JP5784607B2 - 超音波画像装置と三次元画像表示方法 - Google Patents
超音波画像装置と三次元画像表示方法 Download PDFInfo
- Publication number
- JP5784607B2 JP5784607B2 JP2012527662A JP2012527662A JP5784607B2 JP 5784607 B2 JP5784607 B2 JP 5784607B2 JP 2012527662 A JP2012527662 A JP 2012527662A JP 2012527662 A JP2012527662 A JP 2012527662A JP 5784607 B2 JP5784607 B2 JP 5784607B2
- Authority
- JP
- Japan
- Prior art keywords
- ultrasonic
- image
- ultrasonic probe
- dimensional image
- probe
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T15/00—3D [Three Dimensional] image rendering
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/13—Tomography
- A61B8/14—Echo-tomography
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4245—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4245—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient
- A61B8/4263—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient using sensors not mounted on the probe, e.g. mounted on an external reference frame
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
- A61B8/463—Displaying means of special interest characterised by displaying multiple images or images and diagnostic data on one display
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
- A61B8/466—Displaying means of special interest adapted to display 3D data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/483—Diagnostic techniques involving the acquisition of a 3D volume of data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8934—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a dynamic transducer configuration
- G01S15/8936—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a dynamic transducer configuration using transducers mounted for mechanical movement in three dimensions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8993—Three dimensional imaging systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52053—Display arrangements
- G01S7/52057—Cathode ray tube displays
- G01S7/52073—Production of cursor lines, markers or indicia by electronic means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52053—Display arrangements
- G01S7/52057—Cathode ray tube displays
- G01S7/52074—Composite displays, e.g. split-screen displays; Combination of multiple images or of images and alphanumeric tabular information
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/467—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient characterised by special input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/467—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient characterised by special input means
- A61B8/469—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient characterised by special input means for selection of a region of interest
Description
本実施の形態の超音波画像装置の全体概要を図1に示す。この超音波画像装置は、検査対象(図示省略)に超音波ビームを送り出すとともに検体対象からの反射エコーを受信する超音波探触子1と、超音波探触子1に超音波信号を送信するとともに超音波探触子1からの反射エコー信号を受信する超音波送受信回路2と、反射エコー信号を超音波画像に再構成する超音波信号変換部3と、超音波信号変換部3で作成された超音波画像を表示する画像表示部4と、超音波送受信回路2および超音波信号変換部3を含む装置の各部を制御する制御部5とを備えている。制御部5は、入力部6として、操作者からの入力を受け付けるためのキーやトラックボールなどを備えた操作パネル及び入力に必要なGUIなどを表示する表示部が備えられている。入力部6の表示部は、画像表示部4が兼ねることも可能である。
具体的には、操作者は超音波探触子移動方向として、画面に表示された断層像の面(xy面)の位置をz=0とし、手前から奥側への移動(視線方向と同じ方向)か、手前側への移動(視線方向と逆方向)かを入力部6に設定する(ステップ302)。ここでは視線方向と同じ方向を+z方向、視線方向と逆方向を−z方向と定義する。
本実施の形態の超音波画像装置も、装置の構成は図1に示したものと同様であるが、本実施の形態では、グラフィック表示部7に、ボディマークやプローブマークのほかに、3次元撮影において、入力部6を介して設定された超音波探触子1の移動方向を示す移動方向マークを表示させることが特徴であり、そのためグラフィック表示部7には、二つの移動方向(+z方向と−z方向)に対応する2種類の移動方向マークが格納されている。図6に、方向マークの一例と、それが断層像とともに画面に表示された様子を示す。
本実施の形態の超音波画像装置の全体概要を、図7に示す。図7において、図1の超音波画像装置と同じ符号で示す要素は、図1の超音波画像装置と同様の機能を有する。
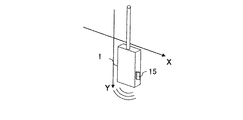
本実施の形態の超音波画像装置は、図7に示すように、超音波探触子1の実空間における位置を検出する位置情報センサ12を備える点および制御部5が位置情報センサ12からの位置情報を用いて検査対象の表面とほぼ平行な面すなわち超音波探触子1のビーム走査面と直交する面における超音波探触子1の位置と移動方向とを表示部に表示させる機能を有する点が異なる。グラフィック表示部7には、ボディマークやプローブマークのほかに、その移動方向を示す移動方向マークが収納されている。
Claims (14)
- 超音波探触子と、検査対象に前記超音波探触子を介して超音波信号を送受信させる送受信回路と、受信した超音波信号を用いて検査対象の超音波断層像を構成する画像構成部と、前記超音波断層像を表示する表示部と、前記画像構成部および前記表示部を制御する制御部とを備えた超音波画像装置であって、
前記超音波探触子を前記超音波断層像と交差する方向に移動したときに取得される複数枚の超音波断層像を用いて3次元画像を構築する3次元画像構築部と、
前記表示部の画面に表示された超音波断層像を基準として、それと交差する第1の方向と、当該第1の方向と反対向きの第2の方向のいずれかの超音波探触子移動方向を設定する超音波探触子移動方向設定部と、を備え
前記制御部は、前記超音波探触子移動方向設定部によって設定された超音波探触子の移動方向に応じて、前記3次元画像構築部において構築される3次元画像における複数枚の超音波断層像の配置順序を制御することを特徴とする超音波画像装置。 - 前記制御部は、前記3次元画像構築部で構築された3次元画像を前記表示部に表示させるとともに、前記設定された超音波探触子移動方向に応じて、表示される3次元画像の方向を制御することを特徴とする請求項1に記載の超音波画像装置。
- 前記超音波探触子移動方向設定部として、前記超音波探触子の移動方向を入力するための入力部を備えたことを特徴とする請求項1又は2に記載の超音波画像装置。
- 前記制御部は、前記超音波探触子移動方向が、前記表示部の画面に対する視線方向と同方向であるときに、前記超音波探触子の移動に伴い取得される複数の超音波断層像を時系列順に3次元画像空間に格納して3次元画像を構築し、前記移動方向が、前記表示部の画面に対する視線方向と逆方向であるときに、前記超音波探触子の移動に伴い取得される複数の超音波断層像を時系列とは逆の順序で前記3次元画像空間に格納して3次元画像を構築することを特徴とする請求項1乃至3のいずれか一項に記載の超音波画像装置。
- 前記表示部に表示させるオリエンテーション画像を記憶する画像記憶部を有し、
前記画像記憶部は、前記オリエンテーション画像として、前記超音波探触子の移動方向を示す移動方向マーク画像を備え、
前記制御部は、前記表示部の画面に表示された超音波断層像とともに前記移動方向マーク画像を表示させることを特徴とする請求項1に記載の超音波画像装置。 - 前記超音波探触子の実空間における位置情報を検出する位置センサを備え、
前記制御部は、前記位置センサからの位置情報をもとに、検査対象を表すオリエンテーション画像上に、前記超音波探触子の位置及び向き並びに前記設定された超音波探触子の移動方向を表示させることを特徴とする請求項5に記載の超音波画像装置。 - 前記制御部は、前記位置センサからの位置情報をもとに、前記超音波探触子が移動した範囲及び/又は方向を示す移動マークを前記オリエンテーション画像上に表示させることを特徴とする請求項6に記載の超音波画像装置。
- 検査対象に超音波探触子を介して超音波信号を送受信させるステップと、受信した超音波信号を用いて検査対象の超音波断層像を構成するステップと、前記超音波断層像を表示するステップと、を含む三次元画像表示方法であって、前記超音波探触子を前記超音波断層像と交差する方向に移動したときに取得される複数枚の超音波断層像を用いて3次元画像を構築するステップと、画面に表示された超音波断層像を基準として、それと交差する第1の方向と、当該第1の方向と反対向きの第2の方向のいずれかの超音波探触子移動方向を設定するステップと、前記設定された超音波探触子移動方向に応じて、前記構築される3次元画像における複数枚の超音波断層像の配置順序を制御するステップと、前記設定された超音波探触子の移動方向に応じて、前記構築される3次元画像における複数枚の超音波断層像の配置順序を制御するステップを含むことを特徴とする三次元画像表示方法。
- 前記構築された3次元画像を表示し、前記設定された超音波探触子移動方向に応じて、表示される3次元画像の方向を制御するステップを含むことを特徴とする請求項8に記載の三次元画像表示方法。
- 前記超音波探触子の移動方向を入力するステップを含むことを特徴とする請求項8に記載の三次元画像表示方法。
- 前記超音波探触子移動方向が、前記画面に対する視線方向と同方向であるときに、前記超音波探触子の移動に伴い取得される複数の超音波断層像を時系列順に3次元画像空間に格納して3次元画像を構築し、前記移動方向が、前記画面に対する視線方向と逆方向であるときに、前記超音波探触子の移動に伴い取得される複数の超音波断層像を時系列とは逆の順序で前記3次元画像空間に格納して3次元画像を構築するステップを含むことを特徴とする請求項8に記載の三次元画像表示方法。
- 前記超音波探触子の移動方向を示す移動方向マーク画像をオリエンテーション画像として記憶するステップと、
前記超音波断層像とともに前記オリエンテーション画像を表示するステップを含むことを特徴とする請求項8に記載の三次元画像表示方法。 - 前記超音波探触子の実空間における位置情報を検出するステップと、
前記位置情報をもとに、検査対象を表すオリエンテーション画像上に、前記超音波探触子の位置及び向き並びに前記設定された超音波探触子移動方向を表示させるステップと、を含むことを特徴とする請求項12に記載の三次元画像表示方法。 - 前記位置情報をもとに、前記超音波探触子が移動した範囲及び/又は方向を示す移動マークを前記オリエンテーション画像上に表示させることを特徴とする請求項13に記載の三次元画像表示方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012527662A JP5784607B2 (ja) | 2010-08-06 | 2011-07-21 | 超音波画像装置と三次元画像表示方法 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010177048 | 2010-08-06 | ||
| JP2010177048 | 2010-08-06 | ||
| PCT/JP2011/066516 WO2012017827A1 (ja) | 2010-08-06 | 2011-07-21 | 超音波画像装置と超音波画像を用いた三次元画像表示方法 |
| JP2012527662A JP5784607B2 (ja) | 2010-08-06 | 2011-07-21 | 超音波画像装置と三次元画像表示方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2012017827A1 JPWO2012017827A1 (ja) | 2013-10-03 |
| JP5784607B2 true JP5784607B2 (ja) | 2015-09-24 |
Family
ID=45559333
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012527662A Active JP5784607B2 (ja) | 2010-08-06 | 2011-07-21 | 超音波画像装置と三次元画像表示方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9241685B2 (ja) |
| EP (1) | EP2601892A4 (ja) |
| JP (1) | JP5784607B2 (ja) |
| CN (1) | CN103068315B (ja) |
| WO (1) | WO2012017827A1 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9241685B2 (en) | 2010-08-06 | 2016-01-26 | Hitachi Medical Corporation | Ultrasonic imaging apparatus and three-dimensional image display method using ultrasonic image |
| JP5835903B2 (ja) * | 2011-02-03 | 2015-12-24 | 株式会社東芝 | 超音波診断装置 |
| CN103582459B (zh) * | 2012-04-11 | 2015-07-29 | 株式会社东芝 | 超声波诊断装置 |
| JP6205709B2 (ja) * | 2012-10-30 | 2017-10-04 | セイコーエプソン株式会社 | 超音波測定装置 |
| KR20150059059A (ko) * | 2013-11-21 | 2015-05-29 | 삼성메디슨 주식회사 | 초음파 영상 표시 방법 및 장치 |
| CN107072632A (zh) * | 2014-09-24 | 2017-08-18 | B-K医疗公司 | 换能器定向标记 |
| KR20170093632A (ko) * | 2016-02-05 | 2017-08-16 | 삼성전자주식회사 | 전자 장치 및 그의 동작 방법 |
| EP3203440A1 (en) * | 2016-02-08 | 2017-08-09 | Nokia Technologies Oy | A method, apparatus and computer program for obtaining images |
| CN107689072A (zh) * | 2016-06-12 | 2018-02-13 | 中慧医学成像有限公司 | 一种三维图像成像方法和系统 |
| WO2018205274A1 (zh) * | 2017-05-12 | 2018-11-15 | 深圳迈瑞生物医疗电子股份有限公司 | 一种超声设备及其三维超声图像的显示变换方法、系统 |
| EP3485816A1 (en) | 2017-11-21 | 2019-05-22 | Koninklijke Philips N.V. | Method and apparatus for guiding an ultrasound probe |
| JP7447692B2 (ja) | 2020-06-16 | 2024-03-12 | コニカミノルタ株式会社 | 超音波診断装置、超音波診断装置の制御方法、及び、超音波診断装置の制御プログラム |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0523330A (ja) * | 1991-07-17 | 1993-02-02 | Toshiba Corp | 超音波診断装置 |
| JP2000325347A (ja) * | 1999-05-24 | 2000-11-28 | Toshiba Corp | 超音波診断装置および3次元画像データの再構築方法 |
| JP2001017433A (ja) * | 1999-07-06 | 2001-01-23 | Toshiba Corp | 超音波診断装置及び超音波画像表示装置 |
| JP2003325513A (ja) * | 2002-05-16 | 2003-11-18 | Aloka Co Ltd | 超音波診断装置 |
| JP2004057379A (ja) * | 2002-07-26 | 2004-02-26 | Aloka Co Ltd | 超音波診断装置 |
| WO2005096948A1 (ja) * | 2004-04-08 | 2005-10-20 | Matsushita Electric Industrial Co., Ltd. | 超音波診断装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3361692B2 (ja) | 1996-05-10 | 2003-01-07 | ジーイー横河メディカルシステム株式会社 | 超音波診断装置 |
| JP3352613B2 (ja) | 1997-10-17 | 2002-12-03 | 松下電器産業株式会社 | 超音波画像診断装置 |
| JP4064517B2 (ja) | 1998-03-12 | 2008-03-19 | 株式会社日立メディコ | 超音波診断装置 |
| JP3905644B2 (ja) * | 1998-06-15 | 2007-04-18 | 東芝医用システムエンジニアリング株式会社 | 3次元超音波システム |
| US6413219B1 (en) * | 1999-03-31 | 2002-07-02 | General Electric Company | Three-dimensional ultrasound data display using multiple cut planes |
| WO2005119025A2 (en) * | 2004-06-01 | 2005-12-15 | Spectrum Dynamics Llc | Radioactive-emission-measurement optimization to specific body structures |
| JP4638819B2 (ja) * | 2003-08-08 | 2011-02-23 | パナソニック株式会社 | 超音波診断装置 |
| WO2006059668A1 (ja) | 2004-12-03 | 2006-06-08 | Hitachi Medical Corporation | 超音波装置、超音波撮像プログラム及び超音波撮像方法 |
| WO2006064676A1 (ja) * | 2004-12-13 | 2006-06-22 | Hitachi Medical Corporation | 超音波診断装置 |
| JP4745133B2 (ja) * | 2006-05-30 | 2011-08-10 | 株式会社東芝 | 超音波診断装置、医用画像処理装置及び医用画像処理プログラム |
| JP5268374B2 (ja) * | 2008-01-25 | 2013-08-21 | 株式会社東芝 | 超音波診断装置、及びその制御方法 |
| EP2312534A3 (en) * | 2009-10-15 | 2011-07-06 | Hitachi Aloka Medical, Ltd. | Ultrasonic volume data processing device |
| JP2011160412A (ja) * | 2010-01-06 | 2011-08-18 | Panasonic Corp | 撮像装置 |
| US9241685B2 (en) | 2010-08-06 | 2016-01-26 | Hitachi Medical Corporation | Ultrasonic imaging apparatus and three-dimensional image display method using ultrasonic image |
-
2011
- 2011-07-21 US US13/814,371 patent/US9241685B2/en active Active
- 2011-07-21 JP JP2012527662A patent/JP5784607B2/ja active Active
- 2011-07-21 CN CN201180038803.0A patent/CN103068315B/zh active Active
- 2011-07-21 EP EP11814457.5A patent/EP2601892A4/en not_active Withdrawn
- 2011-07-21 WO PCT/JP2011/066516 patent/WO2012017827A1/ja active Application Filing
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0523330A (ja) * | 1991-07-17 | 1993-02-02 | Toshiba Corp | 超音波診断装置 |
| JP2000325347A (ja) * | 1999-05-24 | 2000-11-28 | Toshiba Corp | 超音波診断装置および3次元画像データの再構築方法 |
| JP2001017433A (ja) * | 1999-07-06 | 2001-01-23 | Toshiba Corp | 超音波診断装置及び超音波画像表示装置 |
| JP2003325513A (ja) * | 2002-05-16 | 2003-11-18 | Aloka Co Ltd | 超音波診断装置 |
| JP2004057379A (ja) * | 2002-07-26 | 2004-02-26 | Aloka Co Ltd | 超音波診断装置 |
| WO2005096948A1 (ja) * | 2004-04-08 | 2005-10-20 | Matsushita Electric Industrial Co., Ltd. | 超音波診断装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20130142010A1 (en) | 2013-06-06 |
| JPWO2012017827A1 (ja) | 2013-10-03 |
| CN103068315A (zh) | 2013-04-24 |
| US9241685B2 (en) | 2016-01-26 |
| EP2601892A4 (en) | 2017-10-11 |
| WO2012017827A1 (ja) | 2012-02-09 |
| EP2601892A1 (en) | 2013-06-12 |
| CN103068315B (zh) | 2015-03-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5784607B2 (ja) | 超音波画像装置と三次元画像表示方法 | |
| JP7167285B2 (ja) | 超音波システム及び乳房組織撮像のための方法 | |
| KR101182880B1 (ko) | 영상 지시자를 제공하는 초음파 시스템 및 방법 | |
| EP3013243B1 (en) | Elastography measurement system and method | |
| JP5738507B2 (ja) | 超音波プローブの軌跡表現装置及び超音波診断装置 | |
| US8535231B2 (en) | Ultrasonic diagnostic apparatus | |
| CN100556360C (zh) | 超声波探头轨迹显示装置及方法和超声波诊断装置及方法 | |
| WO2013161277A1 (ja) | 超音波診断装置およびその制御方法 | |
| EP2036500A1 (en) | Ultrasound diagnostic apparatus | |
| WO2014034948A1 (ja) | 超音波診断装置及び画像処理方法 | |
| KR102442178B1 (ko) | 초음파 진단장치 및 그에 따른 초음파 진단 방법 | |
| US20120289830A1 (en) | Method and ultrasound imaging system for image-guided procedures | |
| WO2021033446A1 (ja) | 超音波診断装置、及び超音波診断装置の制御方法 | |
| JP2009089736A (ja) | 超音波診断装置 | |
| CN111629671A (zh) | 超声成像设备及控制超声成像设备的方法 | |
| CN111671461A (zh) | 超声波诊断装置及显示方法 | |
| JP2016523164A (ja) | 解剖学的にインテリジェントな心エコー検査法における肋骨妨害物描出 | |
| JP4865575B2 (ja) | 超音波診断装置 | |
| RU2620865C2 (ru) | Система и способ трехмерных ультразвуковых измерений объемных областей | |
| CN112545551A (zh) | 用于医学成像设备的方法和系统 | |
| JP4634814B2 (ja) | 超音波診断装置 | |
| KR100875620B1 (ko) | 초음파 영상 시스템 및 방법 | |
| EP3826542B1 (en) | Ultrasound system and method for guided shear wave elastography of anisotropic tissue | |
| JP2005006770A (ja) | 超音波診断装置 | |
| JP2009061076A (ja) | 超音波診断装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140630 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140630 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150109 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150407 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150413 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150707 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150722 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5784607 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |