通知することにより、GPS電源のOFFを促すことができ、GPS通信機107の電池の消費電力を抑えることができる。
(中継機102の発情報知処理手順)
つぎに、中継機102の発情報知処理手順について説明する。図14は、中継機102の発情報知処理手順の一例を示すフローチャートである。図14のフローチャートにおいて、中継機102は、通信機101から家畜Aの歩数結果である計測結果情報および通信機101の通信機IDを受信したか否かを判断する(ステップS1401)。なお、計測結果情報および通信機IDは、例えば1時間おきに通信機101から送信される。
つぎに、中継機102の発情報知処理手順について説明する。図14は、中継機102の発情報知処理手順の一例を示すフローチャートである。図14のフローチャートにおいて、中継機102は、通信機101から家畜Aの歩数結果である計測結果情報および通信機101の通信機IDを受信したか否かを判断する(ステップS1401)。なお、計測結果情報および通信機IDは、例えば1時間おきに通信機101から送信される。
計測結果情報および通信機IDを受信しない場合(ステップS1401:No)、中継機102は、ステップS1403の処理に移行させる。計測結果情報および通信機IDを受信した場合(ステップS1401:Yes)、中継機102は、受信した計測結果情報および通信機IDと自機の中継機IDとを発情報知装置104に送信する(ステップS1402)。
そして、中継機102は、GPS通信機107からGPS情報を受信したか否かを判断する(ステップS1403)。なお、GPS通信機107は通常時は電源がOFFになっているため、GPS情報の受信は、GPS通信機107を起動後に行われる。GPS通信機107の起動については図18を用いて後述する。GPS情報は、所定時間(例えば20秒)ごとにGPS通信機107から送信される。
ステップS1403において、GPS情報を受信していない場合(ステップS1403:No)、本フローチャートによる一連の処理を終了する。GPS情報を受信した場合(ステップS1403:Yes)、中継機102は、GPS情報および自機の中継機IDを発情報知装置104に送信し(ステップS1404)、本フローチャートによる一連の処理を終了する。
このように、中継機102は、計測結果情報、通信機ID、GPS情報といった各種情報を受信した場合、自機の中継機IDとともに、発情報知装置104に送信することができる。
(発情報知装置104の発情報知処理手順)
つぎに、発情報知装置104の発情報知処理手順について説明する。図15は、発情報知装置104の発情報知処理手順の一例を示すフローチャート(その1)である。図15のフローチャートにおいて、発情報知装置104は、まず、中継機102から、計測結果情報、通信機IDおよび中継機IDを受信したか否かを判断する(ステップS1501)。ステップS1501において、発情報知装置104は、計測結果情報、通信機IDおよび中継機IDを受信するまで待機する(ステップS1501:No)。
つぎに、発情報知装置104の発情報知処理手順について説明する。図15は、発情報知装置104の発情報知処理手順の一例を示すフローチャート(その1)である。図15のフローチャートにおいて、発情報知装置104は、まず、中継機102から、計測結果情報、通信機IDおよび中継機IDを受信したか否かを判断する(ステップS1501)。ステップS1501において、発情報知装置104は、計測結果情報、通信機IDおよび中継機IDを受信するまで待機する(ステップS1501:No)。
計測結果情報、通信機IDおよび中継機IDを受信すると(ステップS1501:Yes)、発情報知装置104は、計測結果情報、通信機IDおよび中継機IDを歩数DB202(図8参照)に記憶する(ステップS1502)。そして、発情報知装置104は、歩数DB202を参照し、通信機IDに対応する家畜Aに発情の兆候があるか否かを示す発情兆候フラグがONであるか否かを判断する(ステップS1503)。
発情兆候フラグがONである場合(ステップS1503:Yes)、すなわち、通信機IDに対応する家畜Aに発情の兆候があるものと判定されている場合、本フローチャートによる一連の処理を終了する。ステップS1503において、発情兆候フラグがOFFである場合(ステップS1503:No)、発情報知装置104は、歩数DB202に記憶されている直近3回の計測結果が所定の閾値Thを超えたか否かを判断する(ステップS1504)。
直近3回の計測結果が所定の閾値Thを超えていない場合(ステップS1504:No)、本フローチャートによる一連の処理を終了する。直近3回の計測結果が所定の閾値Thを超えた場合(ステップS1504:Yes)、発情報知装置104は、家畜Aが発情しているものとして、歩数DB202の発情兆候フラグをONにする(ステップS1505)。そして、発情報知装置104は、群れ管理DB203(図9参照)を参照し、通信機IDに対応するGPS保有通信機IDを検索する(ステップS1506)。
GPS保有通信機IDは、GPS通信機107が装着された家畜Anを識別するための情報であり、GPS通信機107が装着された家畜Anの通信機IDに相当する。ステップS1506の処理は、具体的には、発情の兆候がある家畜Aと同じ群れの中の、GPS通信機107が装着された家畜Anを特定することに相当する。
ステップS1506の後、発情報知装置104は、該当するGPS通信機107を起動させるための起動指示情報を中継機102に送信し(ステップS1507)、本フローチャートによる一連の処理を終了する。これにより、家畜Aに発情の兆候があるときに、GPS通信機107を起動させることができる。
図16は、発情報知装置104の発情報知処理手順の一例を示すフローチャート(その2)である。図16のフローチャートにおいて、発情報知装置104は、中継機102から、GPS通信機107のGPS情報および中継機IDを受信したか否かを判断する(ステップS1601)。発情報知装置104は、GPS情報および中継機IDを受信しない場合(ステップS1601:No)、ステップS1603に移行させる。
GPS情報および中継機IDを受信すると(ステップS1601:Yes)、発情報知装置104は、GPS通信機DB204(図10参照)にGPS情報および中継機IDを記憶する(ステップS1602)。これにより、GPS通信機107の位置、およびGPS通信機107が位置する通信エリア103の中継機102を管理することができる。
そして、発情報知装置104は、クライアント装置105にGPS情報を送信済みであるか否かを判断する(ステップS1603)。クライアント装置105にGPS情報を送信済みである場合(ステップS1603:Yes)、本フローチャートによる一連の処理を終了する。
クライアント装置105にGPS情報を送信済みではない場合(ステップS1603:No)、発情報知装置104は、GPS情報をクライアント装置105に送信し(ステップS1604)、本フローチャートによる一連の処理を終了する。これにより、クライアント装置105では、GPS情報を表示することが可能になる。
図17は、発情報知装置104の発情報知処理手順の一例を示すフローチャート(その3)である。図17のフローチャートにおいて、発情報知装置104は、クライアント装置105から、GPS情報の要求情報を受信したか否かを判断する(ステップS1701)。GPS情報の要求情報を受信する場合とは、例えば、発情した家畜AのGPS情報を一度はクライアント装置105へ送信したものの、そのときに作業者Wが発情した家畜Aのところへ赴くことができず、作業者Wが再度GPS情報を確認したい場合に相当する。
GPS情報の要求情報を受信しない場合(ステップS1701:No)、発情報知装置104は、ステップS1704の処理に移行させる。GPS情報の要求情報を受信した場合(ステップS1701:Yes)、発情報知装置104は、GPS通信機DB204(図10参照)を参照し、直近のGPS情報を検索する(ステップS1702)。
ステップS1702では、具体的には、直近のGPS位置情報1000−1のGPS情報を抽出する。そして、発情報知装置104は、GPS情報をクライアント装置105に送信する(ステップS1703)。これにより、クライアント装置105では、GPS情報を表示することができる。
つぎに、発情報知装置104は、クライアント装置105から、GPS通信機107の停止指示情報を受信したか否かを判断する(ステップS1704)。停止指示情報を受信しない場合(ステップS1704:No)、本フローチャートによる一連の処理を終了する。停止指示情報を受信した場合(ステップS1704:Yes)、発情報知装置104は、歩数DB202(図8参照)に記憶される発情兆候フラグをOFFにする(ステップS1705)。
そして、発情報知装置104は、GPS通信機DB204(図10参照)を参照し、GPS通信機107が位置する通信エリア103の中継機IDを検索する(ステップS1706)。ステップS1706では、具体的には、直近のGPS位置情報1000−1の中継機IDを抽出する。
そして、発情報知装置104は、検索した中継機IDの中継機102に、GPS通信機107を停止させるための停止指示情報を送信し(ステップS1707)、本フローチャートによる一連の処理を終了する。これにより、GPS通信機107は、電源をOFFにすることができる。
なお、ステップS1701におけるGPS情報の要求情報を受信した場合に、GPS通信機107に対して、現在の位置情報の送信要求をおこうようにしてもよい。具体的には、GPS通信機DB204(図10参照)を参照して、GPS通信機107が位置する通信エリア103の中継機102に送信要求を行う。この送信要求を受けて、GPS通信機107は、GPS情報を、中継機102を介して発情報知装置104に送信するようにすればよい。これにより、リアルタイムのGPS情報を出力することができる。
(GPS通信機107の発情報知処理手順)
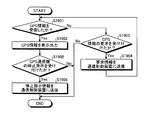
つぎに、GPS通信機107の発情報知処理手順について説明する。図18は、GPS通信機107の発情報知処理手順の一例を示すフローチャートである。図18のフローチャートにおいて、GPS通信機107は、発情報知装置104から起動指示情報を受信したか否かを判断する(ステップS1801)。ステップS1801において、GPS通信機107は、起動指示情報を受信するまで待機する(ステップS1801:No)。
つぎに、GPS通信機107の発情報知処理手順について説明する。図18は、GPS通信機107の発情報知処理手順の一例を示すフローチャートである。図18のフローチャートにおいて、GPS通信機107は、発情報知装置104から起動指示情報を受信したか否かを判断する(ステップS1801)。ステップS1801において、GPS通信機107は、起動指示情報を受信するまで待機する(ステップS1801:No)。
起動指示情報を受信すると(ステップS1801:Yes)、GPS通信機107は、GPS通信機107の電源をONにする(ステップS1802)。そして、GPS通信機107は、GPS衛星からの電波を受信することにより、GPS情報を取得するとともに(ステップS1803)、取得したGPS情報を中継機102に送信する(ステップS1804)。
つぎに、GPS通信機107は、停止指示情報を受信したか否かを判断する(ステップS1805)。停止指示情報を受信しない場合(ステップS1805:No)、ステップS1803に戻る。なお、GPS情報の中継機102への送信は、例えば20秒間隔とする。ステップS1805において、停止指示情報を受信した場合(ステップS1805:Yes)、GPS通信機107は、GPS通信機107の電源をOFFにし(ステップS1806)、本フローチャートによる一連の処理を終了する。
これにより、発情報知装置104からの指示によりGPS通信機107を起動させることができ、つまり、家畜Aに発情の兆候があるときにのみ、GPS通信機107を起動させることができる。また、発情報知装置104からの指示によりGPS通信機107を停止させることができる。したがって、GPS通信機107の電池の消費電力を抑えることができる。
(クライアント装置105の発情報知処理手順)
つぎに、クライアント装置105の発情報知処理手順について説明する。図19は、クライアント装置105の発情報知処理手順の一例を示すフローチャートである。図19のフローチャートにおいて、クライアント装置105は、発情報知装置104からGPS情報を受信したか否かを判断する(ステップS1901)。
つぎに、クライアント装置105の発情報知処理手順について説明する。図19は、クライアント装置105の発情報知処理手順の一例を示すフローチャートである。図19のフローチャートにおいて、クライアント装置105は、発情報知装置104からGPS情報を受信したか否かを判断する(ステップS1901)。
GPS情報を受信した場合(ステップS1901:Yes)、クライアント装置105は、GPS情報を表示出力する(ステップS1902)。ステップS1902では、図12に示した通知画面1200のように、発情している家畜Aが見つかった旨を表示させたり、地図画面1201のように発情した家畜Aの位置を表示させたりする。
ステップS1901において、GPS情報を受信しない場合(ステップS1901:No)、クライアント装置105は、作業者WからGPS情報の要求を受け付けたか否かを判断する(ステップS1903)。GPS情報の要求の受け付けは、例えば、図12の待機画面1202にて行われる。GPS情報の要求を受け付けない場合(ステップS1903:No)、本フローチャートによる一連の処理を終了する。
GPS情報の要求を受け付けた場合(ステップS1903:Yes)、クライアント装置105は、要求情報を発情報知装置104に送信し(ステップS1904)、ステップS1901に戻る。要求情報の送信により、発情報知装置104から、最新のGPS情報を受信することができる。
また、ステップS1902の後は、GPS通信機107の停止指示を受け付けたか否かを判断する(ステップS1905)。GPS通信機107の停止指示の受け付けは、例えば図13の通知画面1301にて行われる。
ステップS1905において、GPS通信機107の停止指示を受け付けない場合(ステップS1905:No)、本フローチャートによる一連の処理を終了する。GPS通信機107の停止指示を受け付けた場合(ステップS1905:Yes)、クライアント装置105は、停止指示情報を発情報知装置104に送信し(ステップS1906)、本フローチャートによる一連の処理を終了する。これにより、作業者Wがディスプレイ106上で発情した家畜Aの居場所を確認した後は、GPS通信機107の電源を停止させることができる。
以上説明したように、実施の形態にかかる発情報知装置104によれば、群れの中に異常状態の家畜Aが存在する場合に、群れの中の特定の家畜Anに装着させたGPS通信機107を起動させることができる。これにより、GPS通信機107の電池の消費電力を抑えることができ、すなわち、電池の交換サイクルを長期化することができる。したがって、GPS通信機107の電池交換またはGPS通信機107自体の交換を行う手間を軽減することができ、よって、家畜の追跡にかかる作業負荷を軽減することができる。
また、実施の形態にかかる発情報知装置104によれば、群れの中に発情の兆候を示す家畜Aが存在する場合に、群れの中の特定の家畜Anに装着させたGPS通信機107を起動させることができる。これにより、発情の兆候を示す家畜Aの追跡にかかる作業負荷を軽減することができる。
また、実施の形態にかかる発情報知装置104によれば、GPS通信機107の停止要求を受け付けた場合に、GPS通信機107を停止させることができる。したがって、GPS通信機107の電池の消費電力をより抑えることができる。
なお、クライアント装置105と通信機IDとを対応付けておき、異常状態の家畜Aが存在する場合に、当該家畜Aの通信機IDと対応付けられるクライアント装置105に、当該家畜Aが異常状態にある旨を通知するようにしてもよい。これにより、同一の農場F内であっても家畜Aごとに作業者Wが異なるような共同経営の場合に、異常状態の家畜Aを管理する作業者Wのみに、当該家畜Aに異常が見られる旨を通知することができる。
なお、本実施の形態で説明した発情報知方法は、予め用意されたプログラムをパーソナル・コンピュータやワークステーション等のコンピュータで実行することにより実現することができる。本発情報知プログラムは、ハードディスク、フレキシブルディスク、CD−ROM、MO、DVD等のコンピュータで読み取り可能な記録媒体に記録され、コンピュータによって記録媒体から読み出されることによって実行される。また、本発情報知プログラムは、インターネット等のネットワークを介して配布してもよい。
101 通信機
102 中継機
104 発情報知装置
105 クライアント装置
202 歩数DB
203 群れ管理DB
204 GPS通信機DB
1101 取得部
1102 判定部
1103 記憶部
1104 検索部
1105 出力部
1106 送信部
1107 受付部
102 中継機
104 発情報知装置
105 クライアント装置
202 歩数DB
203 群れ管理DB
204 GPS通信機DB
1101 取得部
1102 判定部
1103 記憶部
1104 検索部
1105 出力部
1106 送信部
1107 受付部
Claims (5)
- それぞれが群れに属する複数の家畜にそれぞれ装着された歩数計測手段からの歩数計測結果に基づき、発情の判定を行うコンピュータが実行する発情報知方法であって、
前記複数の家畜それぞれの前記歩数計測結果を取得し、
前記歩数計測結果に基づいて、前記複数の家畜それぞれについて発情の有無を判定し、
前記複数の家畜のうち特定の家畜が発情有りと判定した場合、前記特定の家畜が属する前記群れの情報、および、前記群れに属するいずれかの前記家畜に装着された位置情報を出力可能な位置情報通信機に関する情報に基づき、前記特定の家畜に対応する特定の位置情報通信機を検索し、
検索した前記特定の位置情報通信機に、前記特定の位置情報通信機が有する自機の位置情報を取得する機能の起動指示を送信し、
前記特定の位置情報通信機から受信した位置情報を出力する、
処理を前記コンピュータが実行することを特徴とする発情報知方法。 - 請求項1に記載の発情報知方法であって、
前記特定の位置情報通信機の前記機能の停止要求を受け付け、
前記停止要求を受け付けた場合、前記特定の位置情報通信機に前記機能の停止指示を送信する、
処理を前記コンピュータが実行することを特徴とする発情報知方法。 - それぞれが群れに属する複数の家畜にそれぞれ装着された歩数計測手段からの歩数計測結果に基づき、発情の判定を行う発情報知装置であって、
前記複数の家畜それぞれの前記歩数計測結果を取得する取得部と、
前記歩数計測結果に基づいて、前記複数の家畜それぞれについて発情の有無を判定する判定部と、
前記判定部によって前記複数の家畜のうち特定の家畜が発情有りと判定された場合、前記特定の家畜が属する前記群れの情報、および、前記群れに属するいずれかの前記家畜に装着された位置情報を出力可能な位置情報通信機に関する情報に基づき、前記特定の家畜に対応する特定の位置情報通信機を検索する検索部と、
前記検索部によって検索された前記特定の位置情報通信機に、前記特定の位置情報通信機が有する自機の位置情報を取得する機能の起動指示を送信する送信部と、
前記特定の位置情報通信機から受信した位置情報を出力する出力部と、
を有することを特徴とする発情報知装置。 - 請求項3に記載の発情報知装置であって、
前記特定の位置情報通信機の前記機能の停止要求を受け付ける受付部を有し、
前記送信部は、
前記受付部によって前記停止要求が受け付けられた場合、前記特定の位置情報通信機に前記機能の停止指示を送信することを特徴とする発情報知装置。 - それぞれが群れに属する複数の家畜にそれぞれ装着された歩数計測手段からの歩数計測結果に基づき、発情の判定を行うコンピュータに実行させる発情報知プログラムであって、
前記複数の家畜それぞれの前記歩数計測結果を取得し、
前記歩数計測結果に基づいて、前記複数の家畜それぞれについて発情の有無を判定し、
前記複数の家畜のうち特定の家畜が発情有りと判定した場合、前記特定の家畜が属する前記群れの情報、および、前記群れに属するいずれかの前記家畜に装着された位置情報を出力可能な位置情報通信機に関する情報に基づき、前記特定の家畜に対応する特定の位置情報通信機を検索し、
検索した前記特定の位置情報通信機に、前記特定の位置情報通信機が有する自機の位置情報を取得する機能の起動指示を送信し、
前記特定の位置情報通信機から受信した位置情報を出力する、
処理を前記コンピュータに実行させることを特徴とする発情報知プログラム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2012/058718 WO2013145302A1 (ja) | 2012-03-30 | 2012-03-30 | 発情報知方法、発情報知装置、および発情報知プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2013145302A1 JPWO2013145302A1 (ja) | 2015-08-03 |
| JP5846292B2 true JP5846292B2 (ja) | 2016-01-20 |
Family
ID=49258664
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014507262A Expired - Fee Related JP5846292B2 (ja) | 2012-03-30 | 2012-03-30 | 発情報知方法、発情報知装置、および発情報知プログラム |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP2832219B1 (ja) |
| JP (1) | JP5846292B2 (ja) |
| PL (1) | PL2832219T3 (ja) |
| WO (1) | WO2013145302A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2021033732A1 (ja) * | 2019-08-20 | 2021-02-25 | ||
| US11412713B2 (en) | 2016-03-15 | 2022-08-16 | Sony Corporation | Information processing device and information processing method |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CZ306397B6 (cs) * | 2014-12-30 | 2017-01-04 | Agrosoft Tábor, S.R.O. | Způsob řízení technologického vybavení živočišné farmy |
| WO2016121096A1 (ja) * | 2015-01-30 | 2016-08-04 | 株式会社コムテック | 豚の非通常時検出方法及び非通常時検出装置 |
| WO2017130736A1 (ja) * | 2016-01-29 | 2017-08-03 | ソニー株式会社 | 情報処理装置、情報処理システム及び情報処理方法 |
| CN105994006B (zh) * | 2016-07-27 | 2019-06-11 | 深圳市安居物联网科技有限公司 | 一种养殖物检测方法和装置 |
| CN106818532B (zh) * | 2017-01-23 | 2020-04-07 | 中国农业大学 | 一种奶牛发情鉴定系统及鉴定方法 |
| CN109588340A (zh) * | 2018-12-19 | 2019-04-09 | 中国农业大学 | 一种羊的生理行为监测系统及方法 |
| JP7211595B2 (ja) * | 2020-11-02 | 2023-01-24 | 国立大学法人北海道国立大学機構 | 異常行動検知装置、異常行動検知プログラムおよび異常行動検知方法 |
| JP7827418B2 (ja) * | 2021-07-29 | 2026-03-10 | Nttドコモビジネス株式会社 | 位置特定支援装置、位置特定支援システム、位置特定支援方法及びコンピュータープログラム |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11128210A (ja) * | 1997-10-29 | 1999-05-18 | Matsushita Electric Works Ltd | 動物の運動量管理装置及び運動量管理システム並びに動物の運動量管理プログラムを記録した記録媒体 |
| JP2002181927A (ja) * | 2000-12-18 | 2002-06-26 | Akira Fukuda | 移動体の位置監視システム |
| JP3634308B2 (ja) | 2001-12-28 | 2005-03-30 | 株式会社J−オイルミルズ | 乳牛の歩行距離管理装置及び乳牛の繁殖管理方法,乳牛の繁殖管理システム並びにプログラム |
| NO319077B1 (no) * | 2002-03-21 | 2005-06-13 | Telenor Asa | Tradlose dyr |
| IL166394A0 (en) * | 2005-01-19 | 2006-01-15 | Vladimir Voronin | A system and apparatus for detecting estrus |
| JP2008011837A (ja) | 2006-06-30 | 2008-01-24 | Hokkaido | 家畜個体識別装置 |
| JP4767811B2 (ja) * | 2006-10-12 | 2011-09-07 | 株式会社 コムテック | 発情期検出方法、発情期検出装置 |
| JP2008148569A (ja) * | 2006-12-14 | 2008-07-03 | Oki Electric Ind Co Ltd | 飼育支援システム |
| CN102100185B (zh) * | 2010-12-22 | 2012-12-05 | 银川奥特软件有限公司 | 奶牛发情监控系统 |
-
2012
- 2012-03-30 PL PL12873009T patent/PL2832219T3/pl unknown
- 2012-03-30 EP EP12873009.0A patent/EP2832219B1/en not_active Not-in-force
- 2012-03-30 WO PCT/JP2012/058718 patent/WO2013145302A1/ja not_active Ceased
- 2012-03-30 JP JP2014507262A patent/JP5846292B2/ja not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11412713B2 (en) | 2016-03-15 | 2022-08-16 | Sony Corporation | Information processing device and information processing method |
| JPWO2021033732A1 (ja) * | 2019-08-20 | 2021-02-25 | ||
| JP7228171B2 (ja) | 2019-08-20 | 2023-02-24 | 国立大学法人岩手大学 | 放牧動物管理システム |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2013145302A1 (ja) | 2013-10-03 |
| PL2832219T3 (pl) | 2019-06-28 |
| EP2832219B1 (en) | 2018-12-26 |
| EP2832219A1 (en) | 2015-02-04 |
| EP2832219A4 (en) | 2015-04-22 |
| JPWO2013145302A1 (ja) | 2015-08-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5846292B2 (ja) | 発情報知方法、発情報知装置、および発情報知プログラム | |
| JP5846297B2 (ja) | 発情報知方法、発情報知装置および発情報知プログラム | |
| US12034400B2 (en) | Livestock management system | |
| EP2109358B1 (en) | Animal management system and corresponding method including radio animal tag and additional transceiver(s) | |
| JP5846295B2 (ja) | 発情報知方法、発情報知プログラム、および発情報知装置 | |
| JP3634308B2 (ja) | 乳牛の歩行距離管理装置及び乳牛の繁殖管理方法,乳牛の繁殖管理システム並びにプログラム | |
| JP5846294B2 (ja) | 発情報知方法、発情報知装置、および発情報知プログラム | |
| KR20150029057A (ko) | 반려 동물 관리 시스템 | |
| JP5892235B2 (ja) | 歩数補正方法、歩数補正装置、歩数補正プログラム、発情報知方法および発情報知装置 | |
| Francis et al. | Design and implementation of a cattle grazing tracking and anti-theft alert GPS/GSM collar, leveraging on improvement in telecom and ICT infrastructure | |
| CN110547218A (zh) | 一种牲畜寻找系统 | |
| JP2020058277A (ja) | 検知装置、検知方法及びプログラム | |
| JPWO2013145322A1 (ja) | 歩数補正方法および歩数補正装置 | |
| JP5975095B2 (ja) | 発情報知方法、発情報知装置および発情報知プログラム | |
| RU2840803C1 (ru) | Система управления домашним скотом | |
| JP2022108661A (ja) | 情報処理装置、システム、情報処理方法、およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151027 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151109 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5846292 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |