JP5821328B2 - 電子機器装置、ロボットハンド及びロボット - Google Patents
電子機器装置、ロボットハンド及びロボット Download PDFInfo
- Publication number
- JP5821328B2 JP5821328B2 JP2011143837A JP2011143837A JP5821328B2 JP 5821328 B2 JP5821328 B2 JP 5821328B2 JP 2011143837 A JP2011143837 A JP 2011143837A JP 2011143837 A JP2011143837 A JP 2011143837A JP 5821328 B2 JP5821328 B2 JP 5821328B2
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- capacitance
- external pressure
- detection
- disposed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/16—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring several components of force
- G01L5/165—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring several components of force using variations in capacitance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/081—Touching devices, e.g. pressure-sensitive
- B25J13/082—Grasping-force detectors
- B25J13/083—Grasping-force detectors fitted with slippage detectors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/22—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring the force applied to control members, e.g. control members of vehicles, triggers
- G01L5/226—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring the force applied to control members, e.g. control members of vehicles, triggers to manipulators, e.g. the force due to gripping
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/02—Input arrangements using manually operated switches, e.g. using keyboards or dials
- G06F3/0202—Constructional details or processes of manufacture of the input device
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0338—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of limited linear or angular displacement of an operating part of the device from a neutral position, e.g. isotonic or isometric joysticks
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/044—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means
- G06F3/0445—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means using two or more layers of sensing electrodes, e.g. using two layers of electrodes separated by a dielectric layer
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/044—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means
- G06F3/0446—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means using a grid-like structure of electrodes in at least two directions, e.g. using row and column electrodes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/044—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means
- G06F3/0447—Position sensing using the local deformation of sensor cells
Description
特許文献2の検出装置は、受圧シートの表面に複数の柱状突起を格子状に配置し、これら表面突起の周辺部を等分した個所の裏面に円錐状の突起を設けた構成となっている。特許文献2の検出装置では、外圧を3次元の力ベクトルとして検出することは可能であるが、突起の変形の度合いで外圧の検出限界が決まってしまう。
特許文献3の検出装置は、静電容量を検出するセンシング領域を備えた素子基板と対向基板との間に誘電体層を設け、その変形による静電容量の変化から圧力の変化を検出する構成となっている。しかしながら、特許文献3の検出装置では、測定面にかかる外圧の面内方向の力(すべり力)を測定することができない。
以上のように、特許文献1〜3の検出装置では、いずれも外圧の方向と大きさを高い精度で検出することができなかった。
図1は、本発明の第1実施形態に係る検出装置1の概略構成を示す分解斜視図である。図1においては、便宜上、誘電体40(図7参照)の図示を省略している。図1において、符号Pは基準点、符号Sは1つの弾性体突起32に対応して配置された複数の容量検出素子S1〜S4(第1容量電極12と第2容量電極22と誘電体40とで構成される素子)が検出する単位検出領域を示している。
次に、センシング回路60の動作を図3〜図6を参照しながら説明する。
図3は、本実施形態に係るセンシング回路60の動作を示すタイミングチャートである。図4は、リセット期間におけるセンシング回路60の動作を示す説明図である。図5は、センシング期間におけるセンシング回路60の動作を示す説明図である。図6は、読出期間におけるセンシング回路60の動作を示す説明図である。
図3に示すように、センシング回路60は、リセット期間Tres、センシング期間Tsen、及び読出期間Toutを一単位として動作する。
先ず、リセット期間Tresにおいて、第1制御線72に供給されるリセット信号RESのレベルは電位VDに設定される。すなわち、リセット期間Tresにおいては、リセット信号RESのレベルはハイレベルに設定され、リセットトランジスター61はオン状態となる。一方、第2制御線76に供給される選択信号SELはローレベルに設定され、選択トランジスター63はオフ状態となる。すると、図4に示すように、増幅トランジスター62のゲート電位VAは電源電位VRHに設定(リセット)される。また、容量検出素子Clの第1容量電極12にも電源電位VRHが供給され、容量検出素子Clの第1容量電極12と第2容量電極22との間の電圧はVRH−Vcomに設定される。
次に、リセット期間Tres経過後の次の期間であるセンシング期間Tsenにおいては、リセット信号RESのレベルがVDからGND(=0V)に変化する。すると、図5に示すように、リセットトランジスター61はオフ状態となる。また、センシング期間Tsenにおいては、選択信号SELはローレベルに設定され、選択トランジスター63はオフ状態となる。増幅トランジスター62のゲートのインピーダンスは十分に高いため、センシング期間Tsenにおいては、増幅トランジスター62のゲートは電気的にフローティング状態となる。基準容量素子Crの一方の電極は第1制御線72に接続されているため、第1制御線72に供給されるリセット信号RESのレベルがVDからGNDに変化する。すると、それに応じて増幅トランジスター62のゲートの電位VAも変化する。このときのゲートの電位VAの変化量は、基準容量素子Crと容量検出素子Clとの容量比に応じた値となる。
センシング期間Tsenの次の期間である読出期間Toutにおいては、選択信号SELがローレベルからハイレベルに変化する。すると、図6に示すように、選択トランジスター63がオン状態となる。これにより、増幅トランジスター62のゲートの電位VAに応じた大きさの検出電流Itが検出線74を流れる。この検出電流Itは、対象物(例えば指)と検出装置1との接触を検出する検出回路(図示略)へ供給される。

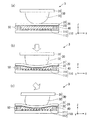
図7(a)〜(c)は、第1実施形態に係る容量検出素子による静電容量の変化を示す断面図である。図8(a)〜(c)は、図7(a)〜(c)に対応した、第1実施形態に係る容量検出素子による静電容量の変化を示す平面図である。なお、図7(a)及び図8(a)は第3基板30の表面に外圧が付加される前の状態(外圧の作用がないとき)を示している。図7(b)及び図8(b)は第3基板30の表面に垂直方向(すべり力がない状態)の外圧が付加された状態を示している。図7(c)及び図8(c)は第3基板30の表面に斜め方向(すべり力がある状態)の外圧が付加された状態を示している。また、図8(a)〜(c)において、符号Gは弾性体突起32の重心(圧力中心)を示している。
図12は、図1に対応した、本発明の第2実施形態に係る検出装置2の概略構成を示す分解斜視図である。なお、図12においては、便宜上、誘電体40(図13参照)の図示を省略している。また、図12において、符号Pは基準点、符号Sは1つの弾性体突起32に対応して配置された複数の容量検出素子Si(第1容量電極112と第2容量電極22と誘電体40とで構成される素子)が検出する単位検出領域を示している。本実施形態の検出装置2は、複数の第1容量電極112が互いに直交する2方向に少なくとも縦4行横4列に配置されている点で、上述の第1実施形態で説明した検出装置1と異なる。図12において、図1と同様の要素には同一の符号を付し、詳細な説明は省略する。なお、図12においては、便宜上、複数の第1容量電極112が単位検出領域S当たり縦4行横4列に配置されているが、実際には図13及び図14に示すように複数の第1容量電極112が単位検出領域S当たり縦4行横4列以上に配置されていてもよいものとする。
図16は、図12に対応した、本発明の第3実施形態に係る検出装置3の概略構成を示す分解斜視図である。なお、図16においては、便宜上、誘電体40(図17参照)の図示を省略している。また、図16において、符号Pは基準点、符号Sは1つの弾性体突起32に対応して配置された複数の容量検出素子Si(第1容量電極112と第2容量電極22と誘電体40とで構成される素子)が検出する単位検出領域を示している。本実施形態の検出装置3は、第1基板110と第2基板20の間において少なくとも隣接する弾性体突起32の境界にスペーサー50が配置されている点で、上述の第2実施形態で説明した検出装置2と異なる。図16において、図12と同様の要素には同一の符号を付し、詳細な説明は省略する。
図18は、図12に対応した、本発明の第4実施形態に係る検出装置4の概略構成を示す分解斜視図である。なお、図18においては、便宜上、誘電体40(図19参照)の図示を省略している。また、図18において、符号Pは基準点、符号Sは1つの弾性体突起32に対応して配置された複数の容量検出素子Si(第1容量電極112と第2容量電極22と誘電体40とで構成される素子)が検出する単位検出領域を示している。本実施形態の検出装置4は、第3基板30の表面に第3基板本体31よりも高い剛性を有する補強部材51が配置されている点で、上述の第2実施形態で説明した検出装置2と異なる。図18において、図12と同様の要素には同一の符号を付し、詳細な説明は省略する。
図20は、図1に対応した、本発明の第5実施形態に係る検出装置5の概略構成を示す分解斜視図である。なお、図20においては、便宜上、誘電体40(図21参照)の図示を省略している。また、図20において、符号Pは基準点、符号Sは1つの弾性体突起32に対応して配置された容量検出素子(第1容量電極212と第2容量電極222と誘電体40とで構成される素子)が検出する単位検出領域を示している。本実施形態の検出装置5は、第2容量電極222が第1基板210の基準点Pと重なる位置に配置されている点で、上述の第1実施形態で説明した検出装置1と異なる。図20において、図1と同様の要素には同一の符号を付し、詳細な説明は省略する。
また、外力のY方向成分Fy(外力の面内方向成分のうちY方向に作用する分力の割合)は上述した式(3)で表される。
また、外力のZ方向成分Fz(外力の垂直方向成分)は上述した式(4)で表される。
図24は、上記実施形態に係る検出装置1〜5を適用した携帯電話機1000の概略構成を示す模式図である。携帯電話機1000は、複数の操作ボタン1003及びスクロールボタン1002、並びに表示部としての検出装置を適用した液晶パネル1001を備えている。スクロールボタン1002を操作することによって、液晶パネル1001に表示される画面がスクロールされる。液晶パネル1001にはメニューボタン(図示略)が表示される。例えば、メニューボタンを指で触れると電話帳が表示されたり、携帯電話機の電話番号が表示されたりする。
図26は、上記実施形態に係る検出装置1〜5を適用したロボットハンド3000の概略構成を示す模式図である。図26(a)に示すように、ロボットハンド3000は、本体部3003及び一対のアーム部3002、並びに検出装置を適用した把持部3001を備えている。例えば、リモコン等の制御装置によりアーム部3002に駆動信号を送信すると、一対のアーム部3002が開閉動作する。
Claims (19)
- 複数配置された容量電極、を有する第1基板と、
前記容量電極を挟んで前記第1基板と対向配置された第2基板と、
前記第1基板と前記第2基板との間に配置された、弾性体若しくは流体からなる誘電体と、
外圧によって先端部が前記第2基板に当接した状態で弾性変形する弾性体突起、が形成された第3基板と、を備え、
1つの前記弾性体突起に対して複数の前記容量電極が配置され、外圧の方向と大きさを検出する検出装置を含むことを特徴とする電子機器装置。 - 外圧によって前記弾性体突起が弾性変形することにより変化する、前記容量電極と前記誘電体とで構成される複数の容量検出素子の静電容量値のうち任意に組み合わされた各容量検出素子の静電容量値の差分を演算し、その差分に基づいて外圧が加えられた方向と外圧の大きさを演算する演算装置を備えることを特徴とする請求項1に記載の電子機器装置。
- 前記複数の容量電極は、基準点に対して点対称に配置されていることを特徴とする請求項1または2に記載の電子機器装置。
- 前記複数の容量電極は、互いに直交する2方向にマトリックス状に配置されていることを特徴とする請求項3に記載の電子機器装置。
- 前記容量電極は、前記第1基板に配置された第1容量電極と、前記第2基板に配置された第2容量電極2と、を含むことを特徴とする請求項4に記載の電子機器装置。
- 前記容量電極は、前記第1基板の基準点と重なる位置に配置されていることを特徴とする請求項4に記載の電子機器装置。
- 前記複数の容量電極は、互いに直交する2方向に少なくとも4行4列に配置されていることを特徴とする請求項5または6に記載の電子機器装置。
- 前記弾性体突起は前記第3基板に複数形成されており、
前記複数の弾性体突起は、互いに離間して配置されていることを特徴とする請求項1〜7のいずれか1項に記載の電子機器装置。 - 前記第1基板と前記第2基板の間には、少なくとも隣接する前記弾性体突起の境界に、前記第1基板と前記第2基板との間の距離を一定に保つスペーサーが配置されていることを特徴とする請求項8に記載の電子機器装置。
- 前記第3基板の前記弾性体突起が形成された側と反対の側には、前記第3基板よりも高い剛性を有する補強部材が配置されていることを特徴とする請求項8または9に記載の電子機器装置。
- 請求項1〜10のいずれか1項に記載の電子機器装置は、ロボットハンドであることを特徴とする。
- 請求項1〜10のいずれか1項に記載の電子機器装置はロボットであることを特徴とする。
- 第1及び第2の電極が配置された第1基板と、
第3の電極が配置された第2基板と、
弾性体突起が配置された第3基板と、を備え、
前記弾性体突起のそれぞれに対して前記前記第1及び第2の電極が配置された前記第1基板の面と前記第3の電極が配置された第2基板の面とが誘電体を介して向かい合うように、前記第1基板と第2基板とが配置され、
前記弾性体突起が配置された前記第3基板の面と前記第2基板とが向かい合うように、前記第3基板と前記第2基板とが配置され、測定面にかかる外圧の方向を検出する検出装置を備えたことを特徴とする電子機器装置。 - 前記測定面に前記外圧がかかった際に、前記弾性体突起が前記第2基板を押圧することで前記誘電体の厚みが変化し、前記誘電体の厚みの変化に応じて変化する前記第1及び第2の電極から検出される電流値の差分に基づいて、前記測定面にかかる外圧の方向を検出することを特徴とする請求項13に記載の電子機器装置。
- 前記第1及び第2の電極で検出される電流値に基づいて、前記測定面にかかる外圧の大きさを検出することを特徴とする請求項14記載の電子機器装置。
- 前記第1及び第2の電極の配置位置に応じた補正係数に基づいて、前記測定面にかかる外圧の方向を検出することを特徴とする請求項14または15に記載の電子機器装置。
- 請求項13〜16のいずれか一項に記載の前記検出装置を備えることを特徴とするロボットハンド。
- 請求項13〜16のいずれか一項に記載の前記検出装置を備えることを特徴とするロボット。
- 第1及び第2の電極と、前記第1及び第2の電極のそれぞれに隣り合う位置に配置された第3の電極とを備えた第1基板と、
第2基板と、
弾性体突起が配置された第3基板と、を備え、
前記弾性体突起のそれぞれに対して前記第1及び第2の電極と前記第3の電極が配置された前記第1基板の面と第2基板とが誘電体を介して向かい合うように、前記第1基板と第2基板とが配置され、
前記弾性体突起が配置された前記第3基板の面と前記第2基板とが向かい合うように、前記第3基板と前記第2基板とが配置された検出装置を備えたことを特徴とする電子機器装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011143837A JP5821328B2 (ja) | 2010-07-26 | 2011-06-29 | 電子機器装置、ロボットハンド及びロボット |
| US13/190,889 US8904885B2 (en) | 2010-07-26 | 2011-07-26 | Detection device, electronic device, and robot |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010166792 | 2010-07-26 | ||
| JP2010166792 | 2010-07-26 | ||
| JP2011143837A JP5821328B2 (ja) | 2010-07-26 | 2011-06-29 | 電子機器装置、ロボットハンド及びロボット |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012047728A JP2012047728A (ja) | 2012-03-08 |
| JP2012047728A5 JP2012047728A5 (ja) | 2014-08-07 |
| JP5821328B2 true JP5821328B2 (ja) | 2015-11-24 |
Family
ID=45492454
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011143837A Expired - Fee Related JP5821328B2 (ja) | 2010-07-26 | 2011-06-29 | 電子機器装置、ロボットハンド及びロボット |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8904885B2 (ja) |
| JP (1) | JP5821328B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018174164A1 (ja) * | 2017-03-23 | 2018-09-27 | パナソニックIpマネジメント株式会社 | 触覚センサおよびこの触覚センサを構成する触覚センサユニット |
Families Citing this family (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2965974B1 (fr) * | 2010-10-12 | 2013-11-29 | Soitec Silicon On Insulator | Procédé de collage moléculaire de substrats en silicium et en verre |
| US9705068B2 (en) | 2012-06-19 | 2017-07-11 | Novasentis, Inc. | Ultra-thin inertial actuator |
| KR101971945B1 (ko) * | 2012-07-06 | 2019-04-25 | 삼성전자주식회사 | 촉각 측정 장치 및 방법 |
| US10088936B2 (en) * | 2013-01-07 | 2018-10-02 | Novasentis, Inc. | Thin profile user interface device and method providing localized haptic response |
| US10125758B2 (en) | 2013-08-30 | 2018-11-13 | Novasentis, Inc. | Electromechanical polymer pumps |
| US9833596B2 (en) | 2013-08-30 | 2017-12-05 | Novasentis, Inc. | Catheter having a steerable tip |
| US9507468B2 (en) | 2013-08-30 | 2016-11-29 | Novasentis, Inc. | Electromechanical polymer-based sensor |
| US9666391B2 (en) | 2013-10-22 | 2017-05-30 | Novasentis, Inc. | Retractable snap domes |
| US20160253019A1 (en) * | 2013-11-21 | 2016-09-01 | 3M Innovative Properties Company | Touch systems and methods employing force direction determination |
| US9652946B2 (en) | 2014-05-02 | 2017-05-16 | Novasentis, Inc. | Hands-free, wearable vibration devices and method |
| KR20170017883A (ko) * | 2014-06-09 | 2017-02-15 | 기가포톤 가부시키가이샤 | 레이저 시스템 |
| US9576446B2 (en) | 2014-08-07 | 2017-02-21 | Novasentis, Inc. | Ultra-thin haptic switch with lighting |
| US9972768B2 (en) | 2014-08-15 | 2018-05-15 | Novasentis, Inc. | Actuator structure and method |
| JP6459316B2 (ja) * | 2014-09-03 | 2019-01-30 | セイコーエプソン株式会社 | 有機エレクトロルミネッセンス装置および電子機器 |
| CN105716748B (zh) * | 2014-12-22 | 2020-08-21 | 松下知识产权经营株式会社 | 感压元件 |
| CN104655241B (zh) * | 2015-02-16 | 2018-04-17 | 苏州佳世达电通有限公司 | 电子装置 |
| KR101685800B1 (ko) * | 2015-04-10 | 2016-12-13 | 성균관대학교산학협력단 | 다축 힘 센서 및 이를 이용한 다축 힘을 감지할 수 있는 집게 |
| US9898095B2 (en) * | 2015-06-29 | 2018-02-20 | Synaptics Incorporated | Low-profile capacitive pointing stick |
| CN108139282B (zh) * | 2015-07-29 | 2020-10-16 | 小利兰·斯坦福大学托管委员会 | 关于敏感力传感器的方法和装置 |
| TWI599764B (zh) * | 2015-10-19 | 2017-09-21 | 國立清華大學 | 多階感測元件 |
| TWI593943B (zh) | 2015-10-19 | 2017-08-01 | 國立清華大學 | 可調變的感測元件 |
| US9733062B2 (en) * | 2015-11-20 | 2017-08-15 | General Electric Company | Systems and methods for monitoring component strain |
| US10012552B2 (en) * | 2015-11-23 | 2018-07-03 | General Electric Company | Systems and methods for monitoring component strain |
| US20170148152A1 (en) * | 2015-11-25 | 2017-05-25 | General Electric Company | Systems and Methods for Monitoring Component Strain |
| ITUA20163990A1 (it) * | 2016-05-31 | 2017-12-01 | St Microelectronics Srl | Dispositivo sensore di carico miniaturizzato con ridotta sensibilita' a stress termo-meccanico di incapsulamento, in particolare sensore di forza e di pressione |
| US10444104B2 (en) * | 2016-11-30 | 2019-10-15 | Texas Instruments Incorporated | Methods and apparatus to calibrate micro-electromechanical systems |
| US10197466B2 (en) * | 2016-11-30 | 2019-02-05 | Texas Instruments Incorporated | Methods and apparatus to calibrate micro-electromechanical systems |
| US10386256B2 (en) | 2016-11-30 | 2019-08-20 | Texas Instruments Incorporated | Methods and apparatus to calibrate micro-electromechanical systems |
| KR102330396B1 (ko) * | 2016-12-02 | 2021-11-24 | 주식회사 로보터스 | 정전 용량형 센서 |
| JP6832207B2 (ja) * | 2017-03-29 | 2021-02-24 | 東京エレクトロン株式会社 | 静電容量測定用の測定器 |
| CN107844119A (zh) * | 2017-12-14 | 2018-03-27 | 中国计量大学 | 基于时空转换的视觉导引方法及视觉导引车 |
| CN108362427A (zh) * | 2018-01-31 | 2018-08-03 | 北京他山科技有限公司 | 一种具有多功能层的接触传感器、电子皮肤和智能机器人 |
| KR102445562B1 (ko) * | 2018-03-29 | 2022-09-21 | 삼성디스플레이 주식회사 | 인쇄 회로 기판 패키지 및 이를 포함하는 표시 장치 |
| CN110834343A (zh) * | 2018-08-17 | 2020-02-25 | 北京猎户星空科技有限公司 | 用于机器人的机器手指、触摸感知装置及机器人 |
| CN113163045B (zh) * | 2020-01-22 | 2023-08-04 | 华为技术有限公司 | 一种压力检测结构及电子设备 |
| US20210285835A1 (en) * | 2020-03-16 | 2021-09-16 | New York University | Apparatus for Determining Shear Forces in Regard to a Pressure Imaging Array, Single Point Sensor for Shear Forces, and Method |
| CN111366274B (zh) * | 2020-04-07 | 2022-02-01 | 安徽大学 | 一种全柔性电容式三维力触觉传感器 |
| GB2600420B (en) * | 2020-10-27 | 2023-03-01 | Wootzano Ltd | System and method for sorting and/or packing items |
| JP2022111488A (ja) * | 2021-01-20 | 2022-08-01 | 本田技研工業株式会社 | 静電容量センサ |
| JP2022111489A (ja) * | 2021-01-20 | 2022-08-01 | 本田技研工業株式会社 | 3軸力センサ |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60135834A (ja) | 1983-12-26 | 1985-07-19 | Tamagawa Gakuen | 面圧測定装置 |
| JPH07128163A (ja) | 1993-11-08 | 1995-05-19 | Fuji Electric Co Ltd | 触覚センサ |
| US6550344B2 (en) * | 2001-05-04 | 2003-04-22 | Rosemount Aerospace Inc. | Semi-flush air data sensor |
| JP2003156731A (ja) * | 2001-09-07 | 2003-05-30 | Fujitsu Display Technologies Corp | 液晶表示装置及びその製造方法 |
| JP4987304B2 (ja) * | 2006-01-12 | 2012-07-25 | 昇 中山 | 柔軟接触型荷重測定センサ |
| JP4894769B2 (ja) | 2008-01-28 | 2012-03-14 | ソニー株式会社 | 表示装置及び電子機器 |
-
2011
- 2011-06-29 JP JP2011143837A patent/JP5821328B2/ja not_active Expired - Fee Related
- 2011-07-26 US US13/190,889 patent/US8904885B2/en not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018174164A1 (ja) * | 2017-03-23 | 2018-09-27 | パナソニックIpマネジメント株式会社 | 触覚センサおよびこの触覚センサを構成する触覚センサユニット |
| JPWO2018174164A1 (ja) * | 2017-03-23 | 2020-01-23 | パナソニックIpマネジメント株式会社 | 触覚センサおよびこの触覚センサを構成する触覚センサユニット |
| US11137297B2 (en) | 2017-03-23 | 2021-10-05 | Panasonic Intellectual Property Management Co., Ltd. | Tactile sensor, and tactile sensor unit constituting tactile sensor |
Also Published As
| Publication number | Publication date |
|---|---|
| US8904885B2 (en) | 2014-12-09 |
| JP2012047728A (ja) | 2012-03-08 |
| US20120017703A1 (en) | 2012-01-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5821328B2 (ja) | 電子機器装置、ロボットハンド及びロボット | |
| JP5821322B2 (ja) | 検出装置、電子機器及びロボット | |
| US9097597B2 (en) | Detection device, electronic apparatus, and robot | |
| US9121782B2 (en) | Detection device, electronic apparatus, and robot | |
| JP2012068029A (ja) | 検出装置、電子機器及びロボット | |
| JP2012163333A (ja) | 検出装置、電子機器及びロボット | |
| JP2013152129A (ja) | 力検出器、圧力検出装置、電子機器及びロボット | |
| JP2012026906A (ja) | 検出装置、電子機器及びロボット | |
| JP2013096884A (ja) | 検出装置、電子機器、及びロボット | |
| JP2013117458A (ja) | 検出装置、電子機器及びロボット | |
| JP2013096846A (ja) | 検出装置、電子機器及びロボット | |
| JP2012073051A (ja) | 検出装置、電子機器、及びロボット | |
| JP2013108754A (ja) | 力検出器、検出装置、電子機器及びロボット | |
| JP2012026905A (ja) | 検出装置、電子機器及びロボット | |
| JP2013108832A (ja) | 検出装置、電子機器及びロボット | |
| JP2013064681A (ja) | 検出装置、電子機器、及びロボット | |
| JP2012132816A (ja) | 圧力検出装置、電子機器、及びロボット | |
| JP2013088334A (ja) | 回転検出装置、検出装置、電子機器及びロボット | |
| JP2013113760A (ja) | 検出装置、電子機器及びロボット | |
| JP2012098148A (ja) | 圧力検出装置、電子機器、及びロボット | |
| JP2012026907A (ja) | 検出装置、電子機器及びロボット | |
| JP2012220316A (ja) | 検出装置、電子機器及びロボット | |
| JP2012108021A (ja) | 検出装置、電子機器及びロボット | |
| JP2011033404A (ja) | 触覚センサ、タッチパネルディスプレイ及びポインティングデバイス | |
| JP2012220317A (ja) | 検出装置、電子機器及びロボット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140619 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140619 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20150106 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150312 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150317 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150511 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150908 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150921 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5821328 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |