JP5820271B2 - 脊椎へのアクセスおよび視覚化のための開創器カニューレシステムおよび関連方法 - Google Patents
脊椎へのアクセスおよび視覚化のための開創器カニューレシステムおよび関連方法 Download PDFInfo
- Publication number
- JP5820271B2 JP5820271B2 JP2011532338A JP2011532338A JP5820271B2 JP 5820271 B2 JP5820271 B2 JP 5820271B2 JP 2011532338 A JP2011532338 A JP 2011532338A JP 2011532338 A JP2011532338 A JP 2011532338A JP 5820271 B2 JP5820271 B2 JP 5820271B2
- Authority
- JP
- Japan
- Prior art keywords
- retractor
- retractor assembly
- tissue
- tubular body
- cannula device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000012800 visualization Methods 0.000 title claims description 132
- 238000000034 method Methods 0.000 title description 93
- 230000007246 mechanism Effects 0.000 claims description 63
- 238000004891 communication Methods 0.000 claims description 18
- 238000004873 anchoring Methods 0.000 claims description 10
- 239000012780 transparent material Substances 0.000 claims description 10
- 230000007704 transition Effects 0.000 claims description 6
- 230000008261 resistance mechanism Effects 0.000 claims description 3
- 210000001519 tissue Anatomy 0.000 description 175
- 238000002560 therapeutic procedure Methods 0.000 description 59
- 239000000463 material Substances 0.000 description 50
- 206010061246 Intervertebral disc degeneration Diseases 0.000 description 36
- 238000003973 irrigation Methods 0.000 description 27
- 230000002262 irrigation Effects 0.000 description 27
- 238000005452 bending Methods 0.000 description 24
- 238000001574 biopsy Methods 0.000 description 23
- 238000003384 imaging method Methods 0.000 description 21
- 238000011282 treatment Methods 0.000 description 21
- 238000006073 displacement reaction Methods 0.000 description 20
- 238000003780 insertion Methods 0.000 description 19
- 230000037431 insertion Effects 0.000 description 19
- 230000003416 augmentation Effects 0.000 description 15
- 239000003814 drug Substances 0.000 description 15
- 208000018180 degenerative disc disease Diseases 0.000 description 14
- 230000006870 function Effects 0.000 description 14
- 208000021600 intervertebral disc degenerative disease Diseases 0.000 description 14
- 230000006837 decompression Effects 0.000 description 13
- 230000001537 neural effect Effects 0.000 description 13
- 239000012530 fluid Substances 0.000 description 12
- 210000005036 nerve Anatomy 0.000 description 11
- 210000000944 nerve tissue Anatomy 0.000 description 11
- 229940079593 drug Drugs 0.000 description 10
- 238000001802 infusion Methods 0.000 description 10
- 238000013459 approach Methods 0.000 description 9
- 230000000712 assembly Effects 0.000 description 9
- 238000000429 assembly Methods 0.000 description 9
- 210000000746 body region Anatomy 0.000 description 9
- 230000006378 damage Effects 0.000 description 9
- 208000003618 Intervertebral Disc Displacement Diseases 0.000 description 7
- 210000004369 blood Anatomy 0.000 description 7
- 239000008280 blood Substances 0.000 description 7
- 238000010586 diagram Methods 0.000 description 7
- 208000014674 injury Diseases 0.000 description 7
- 229920000642 polymer Polymers 0.000 description 7
- 239000000523 sample Substances 0.000 description 7
- 230000008733 trauma Effects 0.000 description 7
- 238000002604 ultrasonography Methods 0.000 description 7
- 230000002792 vascular Effects 0.000 description 7
- 210000000988 bone and bone Anatomy 0.000 description 6
- 238000002347 injection Methods 0.000 description 6
- 239000007924 injection Substances 0.000 description 6
- 229910052751 metal Inorganic materials 0.000 description 6
- 239000002184 metal Substances 0.000 description 6
- 230000008439 repair process Effects 0.000 description 6
- 230000000638 stimulation Effects 0.000 description 6
- 239000004575 stone Substances 0.000 description 6
- 206010050296 Intervertebral disc protrusion Diseases 0.000 description 5
- 230000002638 denervation Effects 0.000 description 5
- 239000000835 fiber Substances 0.000 description 5
- 238000002690 local anesthesia Methods 0.000 description 5
- 230000007935 neutral effect Effects 0.000 description 5
- 229920001296 polysiloxane Polymers 0.000 description 5
- 238000007789 sealing Methods 0.000 description 5
- 230000008093 supporting effect Effects 0.000 description 5
- 229940124597 therapeutic agent Drugs 0.000 description 5
- 230000000007 visual effect Effects 0.000 description 5
- -1 PEKEK Substances 0.000 description 4
- 208000002193 Pain Diseases 0.000 description 4
- 208000005228 Pericardial Effusion Diseases 0.000 description 4
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 4
- 238000002679 ablation Methods 0.000 description 4
- 238000004140 cleaning Methods 0.000 description 4
- 238000005345 coagulation Methods 0.000 description 4
- 230000015271 coagulation Effects 0.000 description 4
- 238000002574 cystoscopy Methods 0.000 description 4
- 238000010494 dissociation reaction Methods 0.000 description 4
- 230000005593 dissociations Effects 0.000 description 4
- 238000002594 fluoroscopy Methods 0.000 description 4
- 238000002513 implantation Methods 0.000 description 4
- 239000007788 liquid Substances 0.000 description 4
- 239000003550 marker Substances 0.000 description 4
- 210000003205 muscle Anatomy 0.000 description 4
- 230000036407 pain Effects 0.000 description 4
- 210000004912 pericardial fluid Anatomy 0.000 description 4
- 239000004033 plastic Substances 0.000 description 4
- 229920003023 plastic Polymers 0.000 description 4
- 239000011780 sodium chloride Substances 0.000 description 4
- 239000010935 stainless steel Substances 0.000 description 4
- 229910001220 stainless steel Inorganic materials 0.000 description 4
- 239000004677 Nylon Substances 0.000 description 3
- NIXOWILDQLNWCW-UHFFFAOYSA-N acrylic acid group Chemical group C(C=C)(=O)O NIXOWILDQLNWCW-UHFFFAOYSA-N 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 238000000576 coating method Methods 0.000 description 3
- 230000000295 complement effect Effects 0.000 description 3
- 230000007850 degeneration Effects 0.000 description 3
- 238000003745 diagnosis Methods 0.000 description 3
- 239000012634 fragment Substances 0.000 description 3
- 239000011521 glass Substances 0.000 description 3
- 229920001778 nylon Polymers 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 239000013307 optical fiber Substances 0.000 description 3
- 201000003144 pneumothorax Diseases 0.000 description 3
- 239000004417 polycarbonate Substances 0.000 description 3
- 229920000515 polycarbonate Polymers 0.000 description 3
- 229920000728 polyester Polymers 0.000 description 3
- 210000000273 spinal nerve root Anatomy 0.000 description 3
- 239000000126 substance Substances 0.000 description 3
- 238000001356 surgical procedure Methods 0.000 description 3
- 229910000684 Cobalt-chrome Inorganic materials 0.000 description 2
- JOYRKODLDBILNP-UHFFFAOYSA-N Ethyl urethane Chemical compound CCOC(N)=O JOYRKODLDBILNP-UHFFFAOYSA-N 0.000 description 2
- 206010016654 Fibrosis Diseases 0.000 description 2
- 208000027418 Wounds and injury Diseases 0.000 description 2
- WAIPAZQMEIHHTJ-UHFFFAOYSA-N [Cr].[Co] Chemical compound [Cr].[Co] WAIPAZQMEIHHTJ-UHFFFAOYSA-N 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 2
- 210000003484 anatomy Anatomy 0.000 description 2
- 230000002146 bilateral effect Effects 0.000 description 2
- 239000003795 chemical substances by application Substances 0.000 description 2
- 239000011248 coating agent Substances 0.000 description 2
- 239000010952 cobalt-chrome Substances 0.000 description 2
- 230000001427 coherent effect Effects 0.000 description 2
- 150000001875 compounds Chemical class 0.000 description 2
- 238000002591 computed tomography Methods 0.000 description 2
- 230000008602 contraction Effects 0.000 description 2
- 239000002872 contrast media Substances 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000002405 diagnostic procedure Methods 0.000 description 2
- 230000004761 fibrosis Effects 0.000 description 2
- 239000007789 gas Chemical group 0.000 description 2
- 238000005286 illumination Methods 0.000 description 2
- 238000011862 kidney biopsy Methods 0.000 description 2
- 238000002595 magnetic resonance imaging Methods 0.000 description 2
- 210000003516 pericardium Anatomy 0.000 description 2
- 229920000139 polyethylene terephthalate Polymers 0.000 description 2
- 239000005020 polyethylene terephthalate Substances 0.000 description 2
- 229920005644 polyethylene terephthalate glycol copolymer Polymers 0.000 description 2
- 239000004810 polytetrafluoroethylene Substances 0.000 description 2
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 2
- 229920002635 polyurethane Polymers 0.000 description 2
- 239000004814 polyurethane Substances 0.000 description 2
- 238000002271 resection Methods 0.000 description 2
- 230000000717 retained effect Effects 0.000 description 2
- 230000035807 sensation Effects 0.000 description 2
- 239000000243 solution Substances 0.000 description 2
- 239000000725 suspension Substances 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 210000000115 thoracic cavity Anatomy 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 230000000472 traumatic effect Effects 0.000 description 2
- 210000000626 ureter Anatomy 0.000 description 2
- 150000003673 urethanes Chemical class 0.000 description 2
- 206010002091 Anaesthesia Diseases 0.000 description 1
- 208000008035 Back Pain Diseases 0.000 description 1
- 208000010392 Bone Fractures Diseases 0.000 description 1
- 102000008186 Collagen Human genes 0.000 description 1
- 108010035532 Collagen Proteins 0.000 description 1
- 241001269524 Dura Species 0.000 description 1
- 239000004812 Fluorinated ethylene propylene Substances 0.000 description 1
- 206010017076 Fracture Diseases 0.000 description 1
- 229920002633 Kraton (polymer) Polymers 0.000 description 1
- 206010028604 Myocardial rupture Diseases 0.000 description 1
- 206010028980 Neoplasm Diseases 0.000 description 1
- 208000028389 Nerve injury Diseases 0.000 description 1
- 206010033799 Paralysis Diseases 0.000 description 1
- 239000004696 Poly ether ether ketone Substances 0.000 description 1
- 229920002614 Polyether block amide Polymers 0.000 description 1
- 239000004695 Polyether sulfone Substances 0.000 description 1
- 239000004697 Polyetherimide Substances 0.000 description 1
- 239000004698 Polyethylene Substances 0.000 description 1
- 229920002873 Polyethylenimine Polymers 0.000 description 1
- 239000004743 Polypropylene Substances 0.000 description 1
- 208000020307 Spinal disease Diseases 0.000 description 1
- 229910001069 Ti alloy Inorganic materials 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- HZEWFHLRYVTOIW-UHFFFAOYSA-N [Ti].[Ni] Chemical compound [Ti].[Ni] HZEWFHLRYVTOIW-UHFFFAOYSA-N 0.000 description 1
- 230000003187 abdominal effect Effects 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000001154 acute effect Effects 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000037005 anaesthesia Effects 0.000 description 1
- 229940035676 analgesics Drugs 0.000 description 1
- 239000012491 analyte Substances 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 239000000730 antalgic agent Substances 0.000 description 1
- 210000001367 artery Anatomy 0.000 description 1
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 1
- 230000003190 augmentative effect Effects 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- JUPQTSLXMOCDHR-UHFFFAOYSA-N benzene-1,4-diol;bis(4-fluorophenyl)methanone Chemical compound OC1=CC=C(O)C=C1.C1=CC(F)=CC=C1C(=O)C1=CC=C(F)C=C1 JUPQTSLXMOCDHR-UHFFFAOYSA-N 0.000 description 1
- 229920000249 biocompatible polymer Polymers 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 210000001124 body fluid Anatomy 0.000 description 1
- 210000000481 breast Anatomy 0.000 description 1
- 238000013276 bronchoscopy Methods 0.000 description 1
- 210000004027 cell Anatomy 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000012512 characterization method Methods 0.000 description 1
- 239000003153 chemical reaction reagent Substances 0.000 description 1
- 210000000038 chest Anatomy 0.000 description 1
- 210000000078 claw Anatomy 0.000 description 1
- 229920001436 collagen Polymers 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 210000002808 connective tissue Anatomy 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000005336 cracking Methods 0.000 description 1
- 238000000315 cryotherapy Methods 0.000 description 1
- 230000000593 degrading effect Effects 0.000 description 1
- 230000023753 dehiscence Effects 0.000 description 1
- 238000007435 diagnostic evaluation Methods 0.000 description 1
- 238000002059 diagnostic imaging Methods 0.000 description 1
- 239000010432 diamond Substances 0.000 description 1
- 229910003460 diamond Inorganic materials 0.000 description 1
- 230000010339 dilation Effects 0.000 description 1
- 238000002224 dissection Methods 0.000 description 1
- 210000001951 dura mater Anatomy 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000001861 endoscopic biopsy Methods 0.000 description 1
- 238000001125 extrusion Methods 0.000 description 1
- 210000000416 exudates and transudate Anatomy 0.000 description 1
- 239000004744 fabric Substances 0.000 description 1
- 210000004700 fetal blood Anatomy 0.000 description 1
- 238000002695 general anesthesia Methods 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 239000003102 growth factor Substances 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 230000002008 hemorrhagic effect Effects 0.000 description 1
- 230000023597 hemostasis Effects 0.000 description 1
- 230000002439 hemostatic effect Effects 0.000 description 1
- 239000000017 hydrogel Substances 0.000 description 1
- 230000002209 hydrophobic effect Effects 0.000 description 1
- 239000007943 implant Substances 0.000 description 1
- 230000001976 improved effect Effects 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
- 230000003447 ipsilateral effect Effects 0.000 description 1
- 210000003141 lower extremity Anatomy 0.000 description 1
- 210000004705 lumbosacral region Anatomy 0.000 description 1
- 210000001365 lymphatic vessel Anatomy 0.000 description 1
- 210000004379 membrane Anatomy 0.000 description 1
- 239000012528 membrane Substances 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 230000003387 muscular Effects 0.000 description 1
- 210000003739 neck Anatomy 0.000 description 1
- 230000008764 nerve damage Effects 0.000 description 1
- 229910001000 nickel titanium Inorganic materials 0.000 description 1
- 210000000287 oocyte Anatomy 0.000 description 1
- 239000001301 oxygen Substances 0.000 description 1
- 229910052760 oxygen Inorganic materials 0.000 description 1
- 230000001936 parietal effect Effects 0.000 description 1
- 230000007170 pathology Effects 0.000 description 1
- 230000037361 pathway Effects 0.000 description 1
- 229920009441 perflouroethylene propylene Polymers 0.000 description 1
- 238000000554 physical therapy Methods 0.000 description 1
- 229920001643 poly(ether ketone) Polymers 0.000 description 1
- 229920001652 poly(etherketoneketone) Polymers 0.000 description 1
- 229920003208 poly(ethylene sulfide) Polymers 0.000 description 1
- 229920006393 polyether sulfone Polymers 0.000 description 1
- 229920002530 polyetherether ketone Polymers 0.000 description 1
- 229920001601 polyetherimide Polymers 0.000 description 1
- 229920000573 polyethylene Polymers 0.000 description 1
- 229920000098 polyolefin Polymers 0.000 description 1
- 229920001155 polypropylene Polymers 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
- 210000002307 prostate Anatomy 0.000 description 1
- 239000010453 quartz Substances 0.000 description 1
- 238000002601 radiography Methods 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000037390 scarring Effects 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
- 239000007779 soft material Substances 0.000 description 1
- 210000004872 soft tissue Anatomy 0.000 description 1
- 238000001179 sorption measurement Methods 0.000 description 1
- 210000001032 spinal nerve Anatomy 0.000 description 1
- 208000005198 spinal stenosis Diseases 0.000 description 1
- 229920006132 styrene block copolymer Polymers 0.000 description 1
- 208000024891 symptom Diseases 0.000 description 1
- 229910052715 tantalum Inorganic materials 0.000 description 1
- GUVRBAGPIYLISA-UHFFFAOYSA-N tantalum atom Chemical compound [Ta] GUVRBAGPIYLISA-UHFFFAOYSA-N 0.000 description 1
- 239000010936 titanium Substances 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 1
- 239000010937 tungsten Substances 0.000 description 1
- 229910052721 tungsten Inorganic materials 0.000 description 1
- 210000001364 upper extremity Anatomy 0.000 description 1
- 210000003462 vein Anatomy 0.000 description 1
- 230000009278 visceral effect Effects 0.000 description 1
- 238000005406 washing Methods 0.000 description 1
- 210000002517 zygapophyseal joint Anatomy 0.000 description 1
Images













































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Other methods or instruments for diagnosis, e.g. instruments for taking a cell sample, for biopsy, for vaccination diagnosis; Sex determination; Ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
- A61B10/06—Biopsy forceps, e.g. with cup-shaped jaws
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3417—Details of tips or shafts, e.g. grooves, expandable, bendable; Multiple coaxial sliding cannulas, e.g. for dilating
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/313—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for introducing through surgical openings, e.g. laparoscopes
- A61B1/3135—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for introducing through surgical openings, e.g. laparoscopes for examination of the epidural or the spinal space
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/02—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors
- A61B17/0218—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00238—Type of minimally invasive operation
- A61B2017/00261—Discectomy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00902—Material properties transparent or translucent
- A61B2017/00907—Material properties transparent or translucent for light
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B2017/320064—Surgical cutting instruments with tissue or sample retaining means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3417—Details of tips or shafts, e.g. grooves, expandable, bendable; Multiple coaxial sliding cannulas, e.g. for dilating
- A61B2017/3419—Sealing means between cannula and body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0082—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes
- A61B5/0084—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes for introduction into the body, e.g. by catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/12—Diagnosis using ultrasonic, sonic or infrasonic waves in body cavities or body tracts, e.g. by using catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Veterinary Medicine (AREA)
- General Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Biodiversity & Conservation Biology (AREA)
- Surgical Instruments (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Radiology & Medical Imaging (AREA)
- Neurology (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Optics & Photonics (AREA)
Description
本願は、米国仮特許出願第61/106,914号(2008年10月20日出願)の米国特許法第119条第(e)項の優先権の利益を主張し、この出願の開示は、その全体が本明細書に参考として援用される。本願は、また、米国特許出願第12/199,706号(2008年8月27日出願)に関連し、この出願は、その全体が本明細書に参考として援用される。
損傷した椎間板は、一般的に、相当な治療期間の床上安静、理学療法、活動の変更、および鎮痛剤によって治療される。損傷した椎間板を修復し、損傷した椎間板の外科的除去を回避しようとする多くの治療が存在する。例えば、椎間板除圧術は、髄核を摘出するかまたは収縮させることにより、繊維輪および神経への圧力を減圧および減少させるために使用される手技である。より侵襲性の低い顕微鏡下腰椎椎間板摘出術および自動経皮的腰椎椎間板摘出術は、繊維輪内に横方向に挿入した針を通して吸引することにより椎間板の髄核を摘出する。別の手技は、椎間板の変性を治療、遅延、または予防するために、椎間板増強デバイスを移植することを有する。増強とは、(1)椎間板ヘルニアの修復、損傷した繊維輪の支持、および繊維輪断裂の閉鎖を含む繊維輪の増強と、(2)髄核への材料の付加または除去を含む髄核の増強の両方を意味する。観血的アプローチを含む従来の治療デバイスおよび技術の多くは、蛍光透視による誘導下で椎間板の一部を穿刺するために筋肉の切開または経皮的手技を有するが、直接的可視化を用いない。いくつかの治療もまた、推測される損傷領域に薬物を注射すること、または癒着を溶解させることによって、椎間板起因の疼痛を減少させようとする。しかしながら、これらのデバイスもまた、外科医にとっての触覚、または、外科医が周囲の組織を傷付けることなく操作できるという点においては、提供するものはほとんどない。一般に、これらの従来システムは、椎間板に到達するためには外部からの可視化に依存するので、任意の種類のリアルタイムの搭載型可視化能力を持たない。
本発明は、たとえば、以下の項目も提供する。
(項目1)
管状体であって、該管状体の遠位端に位置する開創器アセンブリを有する管状体を備え、該開創器アセンブリは、第1の閉鎖構成と、第2の開放構成とを備え、該管状体は、内視鏡システムを保持するように構成される少なくとも1つの内腔を備える、開創器カニューレデバイス。
(項目2)
内視鏡システムをさらに備える、項目1に記載のデバイス。
(項目3)
前記開創器アセンブリは、湾曲表面を備える少なくとも1つの可動要素を備える、項目1に記載のデバイス。
(項目4)
各可動要素の前記湾曲表面は、前記開創器カニューレデバイスの縦軸の周囲に均一に配向されることにより、前記第1の閉鎖構成において、概して曲線状先端を形成する、項目3に記載のデバイス。
(項目5)
各可動要素の前記湾曲表面は、前記開創器カニューレデバイスの縦軸の周囲に不均一に配向されることにより、前記第1の閉鎖構成において、先細先端を形成する、項目3に記載のデバイス。
(項目6)
少なくとも1つの可動要素の前記湾曲表面は、前記開創器カニューレデバイスの縦軸の周囲に、不均一および非対称的に配向されることにより、角度付き先端を形成する、項目3に記載のデバイス。
(項目7)
前記角度付き先端は、前記開創器アセンブリの縦方向中線を横断して配向される、項目6に記載のデバイス。
(項目8)
前記開創器アセンブリは、少なくとも2つの可動要素を備える、項目4に記載のデバイス。
(項目9)
前記開創器アセンブリは、少なくとも2つの可動要素を備える、項目5に記載のデバイス。
(項目10)
前記デバイスの縦軸に垂直な前記開創器アセンブリの断面は、非円形構成を備える、項目3に記載のデバイス。
(項目11)
前記デバイスの縦軸に垂直な前記開創器アセンブリの断面は、少なくとも1つの線状の領域を備える、項目3に記載のデバイス。
(項目12)
前記湾曲表面は、第1の接線を有する第1の点と、該第1の接線に垂直な第2の接線を有する第2の点とを備える、項目3に記載のデバイス。
(項目13)
前記先細先端は、線状の先細領域を備える、項目5に記載のデバイス。
(項目14)
前記少なくとも1つの可動要素は、光学的に透明な材料を備える、項目3に記載のデバイス。
(項目15)
前記デバイスは、光学的に透明な材料を含む少なくとも1つの定着要素をさらに備える、項目14に記載のデバイス。
(項目16)
前記第1の閉鎖構成において、前記少なくとも1つの可動要素と前記少なくとも1つの定着要素とは、側部開口を形成する、項目15に記載のデバイス。
(項目17)
前記少なくとも1つの定着要素は、前記管状体の遠位にあり、前記デバイスの縦軸と平行に配向される、項目15に記載のデバイス。
(項目18)
前記管状体の近位端にハンドルをさらに備える、項目1に記載のデバイス。
(項目19)
前記ハンドルは、旋回部材と、デバイス係止機構とを備える、項目17に記載のデバイス。
(項目20)
前記ハンドルは、前記旋回部材の移動を制限するように構成される、旋回部材係止部をさらに備える、項目18に記載のデバイス。
(項目21)
前記ハンドルは、前記旋回部材の作動力を設定する抵抗機構をさらに備える、項目18に記載のデバイス。
(項目22)
前記ハンドルは、前記旋回部材に対して偏向力を付与するように構成される偏向部材をさらに備える、項目18に記載のデバイス。
(項目23)
前記デバイス係止機構は、内視鏡システムを固定するように構成される、項目19に記載のデバイス。
(項目24)
前記ハンドルは、1つ以上のポートを備える、項目18に記載のデバイス。
(項目25)
少なくとも1つのポートは、洗浄ポートとして構成される、項目24に記載のデバイス。
(項目26)
少なくとも1つのポートは、前記内視鏡システムを保持するように構成される前記少なくとも1つの内腔と連通している可視化ポートである、項目24に記載のデバイス。
(項目27)
前記少なくとも1つの可動要素は、凸状外側表面を備える、項目3に記載のデバイス。
(項目28)
前記少なくとも1つの可動要素は、凹状内側表面を備える、項目27に記載のデバイス。
(項目29)
前記内視鏡システムを保持するように構成される前記少なくとも1つの内腔は、該内視鏡システムを取外し可能に受容するように構成されている、項目1に記載のデバイス。
(項目30)
身体部位に最小侵襲的にアクセスする方法であって、
開創器アセンブリを管状体に提供することであって、該開創器アセンブリは、該管状体の遠位端に位置し、該管状体の遠位端から遠位に突出し、該開創器アセンブリは、閉鎖構成と、開放構成とを有し、該管状体は、内視鏡を保有するように構成される視認内腔と、該視認内腔の遠位にある作業空間とを備える、ことと、
身体内の非血管標的部位に向かって該管状体を挿入することと、
該身体内にある間、該開創器アセンブリを該開放構成へと付勢することと、
該管状体から該開創器アセンブリの内腔を通して、該非血管標的部位を可視化することと
を含む、方法。
(項目31)
内視鏡デバイスを前記管状体内に挿入することをさらに含む、項目30に記載の方法。
(項目32)
非神経構造と接触している神経構造に向かって、前記管状体の遠位端を前進させることをさらに含む、項目30に記載の方法。
(項目33)
前記開創器アセンブリを使用して、前記神経構造を前記非神経構造から変位させることをさらに含む、項目32に記載の方法。
(項目34)
前記非血管標的部位によって、前記開創器アセンブリの作業空間を配向することをさらに含む、項目33に記載の方法。
(項目35)
脊椎内の椎間板変性を治療する方法であって、
直接的可視化能力を有する開創器カニューレデバイスを脊椎の一部の中に導入することであって、該カニューレは、内視鏡を封入するように構成される少なくとも1つの内腔を含有する、ことと、
組織の可視化および変位を促進させるために、該開創器カニューレを開放構成へと付勢して、前方視能力を創出することと、
椎間板変性を治療するために、療法デバイスを該開創器カニューレデバイスの中に導入することと、
を含む、方法。
(項目36)
前記療法デバイスは、前記脊椎の椎間板繊維輪に構造的支持を提供する、項目35に記載の方法。
(項目37)
前記療法デバイスは、断裂繊維輪を封着する、項目35に記載の方法。
(項目38)
前記療法デバイスは、髄核に付加的材料を付加する、項目35に記載の方法。
(項目39)
身体の脊椎内の椎間板変性を治療する方法であって、
該身体の皮膚に切開を生成することと、
直接的可視化構成要素を有する開創器カニューレデバイスを該脊椎の一部の中に導入することと、
組織の可視化および変位させることを促進するために、該開創器カニューレを開放構成へと付勢して、前方視能力を創出することと、
椎間板変性を治療するために、療法デバイスを開創器カニューレデバイス内に導入することと、
該椎間板変性を治療することと
を含む、方法。
(項目40)
椎間板変性を治療する方法であって、
直接的可視化能力を有する開創器カニューレデバイスを脊椎の一部の中に導入することと、
該開創器カニューレデバイスによって提供される可視化情報を使用して、該椎間板または神経組織の外側表面に隣接する位置に、該開創器カニューレデバイスを誘導することと、
作業領域を創出するために、該開創器カニューレデバイスの一部によって、該神経組織または他の組織を変位させることと、
椎間板変性を治療する療法デバイスを送達するために、該開創器カニューレデバイスを使用することと、
該椎間板変性を治療することと
を含む、方法。
(項目41)
前記療法デバイスは、髄核、繊維輪、または分裂区画の一部を除去する髄核減圧デバイスである、項目40に記載の方法。
(項目42)
前記療法デバイスは、前記髄核または繊維輪の一部を収縮させる、項目40に記載の方法。
(項目43)
前記椎間板変性を治療することは、椎間板ヘルニアを修復することを含む、項目40に記載の方法。
(項目44)
前記椎間板変性を治療することは、断裂繊維輪を支持することを含む、項目40に記載の方法。
(項目45)
前記椎間板変性を治療することは、繊維輪を封着することを含む、項目40に記載の方法。
(項目46)
前記椎間板変性を治療することは、髄核または繊維輪に材料を付加することを含む、項目40に記載の方法。
(項目47)
前記組織を変位させることは、前記開創器カニューレデバイスの顎部を開放することを含む、項目40に記載の方法。
開創器カニューレデバイスは、可視化/撮像、吸引、潅注、薬物注入、脊椎椎間板増強、髄核減圧、焼灼、移植等のためのデバイス等、デバイスおよび療法を送達するために使用されてもよい。図1および2は、近位端104および遠位端106を有する管状体102と、開創器アセンブリ116と、ハンドル118とを備え得る開創器カニューレデバイスの一実施形態100を図示する。管状体102の近位端は、ハンドル118を介して、1つ以上のポート108、110、112、および114に関連し得る。遠位端106は、開創器アセンブリ116に連結されてもよく、その一実施例は、図2に示される。開創器アセンブリ116は、遠位端106の撓曲を可能にするように構成される、可撓性領域124を介して、管状体102に連結されてもよい。開創器アセンブリ116(その実施例は、以下に詳述される)は、デバイスの挿入および移動ならびに標的身体領域の直接的可視化のための作業空間を創出するために使用されてもよい。空間は、例えば、周囲組織、構造、または解剖学的特徴を解離、変形、操作、固定、または非外傷的に変位させることによって、創出されてもよい。開創器アセンブリ116は、2つ以上の構成、例えば、開放構成および閉鎖構成を有してもよい。いくつかの実施形態では、開創器アセンブリは、標的身体領域への開創器カニューレデバイスのナビゲーションを容易にし得るガイド要素、例えば、ガイドワイヤ上を前進されるように構成されてもよい。ポート108、110、112、および114は、管状体内の1つ以上の内腔またはチャネルを介して、開創器アセンブリ116の1つ以上のチャネルと連通していてもよく、流体または材料の注入/排水/吸着、内視鏡、光ファイバ、または可視化デバイスの挿入/除去または支持、開創器アセンブリの開放/閉鎖、ならびに他の器具またはツールの挿入あるいは除去もしくは支持を含むが、それらに限定されない種々の使用のいずれかのために構成されてもよい。開創器アセンブリ116による、標的身体領域を囲繞する組織の非外傷的変位は、デバイス100内に位置する内視鏡または他の可視化アセンブリからの周囲構造の画角を増加させ、また、例えば、内視鏡からある焦点距離だけ構造を変位させることによって、内視鏡によって撮影される画像を改善することに有用であり得る。
開創器カニューレデバイス100は、異なる方法において、標的身体領域を操作するために使用されてもよい。例えば、開創器カニューレデバイスは、組織を拡張および/または変位させ、作業空間を創出する、標的組織を吸引および/または灌注する、薬物を注射する、物質を注入する、組織を除去する等のために使用されてもよい。さらに、開創器カニューレデバイスは、種々のデバイス、例えば、任意の可視化デバイス(例えば、内視鏡)、焼灼デバイス、拡張可能デバイス、熱エネルギーデバイス、刺激電極等を標的組織に送達するために使用されてもよい。異なる開創器アセンブリが、開創器カニューレデバイスと併用され、上述の機能のうちの1つ以上を有効にしてもよい。例えば、開創器アセンブリは、1つ以上の開創器要素、例えば、顎部を有してもよく、異なる機能、例えば、開放構成および閉鎖構成を果たすために、1つ以上の構成を有してもよい。開創器アセンブリを閉鎖から開放構成に遷移させることによって、開創器アセンブリの開創器要素は、周囲組織に対して外向きに付勢され、直接的可視化および/または付加的デバイスの挿入のための空間を提供してもよい。いくつかの変形例では、非外傷的開創器アセンブリは、閉鎖と開放構成との間を循環し、開創器カニューレデバイスの前進を補助してもよい。ある場合には、開創器アセンブリの動作は、内視鏡からの画像等、直接的可視化の補助とともに生じてもよい。非外傷的開創器アセンブリのいくつかの変形例は、開創器カニューレデバイスの管状体内の1つ以上のチャネルまたは内腔と連通する、作業チャネルを備えてもよい。縦方向内腔またはアクセス内腔、例えば、図13Aのチャネル1326、1328、および1330は、管状体の長さを通して延在してもよく、開創器アセンブリと連通していてもよい。これらのチャネルは、カテーテル、内視鏡、および器具/デバイス等の通過を可能にするように寸法設定されてもよい。
開創器アセンブリの一実施形態は、図3Aから3Fに示される。開創器アセンブリ300の上方図は、図3Aに示され、開創器アセンブリ300の側面図は、図3Bに示され、斜視図は、図3Eに示される。ここに図示されるように、開創器アセンブリ300は、閉鎖構成にあるとき、顎部308および310が嵌合し、弾丸に類似する実質的に平滑な曲線形状を形成するように成形され、表面の曲率が、管状体102の中線399の周囲において均一である、2つの開創器要素である顎部308および310を備える。顎部308および310の表面は、遠位部分302において嵌合するように、対称に湾曲していてもよい。加えて、または代替として、開創器アセンブリの実施形態は、パドル、フラップ、ローブ、タブ、顎部等の1つ以上の開創器要素を備えてもよい。開創器アセンブリ300は、上述のように、球形、ドーム形、先細楕円形状、または周囲組織への外傷を低減させることに有用となり得る、任意の他の形状等、1つ以上の湾曲表面を伴って成形される顎部を有してもよい。曲線状開創器アセンブリは、図3Aおよび3Bに示され、顎部308および310は、それぞれ、図3Fに図示されるように、半球として成形される。図3Fは、内側縁309を有する顎部308の拡大図である(顎部310および内側縁311は、図示されるように、顎部308の鏡映である)。また、後述される、他の非外傷的幾何学形状が使用されてもよい。
開創器アセンブリ401の別の実施形態は、図4Aから4Fに図示される。開創器アセンブリ401は、2つの開創器要素である顎部408および410を備える。加えて、または代替として、開創器アセンブリの実施形態は、パドル、フラップ、ローブ、タブ、顎部等の1つ以上の開創器要素を備えてもよい。顎部408および410は、中線499の周囲において不均一である曲率を有する。図4Aおよび4Bに示されるように、顎部408は、縦軸、例えば、中線499に沿って、1つ以上の勾配または角度を伴って、先細である。図4Aの上方図に示されるように、開創器アセンブリ401は、顎部408の第1のプロファイル上に第1の曲率を有し、第1の曲率は、遠位部分402に向かって、概して平滑および曲線状である第1の先細部と、遠位部分402において曲線状である第2の先細部とを有する。図4Bは、顎部408が、遠位部分402に向かって先細となり得る、例えば、顎部408の先細部が、近位に平坦であって、遠位に急勾配であり得る場合を示す拡大図である。図4Cは、図4Aおよび4Bに示される図に垂直な開創器アセンブリ401の側面図を図示する。ここに示されるように、顎部408および410の表面曲率は、開創器アセンブリ401の上方図からみた場合の表面曲率と異なる、すなわち、顎部表面の曲率は、中線499の周囲において不均一である。側面図から、開創器アセンブリ401は、図4Aおよび4Bに示される第1のプロファイルと比較して、第2のプロファイルに沿って、より段階的または均一の先細を有する。これは、図4Eおよび4Fからも分かるであろう。顎部408および410は、少なくとも2つの異なる湾曲表面(例えば、上方図から分かる第1の先細表面、および上方図に垂直な側面図から分かる第2の先細表面)を有するが、他の実施形態では、断面または側方プロファイルは、上方プロファイルからの先細部より先細であるか、またはそれより先細でなくてもよく、顎部408および410の先細部は、近位に増加し、および/または遠位に減少してもよい。他の実施形態では、任意の先細または非先細構成が、使用されてもよい。顎部408および410は、2つの直交する顎部表面上に対称な先細部を有してもよいが、他の顎部変形例は、2つを超える顎部表面(直交または直交していなくてもよい)上に対称な先細部を有してもよく、および/または、標的組織環境を通して、非外傷的にナビゲートするために好適な非対称な先細部を有してもよい。本特定の実施例では、顎部408および410は、鋭角を有する断面プロファイル(図4F参照)を有し、頂部は、図4Cに示されるように、閉鎖構成において、平坦な先細先端404を形成する。
開創器アセンブリのある実施形態では、顎部は、形状または移動において、デバイスの中線を中心として対称でなくてもよい。図22A−22Cは、開放構成における角度付き開創器アセンブリ2200を図示しており、角度付き開創器アセンブリ2200は、角度2203を有する第1の顎部2208と、角度を有さない第2の顎部2210とを備える。いくつかの実施形態では、第2の顎部2210は、任意であってもよい。第1の顎部2208は、曲線状先端2204を備えてもよく、曲線状先端2204の形状は、曲線状先端空洞2212が、その中に提供されるようなものである。角度2203は、1度〜180度、例えば、約150度〜約179度、または約100度〜約130度、または約120度〜約160度、または約90度〜約120度の任意の角度を有してもよい。上述のように、角度付き開創器アセンブリ2200は、ここでは、その開放構成において示されている。その閉鎖構成に作動させられると、第1の顎部2208の少なくとも一部、例えば、曲線状先端2204は、中線2207を越えて延在してもよい。これは、開創器アセンブリ2200が、曲線状先端2204において、組織を把持および/または係着することに有用となり得る。組織が係合される程度は、後述されるように、他の特徴とともに、角度2203を変更することによって調節されてもよい。いくつかの変形例では、中線2207を越えた第1の顎部2208の延在は、開創器アセンブリ2200に収まらず、閉鎖構成においてさえ、管状体2202の1つ以上の内腔内の流体またはデバイスが、依然として、開創器アセンブリ2200から出る状態であってもよい。例えば、閉鎖構成では、第1の顎部2208および第2の顎部2210は、側部開口を形成してもよく、単一顎部を有する変形例では、顎部2209は、管状体2202とともに側部開口を形成してもよい。第1の顎部2208の形状は、第1の顎部空洞2209が、その中に含有されるようなものであって、図22Bに図示されるように、第1の顎部空洞2209および曲線状先端空洞2212は、相互に連通していてもよい。また、曲線状先端2204は、図22Cから分かるように、洗浄溶液または造影剤を注入するために使用され得る曲線状先端孔2214を有してもよい。作業空間2230は、概して、第1の顎部2208と第2の顎部2210との間の領域として画定されてもよく、曲線状先端空洞2212および第1の顎部空洞2209、ならびに組織を拡張させることに伴って、開創器アセンブリ2200によって創出される、任意の付加的空間を含んでもよい。
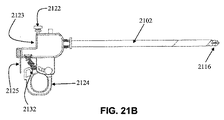
上述のように、開創器アセンブリは、組織の非外傷的操作およびそれを通してのナビゲーションのために、必要に応じて任意のサイズまたは幾何学形状をとり得る、1つ以上の開創器要素、例えば、顎部を有してもよい。開創器アセンブリを作動させるための機構の実施例が、上述されているが、他の機構が、種々の機能のための種々の構成において、開創器アセンブリを配置するために使用されてもよい。ある実施形態では、開創器アセンブリを作動させる機構は、一方の構成、または他方、あるいは第3の構成に向かって偏向されてもよい。例えば、顎部または開創器要素は、作動力の不在の下において、開創器アセンブリが閉鎖構成のままで作動させられると、開放構成をとるように閉鎖構成に向かって偏向されてもよい。閉鎖構成に向かう偏向を有する開創器アセンブリは、例えば、除去または置換のために、組織を操作および/または把持するために使用されてもよい。他の実施形態では、開創器部材は、作動力の不在の下において、開創器アセンブリが、開放構成のままであって、作動させられると、閉鎖構成をとるように開放構成に向かって偏向されてもよい。開放構成に向かう偏向を有する開創器アセンブリは、例えば、拡張器として使用されるか、あるいは組織または構造を変位させてもよい。種々の偏向機構が、当技術分野において一般的であるように、利用されてもよく、例えば、バネが、開創器部材を特定の構成に維持するために使用されてもよい(例えば、図21Bに示される偏向バネ2132)が、力は、バネ力を克服し、開創器部材を代替構成に遷移させるように印加されてもよい。バネまたは他の偏向部材は、1つ以上の顎部部材に直接作用してもよく、またはデバイスの近位筐体内に位置する作動装置に作用してもよい。当然ながら、ある実施形態は、構成に対する偏向を欠いていてもよい。いくつかの実施形態では、開創器アセンブリは、1つ以上の構成に解放可能に係止可能であってもよい。例えば、顎部は、その内側縁間に、約60、約90、約120、約180、または約270度を含むが、それらに限定されない、約0〜約180度以上の種々の角度付き位置に係止可能であってもよい。各開創器部材の移動範囲は、同一または異なってもよい。開創器アセンブリのある実施例では、1つ以上の開創器要素は、固定位置を有してもよい一方、1つ以上の他の開創器要素は、可動であってもよい。例えば、図4Dを参照すると、両方の顎部408および410が、可動または旋回可能であって、内側縁の間に角度を創出するが、しかしながら、他の実施形態では、顎部のいずれかは、固定位置を有してもよい一方、他の顎部は、可動であることを理解されたい。図22Aを参照すると、顎部2210は、所与の場所に固定されてもよく、顎部2208は、蝶番2206を中心として旋回し、所望の構成を得てもよい。
上述のように、開創器カニューレデバイスの1つ以上の実施形態は、図1に図示される誘導機構120等、種々の誘導構成のいずれかを具備してもよい。一実施形態では、開創器カニューレデバイスは、2つの軸を備えるデバイスを含み、1つ以上の軸において誘導可能である。いくつかの実施形態では、1つの軸は、回転軸であってもよい。別の実施形態では、開創器カニューレデバイスは、誘導不可能である。さらに別の代替実施形態では、開創器カニューレデバイスは、脊椎の領域または身体の他の領域の一部にアクセスするように適合される、形状に予め形成されてもよい。形状は、特定の身体部位にアクセスするために、種々の角度付きおよび/または湾曲区分のいずれかを含んでもよい。さらに別の実施形態では、開創器カニューレデバイスは、開創器カニューレが、脊椎空間内で最大約360°の誘導能力を有し得るように、トロカール内に位置する。誘導機構、例えば、誘導機構120は、開創器カニューレデバイス100上に1つ以上の可撓性本体または可撓性領域124を含んでもよい。可撓性本体は、筐体118上に位置するレバー122等の制御部を操作することによって屈曲させられてもよい。誘導機構および屈曲領域124の種々の実施例は、以下に詳述される。
(1.可撓性領域)
上述のように、開創器アセンブリは、管状体と連結されてもよく、管状体は、標的身体領域内の開創器アセンブリの配置を制御するために使用されてもよい。管状体は、組織構造が、その中に挿入される任意の器具またはデバイスの周囲で崩壊する傾向にある、例えば、椎間板、硬膜外作業領域等、身体の解剖学的密集領域内において、開創器カニューレデバイスを操縦可能にするある特徴を備えてもよい。上述のように、開創器アセンブリ、例えば、開創器アセンブリ300および401は、図1および2に示されるように、誘導機構120によって制御され得る管状体、例えば、管状体102に直接連結されてもよい。ここに図示されるように、管状体102は、可撓性領域124を備える。いくつかの実施形態では、開創器アセンブリは、別個の可撓性構成要素によって、管状体102に連結されてもよい。管状体の屈曲範囲は、特定の設計に応じて可変であってもよい。開創器カニューレデバイスは、管状シャフトの中立位置に対して、片側または両側の屈曲範囲を伴って構成されてもよい。屈曲範囲は、約0度〜約135度であってもよい一方、他の実施形態では、屈曲範囲は、約0度〜約90度、時として、約0度〜約45度、またある時には、約0度〜約15または約20度であってもよい。他方の側の屈曲範囲は、該当する場合、第1の側より小さいか、同等であるか、またはそれ以上であってもよい。いくつかの実施形態では、屈曲角度の増加によって、管状シャフト内の1つ以上のチャネルを閉塞し得る、管状シャフトの折目または伸縮を生じさせてもよい。
上述のように、1つ以上の内腔またはチャネルが、開創器カニューレデバイスの管状体内に提供されてもよい。内腔および/またはチャネルは、種々の機能、例えば、可視化、解離、拡張、変位、吸引、潅注、薬物の注入、椎間板等の組織の増強、椎間板髄核等の組織の減圧、焼灼、刺激、デバイスの移植、および任意の他の所望の機能のために、デバイスおよび療法剤の送達のために使用されてもよい。図12Aおよび12Bに図示される一実施形態、例えば、管状体102は、開創器要素を伴わずに、2つのチャネル、例えば、管状体102の遠位端106で開放する可視化チャネル128およびチャネル130を示すように図示されている。他の実施形態では、しかしながら、管状体は、図13A−13Cおよび14の実施例に示されるように、異なる数のチャネル、あるいは異なる位置、断面領域、または断面形状を有するチャネルを含有してもよい。図12Aおよび12Bを参照すると、可視化チャネル128は、内視鏡チャネルとして、撮像デバイスを送達するために使用されてもよい一方、チャネル130は、1つ以上の器具の挿入のための作業チャネルとして使用されてもい。また、管状体102の内腔の少なくとも一部を封入し、可視化チャネル128およびチャネル130の少なくとも一部を封入し得る、内腔132が示される。1つ以上のチャネルは、管状体102の長さに実質的に及ぶ、縦方向長さを有してもよいが、他のチャネルは、管状体102より短い長さを有してもよく、遠位端106の近位で終端してもよい。また、他のチャネルは、例えば、カニューレデバイスの屈曲または他の移動を制御するために使用されてもよい。1つ以上のチャネルは、PTFEおよび種々の生体適合性潤滑コーティング材料のいずれかを含む、チャネル内の器具の摺動を容易にするための層またはコーティングを備えてもよい。いくつかの実施形態では、シャフトは、剛性または半剛性材料を備えてもよいが、他の実施形態では、可撓性材料を備えてもよい。
上述のように、開創器カニューレデバイスは、管状体および開創器アセンブリのナビゲーションならびに使用を制御するために、ハンドル、例えば、ハンドル118を具備してもよい。また、ハンドルは、種々の機能ポートと管状体の縦方向チャネルおよび/または内腔との間のインターフェースとしての役割を果たしてもよく、管状体のチャネルおよび内腔は、開創器アセンブリのチャネルおよび内腔と連通していてもよい。次に、図16を参照すると、管状体362の近位端360は、それぞれ、開創器カニューレデバイス1600の1つ以上のチャネルおよびコネクタ374、376、378、380、ならびに382に対応する、1つ以上の管区間364、366、368、370、372に連結されてもよい。図16に記載されるように、デバイス382の作業チャネルに接続される管区間370管区間368等の別の管区間と連通していてもよい。本特定の管区間370は、例えば、中央ポート378および管区間368を通してアクセスされるデバイス382の作業チャネル内に挿入される流体または材料を洗浄あるいは吸引するために使用されてもよい。管区間の特定の設計特徴は、特定の機能に応じて、可変であってもよい。特定の管区間に連結されるコネクタは、種々のコネクタまたは器具インターフェースのいずれかを備えてもよい。いくつかの実施形態では、例えば、1つ以上のコネクタは、ルアロック等の標準コネクタを備えてもよい一方、他の実施形態では、コネクタは、非標準コネクタであってもよい。特定のチャネルに応じて、いくつかの実施形態では、デバイスから流体の逆流を抑止するために、逆止弁、隔壁、または止血弁が提供されてもよい。その寸法および可撓性または剛性を含む、特定のチャネルの特性は、その特定の用途に応じてもよい。図17では、例えば、開創器カニューレデバイス1700は、5つのポート386、388、390、392、および394を備え、より長い可撓性ポート388および392は、注入または吸引のために使用されてもよい。そのようなポートは、注射器等の大型要素の取着を容易するために有益となり得る。ポート390等の剛性ポートは、そうでなければ損傷され得るか、または、より大きな摩擦抵抗を示し得る管を通過することが困難であるような、器具に対してに提供されてもよい。
開創器カニューレデバイスは、身体上の種々の手技において行われ得る種々の機能のために使用されてもよい。開創器カニューレデバイスは、可視化、解離、拡張、変位、吸引、潅注、薬物の注入、椎間板等の組織の増強、椎間板髄核等の組織の減圧、焼灼、刺激、デバイスの移植、および任意の他の所望の機能のために使用されてもよい。そのようなデバイスは、組織生検、椎間板増強、髄核減圧、髄核焼灼等の医療手技において、ならびに椎間板ヘルニアの修復のため、および椎間板変性の診断のために使用されてもよい。椎間板繊維輪を構造的に支持する、髄核または繊維輪の一部を収縮する、あるいは繊維輪を封着ためのデバイスの移植等、他の手技も、上述のデバイスおよび構成要素のうちの1つ以上を使用してもよい。
Claims (29)
- 開創器カニューレデバイスであって、該デバイスは、管状体を備え、該管状体は、該管状体の遠位端に位置する開創器アセンブリを有し、該管状体は、縦方向中線を有し、該開創器アセンブリは、最遠位部分を含む遠位先端を有する少なくとも1つの可動要素を含み、該開創器アセンブリは、第1の閉鎖構成と、第2の開放構成とを備え、該管状体は、内視鏡システムを保持するように構成される少なくとも1つの内腔を備え、該少なくとも1つの可動要素のうちの第1の可動要素の該遠位先端の該最遠位部分は、該開創器アセンブリが該第1の閉鎖構成から該第2の開放構成へと遷移するときに該管状体の該縦方向中線を通過する、デバイス。
- 内視鏡システムをさらに備える、請求項1に記載のデバイス。
- 前記少なくとも1つの可動要素は、湾曲表面を備える、請求項1に記載のデバイス。
- 前記少なくとも1つの可動要素の各々の前記湾曲表面は、前記開創器カニューレデバイスの縦軸の周囲に均一に配向されることにより、前記第1の閉鎖構成において、概して曲線状先端を形成する、請求項3に記載のデバイス。
- 前記少なくとも1つの可動要素の各々の前記湾曲表面は、前記開創器カニューレデバイスの縦軸の周囲に不均一に配向されることにより、前記第1の閉鎖構成において、先細先端を形成する、請求項3に記載のデバイス。
- 前記少なくとも1つの可動要素のうちの第1の可動要素の前記湾曲表面は、前記開創器カニューレデバイスの縦軸の周囲に、不均一および非対称的に配向されることにより、角度付き先端を形成する、請求項3に記載のデバイス。
- 前記角度付き先端は、前記開創器アセンブリの縦方向中線を横断して配向される、請求項6に記載のデバイス。
- 前記開創器アセンブリは、少なくとも2つの可動要素を備える、請求項4に記載のデバイス。
- 前記開創器アセンブリは、少なくとも2つの可動要素を備える、請求項5に記載のデバイス。
- 前記デバイスの縦軸に垂直な前記開創器アセンブリの断面は、非円形構成を備える、請求項3に記載のデバイス。
- 前記デバイスの縦軸に垂直な前記開創器アセンブリの断面は、少なくとも1つの線状の領域を備える、請求項3に記載のデバイス。
- 前記湾曲表面は、第1の接線を有する第1の点と、該第1の接線に垂直な第2の接線を有する第2の点とを備える、請求項3に記載のデバイス。
- 前記先細先端は、線状の先細領域を備える、請求項5に記載のデバイス。
- 前記少なくとも1つの可動要素は、光学的に透明な材料を備える、請求項3に記載のデバイス。
- 前記デバイスは、光学的に透明な材料を含む少なくとも1つの定着要素をさらに備える、請求項14に記載のデバイス。
- 前記第1の閉鎖構成において、前記少なくとも1つの可動要素と前記少なくとも1つの定着要素とは、側部開口を形成する、請求項15に記載のデバイス。
- 前記少なくとも1つの定着要素は、前記管状体の遠位にあり、前記デバイスの縦軸と平行に配向される、請求項15に記載のデバイス。
- 前記管状体の近位端にハンドルをさらに備える、請求項1に記載のデバイス。
- 前記ハンドルは、旋回部材と、デバイス係止機構とを備える、請求項18に記載のデバイス。
- 前記ハンドルは、前記旋回部材の移動を制限するように構成される旋回部材係止部をさらに備える、請求項19に記載のデバイス。
- 前記ハンドルは、前記旋回部材の作動力を設定する抵抗機構をさらに備える、請求項19に記載のデバイス。
- 前記ハンドルは、前記旋回部材に対して偏向力を付与するように構成される偏向部材をさらに備える、請求項19に記載のデバイス。
- 前記デバイス係止機構は、内視鏡システムを固定するように構成される、請求項19に記載のデバイス。
- 前記ハンドルは、1つ以上のポートを備える、請求項18に記載のデバイス。
- 少なくとも1つのポートは、洗浄ポートとして構成される、請求項24に記載のデバイス。
- 少なくとも1つのポートは、前記内視鏡システムを保持するように構成される前記少なくとも1つの内腔と連通している可視化ポートである、請求項24に記載のデバイス。
- 前記少なくとも1つの可動要素は、凸状外側表面を備える、請求項3に記載のデバイス。
- 前記少なくとも1つの可動要素は、凹状内側表面を備える、請求項27に記載のデバイス。
- 前記内視鏡システムを保持するように構成される前記少なくとも1つの内腔は、該内視鏡システムを取外し可能に受容するように構成されている、請求項1に記載のデバイス。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10691408P | 2008-10-20 | 2008-10-20 | |
| US61/106,914 | 2008-10-20 | ||
| PCT/US2009/061358 WO2010048208A1 (en) | 2008-10-20 | 2009-10-20 | Retractor cannula system for accessing and visualizing spine and related methods |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012506261A JP2012506261A (ja) | 2012-03-15 |
| JP2012506261A5 JP2012506261A5 (ja) | 2012-12-06 |
| JP5820271B2 true JP5820271B2 (ja) | 2015-11-24 |
Family
ID=42119641
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011532338A Expired - Fee Related JP5820271B2 (ja) | 2008-10-20 | 2009-10-20 | 脊椎へのアクセスおよび視覚化のための開創器カニューレシステムおよび関連方法 |
Country Status (8)
| Country | Link |
|---|---|
| US (3) | US9610095B2 (ja) |
| EP (1) | EP2346417A4 (ja) |
| JP (1) | JP5820271B2 (ja) |
| CN (2) | CN102256554B (ja) |
| AU (1) | AU2009307657A1 (ja) |
| BR (1) | BRPI0919859A2 (ja) |
| CA (1) | CA2741187A1 (ja) |
| WO (1) | WO2010048208A1 (ja) |
Families Citing this family (88)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10154163A1 (de) | 2001-11-03 | 2003-05-22 | Advanced Med Tech | Vorrichtung zum Aufrichten und Stabilisieren der Wirbelsäule |
| US8979931B2 (en) | 2006-12-08 | 2015-03-17 | DePuy Synthes Products, LLC | Nucleus replacement device and method |
| BRPI0818608A2 (pt) | 2007-10-05 | 2015-04-22 | Synthes Gmbh | Sistema de dilatação sequencial direcional para dilatar a partir de um nervo da anatomia de um paciente, e, método para formar uma abertura de acesso através de um músculo psoas até a espinha de um paciente utilizando um sistema de dilatação |
| US9049986B2 (en) * | 2010-09-20 | 2015-06-09 | Spine View, Inc. | Cannulotome |
| JP5511627B2 (ja) * | 2010-10-28 | 2014-06-04 | 日立アロカメディカル株式会社 | 脊椎手術支援用超音波プローブ及びその製造方法 |
| EP2654583A2 (en) | 2010-12-20 | 2013-10-30 | Spine View, Inc. | Articulating tissue removal systems and methods |
| EP2667785A2 (en) * | 2011-01-27 | 2013-12-04 | Mayo Foundation for Medical Education and Research | Cytological sample acquisition device and method |
| US20140073987A1 (en) * | 2011-05-09 | 2014-03-13 | The Johns Hopkins University | Minimally invasive skin biopsy device for removal of skin conditions in the epidermis |
| US9414816B2 (en) | 2011-06-23 | 2016-08-16 | Devicor Medical Products, Inc. | Introducer for biopsy device |
| DE102011107612A1 (de) * | 2011-06-30 | 2013-01-03 | Siegfried Riek | Trokarsystem |
| CA2851616A1 (en) | 2011-10-15 | 2013-04-18 | Transmed7, Llc | Soft tissue coring biopsy devices and methods |
| US8998807B2 (en) | 2011-10-24 | 2015-04-07 | Warsaw Orthopedic, Inc. | Retractor extensions and methods of use |
| US9622779B2 (en) | 2011-10-27 | 2017-04-18 | DePuy Synthes Products, Inc. | Method and devices for a sub-splenius / supra-levator scapulae surgical access technique |
| US9808232B2 (en) | 2011-11-01 | 2017-11-07 | DePuy Synthes Products, Inc. | Dilation system |
| WO2013081691A1 (en) | 2011-12-03 | 2013-06-06 | Ouroboros Medical, Inc. | Safe cutting heads and systems for fast removal of a target tissue |
| US9265490B2 (en) | 2012-04-16 | 2016-02-23 | DePuy Synthes Products, Inc. | Detachable dilator blade |
| US20150342621A1 (en) * | 2014-05-29 | 2015-12-03 | Avery M. Jackson, III | Illuminated endoscopic pedicle probe with dynamic real time monitoring for proximity to nerves |
| US20150080755A1 (en) * | 2012-05-16 | 2015-03-19 | Avery M. Jackson, III | Illuminated Endoscopic Pedicle Probe With Electromyographic Monitoring |
| US20140142420A1 (en) | 2012-05-16 | 2014-05-22 | Avery M. Jackson, III | Illuminated Endoscopic Pedicle Probe With Replaceable Tip |
| US11376017B2 (en) * | 2019-07-01 | 2022-07-05 | Fusion Orthopedics, Llc | Surgical instruments including a set of cutting burrs for performing an osteotomy |
| US9480855B2 (en) | 2012-09-26 | 2016-11-01 | DePuy Synthes Products, Inc. | NIR/red light for lateral neuroprotection |
| JP6158494B2 (ja) * | 2012-10-01 | 2017-07-05 | 周 中村 | 経皮的内視鏡下椎間板ヘルニア摘出術用器具 |
| US20140200402A1 (en) | 2013-01-16 | 2014-07-17 | Phillip Jack Snoke | Medical Device Introduction Systems and Methods |
| US20170055813A1 (en) * | 2013-01-16 | 2017-03-02 | Uvision 360, Inc. | Medical device introduction and imaging system, and associated method |
| US20140228875A1 (en) * | 2013-02-08 | 2014-08-14 | Nidus Medical, Llc | Surgical device with integrated visualization and cauterization |
| US9314254B2 (en) * | 2013-03-15 | 2016-04-19 | DePuy Synthes Products, Inc. | Methods and devices for removing a spinal disc |
| US20140358029A1 (en) * | 2013-05-28 | 2014-12-04 | Transmed7, Llc | Soft tissue coring devices and methods |
| US9463001B2 (en) * | 2013-05-28 | 2016-10-11 | Transmed7, Llc | Soft tissue coring biopsy devices and methods |
| WO2015004671A1 (en) * | 2013-07-12 | 2015-01-15 | Kramer Mordechai | Apparatuses for endoscopic cryo-biopsy and methods of use |
| US10342563B2 (en) | 2013-07-19 | 2019-07-09 | DePuy Synthes Products, Inc. | Anti-clogging device for a vacuum-assisted, tissue removal system |
| US9155527B2 (en) | 2013-08-22 | 2015-10-13 | Transmed7, Llc | Soft tissue coring biopsy devices and methods |
| EP3043719B1 (en) * | 2013-09-12 | 2022-04-13 | Transmed7, LLC | Tissue coring biopsy devices |
| US20150141866A1 (en) * | 2013-11-18 | 2015-05-21 | Martin L. Mayse | System and method for evaluation of the pleural space |
| US20160324628A1 (en) * | 2014-01-08 | 2016-11-10 | Elenza ,Inc. | Electro-optical monofocal intraocular lens |
| US10016136B2 (en) * | 2014-06-20 | 2018-07-10 | Optomak, Inc. | Image relaying cannula with detachable self-aligning connector |
| WO2016001126A1 (en) * | 2014-06-30 | 2016-01-07 | Koninklijke Philips N.V. | Sample holder for biological samples |
| US10524723B2 (en) | 2014-07-23 | 2020-01-07 | Alphatec Spine, Inc. | Method for measuring the displacements of a vertebral column |
| US9980737B2 (en) | 2014-08-04 | 2018-05-29 | Medos International Sarl | Flexible transport auger |
| JP6591987B2 (ja) * | 2014-09-03 | 2019-10-16 | テルモ株式会社 | 医療用デバイス |
| US9924979B2 (en) | 2014-09-09 | 2018-03-27 | Medos International Sarl | Proximal-end securement of a minimally invasive working channel |
| US10111712B2 (en) | 2014-09-09 | 2018-10-30 | Medos International Sarl | Proximal-end securement of a minimally invasive working channel |
| US10264959B2 (en) | 2014-09-09 | 2019-04-23 | Medos International Sarl | Proximal-end securement of a minimally invasive working channel |
| US10076315B2 (en) | 2014-09-18 | 2018-09-18 | Transmed7, Llc | Soft tissue biopsy or excisional devices and methods |
| US9999758B2 (en) | 2014-09-19 | 2018-06-19 | Transmed7, Llc | In-situ material delivery devices and methods |
| US10231750B2 (en) | 2014-09-29 | 2019-03-19 | Transmed7, Llc | Excisional device distal working end actuation mechanism and method |
| WO2016141186A1 (en) | 2015-03-03 | 2016-09-09 | Transmed7, Llc | Devices and methods for soft tissue biopsy and tissue sample collection |
| US20160287210A1 (en) * | 2015-03-31 | 2016-10-06 | Boston Scientific Scimed, Inc. | Devices and methods for ultrasound imaging |
| US10786264B2 (en) | 2015-03-31 | 2020-09-29 | Medos International Sarl | Percutaneous disc clearing device |
| US10485522B2 (en) | 2015-04-28 | 2019-11-26 | Transmed7, Llc | Excisional coring devices and methods for image guided hard and soft tissue biopsy |
| WO2016177637A1 (en) * | 2015-05-06 | 2016-11-10 | Bioscopex Aps | Endoscopic device for multiple sample biopsy |
| US10987129B2 (en) | 2015-09-04 | 2021-04-27 | Medos International Sarl | Multi-shield spinal access system |
| US11672562B2 (en) | 2015-09-04 | 2023-06-13 | Medos International Sarl | Multi-shield spinal access system |
| US11439380B2 (en) | 2015-09-04 | 2022-09-13 | Medos International Sarl | Surgical instrument connectors and related methods |
| CN113143355A (zh) | 2015-09-04 | 2021-07-23 | 美多斯国际有限公司 | 多护罩脊柱进入系统 |
| US11744447B2 (en) | 2015-09-04 | 2023-09-05 | Medos International | Surgical visualization systems and related methods |
| MX2018002959A (es) * | 2015-09-17 | 2018-05-02 | m jackson Avery iii | Sonda pedicular endoscopica iluminada con monitoreo dinamico en tiempo real para proximidad a los nervios. |
| US10299838B2 (en) | 2016-02-05 | 2019-05-28 | Medos International Sarl | Method and instruments for interbody fusion and posterior fixation through a single incision |
| KR101681451B1 (ko) * | 2016-05-18 | 2016-11-30 | 주식회사 텍코드 | 경성 척추 내시경 |
| PL3509506T3 (pl) | 2016-09-07 | 2021-10-25 | Vertos Medical, Inc. | Narzędzia do przezskórnej resekcji zachyłka bocznego |
| US20180078410A1 (en) * | 2016-09-20 | 2018-03-22 | Cosmin-Adrian Gavanescu | Surgery Device |
| US11744602B2 (en) * | 2017-02-15 | 2023-09-05 | Transmed7, Llc | Advanced minimally invasive multi-functional robotic surgical devices and methods |
| CN107049483A (zh) * | 2017-05-16 | 2017-08-18 | 张鲲 | 用于血管外科的激光手术器械 |
| CN107028626B (zh) * | 2017-05-26 | 2023-06-06 | 北京龙慧珩医疗科技发展有限公司 | 一种前列腺术弹性配准方法及装置 |
| WO2019069456A1 (ja) * | 2017-10-06 | 2019-04-11 | オリンパス株式会社 | ダイレータ及び処置システム |
| CN107736869B (zh) * | 2017-10-24 | 2023-10-20 | 齐鲁工业大学 | 一种双头全视角结肠内窥镜及其使用方法 |
| CN107595330B (zh) * | 2017-10-26 | 2022-01-18 | 钮红丽 | 换挡宫颈活检钳 |
| US10758214B2 (en) * | 2017-11-13 | 2020-09-01 | UVision360, Inc. | Biopsy device and method |
| SE541805C2 (en) * | 2017-12-22 | 2019-12-17 | Multi4 Ab | An endosurgical device |
| JP7258900B2 (ja) * | 2018-02-21 | 2023-04-17 | メドス・インターナショナル・エスエイアールエル | 外科用可視化システム及び関連する方法 |
| WO2020027123A1 (ja) * | 2018-08-01 | 2020-02-06 | テルモ株式会社 | 止血器具 |
| EP3820559A4 (en) * | 2018-08-02 | 2022-08-03 | Bard Peripheral Vascular, Inc. | IMPLANTABLE CHAMBER PLACEMENT SYSTEM FEATURING A LOW-SCAR EXTERIOR |
| US20210298591A1 (en) * | 2018-08-09 | 2021-09-30 | Optical Spine, Llc | Translucent illuminated endoscopic probe |
| US11013530B2 (en) | 2019-03-08 | 2021-05-25 | Medos International Sarl | Surface features for device retention |
| US11241252B2 (en) | 2019-03-22 | 2022-02-08 | Medos International Sarl | Skin foundation access portal |
| US11129727B2 (en) | 2019-03-29 | 2021-09-28 | Medos International Sari | Inflatable non-distracting intervertebral implants and related methods |
| EP3946087B1 (en) | 2019-04-04 | 2024-04-24 | Transmed7, LLC | Excisional devices |
| US11813026B2 (en) | 2019-04-05 | 2023-11-14 | Medos International Sarl | Systems, devices, and methods for providing surgical trajectory guidance |
| US10863886B2 (en) | 2019-05-03 | 2020-12-15 | UVision360, Inc. | Rotatable introducers |
| CN110680465B (zh) * | 2019-10-31 | 2023-08-08 | 四川省人民医院 | 一种用于内部组织切除的半开合式刀刃端头 |
| US11253371B2 (en) | 2019-12-27 | 2022-02-22 | Henry F. Fabian, JR. | Vertebral body shaver assembly |
| WO2021243644A1 (en) | 2020-06-04 | 2021-12-09 | Chin Sing Fatt | Surgical devices controllable by surgical robotic systems |
| CN112244949B (zh) * | 2020-09-10 | 2022-04-12 | 杭州德柯医疗科技有限公司 | 多向调弯的介入器械 |
| CN111904599A (zh) * | 2020-09-18 | 2020-11-10 | 象山县第一人民医院医疗健康集团 | 一种胸腔镜用机械手臂 |
| US20240016483A1 (en) * | 2020-10-16 | 2024-01-18 | Gyrus Acmi, Inc. D/B/A Olympus Surgical Technologies America | Optically enhanced instrument with laser fluorescing capabilities |
| KR102572233B1 (ko) * | 2021-03-03 | 2023-08-30 | 주식회사 뉴라이프 | 디스크 수술용 신경 보호 견인기 장치 |
| US11771517B2 (en) | 2021-03-12 | 2023-10-03 | Medos International Sarl | Camera position indication systems and methods |
| US12042133B2 (en) | 2021-05-07 | 2024-07-23 | Arthrex, Inc. | System providing improved visibility for minimally invasive surgery systems |
| WO2022272258A1 (en) * | 2021-06-23 | 2022-12-29 | Gyrus Acmi, Inc. D/B/A Olympus Surgical Technologies America | Tissue collector with shuttle and expandable shaft |
Family Cites Families (89)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3532308A (en) | 1968-06-04 | 1970-10-06 | Bendix Corp | Filament structure |
| US4319563A (en) | 1977-12-02 | 1982-03-16 | Olympus Optical Co., Ltd. | Endoscope with a smoothly curved distal end face |
| JPS59500004U (ja) | 1982-03-16 | 1984-03-22 | ||
| US4545374A (en) * | 1982-09-03 | 1985-10-08 | Jacobson Robert E | Method and instruments for performing a percutaneous lumbar diskectomy |
| US4557255A (en) | 1983-08-22 | 1985-12-10 | Goodman Tobias M | Ureteroscope |
| JPS60179033A (ja) * | 1984-02-28 | 1985-09-12 | 雪印乳業株式会社 | 腹腔鏡 |
| US4890615B1 (en) * | 1987-11-05 | 1993-11-16 | Linvatec Corporation | Arthroscopic suturing instrument |
| DE3738692A1 (de) | 1987-11-13 | 1989-06-01 | Hannes Dr Haberl | Chirurgische fasszange |
| US4836205A (en) * | 1988-03-21 | 1989-06-06 | Barrett Gene R | Grasper-stitcher device for arthroscopic anterior cruciate ligament repair |
| US4887612A (en) | 1988-04-27 | 1989-12-19 | Esco Precision, Inc. | Endoscopic biopsy forceps |
| GB8816033D0 (en) | 1988-07-06 | 1988-08-10 | Ethicon Inc | Improved safety trocar |
| US5172700A (en) | 1989-01-31 | 1992-12-22 | C. R. Bard, Inc. | Disposable biopsy forceps |
| US5007908A (en) | 1989-09-29 | 1991-04-16 | Everest Medical Corporation | Electrosurgical instrument having needle cutting electrode and spot-coag electrode |
| US5984939A (en) | 1989-12-05 | 1999-11-16 | Yoon; Inbae | Multifunctional grasping instrument with cutting member and operating channel for use in endoscopic and non-endoscopic procedures |
| US5922002A (en) | 1989-12-05 | 1999-07-13 | Yoon; Inbae | Surgical instrument with jaws and movable internal biopsy device and method for use thereof |
| US5665100A (en) | 1989-12-05 | 1997-09-09 | Yoon; Inbae | Multifunctional instrument with interchangeable operating units for performing endoscopic procedures |
| US5797958A (en) | 1989-12-05 | 1998-08-25 | Yoon; Inbae | Endoscopic grasping instrument with scissors |
| US5893863A (en) * | 1989-12-05 | 1999-04-13 | Yoon; Inbae | Surgical instrument with jaws and movable internal hook member for use thereof |
| US5454365A (en) | 1990-11-05 | 1995-10-03 | Bonutti; Peter M. | Mechanically expandable arthroscopic retractors |
| US5228451A (en) | 1990-05-10 | 1993-07-20 | Symbiosis Corporation | Biopsy forceps device having stiff distal end |
| US5509922A (en) | 1990-10-05 | 1996-04-23 | United States Surgical Corporation | Endoscopic surgical instrument |
| US5626609A (en) | 1990-10-05 | 1997-05-06 | United States Surgical Corporation | Endoscopic surgical instrument |
| US5984919A (en) | 1991-02-13 | 1999-11-16 | Applied Medical Resources Corporation | Surgical trocar |
| US5275610A (en) * | 1991-05-13 | 1994-01-04 | Cook Incorporated | Surgical retractors and method of use |
| US5476479A (en) | 1991-09-26 | 1995-12-19 | United States Surgical Corporation | Handle for endoscopic surgical instruments and jaw structure |
| US5235966A (en) * | 1991-10-17 | 1993-08-17 | Jay Jamner | Endoscopic retractor |
| US5313962A (en) | 1991-10-18 | 1994-05-24 | Obenchain Theodore G | Method of performing laparoscopic lumbar discectomy |
| US6500173B2 (en) * | 1992-01-07 | 2002-12-31 | Ronald A. Underwood | Methods for electrosurgical spine surgery |
| US5500019A (en) | 1992-02-06 | 1996-03-19 | Johnson; Gerald W. | Endoscopic augmentation mammoplasty |
| US5258026A (en) | 1992-02-06 | 1993-11-02 | Johnson Gerald W | Endoscopic augmentation mammoplasty and instruments therefor |
| US5342389A (en) | 1992-04-28 | 1994-08-30 | Habley Medical Technology Corporation | Tissue manipulator |
| US5540711A (en) | 1992-06-02 | 1996-07-30 | General Surgical Innovations, Inc. | Apparatus and method for developing an anatomic space for laparoscopic procedures with laparoscopic visualization |
| US6312442B1 (en) | 1992-06-02 | 2001-11-06 | General Surgical Innovations, Inc. | Method for developing an anatomic space for laparoscopic hernia repair |
| US5354302A (en) | 1992-11-06 | 1994-10-11 | Ko Sung Tao | Medical device and method for facilitating intra-tissue visual observation and manipulation of distensible tissues |
| US5327908A (en) | 1993-01-08 | 1994-07-12 | United States Surgical Corporation | Surgical apparatus for measuring body tissue |
| DE4303274C2 (de) | 1993-02-05 | 1997-02-06 | Wolf Gmbh Richard | Endoskopisches Instrument |
| US5373854A (en) | 1993-07-15 | 1994-12-20 | Kolozsi; William Z. | Biopsy apparatus for use in endoscopy |
| US5449355A (en) | 1993-11-24 | 1995-09-12 | Valleylab Inc. | Retrograde tissue splitter and method |
| US5535754A (en) | 1994-03-04 | 1996-07-16 | Doherty; Thomas E. | Endoscopic biopsy forceps - disposable |
| CA2144211C (en) | 1994-03-16 | 2005-05-24 | David T. Green | Surgical instruments useful for endoscopic spinal procedures |
| WO1995035064A1 (en) | 1994-06-20 | 1995-12-28 | Slotman Gus J | Tissue spreading surgical instrument |
| US5562694A (en) | 1994-10-11 | 1996-10-08 | Lasersurge, Inc. | Morcellator |
| DE19521257C2 (de) * | 1995-06-10 | 1999-01-28 | Winter & Ibe Olympus | Chirurgische Zange |
| US5759150A (en) * | 1995-07-07 | 1998-06-02 | Olympus Optical Co., Ltd. | System for evulsing subcutaneous tissue |
| US6679833B2 (en) | 1996-03-22 | 2004-01-20 | Sdgi Holdings, Inc. | Devices and methods for percutaneous surgery |
| US5762613A (en) | 1996-05-07 | 1998-06-09 | Spectrascience, Inc. | Optical biopsy forceps |
| US5843000A (en) | 1996-05-07 | 1998-12-01 | The General Hospital Corporation | Optical biopsy forceps and method of diagnosing tissue |
| US5785647A (en) | 1996-07-31 | 1998-07-28 | United States Surgical Corporation | Surgical instruments useful for spinal surgery |
| US5776075A (en) | 1996-08-09 | 1998-07-07 | Symbiosis Corporation | Endoscopic bioptome jaw assembly having three or more jaws and an endoscopic instrument incorporating same |
| DE19632298B4 (de) * | 1996-08-10 | 2004-09-23 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Greifeinrichtung zum Einsatz in der Minimal-Invasiven-Chirurgie |
| US5904647A (en) * | 1996-10-08 | 1999-05-18 | Asahi Kogyo Kabushiki Kaisha | Treatment accessories for an endoscope |
| TW375522B (en) | 1996-10-24 | 1999-12-01 | Danek Medical Inc | Devices for percutaneous surgery under direct visualization and through an elongated cannula |
| US6096037A (en) | 1997-07-29 | 2000-08-01 | Medtronic, Inc. | Tissue sealing electrosurgery device and methods of sealing tissue |
| US6066102A (en) | 1998-03-09 | 2000-05-23 | Spectrascience, Inc. | Optical biopsy forceps system and method of diagnosing tissue |
| US6178346B1 (en) | 1998-10-23 | 2001-01-23 | David C. Amundson | Infrared endoscopic imaging in a liquid with suspended particles: method and apparatus |
| US6228022B1 (en) | 1998-10-28 | 2001-05-08 | Sdgi Holdings, Inc. | Methods and instruments for spinal surgery |
| US6083150A (en) | 1999-03-12 | 2000-07-04 | C. R. Bard, Inc. | Endoscopic multiple sample biopsy forceps |
| JP3596340B2 (ja) | 1999-03-18 | 2004-12-02 | 株式会社日立製作所 | 手術用挿入装置 |
| US7094258B2 (en) * | 1999-08-18 | 2006-08-22 | Intrinsic Therapeutics, Inc. | Methods of reinforcing an annulus fibrosis |
| GB2354170A (en) * | 1999-09-16 | 2001-03-21 | Minop Ltd | A tool and an effector, e.g. surgical forceps, scissors or spreader |
| US6428548B1 (en) | 1999-11-18 | 2002-08-06 | Russell F. Durgin | Apparatus and method for compressing body tissue |
| US6851430B2 (en) | 2000-05-01 | 2005-02-08 | Paul M. Tsou | Method and apparatus for endoscopic spinal surgery |
| DE10037421C2 (de) | 2000-07-21 | 2003-06-26 | Leonid Sverdlov | Vorrichtung zum minimalinvasiven Zugang zu den Organen der Bauchhöhle |
| US7204851B2 (en) | 2000-08-30 | 2007-04-17 | Sdgi Holdings, Inc. | Method and apparatus for delivering an intervertebral disc implant |
| AU2001288462A1 (en) * | 2000-08-30 | 2002-03-13 | Cerebral Vascular Applications Inc. | Medical instrument |
| US6464702B2 (en) * | 2001-01-24 | 2002-10-15 | Ethicon, Inc. | Electrosurgical instrument with closing tube for conducting RF energy and moving jaws |
| CA2442598C (en) | 2001-04-06 | 2011-10-04 | Sean T. Dycus | Vessel sealer and divider with non-conductive stop members |
| US6808491B2 (en) | 2001-05-21 | 2004-10-26 | Syntheon, Llc | Methods and apparatus for on-endoscope instruments having end effectors and combinations of on-endoscope and through-endoscope instruments |
| US6592604B2 (en) | 2001-09-28 | 2003-07-15 | Ethicon, Inc. | Vessel harvesting retractor with dissection element |
| EP1453430A4 (en) | 2001-11-09 | 2009-02-18 | Cardio Optics Inc | DIRECT REAL-TIME BILLING IN A HEART CATHETERIZATION |
| US7261688B2 (en) | 2002-04-05 | 2007-08-28 | Warsaw Orthopedic, Inc. | Devices and methods for percutaneous tissue retraction and surgery |
| WO2003105673A2 (en) | 2002-06-17 | 2003-12-24 | Trimedyne, Inc. | Devices and methods for minimally invasive treatment of degenerated spinal discs |
| US6945933B2 (en) | 2002-06-26 | 2005-09-20 | Sdgi Holdings, Inc. | Instruments and methods for minimally invasive tissue retraction and surgery |
| US7582058B1 (en) | 2002-06-26 | 2009-09-01 | Nuvasive, Inc. | Surgical access system and related methods |
| US6966919B2 (en) | 2002-09-20 | 2005-11-22 | Id, Llc | Instrument for applying a surgical fastener particularly for the transoral treatment of gastroesophageal reflux disease (GERD) |
| US20040093000A1 (en) * | 2002-10-23 | 2004-05-13 | Stephen Kerr | Direct vision port site dissector |
| EP1553882B1 (en) * | 2002-10-23 | 2009-04-29 | Intellimed Surgical Solutions LLC. | Direct vision port site dissector |
| US7056329B2 (en) * | 2002-10-23 | 2006-06-06 | Intellimed Surgical Solutions, Llc | Laparoscopic direct vision dissecting port |
| US20050020914A1 (en) | 2002-11-12 | 2005-01-27 | David Amundson | Coronary sinus access catheter with forward-imaging |
| US7559940B2 (en) * | 2002-12-18 | 2009-07-14 | Smith & Nephew, Inc. | Surgical biting punch |
| US7105000B2 (en) | 2003-03-25 | 2006-09-12 | Ethicon Endo-Surgery, Inc. | Surgical jaw assembly with increased mechanical advantage |
| EP1680177B1 (en) | 2003-09-25 | 2017-04-12 | NuVasive, Inc. | Surgical access system |
| JP3806713B2 (ja) * | 2003-10-06 | 2006-08-09 | オリンパス株式会社 | 内視鏡用フードと内視鏡 |
| CA2544749A1 (en) * | 2003-11-12 | 2005-05-26 | Applied Medical Resources Corporation | Overmolded grasper jaw |
| US7347863B2 (en) | 2004-05-07 | 2008-03-25 | Usgi Medical, Inc. | Apparatus and methods for manipulating and securing tissue |
| US20050251192A1 (en) | 2004-03-31 | 2005-11-10 | Shluzas Alan E | Access device having discrete visualization locations |
| US20050222518A1 (en) | 2004-04-06 | 2005-10-06 | Genocell, Llc | Biopsy and injection catheters |
| US7455639B2 (en) | 2004-09-20 | 2008-11-25 | Stephen Ritland | Opposing parallel bladed retractor and method of use |
| JP4967228B2 (ja) * | 2004-11-29 | 2012-07-04 | ソニー株式会社 | コンテンツ通信システム、通信装置および方法、並びにプログラム |
-
2009
- 2009-10-20 CA CA2741187A patent/CA2741187A1/en not_active Abandoned
- 2009-10-20 US US12/582,638 patent/US9610095B2/en active Active
- 2009-10-20 CN CN200980150604.1A patent/CN102256554B/zh not_active Expired - Fee Related
- 2009-10-20 CN CN201710182912.9A patent/CN107260231A/zh active Pending
- 2009-10-20 AU AU2009307657A patent/AU2009307657A1/en not_active Abandoned
- 2009-10-20 EP EP09822580.8A patent/EP2346417A4/en not_active Withdrawn
- 2009-10-20 JP JP2011532338A patent/JP5820271B2/ja not_active Expired - Fee Related
- 2009-10-20 BR BRPI0919859A patent/BRPI0919859A2/pt not_active IP Right Cessation
- 2009-10-20 WO PCT/US2009/061358 patent/WO2010048208A1/en active Application Filing
-
2011
- 2011-09-26 US US13/245,815 patent/US8888813B2/en active Active
-
2017
- 2017-04-03 US US15/477,727 patent/US20180021056A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| WO2010048208A1 (en) | 2010-04-29 |
| JP2012506261A (ja) | 2012-03-15 |
| US20100121153A1 (en) | 2010-05-13 |
| AU2009307657A1 (en) | 2010-04-29 |
| CN102256554B (zh) | 2017-06-09 |
| US8888813B2 (en) | 2014-11-18 |
| BRPI0919859A2 (pt) | 2015-12-15 |
| CN107260231A (zh) | 2017-10-20 |
| CA2741187A1 (en) | 2010-04-29 |
| EP2346417A4 (en) | 2017-04-26 |
| CN102256554A (zh) | 2011-11-23 |
| US20180021056A1 (en) | 2018-01-25 |
| EP2346417A1 (en) | 2011-07-27 |
| US9610095B2 (en) | 2017-04-04 |
| US20120016260A1 (en) | 2012-01-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5820271B2 (ja) | 脊椎へのアクセスおよび視覚化のための開創器カニューレシステムおよび関連方法 | |
| US8936545B2 (en) | Dilator with direct visualization | |
| US20120065659A1 (en) | Helical groove dilating device and related methods | |
| JP5709747B2 (ja) | 直接的可視化を有する貫通部材 | |
| US20090062871A1 (en) | Balloon cannula system for accessing and visualizing spine and related methods | |
| US8414587B2 (en) | Styli used to position device for carrying out selective discetomy | |
| JP2010518988A (ja) | 組織吸引のための拡張可能回転装置および方法 | |
| JP2014506167A (ja) | 関節運動組織除去システムおよび方法 | |
| CA3078440A1 (en) | Sharp turning steerable needle | |
| KR20240015173A (ko) | 직접 시각화 피처를 갖는 가이드와이어 네비게이션 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121019 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121019 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130920 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131004 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140106 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140114 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140128 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140204 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140303 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140310 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140403 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140926 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20141225 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20150123 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20150225 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150326 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150803 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20150901 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151002 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5820271 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |