JP5782844B2 - 搬送装置、印刷装置、及び搬送方法 - Google Patents
搬送装置、印刷装置、及び搬送方法 Download PDFInfo
- Publication number
- JP5782844B2 JP5782844B2 JP2011128961A JP2011128961A JP5782844B2 JP 5782844 B2 JP5782844 B2 JP 5782844B2 JP 2011128961 A JP2011128961 A JP 2011128961A JP 2011128961 A JP2011128961 A JP 2011128961A JP 5782844 B2 JP5782844 B2 JP 5782844B2
- Authority
- JP
- Japan
- Prior art keywords
- transport
- roller
- amount
- medium
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Description
Claims (5)
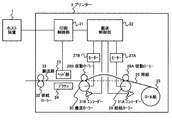
- シート状の被処理媒体を搬送路に送り出す上流側ローラーと、当該送り出された媒体を処理位置に供給する下流側ローラーと、前記被処理媒体を一定速度で搬送するために、当該一定速度を目標速度として、前記上流側ローラー及び前記下流側ローラーの駆動を制御する制御部と、前記両ローラー間の前記被処理媒体のたるみ量を検知するたるみ検知器と、を備える搬送装置であって、
前記制御部は、当該搬送動作の開始時点からの前記上流側ローラーによる搬送量と前記下流側ローラーによる搬送量との差である搬送量差に基づいて、当該搬送量差がなくなるように、前記上流側ローラーの前記目標速度を変更し、前記たるみ検知器が、前記被処理媒体のたるみ量が予め定められた上限値又は下限値に達したことを検知した以降は、前記搬送量差を、前記たるみ量が一定に保つべき値である場合に前記上流側ローラーと前記下流側ローラーの間に存在する前記被処理媒体の長さと、前記上限値又は下限値に達した際に前記上流側ローラーと前記下流側ローラーの間に存在する前記被処理媒体の長さの差分に変更して、前記目標速度の変更処理を行う
ことを特徴とする搬送装置。 - シート状の被処理媒体を搬送路に送り出す上流側ローラーと、当該送り出された媒体を処理位置に供給する下流側ローラーと、前記被処理媒体を一定速度で搬送するために、当該一定速度を目標速度として、前記上流側ローラー及び前記下流側ローラーの駆動を制御する制御部と、前記両ローラー間の前記被処理媒体のたるみ量を検知するたるみ検知器と、を備える搬送装置であって、
前記制御部は、搬送開始から搬送停止までの各搬送動作において、前記下流側ローラーの起動タイミングを前記上流側ローラーの起動タイミングよりも遅らせ、当該搬送動作の開始時点からの前記上流側ローラーによる搬送量と前記下流側ローラーによる搬送量との差である搬送量差に基づいて、当該搬送量差がなくなるように、前記上流側ローラーの前記一定速度の目標速度を変更し、前記たるみ検知器が、前記被処理媒体のたるみ量が予め定められた上限値又は下限値に達したことを検知した際は、前記搬送動作を停止する
ことを特徴とする搬送装置。 - 請求項1あるいは2に記載の搬送装置を備え、前記処理位置で前記被処理媒体に印刷を実行する印刷装置。
- シート状の被処理媒体を搬送路に送り出す上流側ローラーと、当該送り出された媒体を処理位置に供給する下流側ローラーと、前記被処理媒体を一定速度で搬送するために、当該一定速度を目標速度として、前記上流側ローラー及び前記下流側ローラーの駆動を制御する制御部と、前記両ローラー間の前記被処理媒体のたるみ量を検知するたるみ検知器と、を備える搬送装置における搬送方法であって、
前記制御部が、当該搬送動作の開始時点からの前記上流側ローラーによる搬送量と前記下流側ローラーによる搬送量との差である搬送量差に基づいて、当該搬送量差がなくなるように、前記上流側ローラーの前記目標速度を変更し、前記たるみ検知器が、前記被処理媒体のたるみ量が予め定められた上限値又は下限値に達したことを検知した以降は、前記搬送量差を、前記たるみ量が一定に保つべき値である場合に前記上流側ローラーと前記下流側ローラーの間に存在する前記被処理媒体の長さと、前記上限値又は下限値に達した際に前記上流側ローラーと前記下流側ローラーの間に存在する前記被処理媒体の長さの差分に変更して、前記目標速度の変更処理を行う
ことを特徴とする搬送方法。 - シート状の被処理媒体を搬送路に送り出す上流側ローラーと、当該送り出された媒体を処理位置に供給する下流側ローラーと、前記被処理媒体を一定速度で搬送するために、当該一定速度を目標速度として、前記上流側ローラー及び前記下流側ローラーの駆動を制御する制御部と、前記両ローラー間の前記被処理媒体のたるみ量を検知するたるみ検知器と、を備える搬送装置における搬送方法であって、
前記制御部が、搬送開始から搬送停止までの各搬送動作において、前記下流側ローラーの起動タイミングを前記上流側ローラーの起動タイミングよりも遅らせ、当該搬送動作の開始時点からの前記上流側ローラーによる搬送量と前記下流側ローラーによる搬送量との差である搬送量差に基づいて、当該搬送量差がなくなるように、前記上流側ローラーの前記一定速度の目標速度を変更し、前記たるみ検知器が、前記被処理媒体のたるみ量が予め定められた上限値又は下限値に達したことを検知した際は、前記搬送動作を停止する
ことを特徴とする搬送方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011128961A JP5782844B2 (ja) | 2011-06-09 | 2011-06-09 | 搬送装置、印刷装置、及び搬送方法 |
| CN201210181741.5A CN102815557B (zh) | 2011-06-08 | 2012-06-04 | 输送装置、印刷装置以及输送方法 |
| TW101120164A TWI481511B (zh) | 2011-06-08 | 2012-06-05 | 搬送裝置、印刷裝置及搬送方法 |
| US13/491,011 US9457600B2 (en) | 2011-06-08 | 2012-06-07 | Conveyance device, printing device, and conveyance method |
| EP12171311.9A EP2535195B1 (en) | 2011-06-08 | 2012-06-08 | Conveyance device, printing device, and conveyance method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011128961A JP5782844B2 (ja) | 2011-06-09 | 2011-06-09 | 搬送装置、印刷装置、及び搬送方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012254862A JP2012254862A (ja) | 2012-12-27 |
| JP2012254862A5 JP2012254862A5 (ja) | 2014-07-31 |
| JP5782844B2 true JP5782844B2 (ja) | 2015-09-24 |
Family
ID=47526827
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011128961A Expired - Fee Related JP5782844B2 (ja) | 2011-06-08 | 2011-06-09 | 搬送装置、印刷装置、及び搬送方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5782844B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015117125A (ja) | 2013-12-20 | 2015-06-25 | セイコーエプソン株式会社 | 媒体搬送制御方法およびプリンター |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005231829A (ja) * | 2004-02-20 | 2005-09-02 | Ricoh Printing Systems Ltd | ウェブ搬送装置 |
| JP4774840B2 (ja) * | 2005-07-08 | 2011-09-14 | 富士ゼロックス株式会社 | 画像形成装置、及び重連印刷装置、並びに連続紙搬送制御方法 |
| JP2007264551A (ja) * | 2006-03-30 | 2007-10-11 | Oki Data Corp | 媒体搬送装置及び画像形成装置 |
| JP4379451B2 (ja) * | 2006-08-29 | 2009-12-09 | セイコーエプソン株式会社 | 印刷装置および連続印刷のための印刷媒体の搬送制御方法 |
| JP2008201522A (ja) * | 2007-02-19 | 2008-09-04 | Seiko Epson Corp | 媒体搬送装置、及び、媒体搬送方法 |
| JP2010274483A (ja) * | 2009-05-27 | 2010-12-09 | Canon Inc | 記録装置および記録媒体の搬送制御方法 |
| JP5177242B2 (ja) * | 2011-02-03 | 2013-04-03 | ブラザー工業株式会社 | インクジェット記録装置 |
-
2011
- 2011-06-09 JP JP2011128961A patent/JP5782844B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012254862A (ja) | 2012-12-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI481511B (zh) | 搬送裝置、印刷裝置及搬送方法 | |
| US8292286B2 (en) | Image forming apparatus | |
| JP6718368B2 (ja) | 搬送装置及びそれを備えた印刷装置 | |
| TWI457267B (zh) | 搬送裝置、印刷裝置、及搬送方法 | |
| JP5838990B2 (ja) | 搬送システム、画像形成システム及び制御デバイス | |
| JP5782844B2 (ja) | 搬送装置、印刷装置、及び搬送方法 | |
| JP5874205B2 (ja) | 搬送装置、印刷装置、及び搬送方法 | |
| EP2857334B1 (en) | Conveyance device, printer, and conveyance method | |
| US20150091238A1 (en) | Sheet transport apparatus and image forming system | |
| US11975532B2 (en) | Transport device, printing apparatus, and transport controlling method | |
| JP6210703B2 (ja) | プリンタ装置の制御方法及びプリンタ装置 | |
| JP4749310B2 (ja) | 画像形成装置 | |
| JP6045263B2 (ja) | 記録装置及び制御方法 | |
| JP5736969B2 (ja) | 搬送装置、印刷装置、及び搬送方法 | |
| JP5790154B2 (ja) | 搬送装置、印刷装置、及び搬送方法 | |
| JP7409164B2 (ja) | シート搬送装置及び画像形成システム | |
| JP5899972B2 (ja) | 印刷装置、及び印刷装置の搬送方法 | |
| JP2013001486A (ja) | 搬送装置、印刷装置、及び搬送方法 | |
| JP2013018602A (ja) | 搬送装置、印刷装置、及び搬送方法 | |
| US9227809B2 (en) | Conveyance apparatus and recording apparatus | |
| JP4818829B2 (ja) | 印刷装置、搬送装置、及び印刷方法 | |
| JP6535995B2 (ja) | シート搬送制御システム、シート搬送制御方法およびシート搬送装置 | |
| JP5907604B2 (ja) | シート搬送装置 | |
| JP5839982B2 (ja) | シート搬送装置 | |
| JP5862105B2 (ja) | 搬送装置、印刷装置、及び搬送方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140609 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140609 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150319 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150331 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150529 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150623 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150706 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5782844 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |