JP5744382B2 - Substrate processing apparatus and substrate processing method - Google Patents
Substrate processing apparatus and substrate processing method Download PDFInfo
- Publication number
- JP5744382B2 JP5744382B2 JP2009108671A JP2009108671A JP5744382B2 JP 5744382 B2 JP5744382 B2 JP 5744382B2 JP 2009108671 A JP2009108671 A JP 2009108671A JP 2009108671 A JP2009108671 A JP 2009108671A JP 5744382 B2 JP5744382 B2 JP 5744382B2
- Authority
- JP
- Japan
- Prior art keywords
- cleaning
- wafer
- polishing
- substrate
- transfer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000758 substrate Substances 0.000 title claims description 252
- 238000012545 processing Methods 0.000 title claims description 80
- 238000003672 processing method Methods 0.000 title claims description 8
- 238000004140 cleaning Methods 0.000 claims description 326
- 238000005498 polishing Methods 0.000 claims description 305
- 238000012546 transfer Methods 0.000 claims description 247
- 230000007246 mechanism Effects 0.000 claims description 168
- 238000001035 drying Methods 0.000 claims description 60
- 238000005406 washing Methods 0.000 claims description 10
- 230000007723 transport mechanism Effects 0.000 claims description 9
- 235000012431 wafers Nutrition 0.000 description 291
- KFZMGEQAYNKOFK-UHFFFAOYSA-N Isopropanol Chemical compound CC(C)O KFZMGEQAYNKOFK-UHFFFAOYSA-N 0.000 description 147
- 230000032258 transport Effects 0.000 description 109
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 92
- 239000007788 liquid Substances 0.000 description 73
- 239000007789 gas Substances 0.000 description 58
- 239000012530 fluid Substances 0.000 description 39
- 230000005587 bubbling Effects 0.000 description 26
- 238000006073 displacement reaction Methods 0.000 description 21
- 238000010586 diagram Methods 0.000 description 18
- 238000012423 maintenance Methods 0.000 description 18
- 239000002002 slurry Substances 0.000 description 18
- 238000003825 pressing Methods 0.000 description 17
- 238000000034 method Methods 0.000 description 16
- 238000009826 distribution Methods 0.000 description 15
- 230000008569 process Effects 0.000 description 15
- 230000006870 function Effects 0.000 description 14
- 230000002093 peripheral effect Effects 0.000 description 14
- 230000033001 locomotion Effects 0.000 description 12
- 238000012544 monitoring process Methods 0.000 description 12
- 230000003028 elevating effect Effects 0.000 description 10
- 230000002829 reductive effect Effects 0.000 description 8
- 239000000126 substance Substances 0.000 description 8
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 6
- 229910001873 dinitrogen Inorganic materials 0.000 description 6
- 238000000227 grinding Methods 0.000 description 6
- 229910052751 metal Inorganic materials 0.000 description 6
- 239000002184 metal Substances 0.000 description 6
- 230000003287 optical effect Effects 0.000 description 6
- 239000002245 particle Substances 0.000 description 6
- 230000007423 decrease Effects 0.000 description 5
- 238000002347 injection Methods 0.000 description 5
- 239000007924 injection Substances 0.000 description 5
- 239000000463 material Substances 0.000 description 5
- 239000013307 optical fiber Substances 0.000 description 5
- 238000005192 partition Methods 0.000 description 5
- 230000001105 regulatory effect Effects 0.000 description 5
- 239000000243 solution Substances 0.000 description 5
- 238000011144 upstream manufacturing Methods 0.000 description 5
- CURLTUGMZLYLDI-UHFFFAOYSA-N Carbon dioxide Chemical compound O=C=O CURLTUGMZLYLDI-UHFFFAOYSA-N 0.000 description 4
- 230000008901 benefit Effects 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 238000001228 spectrum Methods 0.000 description 4
- 238000005299 abrasion Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 3
- 239000000919 ceramic Substances 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 239000003638 chemical reducing agent Substances 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 238000010790 dilution Methods 0.000 description 3
- 239000012895 dilution Substances 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000005530 etching Methods 0.000 description 3
- 239000011347 resin Substances 0.000 description 3
- 229920005989 resin Polymers 0.000 description 3
- 230000004043 responsiveness Effects 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 239000006061 abrasive grain Substances 0.000 description 2
- 229910002092 carbon dioxide Inorganic materials 0.000 description 2
- 239000001569 carbon dioxide Substances 0.000 description 2
- 239000000470 constituent Substances 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 230000007797 corrosion Effects 0.000 description 2
- 238000005260 corrosion Methods 0.000 description 2
- 229910003460 diamond Inorganic materials 0.000 description 2
- 239000010432 diamond Substances 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 229910052755 nonmetal Inorganic materials 0.000 description 2
- 238000007517 polishing process Methods 0.000 description 2
- 238000009790 rate-determining step (RDS) Methods 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000003014 reinforcing effect Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 1
- 239000004696 Poly ether ether ketone Substances 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- BZHJMEDXRYGGRV-UHFFFAOYSA-N Vinyl chloride Chemical compound ClC=C BZHJMEDXRYGGRV-UHFFFAOYSA-N 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 239000003570 air Substances 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- JUPQTSLXMOCDHR-UHFFFAOYSA-N benzene-1,4-diol;bis(4-fluorophenyl)methanone Chemical compound OC1=CC=C(O)C=C1.C1=CC(F)=CC=C1C(=O)C1=CC=C(F)C=C1 JUPQTSLXMOCDHR-UHFFFAOYSA-N 0.000 description 1
- 238000007664 blowing Methods 0.000 description 1
- 229910052799 carbon Inorganic materials 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000002542 deteriorative effect Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000001704 evaporation Methods 0.000 description 1
- 230000008020 evaporation Effects 0.000 description 1
- 230000020169 heat generation Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 239000003595 mist Substances 0.000 description 1
- 229910001172 neodymium magnet Inorganic materials 0.000 description 1
- 229920002530 polyetherether ketone Polymers 0.000 description 1
- 229920002635 polyurethane Polymers 0.000 description 1
- 239000004814 polyurethane Substances 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000008929 regeneration Effects 0.000 description 1
- 238000011069 regeneration method Methods 0.000 description 1
- 239000012779 reinforcing material Substances 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 230000003595 spectral effect Effects 0.000 description 1
- 239000007921 spray Substances 0.000 description 1
- 238000005507 spraying Methods 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000008646 thermal stress Effects 0.000 description 1
- 231100000331 toxic Toxicity 0.000 description 1
- 230000002588 toxic effect Effects 0.000 description 1
- 239000002341 toxic gas Substances 0.000 description 1
- 238000002834 transmittance Methods 0.000 description 1
- 229910021642 ultra pure water Inorganic materials 0.000 description 1
- 239000012498 ultrapure water Substances 0.000 description 1
- 238000009834 vaporization Methods 0.000 description 1
- 230000008016 vaporization Effects 0.000 description 1
Images

































Landscapes
- Mechanical Treatment Of Semiconductor (AREA)
- Cleaning Or Drying Semiconductors (AREA)
- Constituent Portions Of Griding Lathes, Driving, Sensing And Control (AREA)
- Finish Polishing, Edge Sharpening, And Grinding By Specific Grinding Devices (AREA)
Description
本発明は、基板処理装置および基板処理方法に関し、特に半導体ウェハなどの基板を平坦に研磨するために用いられる基板処理装置および基板処理方法に関するものである。 The present invention relates to a substrate processing apparatus and a substrate processing method, and more particularly to a substrate processing apparatus and a substrate processing method used for polishing a substrate such as a semiconductor wafer flatly.
近年、半導体デバイスの高集積化が進むにつれて回路の配線が微細化し、配線間距離もより狭くなりつつある。半導体デバイスの製造では、シリコンウェハの上に多くの種類の材料が膜状に繰り返し形成され、積層構造を形成する。この積層構造を形成するためには、ウェハの表面を平坦にする技術が重要となっている。このようなウェハの表面を平坦化する一手段として、化学機械研磨(CMP)を行う研磨装置(化学的機械的研磨装置ともいう)が広く用いられている。 In recent years, as semiconductor devices are highly integrated, circuit wiring is becoming finer and the distance between wirings is becoming narrower. In the manufacture of semiconductor devices, many types of materials are repeatedly formed in a film shape on a silicon wafer to form a laminated structure. In order to form this laminated structure, a technique for flattening the surface of the wafer is important. As one means for flattening the surface of such a wafer, a polishing apparatus (also referred to as a chemical mechanical polishing apparatus) that performs chemical mechanical polishing (CMP) is widely used.
この化学機械研磨(CMP)装置は、一般に、研磨パッドが取り付けられた研磨テーブルと、ウェハを保持するトップリングと、研磨液を研磨パッド上に供給するノズルとを備えている。ノズルから研磨液を研磨パッド上に供給しながら、トップリングによりウェハを研磨パッドに押し付け、さらにトップリングと研磨テーブルとを相対移動させることにより、ウェハを研磨してその表面を平坦にする。 This chemical mechanical polishing (CMP) apparatus generally includes a polishing table to which a polishing pad is attached, a top ring that holds a wafer, and a nozzle that supplies a polishing liquid onto the polishing pad. While supplying the polishing liquid onto the polishing pad from the nozzle, the wafer is pressed against the polishing pad by the top ring, and the top ring and the polishing table are moved relative to each other to polish the wafer and flatten the surface.
基板処理装置は、このようなCMP装置に加え、研磨後のウェハを洗浄し、さらに乾燥させる機能を有する装置である。このような基板処理装置においては、基板処理のスループットを向上することが求められている。基板処理装置は、研磨や洗浄などを行う種々の処理部を有しているため、各処理部での処理の遅延は、基板処理装置全体のスループットを低下させてしまう。例えば、従来の基板処理装置では、複数の研磨ユニットが設けられているのに対して、一つの洗浄ラインのみが設けられていたため、複数の研磨されたウェハを同時に洗浄し、乾燥することができなかった。また、洗浄ライン上の複数の処理工程(一次洗浄、二次洗浄、乾燥など)のうち、処理時間が最も遅い処理工程がプロセス全体の律速工程となってしまい、これが、プロセス全体の処理時間(スループット)を決定付けることもあった。 In addition to such a CMP apparatus, the substrate processing apparatus is an apparatus having a function of cleaning and further drying a polished wafer. In such a substrate processing apparatus, it is required to improve the throughput of the substrate processing. Since the substrate processing apparatus includes various processing units that perform polishing, cleaning, and the like, a delay in processing in each processing unit decreases the throughput of the entire substrate processing apparatus. For example, in a conventional substrate processing apparatus, a plurality of polishing units are provided, but only one cleaning line is provided, so that a plurality of polished wafers can be simultaneously cleaned and dried. There wasn't. In addition, among the plurality of processing steps on the cleaning line (primary cleaning, secondary cleaning, drying, etc.), the processing step with the slowest processing time becomes the rate-limiting step for the entire process, which is the processing time for the entire process ( (Throughput) was also determined.
基板処理装置全体のスループットは、研磨部や洗浄部などの処理部のみならず、ウェハを搬送する搬送機構にも影響されることがある。さらに、トップリングと搬送機構との間でのウェハの受け渡し動作も全体のスループットに影響を与える。このように、基板処理装置全体のスループットは、種々の処理工程および搬送工程に依存する。 The throughput of the entire substrate processing apparatus may be influenced not only by processing units such as a polishing unit and a cleaning unit, but also by a transfer mechanism that transfers the wafer. Furthermore, the wafer transfer operation between the top ring and the transfer mechanism also affects the overall throughput. Thus, the overall throughput of the substrate processing apparatus depends on various processing steps and transfer steps.
例えば、基板処理装置は、複数の研磨ユニット間でウェハを搬送するためのリニアトランスポータを有している。このリニアトランスポータは、ウェハを水平方向に直線的に移動させて、各研磨ユニットのウェハ受け渡し位置までウェハを搬送する。その後、ウェハは、ニリアトランスポータとは別に設けられたプッシャーによりトップリングに向かって押し上げられる。このように、ウェハの水平移動と上下移動は、それぞれリニアトランスポータおよびプッシャーによって別々に行われるため、ウェハの搬送に要する時間が長くなる。 For example, the substrate processing apparatus has a linear transporter for transporting a wafer between a plurality of polishing units. The linear transporter moves the wafer linearly in the horizontal direction and conveys the wafer to the wafer delivery position of each polishing unit. Thereafter, the wafer is pushed up toward the top ring by a pusher provided separately from the Nilia transporter. As described above, since the horizontal movement and the vertical movement of the wafer are separately performed by the linear transporter and the pusher, the time required for transporting the wafer becomes long.
また、プッシャーはウェハの受け渡し位置に研磨ユニットごとに設ける必要があり、さらに、トップリングとプッシャーとの間でのウェハの受け渡し位置を微調整するためのXYステージを設ける必要がある。このため、ウェハの搬送機構全体が構造的に複雑となり、また付随する配線や配管を多数配置する必要がある。さらに、この搬送機構が故障した場合には、ウェハ受け渡し位置にアクセスする必要があり復旧作業が困難となる場合も予想される。 Further, it is necessary to provide a pusher for each polishing unit at the wafer delivery position, and it is also necessary to provide an XY stage for finely adjusting the wafer delivery position between the top ring and the pusher. For this reason, the entire wafer transport mechanism is structurally complicated, and it is necessary to arrange a large number of associated wiring and piping. Furthermore, when this transfer mechanism fails, it may be necessary to access the wafer transfer position, and it may be difficult to perform a recovery operation.
故障やメンテナンスによる基板処理装置のダウンタイムが長くなると、ウェハ処理のコスト上昇につながる。このため、最近では、容易にメンテナンス作業を行うことができる基板処理装置が要望され、さらには、部品の数を少なくして構造をシンプルにし、コストダウンを図ることも要望されている。 If the downtime of the substrate processing apparatus due to failure or maintenance becomes longer, the cost of wafer processing increases. For this reason, recently, there has been a demand for a substrate processing apparatus that can easily perform maintenance work, and further, there is a demand for reducing the number of parts, simplifying the structure, and reducing costs.
例えば、トップリングは、研磨パッド上の研磨位置とウェハの受け渡し位置との間を揺動するため、トップリングの揺動機構は定期的なメンテナンスを必要とする。この揺動機構は、トップリングの旋回軸を支持するベアリング、旋回軸を駆動するモータおよび減速機などから構成されている。トップリングを支持するトップリングヘッドは、比較的長い旋回軸の上端に固定され、下端に減速機とモータが連結される。ベアリングの外側にはベアリングケースが配置され、このベアリングケースは、研磨室とその下の室との間を隔てるポリッシャパンを貫通している。さらに、ベアリングケースは、ポリッシャパンの下に設置されている。このように、トップリングおよびトップリングヘッドを含むトップリング組立体は比較的長物で重量があるため、そのメンテナンスの点で不都合がある場合があった。 For example, since the top ring swings between a polishing position on the polishing pad and a wafer transfer position, the swing mechanism of the top ring requires regular maintenance. This swing mechanism is composed of a bearing that supports the pivot shaft of the top ring, a motor that drives the pivot shaft, a speed reducer, and the like. The top ring head that supports the top ring is fixed to the upper end of a relatively long pivot, and the speed reducer and the motor are connected to the lower end. A bearing case is disposed outside the bearing, and this bearing case passes through a polisher pan that separates the polishing chamber from the chamber below it. Furthermore, the bearing case is installed under the polisher pan. As described above, since the top ring assembly including the top ring and the top ring head is relatively long and heavy, it may be inconvenient in terms of maintenance.
本発明は、上述した事情に鑑みてなされたもので、高スループットを実現することができる基板処理装置および基板処理方法を提供することを目的とする。 The present invention has been made in view of the above-described circumstances, and an object thereof is to provide a substrate processing apparatus and a substrate processing method capable of realizing high throughput.
上述した目的を達成するために、本発明の一態様は、複数の基板をそれぞれ研磨する複数の研磨ユニットを有する研磨部と、複数の基板を連続的に搬送する搬送機構と、研磨された基板を洗浄し乾燥する洗浄部とを備えた基板処理装置であって、前記洗浄部は、複数の基板を並列に洗浄するための複数の並列した洗浄ラインと、前記搬送機構によって連続的に搬送される複数の基板を前記複数の並列した洗浄ラインのいずれかに振り分ける第1搬送ロボットおよび第2搬送ロボットとを有し、前記複数の並列した洗浄ラインは、基板を一次洗浄するための複数の一次洗浄モジュールと、基板を二次洗浄するための複数の二次洗浄モジュールを有しており、前記一次洗浄モジュールおよび前記二次洗浄モジュールは、それぞれ縦方向に沿って配列されており、前記第1搬送ロボットは、縦方向に延びる第1の支持軸に沿って上下に移動して前記複数の一次洗浄モジュールおよび前記複数の二次洗浄モジュールにアクセス可能となっており、前記第2搬送ロボットは、縦方向に延びる第2の支持軸に沿って上下に移動して前記複数の二次洗浄モジュールにアクセス可能となっており、前記基板処理装置は、前記一次洗浄モジュールおよび前記二次洗浄モジュールの故障を検知する検知器と、前記検知器が前記一次洗浄モジュールおよび前記二次洗浄モジュールのうちのいずれかの故障を検知したとき、該故障した洗浄モジュールを回避する洗浄ラインを選定し、該選定された洗浄ラインに切り替える制御部をさらに備え、前記複数の一次洗浄モジュールのうちのいずれかが基板を洗浄中であるか、または故障している場合は、前記制御部は、前記複数の一次洗浄モジュールのうち基板の洗浄を行っていない、または故障していない一次洗浄モジュールに基板を搬送するよう前記第1搬送ロボットを制御することを特徴とする基板処理装置である。
本発明によれば、複数の基板が連続的に洗浄部に搬入されてくる場合でも、必要に応じて複数の洗浄ラインに基板を振り分けることができ、これら複数の基板を並行して洗浄することができる。また、基板の洗浄または乾燥に必要とされる時間に応じて、基板を複数の洗浄ラインのいずれかに振り分けることができるため、プロセス全体のスループットを向上させることができる。さらに、複数の洗浄ラインでの処理時間を平準化するようにすれば、さらにプロセス全体のスループットを向上させることができる。
なお、本明細書において、「洗浄ライン」とは、基板が投入される洗浄部の内部において、一つの基板が複数の洗浄モジュールによって洗浄される際の移動経路のことである。本発明における洗浄部は、1枚の基板を連続的に洗浄する機能を有しながら、複数の基板を同時に洗浄する機能も有するという利点がある。
Substrate in order to achieve the above object, an aspect of the present invention includes a polishing unit having a plurality of polishing units for polishing a plurality of substrates, respectively, and the transport mechanism for transporting a plurality of substrates continuously, which is polished A cleaning unit that cleans and dries the substrate, wherein the cleaning unit is continuously transported by a plurality of parallel cleaning lines for cleaning a plurality of substrates in parallel and the transport mechanism. A first transfer robot and a second transfer robot for distributing the plurality of substrates to any of the plurality of parallel cleaning lines, wherein the plurality of parallel cleaning lines includes a plurality of primary for primary cleaning of the substrate. A cleaning module and a plurality of secondary cleaning modules for performing secondary cleaning of the substrate. The primary cleaning module and the secondary cleaning module are each arranged in a vertical direction. The first transport robot moves up and down along a first support shaft extending in the vertical direction to be able to access the plurality of primary cleaning modules and the plurality of secondary cleaning modules; The second transfer robot moves up and down along a second support shaft extending in the vertical direction to be able to access the plurality of secondary cleaning modules. The substrate processing apparatus includes the primary cleaning module, A detector that detects a failure of the secondary cleaning module, and a cleaning line that avoids the failed cleaning module when the detector detects a failure of either the primary cleaning module or the secondary cleaning module select a, further comprising a control unit for switching to the selected the cleaning line in the cleaning either the substrate of the plurality of primary cleaning module In the case where there is a failure or the failure, the control unit performs the first transfer so as to transfer the substrate to the primary cleaning module that is not cleaning or does not perform the substrate cleaning among the plurality of primary cleaning modules. A substrate processing apparatus that controls a robot .
According to the present invention, even when a plurality of substrates are continuously carried into the cleaning unit, the substrates can be distributed to a plurality of cleaning lines as needed, and the plurality of substrates can be cleaned in parallel. Can do. In addition, since the substrate can be distributed to any of a plurality of cleaning lines according to the time required for cleaning or drying the substrate, the throughput of the entire process can be improved. Furthermore, if the processing times in the plurality of cleaning lines are leveled, the throughput of the entire process can be further improved.
In the present specification, the “cleaning line” refers to a movement path when a single substrate is cleaned by a plurality of cleaning modules inside the cleaning unit into which the substrate is loaded. The cleaning unit in the present invention has an advantage of having a function of cleaning a plurality of substrates simultaneously while having a function of cleaning a single substrate continuously.
上記本発明の態様によれば、前記洗浄部は、基板を前記複数の洗浄ラインのいずれかに振り分ける振分機構としての第1搬送ロボットおよび第2搬送ロボットを有することを特徴とする。このように構成すれば、複数の洗浄ライン間の処理時間に応じて基板(ウェハ)を振り分けることができるので、洗浄ラインの処理時間を平準化することができる。
上記本発明の態様によれば、前記複数の洗浄ラインは、基板を一次洗浄するための複数の一次洗浄モジュールと、基板を二次洗浄するための複数の二次洗浄モジュールを有することを特徴とする。このように構成すれば、ある洗浄モジュールが故障した場合は、基板の洗浄処理を停止させることなく、洗浄モジュールを修理、または新たな洗浄モジュールに交換することができる。
上記本発明の態様によれば、前記複数の一次洗浄モジュールは縦方向に沿って配列されており、前記複数の二次洗浄モジュールは縦方向に沿って配列されていることを特徴とする。このように構成すれば、フットプリント(クリーンルームなどに設置した装置の設置面積)を小さくすることができる。なお、この場合、複数の一次洗浄モジュール間で、または複数の二次洗浄モジュール間で基板を搬送することもできる。
According to an aspect of the present invention, the cleaning unit is characterized by having a first transfer robot and the second transport robot as sorting mechanism for distributing substrate to one of said plurality of cleaning lines. If comprised in this way, since a board | substrate (wafer) can be distributed according to the processing time between several cleaning lines, the processing time of a cleaning line can be equalized.
According to an aspect of the present invention, the plurality of cleaning lines, and characterized by having a plurality of primary cleaning module for cleaning the primary substrate, a plurality of secondary cleaning module for a substrate secondary wash To do. With this configuration, when a certain cleaning module fails, the cleaning module can be repaired or replaced with a new cleaning module without stopping the substrate cleaning process.
According to an aspect of the present invention, the plurality of primary cleaning module are arranged along the longitudinal direction, said plurality of secondary cleaning module is characterized in that it is arranged along the longitudinal direction. If comprised in this way, a footprint (installation area of the apparatus installed in the clean room etc.) can be made small. In this case, the substrate can be transported between a plurality of primary cleaning modules or between a plurality of secondary cleaning modules.
上記本発明の態様によれば、前記洗浄部は、前記複数の一次洗浄モジュールおよび前記複数の二次洗浄モジュールにアクセス可能な第1搬送ロボットと、前記複数の二次洗浄モジュールにアクセス可能な第2搬送ロボットとを有することを特徴とする。このように構成すれば、2つの搬送ロボットによって基板を迅速かつ確実に搬送することができる。
本発明の好ましい態様は、前記複数の並列した洗浄ラインは、一時的に基板が置かれる仮置き台を有することを特徴とする。このように構成すれば、基板の洗浄モジュールへの投入および取り出しの時間の調整や、洗浄部内の基板の搬送経路をフレキシブルに変更することができる。
本発明の好ましい態様は、前記洗浄部は、前記複数の並列した洗浄ラインにより洗浄された複数の基板を乾燥させる複数の乾燥モジュールを有することを特徴とする。このように構成すれば、基板を乾燥した状態で基板処理装置から搬出することができるので、ドライイン−ドライアウト型の基板処理装置を提供することができる。
本発明の好ましい態様は、前記複数の乾燥モジュールは、縦方向に沿って配列されていることを特徴とする。このように構成すれば、フットプリントを少なくすることができる。
本発明の好ましい態様は、前記第1搬送ロボットは、上下2段の2つのハンドを有し、下側のハンドは洗浄前の基板を搬送するために使用され、上側のハンドは洗浄後の基板を搬送するために使用されることを特徴とする。
本発明の好ましい態様は、前記第2搬送ロボットは、洗浄後の基板を搬送するための1つのハンドを有することを特徴とする。
According to the aspect of the present invention, the cleaning unit includes a first transfer robot that can access the plurality of primary cleaning modules and the plurality of secondary cleaning modules, and a first transport robot that can access the plurality of secondary cleaning modules. It has 2 conveyance robots. If comprised in this way, a board | substrate can be conveyed rapidly and reliably by two conveyance robots.
In a preferred aspect of the present invention, the plurality of parallel cleaning lines include a temporary table on which a substrate is temporarily placed. If comprised in this way, the adjustment | control of the injection | throwing-in and taking-out time of a board | substrate to the cleaning module, and the conveyance path | route of the board | substrate in a washing | cleaning part can be changed flexibly.
In a preferred aspect of the present invention, the cleaning unit includes a plurality of drying modules that dry the plurality of substrates cleaned by the plurality of parallel cleaning lines. If comprised in this way, since a board | substrate can be carried out from a substrate processing apparatus in the dried state, a dry-in / dry-out type substrate processing apparatus can be provided.
In a preferred aspect of the present invention, the plurality of drying modules are arranged along the vertical direction. If comprised in this way, a footprint can be decreased.
In a preferred aspect of the present invention, the first transport robot has two hands of upper and lower two stages, the lower hand is used to transport the substrate before cleaning, and the upper hand is the substrate after cleaning. It is used for conveying.
In a preferred aspect of the present invention, the second transport robot has one hand for transporting the cleaned substrate.
本発明の他の態様は、複数の基板を研磨し、研磨された複数の基板を、複数の一次洗浄モジュールおよび複数の二次洗浄モジュールから構成される複数の並列した洗浄ラインに連続的に搬送し、前記一次洗浄モジュールおよび前記二次洗浄モジュールは、それぞれ縦方向に沿って配列されており、前記複数の一次洗浄モジュールから前記複数の二次洗浄モジュールへの基板の搬送は、上下動可能な第1搬送ロボットによって行われ、前記複数の二次洗浄モジュールからの基板の搬出は、上下動可能な第2搬送ロボットによって行われ、前記複数の基板を、前記第1搬送ロボットおよび第2搬送ロボットによってそれぞれ前記複数の並列した洗浄ラインのいずれかに振り分け、前記複数の並列した洗浄ラインで前記複数の基板を並列に洗浄し、洗浄された前記複数の基板を乾燥し、前記一次洗浄モジュールおよび前記二次洗浄モジュールのうちのいずれかが故障したときは、該故障した洗浄モジュールを回避する洗浄ラインを選定し、前記選定された洗浄ラインに切り替え、前記複数の一次洗浄モジュールのうちのいずれかが基板を洗浄中であるか、または故障している場合は、前記複数の一次洗浄モジュールのうち基板の洗浄を行っていない、または故障していない一次洗浄モジュールに基板を搬送することを特徴とする基板処理方法である。本発明によれば、連続的に搬送される複数の基板を複数の洗浄ラインに振り分けることによって、これら複数の基板を並行して洗浄することができる。また、基板の洗浄または乾燥に必要とされる時間に応じて、基板を複数の洗浄ラインのいずれかに振り分けることができるため、プロセス全体のスループットを向上させることができる。さらに、複数の洗浄ラインでの処理時間を平準化するようにすれば、さらにプロセス全体のスループットを向上させることができる。 According to another aspect of the present invention, a plurality of substrates are polished, and the polished substrates are continuously transferred to a plurality of parallel cleaning lines including a plurality of primary cleaning modules and a plurality of secondary cleaning modules. The primary cleaning module and the secondary cleaning module are arranged along a vertical direction, and the substrate can be moved up and down from the plurality of primary cleaning modules to the plurality of secondary cleaning modules. The substrate is unloaded from the plurality of secondary cleaning modules by a first transfer robot, and is moved by a second transfer robot capable of moving up and down, and the plurality of substrates are transferred to the first transfer robot and the second transfer robot. by distributing any of each of the plurality of juxtaposed washing line to wash the plurality of substrates in parallel by the plurality of juxtaposed washing line, When the plurality of cleaned substrates are dried and one of the primary cleaning module and the secondary cleaning module fails, a cleaning line that avoids the failed cleaning module is selected and the selected Switch to a cleaning line and if any of the plurality of primary cleaning modules is cleaning the substrate or is out of order, the substrate is not cleaned among the plurality of primary cleaning modules, or A substrate processing method comprising transporting a substrate to a primary cleaning module that has not failed . According to the present invention, it is possible to clean a plurality of substrates in parallel by distributing a plurality of substrates transported continuously to a plurality of cleaning lines. In addition, since the substrate can be distributed to any of a plurality of cleaning lines according to the time required for cleaning or drying the substrate, the throughput of the entire process can be improved. Furthermore, if the processing times in the plurality of cleaning lines are leveled, the throughput of the entire process can be further improved.
また、前記複数の基板を並列に洗浄するので、複数の基板を短時間で洗浄することができる。
本発明の好ましい態様は、前記複数の基板を所定の時間差で洗浄することを特徴とする。このように、前記複数の基板を所定の時間差で洗浄するので、例えば洗浄後の基板を一枚ずつ搬送することが必要な場合は、搬送ロボットは基板を一定間隔をあけて連続的に搬出することができる。したがって、基板の搬送が律速とならず、プロセス全体のスループットを向上することができる。
Further, since the plurality of substrates are cleaned in parallel, the plurality of substrates can be cleaned in a short time.
In a preferred aspect of the present invention, the plurality of substrates are cleaned at a predetermined time difference. As described above, since the plurality of substrates are cleaned at a predetermined time difference, for example, when it is necessary to transport the cleaned substrates one by one, the transport robot continuously transports the substrates at regular intervals. be able to. Therefore, the transfer of the substrate is not rate limiting, and the throughput of the entire process can be improved.
本発明の一参考例は、基板に対する押圧力を流体の圧力により付与するトップリングを用いて基板を研磨する研磨部と、基板を搬送する搬送機構と、研磨された基板を洗浄し乾燥する洗浄部とを備えた基板処理装置であって、前記トップリングは、トップリングヘッドを介して支持軸に揺動可能に連結されており、前記流体の圧力を調整する圧力調整部を前記トップリングヘッドに設置したことを特徴とする基板処理装置である。 One reference example of the present invention is a polishing unit that polishes a substrate using a top ring that applies a pressing force to the substrate by a fluid pressure, a transport mechanism that transports the substrate, and a cleaning that cleans and dries the polished substrate. The top ring is swingably connected to a support shaft via a top ring head, and the pressure adjusting unit for adjusting the pressure of the fluid is connected to the top ring head. It is the substrate processing apparatus characterized by having installed in (1).
本参考例によれば、次のような従来の問題を解決することができる。従来の基板処理装置では、複数の研磨ユニットに対して1つの圧力調整部がトップリングヘッドの外部に設けられていた。そのため、複数の研磨ユニットのうちの一部の不具合のためにすべてのトップリングの圧力を調整する圧力調整部を停止させる必要があった。本参考例によれば、複数の研磨ユニットが研磨部に設けられる場合でも、それぞれの研磨ユニットのトップリングヘッドごとに圧力調整部が設けられるので、故障が生じていない研磨ユニットの運転は継続することができる。したがって、基板処理プロセス全体のスループットの低下を防止することができる。ここで、トップリングヘッドの軽量化の観点から、トップリングの回転機構および揺動機構の小型化を実現すること、およびトップリングヘッドやトップリングの構成部材(例えば、トップリングハウジング)を軽量な材料(たとえば、塩化ビニル樹脂、フッ素樹脂等)で形成することが好ましい。 According to this reference example , the following conventional problems can be solved. In the conventional substrate processing apparatus, one pressure adjusting unit is provided outside the top ring head for a plurality of polishing units. Therefore, it is necessary to stop the pressure adjusting unit that adjusts the pressures of all the top rings because of some defects in the plurality of polishing units. According to this reference example , even when a plurality of polishing units are provided in the polishing unit, since the pressure adjusting unit is provided for each top ring head of each polishing unit, the operation of the polishing unit in which no failure has occurred continues. be able to. Accordingly, it is possible to prevent a decrease in the throughput of the entire substrate processing process. Here, from the viewpoint of reducing the weight of the top ring head, it is possible to reduce the size of the rotation mechanism and swing mechanism of the top ring, and to reduce the weight of the top ring head and the constituent members of the top ring (for example, top ring housing). It is preferable to form with materials (for example, vinyl chloride resin, fluororesin, etc.).
また、本参考例によれば、従来の基板処理装置の課題であったトップリングの押圧力の応答性の遅れを改善することができる。すなわち、従来の基板処理装置では、トップリングヘッドの外部に圧力調整部が設けられていたため、圧力調整部とトップリングとの間の距離が長く、基板に対する押圧力の変化指令に対して、実際の押圧力変化が遅延するという問題があった。本参考例によれば、圧力調整部をトップリングヘッドに設置したので、従来の構成に比べて、トップリングと圧力調整部との距離が短くなる。したがって、流体の圧力の応答性が向上し、基板の表面の凹凸に応じて速やかに押圧力を変化させることができる。その結果、基板に対するトップリングの押圧力をより適切かつ的確に制御することができる。 Further, according to this reference example , it is possible to improve the delay in the response of the pressing force of the top ring, which is a problem of the conventional substrate processing apparatus. That is, in the conventional substrate processing apparatus, since the pressure adjusting unit is provided outside the top ring head, the distance between the pressure adjusting unit and the top ring is long, and in response to a change command of the pressing force on the substrate, There was a problem that the change in pressing force was delayed. According to this reference example , since the pressure adjustment unit is installed in the top ring head, the distance between the top ring and the pressure adjustment unit is shorter than that in the conventional configuration. Therefore, the responsiveness of the fluid pressure is improved, and the pressing force can be quickly changed according to the unevenness of the surface of the substrate. As a result, the pressing force of the top ring against the substrate can be controlled more appropriately and accurately.
本参考例の好ましい態様は、前記トップリングを前記支持軸を中心に揺動させる揺動機構を前記トップリングヘッドに設置したことを特徴とする。
本参考例の好ましい態様は、前記トップリングヘッドは、前記支持軸に着脱可能に取り付けられていることを特徴とする。このように構成すれば、メンテナンスを簡易とするとともに、基板処理プロセス全体を停止させることなく、個別のトップリングヘッドのメンテナンスを実行することができる。
In a preferred aspect of the present reference example , a swing mechanism that swings the top ring about the support shaft is installed in the top ring head.
In a preferred aspect of the present reference example, the top ring head is detachably attached to the support shaft. If comprised in this way, while maintaining maintenance, the maintenance of an individual top ring head can be performed, without stopping the whole substrate processing process.
上記構成によれば、アクセスが容易なトップリングヘッド自体に圧力調整部や揺動機構が設けられているので、これら圧力調整部や揺動機構のメンテナンス時に、隣接する他の機器ユニットを取り外す必要がない。さらに、トップリング、トップリングヘッド、圧力調整部、揺動機構などを1つのモジュール(ユニット)として構成することができるので、揺動機構を構成するベアリング、モータ、減速機などの交換をモジュール単位で行うことができる。その結果、装置ダウンタイム(すなわち、メンテナンス対象となる機器を停止させている時間)が短縮できる。高スループット型基板処理装置においては、装置のダウンタイムの短縮は、基板処理のコストの低減につながる。このように、本参考例においては、運転そのものはできるだけ継続させながらコンポーネントとしての各機器のメンテナンスを行うことができるので、たとえば、装置の使用年数が長期となってメンテナンス頻度が多くなってきたとしても、基板処理は継続可能であり、また、交換補修作業も容易となるので、使用耐用年数を大幅に向上させた基板処理装置を提供することができる。 According to the above configuration, since the top ring head itself that is easy to access is provided with the pressure adjusting unit and the swinging mechanism, it is necessary to remove other adjacent equipment units during maintenance of the pressure adjusting unit and the swinging mechanism. There is no. In addition, the top ring, top ring head, pressure adjustment unit, swing mechanism, etc. can be configured as one module (unit), so replacement of bearings, motors, reducers, etc. that make up the swing mechanism is a module unit. Can be done. As a result, the apparatus downtime (that is, the time during which the device to be maintained is stopped) can be shortened. In a high-throughput substrate processing apparatus, shortening the downtime of the apparatus leads to a reduction in substrate processing costs. In this way, in this reference example, it is possible to perform maintenance of each device as a component while continuing the operation itself as much as possible. However, since the substrate processing can be continued and the replacement repair work is facilitated, it is possible to provide a substrate processing apparatus having a significantly improved service life.
本発明の他の参考例は、基板を研磨する複数の研磨ユニットを有する研磨部と、前記複数の研磨ユニット間で基板を搬送する搬送機構と、研磨された基板を洗浄し乾燥する洗浄部とを備えた基板処理装置であって、前記搬送機構は、高さの異なる2つの走行軸上に配置された複数の基板搬送ステージと、前記複数の基板搬送ステージを前記2つの走行軸に沿って水平方向に移動させる複数の水平駆動機構と、前記複数の基板搬送ステージをそれぞれ独立に上下方向に移動させる複数の昇降駆動機構とを有することを特徴とする基板処理装置である。 Another reference example of the present invention includes a polishing unit having a plurality of polishing units for polishing a substrate, a transport mechanism for transporting the substrate between the plurality of polishing units, a cleaning unit for cleaning and drying the polished substrate, The substrate processing apparatus includes: a plurality of substrate transfer stages disposed on two travel axes having different heights; and the plurality of substrate transport stages along the two travel axes. A substrate processing apparatus comprising: a plurality of horizontal drive mechanisms that move in the horizontal direction; and a plurality of lift drive mechanisms that move the plurality of substrate transfer stages independently in the vertical direction.
上記構成によれば、基板の水平方向への搬送と上下方向への搬送とを同時に行うことができるので、基板の搬送に要する時間を短縮することができる。また、従来必要であったプッシャーを省略することができるので、構造をシンプルにすることができ、かつ搬送機構のメンテナンスを容易に行うことができる。その結果、基板処理装置のダウンタイムを短縮させることができる。したがって、メンテナンス性を大幅に向上させ、また、スループットを高めた基板処理装置を提供することができる。 According to the above configuration, since the substrate can be transported in the horizontal direction and the top-bottom direction at the same time, the time required for transporting the substrate can be shortened. In addition, since the pusher that has been conventionally required can be omitted, the structure can be simplified and the maintenance of the transport mechanism can be easily performed. As a result, the downtime of the substrate processing apparatus can be shortened. Therefore, it is possible to provide a substrate processing apparatus that greatly improves maintainability and increases throughput.
本参考例の好ましい態様は、前記2つの走行軸とは異なる高さの走行軸上に配置された基板パスステージと、前記基板パスステージを前記走行軸に沿って水平方向に移動させる水平駆動機構とをさらに備えたことを特徴とする。このような構成によれば、複数の基板が同時に異なる高さで水平方向に移動することができ、これによりスループットを向上させることができる。 A preferred embodiment of the present reference example includes a substrate path stage disposed on a traveling axis having a height different from that of the two traveling axes, and a horizontal drive mechanism that moves the substrate path stage in a horizontal direction along the traveling axis. And further comprising. According to such a configuration, a plurality of substrates can move in the horizontal direction at different heights at the same time, thereby improving the throughput.
本発明のさらに他の参考例は、基板を保持する上下動可能なトップリングを有する研磨部と、前記トップリングと基板の受け渡しを行う上下動可能な搬送ステージを有する搬送機構と、前記トップリングと前記搬送ステージとの間に配置されたリテーナリングステーションとを備え、前記トップリングは、トップリング本体と、該トップリング本体に対して相対的に上下動可能なリテーナリングとを有し、前記リテーナリングステーションは、前記リテーナリングを押し上げる複数の押し上げ機構を有していることを特徴とする基板処理装置である。 Still another reference example of the present invention includes a polishing unit having a vertically movable top ring for holding a substrate, a transport mechanism having a vertically movable transport stage for transferring the top ring and the substrate, and the top ring. And a retainer ring station disposed between the transfer stage and the top ring, the top ring having a top ring body and a retainer ring movable up and down relative to the top ring body, The retainer ring station is a substrate processing apparatus having a plurality of push-up mechanisms for pushing up the retainer ring.
上記構成によれば、トップリングおよび搬送ステージとは別に設けられたリテーナリングステーションによりトップリングのリテーナリングが押し上げられるので、ウェハの受け渡しの際に、トップリングと搬送ステージは、互いを待つことなく、ほぼ同時に互いに近接し、ほぼ同時に離間することができる。したがって、トップリングと搬送ステージとの間での基板の受け渡し時間が短縮される。また、基板のトップリングからのリリース動作がリテーナリングによって阻害されることがなく、基板を確実にトップリングからリリースすることができる。さらに、複数の研磨ユニットが設けられる場合には、トップリングから基板を確実に離脱させて搬送ステージに移動させる受渡時間を確実に制御できるので、搬送ステージとトップリングとの間の基板の受け渡し時間を平準化することができる。その結果、基板処理全体のスループットを向上させることができる。 According to the above configuration, since the retainer ring of the top ring is pushed up by the retainer ring station provided separately from the top ring and the transfer stage, the top ring and the transfer stage do not wait for each other when delivering the wafer. , Close to each other at approximately the same time, and spaced apart at approximately the same time. Accordingly, the substrate transfer time between the top ring and the transfer stage is shortened. In addition, the release operation of the substrate from the top ring is not hindered by the retainer ring, and the substrate can be reliably released from the top ring. Furthermore, when a plurality of polishing units are provided, the delivery time for reliably removing the substrate from the top ring and moving it to the transfer stage can be controlled reliably, so the transfer time of the substrate between the transfer stage and the top ring Can be leveled. As a result, the throughput of the entire substrate processing can be improved.
本参考例の好ましい態様は、前記押し上げ機構は、前記リテーナリングに接触する押し上げピンと、該押し上げピンを上方に押すばねとを含むことを特徴とする。
本参考例の好ましい態様は、前記リテーナリングステーションは、前記押し上げ機構が前記リテーナリングを押し上げている間に前記リテーナリングの摩耗量を測定する摩耗測定器を有することを特徴とする。
本参考例の好ましい態様は、前記摩耗測定器は、前記リテーナリングの下面に接触する接触部材と、前記接触部材を上方に押すばねと、前記接触部材を上下方向に移動可能に支持する直動ガイドと、前記接触部材の変位を測定する変位測定器とを備えることを特徴とする。このような構成によれば、基板処理装置全体のスループットを低下させることなく、リテーナリングの摩耗を測定することができる。
In a preferred aspect of the present reference example, the push-up mechanism includes a push-up pin that contacts the retainer ring and a spring that pushes the push-up pin upward.
In a preferred aspect of the present reference example, the retainer ring station includes a wear measuring device that measures a wear amount of the retainer ring while the push-up mechanism pushes up the retainer ring.
In a preferred aspect of this reference example, the wear measuring instrument is a linear motion that supports the contact member that contacts the lower surface of the retainer ring, a spring that pushes the contact member upward, and the contact member that is movable in the vertical direction. A guide and a displacement measuring device for measuring the displacement of the contact member are provided. According to such a configuration, the wear of the retainer ring can be measured without reducing the throughput of the entire substrate processing apparatus.
本発明のさらに他の参考例は、トップリングを基板の搬送位置に移動させ、搬送ステージにより基板を前記搬送位置に搬送し、前記トップリングを下降させて該トップリングのリテーナリングを押し上げ機構に接触させることにより前記リテーナリングを前記押し上げ機構により押し上げ、前記トップリングを下降させながら、前記搬送ステージを上昇させ、前記搬送ステージから前記トップリングに基板を渡し、基板を前記搬送位置から研磨位置に移動させ、そして基板を研磨することを特徴とする基板処理方法である。
本参考例によれば、ウェハの受け渡しの際に、トップリングと搬送ステージは、互いを待つことなく、ほぼ同時に互いに近接し、ほぼ同時に離間することができる。したがって、トップリングと搬送ステージとの間での基板の受け渡し時間が短縮される。また、基板のトップリングからのリリース動作がリテーナリングによって阻害されることがなく、基板を確実にトップリングからリリースすることができる。さらに、複数の研磨ユニットが設けられる場合には、トップリングから基板を確実に離脱させて搬送ステージに移動させる受渡時間を確実に制御できるので、搬送ステージとトップリングとの間の基板の受け渡し時間を平準化することができる。その結果、基板処理全体のスループットを向上させることができる。
According to still another embodiment of the present invention, the top ring is moved to the substrate transfer position, the substrate is transferred to the transfer position by the transfer stage, the top ring is lowered, and the retainer ring of the top ring is pushed up. The retainer ring is lifted by the push-up mechanism by bringing it into contact, the transport stage is lifted while lowering the top ring, the substrate is transferred from the transport stage to the top ring, and the substrate is moved from the transport position to the polishing position. A substrate processing method characterized by moving and polishing a substrate.
According to this reference example , when delivering the wafer, the top ring and the transfer stage can approach each other at the same time and can be separated from each other at the same time without waiting for each other. Accordingly, the substrate transfer time between the top ring and the transfer stage is shortened. Further, the release operation of the substrate from the top ring is not hindered by the retainer ring, and the substrate can be reliably released from the top ring. Furthermore, when a plurality of polishing units are provided, the delivery time for reliably removing the substrate from the top ring and moving it to the transfer stage can be controlled reliably, so the transfer time of the substrate between the transfer stage and the top ring Can be leveled. As a result, the throughput of the entire substrate processing can be improved.
本発明によれば、基板処理におけるスループットを向上させることができる。また、本発明によれば、メンテナンス容易な基板処理装置が実現され、またそのために必要な構成ユニットを提供することができる。 According to the present invention, throughput in substrate processing can be improved. In addition, according to the present invention, a substrate processing apparatus that can be easily maintained is realized, and a constituent unit necessary for that purpose can be provided.
以下、本発明に係る基板処理装置の実施形態について図面を参照して詳細に説明する。同一または相当する構成要素には、同一の符号を付して重複した説明を省略する。
図1は本発明の一実施形態に係る基板処理装置の全体構成を示す平面図である。図1に示すように、この基板処理装置は、略矩形状のハウジング1を備えており、ハウジング1の内部は隔壁1a,1bによってロード/アンロード部2と研磨部3と洗浄部4とに区画されている。これらのロード/アンロード部2、研磨部3、および洗浄部4は、それぞれ独立に組み立てられ、独立に排気される。また、基板処理装置は、基板処理動作を制御する制御部5を有している。
Embodiments of a substrate processing apparatus according to the present invention will be described below in detail with reference to the drawings. The same or corresponding components are denoted by the same reference numerals, and redundant description is omitted.
FIG. 1 is a plan view showing the overall configuration of a substrate processing apparatus according to an embodiment of the present invention. As shown in FIG. 1, the substrate processing apparatus includes a substantially rectangular housing 1, and the interior of the housing 1 is divided into a load / unload
ロード/アンロード部2は、多数のウェハ(基板)をストックするウェハカセットが載置される2つ以上(本実施形態では4つ)のフロントロード部20を備えている。これらのフロントロード部20はハウジング1に隣接して配置され、基板処理装置の幅方向(長手方向と垂直な方向)に沿って配列されている。フロントロード部20には、オープンカセット、SMIF(Standard Manufacturing Interface)ポッド、またはFOUP(Front Opening Unified Pod)を搭載することができるようになっている。ここで、SMIF、FOUPは、内部にウェハカセットを収納し、隔壁で覆うことにより、外部空間とは独立した環境を保つことができる密閉容器である。
The load / unload
また、ロード/アンロード部2には、フロントロード部20の並びに沿って走行機構21が敷設されており、この走行機構21上にウェハカセットの配列方向に沿って移動可能な2台の搬送ロボット(ローダー)22が設置されている。搬送ロボット22は走行機構21上を移動することによってフロントロード部20に搭載されたウェハカセットにアクセスできるようになっている。各搬送ロボット22は上下に2つのハンドを備えており、上側のハンドを処理されたウェハをウェハカセットに戻すときに使用し、下側のハンドを処理前のウェハをウェハカセットから取り出すときに使用して、上下のハンドを使い分けることができるようになっている。さらに、搬送ロボット22の下側のハンドは、その軸心周りに回転することで、ウェハを反転させることができるように構成されている。
In addition, a traveling
ロード/アンロード部2は最もクリーンな状態を保つ必要がある領域であるため、ロード/アンロード部2の内部は、基板処理装置外部、研磨部3、および洗浄部4のいずれよりも高い圧力に常時維持されている。研磨部3は研磨液としてスラリーを用いるため最もダーティな領域である。したがって、研磨部3の内部には負圧が形成され、その圧力は洗浄部4の内部圧力よりも低く維持されている。ロード/アンロード部2には、HEPAフィルタ、ULPAフィルタ、またはケミカルフィルタなどのクリーンエアフィルタを有するフィルタファンユニット(図示せず)が設けられており、このフィルタファンユニットからはパーティクルや有毒蒸気、有毒ガスが除去されたクリーンエアが常時吹き出している。
Since the load / unload
研磨部3は、ウェハの研磨(平坦化)が行われる領域であり、第1研磨ユニット3A、第2研磨ユニット3B、第3研磨ユニット3C、第4研磨ユニット3Dを備えている。これらの第1研磨ユニット3A、第2研磨ユニット3B、第3研磨ユニット3C、および第4研磨ユニット3Dは、図1に示すように、基板処理装置の長手方向に沿って配列されている。
The polishing unit 3 is a region where the wafer is polished (flattened), and includes a
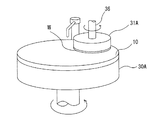
図1に示すように、第1研磨ユニット3Aは、研磨面を有する研磨パッド10が取り付けられた研磨テーブル30Aと、ウェハを保持しかつウェハを研磨テーブル30A上の研磨パッド10に押圧しながら研磨するためのトップリング31Aと、研磨パッド10に研磨液やドレッシング液(例えば、純水)を供給するための研磨液供給ノズル32Aと、研磨パッド10の研磨面のドレッシングを行うためのドレッサ33Aと、液体(例えば純水)と気体(例えば窒素ガス)の混合流体または液体(例えば純水)を霧状にして研磨面に噴射するアトマイザ34Aとを備えている。
As shown in FIG. 1, the
同様に、第2研磨ユニット3Bは、研磨パッド10が取り付けられた研磨テーブル30Bと、トップリング31Bと、研磨液供給ノズル32Bと、ドレッサ33Bと、アトマイザ34Bとを備えており、第3研磨ユニット3Cは、研磨パッド10が取り付けられた研磨テーブル30Cと、トップリング31Cと、研磨液供給ノズル32Cと、ドレッサ33Cと、アトマイザ34Cとを備えており、第4研磨ユニット3Dは、研磨パッド10が取り付けられた研磨テーブル30Dと、トップリング31Dと、研磨液供給ノズル32Dと、ドレッサ33Dと、アトマイザ34Dとを備えている。
Similarly, the
第1研磨ユニット3A、第2研磨ユニット3B、第3研磨ユニット3C、および第4研磨ユニット3Dは、互いに同一の構成を有しているので、以下、第1研磨ユニット31Aについて説明する。
図2は、第1研磨ユニット3Aを模式的に示す斜視図である。トップリング31Aは、トップリングシャフト36に支持されている。研磨テーブル30Aの上面には研磨パッド10が貼付されており、この研磨パッド10の上面はウェハWを研磨する研磨面を構成する。なお、研磨パッド10に代えて固定砥粒を用いることもできる。トップリング31Aおよび研磨テーブル30Aは、矢印で示すように、その軸心周りに回転するように構成されている。ウェハWは、トップリング31Aの下面に真空吸着により保持される。研磨時には、研磨液供給ノズル32Aから研磨パッド10の研磨面に研磨液が供給され、研磨対象であるウェハWがトップリング31Aにより研磨面に押圧されて研磨される。
Since the
FIG. 2 is a perspective view schematically showing the
図3はトップリング31Aの構造を模式的に示す断面図である。トップリング31Aは、トップリングシャフト36の下端に自在継手37を介して連結されている。自在継手37は、トップリング31Aとトップリングシャフト36との互いの傾動を許容しつつ、トップリングシャフト36の回転をトップリング31Aに伝達するボールジョイントである。トップリング31Aは、略円盤状のトップリング本体38と、トップリング本体38の下部に配置されたリテーナリング40とを備えている。トップリング本体38は金属やセラミックス等の強度および剛性が高い材料から形成されている。また、リテーナリング40は、剛性の高い樹脂材またはセラミックス等から形成されている。なお、リテーナリング40をトップリング本体38と一体的に形成することとしてもよい。
FIG. 3 is a cross-sectional view schematically showing the structure of the
トップリング本体38およびリテーナリング40の内側に形成された空間内には、ウェハWに当接する円形の弾性パッド42と、弾性膜からなる環状の加圧シート43と、弾性パッド42を保持する概略円盤状のチャッキングプレート44とが収容されている。弾性パッド42の上周端部はチャッキングプレート44に保持され、弾性パッド42とチャッキングプレート44との間には、4つの圧力室(エアバッグ)P1,P2,P3,P4が設けられている。圧力室P1,P2,P3,P4は弾性パッド42とチャッキングプレート44とによって形成されている。圧力室P1,P2,P3,P4にはそれぞれ流体路51,52,53,54を介して加圧空気等の加圧流体が供給され、あるいは真空引きがされるようになっている。中央の圧力室P1は円形であり、他の圧力室P2,P3,P4は環状である。これらの圧力室P1,P2,P3,P4は、同心上に配列されている。
In a space formed inside the
圧力室P1,P2,P3,P4の内部圧力は後述する圧力調整部により互いに独立して変化させることが可能であり、これにより、ウェハWの4つの領域、すなわち、中央部、内側中間部、外側中間部、および周縁部に対する押圧力を独立に調整することができる。また、トップリング31Aの全体を昇降させることにより、リテーナリング40を所定の押圧力で研磨パッド10に押圧できるようになっている。チャッキングプレート44とトップリング本体38との間には圧力室P5が形成され、この圧力室P5には流体路55を介して加圧流体が供給され、あるいは真空引きがされるようになっている。これにより、チャッキングプレート44および弾性パッド42全体が上下方向に動くことができる。
The internal pressures of the pressure chambers P1, P2, P3, and P4 can be changed independently from each other by a pressure adjusting unit, which will be described later. Thereby, four regions of the wafer W, that is, a central portion, an inner intermediate portion, The pressing force against the outer intermediate portion and the peripheral portion can be adjusted independently. Further, by raising and lowering the entire
ウェハWの周端部はリテーナリング40に囲まれており、研磨中にウェハWがトップリング31Aから飛び出さないようになっている。圧力室P3を構成する、弾性パッド42の部位には開口(図示せず)が形成されており、圧力室P3に真空を形成することによりウェハWがトップリング31Aに吸着保持されるようになっている。また、この圧力室P3に窒素ガス、乾燥空気、圧縮空気等を供給することにより、ウェハWがトップリング31Aからリリースされるようになっている。
The peripheral edge of the wafer W is surrounded by the
図4はトップリング31Aの他の構造例を模式的に示す断面図である。この例では、チャッキングプレートは設けられていなく、弾性パッド42はトップリング本体38の下面に取り付けられている。また、チャッキングプレートとトップリング本体38との間の圧力室P5も設けられていない。これに代えて、リテーナリング40とトップリング本体38との間には弾性バッグ46が配置されており、その弾性バッグ46の内部には圧力室P6が形成されている。リテーナリング40はトップリング本体38に対して相対的に上下動可能となっている。圧力室P6には流体路56が連通しており、加圧空気等の加圧流体が流体路56を通じて圧力室P6に供給されるようになっている。圧力室P6の内部圧力は後述する圧力調整部により調整可能となっている。したがって、ウェハWに対する押圧力とは独立してリテーナリング40の研磨パッド10に対する押圧力を調整することができる。他の構成および動作は、図3に示すトップリングの構成と同一である。本実施形態では、図3または図4のいずれのタイプのトップリングを用いることができる。
FIG. 4 is a cross-sectional view schematically showing another structural example of the
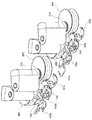
図5はトップリング31Aを回転および揺動させる機構を説明するための断面図である。トップリングシャフト(例えば、スプラインシャフト)36はトップリングヘッド60に回転自在に支持されている。また、トップリングシャフト36は、プーリ61,62およびベルト63を介してモータM1の回転軸に連結されており、モータM1によってトップリングシャフト36およびトップリング31Aがその軸心周りに回転する。このモータM1はトップリングヘッド60の上部に取り付けられている。また、トップリングヘッド60とトップリングシャフト36とは、上下駆動源としてのエアシリンダ65によって連結されている。このエアシリンダ65に供給されるエア(圧縮気体)によりトップリングシャフト36およびトップリング31Aが一体に上下動する。なお、エアシリンダ65に代えて、ボールねじおよびサーボモータを有する機構を上下駆動源として用いてもよい。
FIG. 5 is a cross-sectional view for explaining a mechanism for rotating and swinging the
トップリングヘッド60は、支持軸67に軸受72を介して回転自在に支持されている。この支持軸67は固定軸であり、回転しない構造となっている。トップリングヘッド60にはモータM2が設置されており、トップリングヘッド60とモータM2との相対位置は固定である。このモータM2の回転軸は、図示しない回転伝達機構(歯車など)を介して支持軸67に連結されており、モータM2を回転させることによって、トップリングヘッド60が支持軸67を中心として揺動(スイング)するようになっている。したがって、トップリングヘッド60の揺動運動により、その先端に支持されたトップリング31Aは研磨テーブル30Aの上方の研磨位置と研磨テーブル30Aの側方の搬送位置との間を移動する。なお、本実施形態では、トップリング31Aを揺動させる揺動機構はモータM2から構成される。
The
トップリングシャフト36の内部には、その長手方向に延びる貫通孔(図示せず)が形成されている。上述したトップリング31Aの流体路51,52,53,54,55,56は、この貫通孔を通って、トップリングシャフト36の上端に設けられている回転継手69に接続されている。この回転継手69を介してトップリング31Aに加圧気体(クリーンエア)や窒素ガスなどの流体が供給され、またトップリング31Aから気体が真空排気される。回転継手69には、上記流体通路51,52,53,54,55,56(図3および図4参照)に連通する複数の流体管70が接続され、これら流体管70は圧力調整部75に接続されている。また、エアシリンダ65に加圧空気を供給する流体管71も圧力調整部75に接続されている。
A through hole (not shown) extending in the longitudinal direction is formed in the
圧力調整部75は、トップリング31Aに供給される流体の圧力を調整する電空レギュレータや、流体管70,71に接続される配管、これら配管に設けられたエアオペレートバルブ、これらのエアオペレートバルブの作動源となるエアの圧力を調整する電空レギュレータ、トップリング31Aに真空を形成するエジェクタなどを有しており、これらが集合して1つのブロック(ユニット)を構成している。圧力調整部75は、トップリングヘッド60の上部に固定されている。トップリング31Aの圧力室P1,P2,P3,P4,P5(図3参照)に供給される加圧気体や、エアシリンダ65に供給される加圧空気の圧力は、この圧力調整部75の電空レギュレータによって調整される。同様に、圧力調整部75のエジェクタによってトップリング31AのエアバッグP1,P2,P3,P4内や、チャッキングプレート44とトップリング本体38の間の圧力室P5内に真空が形成される。
The
このように、圧力調整機器である電空レギュレータやバルブがトップリング31Aの近くに設置されているので、トップリング31A内の圧力の制御性が向上される。より具体的には、電空レギュレータと圧力室P1,P2,P3,P4,P5との距離が短いので、制御部5からの圧力変更指令に対する応答性が向上する。同様に、真空源であるエジェクタもトップリング31Aの近くに設置されているので、トップリング31A内に真空を形成するときの応答性が向上する。また、圧力調整部75の裏面を、電装機器の取り付け用台座として利用することができ、従来必要であった取付用のフレームを不要とすることができる。
As described above, since the electropneumatic regulator and the valve, which are pressure adjusting devices, are installed near the
トップリングヘッド60、トップリング31A、圧力調整部75、トップリングシャフト36、モータM1、モータM2、エアシリンダ65は、1つのモジュール(以下、トップリングアッセンブリという)として構成されている。すなわち、トップリングシャフト36、モータM1、モータM2、圧力調整部75、エアシリンダ65は、トップリングヘッド60に取り付けられている。トップリングヘッド60は、支持軸67から取り外しできるように構成されている。したがって、トップリングヘッド60と支持軸67とを分離することにより、トップリングアッセンブリを基板処理装置から取り外すことができる。このような構成によれば、支持軸67やトップリングヘッド60などのメンテナンス性を向上させることができる。例えば、軸受72から異音が発生したときに、軸受72を容易に交換することができ、また、モータM2や回転伝達機構(減速機)を交換する際に、隣接する機器を取り外す必要もない。
The
図6は、研磨テーブル30Aの内部構造を模式的に示す断面図である。図6に示すように、研磨テーブル30Aの内部には、ウェハWの膜の状態を検知するセンサ76が埋設されている。この例では、センサ76として渦電流センサが用いられている。センサ76の信号は制御部5に送信され、制御部5によって膜厚を表すモニタリング信号が生成されるようになっている。このモニタリング信号(およびセンサ信号)の値は膜厚自体を示すものではないが、モニタリング信号の値は膜厚に応じて変化する。したがって、モニタリング信号はウェハWの膜厚を示す信号ということができる。
FIG. 6 is a cross-sectional view schematically showing the internal structure of the polishing table 30A. As shown in FIG. 6, a
制御部5は、モニタリング信号に基づいて各圧力室P1,P2,P3,P4の内部圧力を決定し、決定された内部圧力が各圧力室P1,P2,P3,P4に形成されるように圧力調整部75に指令を出すようになっている。制御部5は、モニタリング信号に基づいて各圧力室P1,P2,P3,P4の内部圧力を操作する圧力制御部として、および研磨終点を検知する終点検知部として機能する。
The
センサ76は、第1研磨ユニット3Aと同様に、第2研磨ユニット3B、第3研磨ユニット3C、および第4研磨ユニット3Dの研磨テーブルにも設けられている。制御部5は、各研磨ユニット3A〜3Dのセンサ76から送られてくる信号からモニタリング信号を生成し、各研磨ユニット3A〜3Dでのウェハの研磨の進捗を監視する。複数のウェハが研磨ユニット3A〜3Dで研磨されている場合、制御部5は、ウェハの膜厚を示すモニタリング信号を研磨中に監視し、それらのモニタリング信号に基づいて、研磨ユニット3A〜3Dでの研磨時間がほぼ同一となるようにトップリング31A〜31Dの押圧力を制御する。このように研磨中のトップリング31A〜31Dの押圧力をモニタリング信号に基づいて調整することで、研磨ユニット3A〜3Dでの研磨時間を平準化することができる。
Similar to the
ウェハWは、第1研磨ユニット3A、第2研磨ユニット3B、第3研磨ユニット3C、第4研磨ユニット3Dのいずれかで研磨されてもよく、またはこれらの研磨ユニット3A〜3Dから予め選択された複数の研磨ユニットで連続的に研磨されてもよい。例えば、ウェハWを第1研磨ユニット3A→第2研磨ユニット3Bの順で研磨してもよく、またはウェハWを第3研磨ユニット3C→第4研磨ユニット3Dの順で研磨してもよい。さらに、ウェハWを第1研磨ユニット3A→第2研磨ユニット3B→第3研磨ユニット3C→第4研磨ユニット3Dの順で研磨してもよい。いずれの場合でも、研磨ユニット3A〜3Dのすべての研磨時間を平準化することで、スループットを向上させることができる。
The wafer W may be polished by any one of the
渦電流センサは、ウェハの膜が金属膜である場合に好適に用いられる。ウェハの膜が酸化膜などの光透過性を有する膜である場合には、センサ76として光学式センサを用いることができる。あるいは、センサ76としてマイクロ波センサを用いてもよい。マイクロ波センサは、金属膜および非金属膜のいずれの場合にも用いることができる。以下、光学式センサおよびマイクロ波センサの一例について説明する。
The eddy current sensor is preferably used when the wafer film is a metal film. When the wafer film is a light-transmitting film such as an oxide film, an optical sensor can be used as the
図7は、光学式センサを備えた研磨テーブルを示す模式図である。図7に示すように、研磨テーブル30Aの内部に、ウェハWの膜の状態を検知する光学式センサ76が埋設されている。このセンサ76は、ウェハWに光を照射し、ウェハWからの反射光の強度(反射強度または反射率)からウェハWの膜の状態(膜厚など)を検知する。
FIG. 7 is a schematic diagram showing a polishing table provided with an optical sensor. As shown in FIG. 7, an
また、研磨パッド10には、センサ76からの光を透過させるための透光部77が取付けられている。この透光部77は、透過率の高い材質で形成されており、例えば、無発泡ポリウレタンなどにより形成される。あるいは、研磨パッド10に貫通孔を設け、この貫通孔がウェハWに塞がれる間下方から透明液を流すことにより、透光部77を構成してもよい。透光部77は、トップリング31Aに保持されたウェハWの中心を通過する位置に配置される。
The
センサ76は、図7に示すように、光源78aと、光源78aからの光をウェハWの被研磨面に照射する発光部としての発光光ファイバ78bと、被研磨面からの反射光を受光する受光部としての受光光ファイバ78cと、受光光ファイバ78cにより受光された光を分光する分光器およびこの分光器により分光された光を電気的情報として蓄積する複数の受光素子とを内部に有する分光器ユニット78dと、光源78aの点灯および消灯や分光器ユニット78d内の受光素子の読取開始のタイミングなどの制御を行う動作制御部78eと、動作制御部78eに電力を供給する電源78fとを備えている。なお、光源78aおよび分光器ユニット78dには、動作制御部78eを介して電力が供給される。
As shown in FIG. 7, the
発光光ファイバ78bの発光端と受光光ファイバ78cの受光端は、ウェハWの被研磨面に対して略垂直になるように構成されている。分光器ユニット78d内の受光素子としては、例えば128素子のフォトダイオードアレイを用いることができる。分光器ユニット78dは、動作制御部78eに接続されている。分光器ユニット78d内の受光素子からの情報は、動作制御部78eに送られ、この情報に基づいて反射光のスペクトルデータが生成される。すなわち、動作制御部78eは、受光素子に蓄積された電気的情報を読み取って反射光のスペクトルデータを生成する。このスペクトルデータは、波長に従って分解された反射光の強度を示し、膜厚によって変化する。
The light emitting end of the light emitting
動作制御部78eは、上述した制御部5に接続されている。このようにして、動作制御部78eで生成されたスペクトルデータは、制御部5に送信される。制御部5では、動作制御部78eから受信したスペクトルデータに基づいて、ウェハWの膜厚に関連付けられた特性値を算出して、これをモニタリング信号として使用する。
The
図8は、マイクロ波センサを備えた研磨テーブルを示す模式図である。センサ76は、マイクロ波をウェハWの被研磨面に向けて照射するアンテナ80aと、アンテナ80aにマイクロ波を供給するセンサ本体80bと、アンテナ80aとセンサ本体80bとを接続する導波管81とを備えている。アンテナ80aは研磨テーブル30Aに埋設されており、トップリング31Aに保持されたウェハWの中心位置に対向するように配置されている。
FIG. 8 is a schematic view showing a polishing table provided with a microwave sensor. The
センサ本体80bは、マイクロ波を生成してアンテナ80aにマイクロ波を供給するマイクロ波源80cと、マイクロ波源80cにより生成されたマイクロ波(入射波)とウェハWの表面から反射したマイクロ波(反射波)とを分離させる分離器80dと、分離器80dにより分離された反射波を受信して反射波の振幅および位相を検出する検出部80eとを備えている。なお、分離器80dとしては、方向性結合器が好適に用いられる。
The
アンテナ80aは導波管81を介して分離器80dに接続されている。マイクロ波源80cは分離器80dに接続され、マイクロ波源80cにより生成されたマイクロ波は、分離器80dおよび導波管81を介してアンテナ80aに供給される。マイクロ波はアンテナ80aからウェハWに向けて照射され、研磨パッド10を透過(貫通)してウェハWに到達する。ウェハWからの反射波は再び研磨パッド10を透過した後、アンテナ80aにより受信される。
The
反射波はアンテナ80aから導波管81を介して分離器80dに送られ、分離器80dによって入射波と反射波とが分離される。分離器80dにより分離された反射波は検出部80eに送信される。検出部80eでは反射波の振幅および位相が検出される。反射波の振幅は電力(dbmまたはW)または電圧(V)として検出され、反射波の位相は検出部80eに内蔵された位相計測器(図示せず)により検出される。検出部80eによって検出された反射波の振幅および位相は制御部5に送られ、ここで反射波の振幅および位相に基づいてウェハWの金属膜や非金属膜などの膜厚が解析される。解析された値は、モニタリング信号として制御部5により監視される。
The reflected wave is sent from the
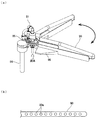
図9は、本発明の一実施例として用いうるドレッサ33Aを示す斜視図である。図9に示すように、ドレッサ33Aは、ドレッサアーム85と、ドレッサアーム85の先端に回転自在に取り付けられたドレッシング部材86と、ドレッサアーム85の他端に連結される揺動軸88と、揺動軸88を中心にドレッサアーム85を揺動(スイング)させる駆動機構としてのモータ89とを備えている。ドレッシング部材86は円形のドレッシング面を有しており、ドレッシング面には硬質な粒子が固定されている。この硬質な粒子としては、ダイヤモンド粒子やセラミック粒子などが挙げられる。ドレッサアーム85内には、図示しないモータが内蔵されており、このモータによってドレッシング部材86が回転するようになっている。揺動軸88は図示しない昇降機構に連結されており、この昇降機構によりドレッサアーム85が下降することでドレッシング部材86が研磨パッド10の研磨面を押圧するようになっている。
FIG. 9 is a perspective view showing a
図10は、ドレッサ33Aが研磨パッド10の研磨面をドレッシングしているときの移動軌跡を示す平面図である。図10に示すように、ドレッサアーム85は研磨パッド10の半径よりも長く、揺動軸88は、研磨パッド10の径方向外側に位置している。研磨パッド10の研磨面をドレッシングするときは、研磨パッド10を回転させるとともに、モータによりドレッシング部材86を回転させ、次いで昇降機構によりドレッサアーム85を下降させ、ドレッシング部材86を回転する研磨パッド10の研磨面に摺接させる。その状態で、モータ89によりドレッサアーム85を揺動(スイング)させる。研磨パッド10のドレッシング中は、研磨液供給ノズル32Aからドレッシング液としての純水が研磨パッド10の研磨面に供給される。ドレッサアーム85の揺動により、その先端に位置するドレッシング部材86は、図10に示すように、研磨パッド10の研磨面の端から端まで研磨面の中心部を経由して横切るように移動することができる。この揺動動作により、ドレッシング部材86は研磨パッド10の研磨面をその中心を含む全体に亘ってドレッシングすることができ、研磨面へのドレス効果を飛躍的に高めることができる。したがって、研磨面全体を均一にドレッシングすることができ、平坦な研磨面を得ることができる。
FIG. 10 is a plan view showing a movement locus when the
なお、ドレッシング終了後は、ドレッサアーム85は、図10に示すように、研磨テーブル30Aの側方の待機位置A1に移動する。ドレッサ33Aのメンテナンス時には、ドレッサアーム85は、待機位置A1と略反対側のメンテナンス位置A4に移動する。なお、図10に示すように、ドレッシングをしている間、研磨面の端部にある位置A2と、研磨面の中心にある位置A3との間で、ドレッサアーム85を揺動させてもよい。このような動作によれば、ドレッシング動作を迅速に行うことができ、かつドレッシング動作を確実に終了させることができる。
After the dressing is completed, the
上述の例では、揺動軸88に連結された昇降機構により、ドレッサアーム85およびドレッシング部材86を一体に上下動させているが、昇降機構をドレッサアーム85に内蔵し、この昇降機構によりドレッシング部材86を上下動させてもよい。さらに、他の変形例では、揺動軸88を上下動させる第1の昇降機構を設けるとともに、ドレッシング部材86を上下動させる第2の昇降機構をドレッサアーム85に内蔵することもできる。この場合、第1の昇降機構によってドレッサアーム85を下降させ、ドレッサアーム85が所定の高さ位置となった時点で、第2の昇降機構によりドレッシング部材86を下降させることができる。このような構成によれば、ドレッシング時の研磨面に対する押圧力やドレッシング部材86の高さを正確に調整することができる。
In the above-described example, the
図11(a)はアトマイザ34Aを示す斜視図である。アトマイザ34Aは、下部に1または複数の噴射孔を有するアーム90と、このアーム90に連結された流体流路91と、アーム90を支持する揺動軸94とを備えている。図11(b)はアーム90の下部を示す模式図である。図11(b)に示す例では、アーム90の下部には複数の噴射孔90aが等間隔に形成されている。流体流路91としては、チューブ、またはパイプ、またはこれらの組み合わせから構成することができる。
FIG. 11A is a perspective view showing the
図12(a)はアトマイザ34Aの内部構造を示す側面図であり、図12(b)はアトマイザ34Aを示す平面図である。流体流路91の開口端部は、図示しない流体供給パイプに接続され、この流体供給パイプから流体が流体流路91に供給されるようになっている。用いられる流体の例としては、液体(例えば純水)、または液体と気体の混合流体(例えば、純水と窒素ガスの混合流体)などが挙げられる。流体流路91はアーム90の噴射孔90aに連通しており、流体は霧状となって噴射孔90aから研磨パッド10の研磨面に噴射される。
FIG. 12A is a side view showing the internal structure of the
アーム90は、図11(a)および図12(b)の点線で示すように、揺動軸94を中心として洗浄位置と退避位置との間で旋回可能となっている。アーム90の可動角度は約90°である。通常、アーム90は洗浄位置にあり、図1に示すように、研磨パッド10の研磨面の径方向に沿って配置されている。研磨パッド10の交換などのメンテナンス時には、アーム90は手動により退避位置に移動する。したがって、メンテナンス時にアーム90を取り外す必要がなく、メンテナンス性を向上させることができる。なお、回転機構を揺動軸94に連結し、この回転機構によりアーム90を旋回させてもよい。
As shown by the dotted lines in FIGS. 11A and 12B, the
図12(b)に示すように、アーム90の両側面には、互いに形状の異なる2つの補強部材96,96が設けられている。これらの補強部材96,96を設けることにより、洗浄位置と退避位置との間でアーム90が旋回動作を行ったときに、アーム90の軸心が大幅にぶれることがなく、アトマイジング動作を効果的に行うことができる。また、アトマイザ34Aは、アーム90の旋回位置(アーム90が旋回可能な角度範囲)を固定するためのレバー95を備えている。すなわち、レバー95を操作することにより、アーム90の旋回可能な角度を条件に合わせて調整することができる。レバー95を回すと、アーム90が自由に旋回可能となり、手動によりアーム90を洗浄位置と退避位置との間で移動させる。そして、レバー95を締めると、アーム90の位置が洗浄位置と退避位置のいずれかで固定される。
As shown in FIG. 12B, two reinforcing
アトマイザのアーム90は折りたたみ可能な構造とすることもできる。具体的には、アーム90をジョイントで連結された少なくとも2つのアーム部材から構成してもよい。この場合、折りたたまれたときのアーム部材同士がなす角度は、1°以上45°以下とし、好ましくは5°以上30°以下とする。アーム部材同士がなす角度が45°よりも大きいと、アーム90が占めるスペースが大きくなり、1°未満とすると、アーム90の幅を薄くせざるを得ず、機械的強度が低くなる。この例では、アーム90は揺動軸94周りに回転しないように構成してもよい。研磨パッド10の交換などのメンテナンス時には、アーム90を折りたたむことによって、アトマイザがメンテナンス作業の邪魔にならないようにすることができる。他の変形例としては、アトマイザのアーム90を伸縮自在な構造とすることもできる。この例でも、メンテナンス時にアーム90を縮めることによって、アトマイザが邪魔となることはない。
The
このアトマイザ34Aを設ける目的は、研磨パッド10の研磨面に残留する研磨屑や砥粒などを高圧の流体により洗い流すことである。アトマイザ34Aの流体圧による研磨面の浄化と、機械的接触であるドレッサ33Aによる研磨面の目立て作業により、より好ましいドレッシング、すなわち研磨面の再生を達成することができる。通常は接触型のドレッサ(ダイヤモンドドレッサ等)によるドレッシングの後に、アトマイザによる研磨面の再生を行う場合が多い。
The purpose of providing the
図13(a)は研磨液供給ノズル32Aを示す斜視図であり、図13(b)は研磨液供給ノズル32Aの先端を下から見た拡大模式図である。図13および図13(b)に示すように、研磨液供給ノズル32Aは、純水やスラリーなどの研磨液を研磨パッド10の研磨面に供給するための複数のチューブ100と、これら複数のチューブ100を覆うパイプアーム101と、パイプアーム101を支持する揺動軸102とを備えている。複数のチューブ100は、通常、純水を供給するための純水供給チューブと、異なる種類のスラリーを供給する複数のスラリー供給チューブとから構成される。複数のチューブ100として、例えば、スラリーが通液している2つ以上4つ以下(例えば3本)のスラリー供給チューブと、純水が通水している1つまたは2つの純水供給チューブから構成することができる。
FIG. 13A is a perspective view showing the polishing
複数のチューブ100は、パイプアーム101の内部を通ってパイプアーム101の先端まで延びており、パイプアーム101はチューブ100のほぼ全体を覆っている。パイプアーム101の先端には補強材103が固定されている。チューブ100の先端は研磨パッド10の上方に位置しており、チューブ100から研磨液が研磨パッド10の研磨面上に供給されるようになっている。図13(a)に示す矢印は、研磨面に供給される研磨液を表している。揺動軸102は図示しない回転機構(モータなど)に連結されており、揺動軸102を回転させることにより、研磨面上の所望の位置に研磨液を供給することが可能となっている。研磨パッド10の交換などのメンテナンス時には、パイプアーム101が揺動軸102を中心として回転機構により揺動し、研磨テーブル30Aの側方の退避位置に移動する。
The plurality of
上述したように、パイプアーム101によって複数のチューブ100のほぼ全体が覆われているので、パイプアーム101で複数のチューブ100をカバーしなかった場合に比べて、ノズル32A全体としての表面積が小さすることができる。したがって、研磨やアトマイザによる処理のときに舞い上がったスラリーの一部が付着する面積が小さくなる。その結果、付着したスラリーの落下に起因する研磨プロセスへの悪影響が防止され、さらに研磨液供給ノズル32Aの洗浄が容易となる。
As described above, since the plurality of
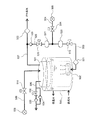
図14は、研磨部3の純水供給配管を示す模式図である。この基板処理装置では、第1研磨ユニット3Aと第2研磨ユニット3Bは1つのユニットとして第1研磨部3aを構成しており、第3研磨ユニット3Cと第4研磨ユニット3Dは1つのユニットとして第2研磨部3bを構成している。第1研磨部3aと第2研磨部3bとは互いに分割可能に構成されている。上述したように、研磨部3は、純水、空気、窒素ガスなどの種々の流体を使用する。例えば、図14に示すように、純水(DIW)は、図示しない純水供給源から基板処理装置の純水供給管110に供給される。この純水供給管110は研磨部3の研磨ユニット3A,3B,3C,3Dを通って延び、これら研磨ユニット3A,3B,3C,3Dにそれぞれ設けられた分配制御部113に接続されている。
FIG. 14 is a schematic diagram showing a pure water supply pipe of the polishing unit 3. In this substrate processing apparatus, the
純水供給管110は第1研磨部3aと第2研磨部3bとの間で分割されており、分割された純水供給管110の端部同士は図示しない連結機構により連結されている。各研磨ユニットで使用される純水の用途としては、トップリングの洗浄(例えば、トップリングの外周側面の洗浄、基板保持面の洗浄、リテーナリングの洗浄)、ウェハの搬送ハンドの洗浄(例えば、後述する第1および第2のリニアトランスポータの搬送ハンドの洗浄)、研磨されたウェハの洗浄、研磨パッドのドレッシング、ドレッサの洗浄(例えば、ドレッシング部材の洗浄)、ドレッサアームの洗浄、研磨液供給ノズルの洗浄、およびアトマイザによる研磨パッドの洗浄が挙げられる。
The pure
純水は純水供給管110を通って各分配制御部113に流入し、各分配制御部113により各ユースポイントに分配される。ユースポイントは、上述したトップリング洗浄用のノズルやドレッサ洗浄用のノズルなどの純水が使用される箇所である。純水は分配制御部113から研磨ユニット内に設けられた洗浄ノズル(例えば、上述したトップリング洗浄用のノズルやドレッサ洗浄用のノズル)などの末端機器に供給される。例えば、上述した研磨液供給ノズルの純水供給チューブ100(図13(a)参照)には、研磨ユニットごとの分配制御部113により調整された流量の純水が供給される。このように、分配制御部113は研磨ユニットごとに配置されているので、1つのヘッダから複数のパイプを介して各研磨ユニットに供給する従来の構造に比べて、パイプの本数を少なくすることができる。また、このことは、第1研磨部3aと第2研磨部3bとの間のパイプを連結する連結機構が少なくなることを意味するので、構造がシンプルになるとともに、純水のリークのリスクが低減される。なお、アトマイザは多量の純水を必要とするので、図14に示すように、アトマイザ専用の純水供給管112を設けることが好ましい。
Pure water flows into each
各分配制御部113は、トップリング洗浄用のノズル(図示せず)や純水供給チューブ100(図13(a)参照)などのユースポイントに連通するバルブボックス113aと、バルブボックス113aの上流側に設けられた圧力計113bと、この圧力計113bの上流側に設けられた流量レギュレータ113cとを備えている。バルブボックス113aは、ユースポイントにそれぞれ連通する複数のパイプと、これらパイプにそれぞれ設けられるバルブとを有している。
Each
圧力計113bは、バルブボックス113aに送られる純水の圧力を測定し、流量レギュレータ113cは、圧力計113bの測定値が所定の値に維持されるよう純水の流量を調整する。このように、純水の流量の制御がそれぞれの研磨ユニットで行われるので、研磨ユニット間での純水の使用による影響を低減させ、安定した純水の供給が可能になる。したがって、ある研磨ユニットでの純水の流量が他の研磨ユニットでの純水の使用の影響により不安定になるという従来の構造における問題を解決することができる。なお、図14に示す例では、各研磨ユニットに流量レギュレータ113cが設けられているが、2つの研磨ユニットにつき1つの流量レギュレータ113cを配置してもよい。例えば、研磨ユニット3A,3Bにそれぞれ設けられた2つのバルブボックス113aの上流側に1組の圧力計113bおよび流量レギュレータ113cを設け、同様に、研磨ユニット3C,3Dにそれぞれ設けられた2つのバルブボックス113aの上流側に1組の圧力計113bおよび流量レギュレータ113cを設けてもよい。
The
図14に示す例では、トップリング洗浄用のノズル(図示せず)や純水供給チューブ100などのユースポイント用の純水供給管110とは別に、アトマイザ34A,34B,34C,34D専用の純水供給管112が設けられている。純水供給管112は、アトマイザ34A,34B,34C,34Dに接続され、アトマイザ34A,34B,34C,34Dの上流側には、流量制御部114がそれぞれ設けられている。この流量制御部114は、純水供給管112から供給される純水の流量を調整し、その調整された流量の純水をアトマイザに送るように構成されている。
In the example shown in FIG. 14, a pure water dedicated to the
それぞれの流量制御部114は、上述した分配制御部113と同様に、バルブと、圧力計と、流量レギュレータとを有しており、これらの配置は分配制御部113における配置と同様である。制御部5は、流量制御部114の圧力計の測定値に基づき、所定の流量の純水が各アトマイザに供給されるように流量制御部114の流量レギュレータの動作を制御する。
Each
図14に示すように、純水供給管110と純水供給管112とは、それぞれ独立して純水供給源に連結されており、独立した純水供給経路が確保されている。このような配置により、アトマイザでの純水の使用が他のユースポイントでの純水の流量に影響を与えることを防止することができる。
As shown in FIG. 14, the pure
なお、図14は純水を供給する純水供給管110について説明しているが、図14に示す配管および分配制御部の配置は、エア、窒素ガス、スラリーなどの他の流体の供給管にも適用できる。例えば、複数種のスラリーを移送する複数のスラリー供給管を設け、これらのスラリー供給管に接続される分配制御部を研磨ユニットごとに設けることができる。各分配制御部は、研磨処理に応じて選択されたスラリーを上述した研磨液供給ノズル(図13(a)参照)に供給する。分配制御部は研磨ユニットごとに設けられるので、研磨液供給ノズルに供給されるスラリーの種類を研磨ユニットごとに変えることができる。さらに、研磨液供給ノズルに供給されるスラリーの流量を分配制御部によって調整することができる。
14 illustrates the pure
次に、ウェハを搬送するための搬送機構について説明する。図1に示すように、第1研磨ユニット3Aおよび第2研磨ユニット3Bに隣接して、第1リニアトランスポータ6が配置されている。この第1リニアトランスポータ6は、研磨ユニット3A,3Bが配列する方向に沿った4つの搬送位置(ロード/アンロード部側から順番に第1搬送位置TP1、第2搬送位置TP2、第3搬送位置TP3、第4搬送位置TP4とする)の間でウェハを搬送する機構である。
Next, a transport mechanism for transporting the wafer will be described. As shown in FIG. 1, a first
また、第3研磨ユニット3Cおよび第4研磨ユニット3Dに隣接して、第2リニアトランスポータ7が配置されている。この第2リニアトランスポータ7は、研磨ユニット3C,3Dが配列する方向に沿った3つの搬送位置(ロード/アンロード部側から順番に第5搬送位置TP5、第6搬送位置TP6、第7搬送位置TP7とする)の間でウェハを搬送する機構である
Further, the second linear transporter 7 is disposed adjacent to the
ウェハは、第1リニアトランスポータ6によって研磨ユニット3A,3Bに搬送される。上述したように、第1研磨ユニット3Aのトップリング31Aは、トップリングヘッド60のスイング動作により研磨位置と第2搬送位置TP2との間を移動する。したがって、トップリング31Aへのウェハの受け渡しは第2搬送位置TP2で行われる。同様に、第2研磨ユニット3Bのトップリング31Bは研磨位置と第3搬送位置TP3との間を移動し、トップリング31Bへのウェハの受け渡しは第3搬送位置TP3で行われる。第3研磨ユニット3Cのトップリング31Cは研磨位置と第6搬送位置TP6との間を移動し、トップリング31Cへのウェハの受け渡しは第6搬送位置TP6で行われる。第4研磨ユニット3Dのトップリング31Dは研磨位置と第7搬送位置TP7との間を移動し、トップリング31Dへのウェハの受け渡しは第7搬送位置TP7で行われる。
The wafer is transferred to the polishing
第1搬送位置TP1には、搬送ロボット22からウェハを受け取るためのリフタ11が配置されている。ウェハはこのリフタ11を介して搬送ロボット22から第1リニアトランスポータ6に渡される。リフタ11と搬送ロボット22との間に位置して、シャッタ(図示せず)が隔壁1aに設けられており、ウェハの搬送時にはシャッタが開かれて搬送ロボット22からリフタ11にウェハが渡されるようになっている。また、第1リニアトランスポータ6と、第2リニアトランスポータ7と、洗浄部4との間にはスイングトランスポータ12が配置されている。このスイングトランスポータ12は、第4搬送位置TP4と第5搬送位置TP5との間を移動可能なハンドを有しており、第1リニアトランスポータ6から第2リニアトランスポータ7へのウェハの受け渡しは、スイングトランスポータ12によって行われる。ウェハは、第2リニアトランスポータ7によって第3研磨ユニット3Cおよび/または第4研磨ユニット3Dに搬送される。また、研磨部3で研磨されたウェハはスイングトランスポータ12を経由して洗浄部4に搬送される。
A
以下、第1リニアトランスポータ6、第2リニアトランスポータ7、リフタ11、スイングトランスポータ12の構造について説明する。
図15は、第1リニアトランスポータ6を模式的に示す斜視図である。第1リニアトランスポータ6は、ウェハが載置される搬送ステージ(基板搬送ステージ)121a,122a,123a,124aをそれぞれ有する第1,第2,第3,第4搬送ハンド121,122,123,124と、第2,第3,第4搬送ハンド122,123,124をそれぞれ上下動させる3つの昇降駆動機構(例えばボールねじを用いたモータ駆動機構またはエアシリンダ)130A,130B,130Cと、第1,第2,第3,第4搬送ハンド121,122,123,124を水平方向に移動自在に支持する3つのリニアガイド132A,132B,132Cと、第1,第2,第3,第4搬送ハンド121,122,123,124を水平方向に駆動する3つの水平駆動機構134A,134B,134Cとを備えている。本実施形態では、水平駆動機構134A,134B,134Cはそれぞれ、一対のプーリ136と、これらプーリ136に掛けられたベルト137と、一対のプーリのうちのいずれか一方を回転させるサーボモータ138とを有している。
Hereinafter, the structures of the first
FIG. 15 is a perspective view schematically showing the first
搬送ステージ121a,122a,123a,124aの上面には複数のピンがそれぞれ設けられており、ウェハはこれらのピンの上に載置される。各搬送ステージ121a,122a,123a,124aには、透過型センサなどによりウェハの有無を検知するセンサ(図示せず)が構成されており、各搬送ステージ121a,122a,123a,124a上のウェハの有無を検知することができるようになっている。
A plurality of pins are provided on the upper surfaces of the
第1搬送ハンド121は第1リニアガイド132Aに支持され、第1水平駆動機構134Aに駆動されて第1搬送位置TP1と第4搬送位置TP4との間を移動する。この第1搬送ハンド121は、リフタ11からウェハを受け取り、それを第2リニアトランスポータ7に渡すためのパスハンドである。したがって、ウェハを第1研磨ユニット3Aおよび第2研磨ユニット3Bでは研磨せずに、第3研磨ユニット3Cおよび第4研磨ユニット3Dで研磨する場合に、第1搬送ハンド121が使用される。この第1搬送ハンド121には昇降駆動機構は設けられていなく、第1搬送ハンド121の搬送ステージ(基板パスステージ)121aは水平方向にのみ移動可能となっている。
The
第2搬送ハンド122は第2リニアガイド132Bに支持され、第2水平駆動機構134Bに駆動されて第1搬送位置TP1と第2搬送位置TP2との間を移動する。この第2搬送ハンド122は、ウェハをリフタ11から第1研磨ユニット3Aに搬送するためのアクセスハンドとして機能する。すなわち、第2搬送ハンド122は第1搬送位置TP1に移動し、ここでリフタ11からウェハを受け取る。そして、第2搬送ハンド122は再び第2搬送位置TP2に移動し、ここで搬送ステージ122a上のウェハをトップリング31Aに渡す。第2搬送ハンド122には第1昇降駆動機構130Aが連結されており、これらは一体に水平方向に移動するようになっている。搬送ステージ122a上のウェハをトップリング31Aに渡すときは、第2搬送ハンド122は第1昇降駆動機構130Aに駆動されて上昇し、トップリング31Aにウェハを渡した後、第1昇降駆動機構130Aに駆動されて下降する。
The
搬送ステージ122aの上面には、トップリング31Aの外周縁の下端(リテーナリング40の下端)に係合する複数の(図では3つの)のアクセスガイド140が設けられている。これらのアクセスガイド140の内側はテーパ面となっており、搬送ステージ122aが上昇してトップリング31Aにアクセスすると、トップリング31Aがこれらのアクセスガイド140によって案内され、トップリング31Aと搬送ステージ122aとが互いに係合する。この係合によりトップリング31Aと搬送ステージ122a(すなわちウェハ)との間でセンタリングが行われる。このアクセスガイド140は、第3,第4搬送ハンド123,124の搬送ステージ123a,124aにも同様に設けられている。
A plurality of (three in the drawing) access guides 140 that are engaged with the lower end of the outer peripheral edge of the
第3搬送ハンド123と第4搬送ハンド124は第3リニアガイド132Cに支持されている。第3搬送ハンド123と第4搬送ハンド124とはエアシリンダ142によって互いに連結されており、これらは第3水平駆動機構134Cに駆動されて一体的に水平方向に移動するようになっている。エアシリンダ142は第3搬送ハンド123の搬送ステージ123aと第4搬送ハンド124の搬送ステージ124aとの間隔を調整する間隔調整機構として機能する。このエアシリンダ(間隔調整機構)142を設けた理由は、第1搬送位置TP1と第2搬送位置TP2との間隔と、第2搬送位置TP2と第3搬送位置TP3との間隔が異なる場合があるからである。エアシリンダ142は、第3搬送ハンド123および第4搬送ハンド124の移動中に間隔調整動作を行うことが可能である。
The
第3搬送ハンド123には第2昇降駆動機構130Bが連結され、第4搬送ハンド124には第3昇降駆動機構130Cが連結されており、第3搬送ハンド123と第4搬送ハンド124は、独立して昇降可能となっている。第3搬送ハンド123は、第1搬送位置TP1、第2搬送位置TP2、第3搬送位置TP3の間を移動し、同時に、第4搬送ハンド124は第2搬送位置TP2、第3搬送位置TP3、第4搬送位置TP4の間を移動する。
A second
第3搬送ハンド123は、ウェハをリフタ11から第2研磨ユニット3Bに搬送するためのアクセスハンドとして機能する。すなわち、第3搬送ハンド123は第1搬送位置TP1に移動し、ここでリフタ11からウェハを受け取り、さらに第3搬送位置TP3に移動し、搬送ステージ123a上のウェハをトップリング31Bに渡すように動作する。第3搬送ハンド123は、また、第1研磨ユニット3Aで研磨されたウェハを第2研磨ユニット3Bに搬送するためのアクセスハンドとしても機能する。すなわち、第3搬送ハンド123は第2搬送位置TP2に移動し、ここでトップリング31Aからウェハを受け取り、さらに第3搬送位置TP3に移動し、そして、搬送ステージ123a上のウェハをトップリング31Bに渡すように動作する。搬送ステージ123aとトップリング31Aまたはトップリング31Bとの間でのウェハの受け渡しを行うときは、第3搬送ハンド123は第2昇降駆動機構130Bに駆動されて上昇し、ウェハの受け渡しが終わった後は、第2昇降駆動機構130Bに駆動されて第3搬送ハンド123が下降する。
The
第4搬送ハンド124は、第1研磨ユニット3Aまたは第2研磨ユニット3Bで研磨されたウェハをスイングトランスポータ12に搬送するためのアクセスハンドとして機能する。すなわち、第4搬送ハンド124は第2搬送位置TP2または第3搬送位置TP3に移動し、ここでトップリング31Aまたはトップリング31Bから研磨されたウェハを受け取り、その後第4搬送位置TP4に移動する。トップリング31Aまたはトップリング31Bからウェハを受け取るときは、第4搬送ハンド124は第3昇降駆動機構130Cに駆動されて上昇し、ウェハを受け取った後、第3昇降駆動機構130Cに駆動されて下降する。
The
図16は、第1搬送ハンド121の搬送ステージ121a、第2搬送ハンド122の搬送ステージ122a、第3搬送ハンド123の搬送ステージ123a、および第4搬送ハンド124の搬送ステージ124aの高さ位置を示す模式図である。図16に示すように、4つの搬送ステージ121a〜124cは、高さの異なる3つの走行軸に沿って移動する。すなわち、搬送ステージ121aは、最も低い第1の走行軸に沿って移動し、搬送ステージ123aおよび搬送ステージ124aは、最も高い第3の走行軸に沿って移動し、搬送ステージ122aは、第1の走行軸と第3の走行軸の間に位置する第2の走行軸に沿って移動する。したがって、各搬送ステージ121a,122a,123a,124cは互いに接触することなく、水平方向に移動可能となっている。
FIG. 16 shows the height positions of the
このような配置とすることにより、第1リニアトランスポータ6は、リフタ11から受け取ったウェハを第1研磨ユニット3Aまたは第2研磨ユニット3Bのいずれかに搬送することができる。例えば、ウェハを第1研磨ユニット3Aに搬送し、そのウェハを第1の研磨ユニット3Aで研磨している間に、次のウェハを第2研磨ユニット3Bに直接送って研磨することができる。したがって、スループットが向上する。さらに、第1研磨ユニット3Aで研磨されたウェハを第2研磨ユニット3Bに搬送し、第2研磨ユニット3Bでウェハをさらに研磨することも可能である。また、第2,第3,第4搬送ハンド122,123,124は、水平方向に移動しながら上下方向に移動することが可能である。例えば、第2搬送ハンド122が第1搬送位置TP1でウェハを受け取った後、第2搬送位置TP2まで移動する間に上昇して、第2搬送位置TP2に到着後、速やかにウェハをトップリング31Aに渡すことができる。このような動作は、第3および第4搬送ハンド123,124でも同様に行うことができる。したがって、ウェハの搬送時間が短縮され、基板処理装置のスループットを向上させることができる。さらに、第1搬送ハンド121の搬送ステージ121aは他の搬送ハンドよりも低い位置にあるので、他の搬送ハンドがトップリングにアクセスしているときであっても、第4搬送位置TP4にウェハを搬送することができる。このように、3つの走行軸を設けたことにより、ウェハの搬送の自由度が増す。
With this arrangement, the first
第2リニアトランスポータ7は、第1リニアトランスポータ6と基本的に同一の構成を有しているが、第1搬送ハンド121に相当する要素を備えていない点で第1リニアトランスポータ6と相違する。図17は、第2リニアトランスポータ7の搬送ステージの高さ位置を示す模式図である。特に説明しない第2リニアトランスポータ7の構成は、第1リニアトランスポータ6と同一であるので、その重複する説明を省略する。第2リニアトランスポータ7は、第5搬送ハンド125、第6搬送ハンド126、および第7搬送ハンド127を備えている。これら第5搬送ハンド125、第6搬送ハンド126、および第7搬送ハンド127は、ウェハが載置される搬送ステージ125a,126a,127aをそれぞれ有している。
The second linear transporter 7 has basically the same configuration as the first
第5搬送ハンド125と第6搬送ハンド126とは、間隔調整機構としてのエアシリンダ142によって互いに連結されており、これにより第5搬送ハンド125と第6搬送ハンド126は一体に水平方向に移動する。搬送ステージ125aと搬送ステージ126aは第5走行軸に沿って移動し、搬送ステージ127aは、第5走行軸よりも低い位置にある第4走行軸に沿って移動するようになっている。したがって、各搬送ステージ125a,126a,127aは互いに接触することなく、水平方向に移動可能となっている。なお、第4走行軸および第5走行軸は、第1リニアトランスポータ6の第2走行軸および第3走行軸と同じ高さに位置している。
The
第5搬送ハンド125は、第5搬送位置TP5と第6搬送位置TP6との間を移動する。この第5搬送ハンド125は、トップリング31Cとの間でウェハの受け渡しを行うアクセスハンドとして機能する。第6搬送ハンド126は第6搬送位置TP6と第7搬送位置TP7との間を移動する。この第6搬送ハンド126は、トップリング31Cからウェハを受け取り、それをトップリング31Dに渡すためのアクセスハンドとして機能する。第7搬送ハンド127は、第7搬送位置TP7と第5搬送位置TP5との間を移動する。この第7搬送ハンド127は、トップリング31Dからウェハを受け取り、それを第5搬送位置TP5に搬送するためのアクセスハンドとして機能する。なお、説明は省略するが、搬送ハンド125,126,127とトップリング31C,31Dとのウェハの受け渡し時の動作は、第1リニアトランスポータ6の上述した動作と同様である。
The
トップリング31A〜31Dとして、図4に示すトップリングが用いられる場合、第1および第2のリニアトランスポータ6,7とのウェハの受け渡しを容易にするために、以下に説明するリテーナリングステーションを第2搬送位置TP2,第3搬送位置TP3,第6搬送位置TP6,第7搬送位置TP7にそれぞれ設けることが好ましい。
When the top rings shown in FIG. 4 are used as the top rings 31A to 31D, a retainer ring station described below is used in order to facilitate delivery of the wafer to the first and second
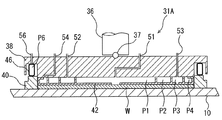
図18は、第2搬送位置TP2,第3搬送位置TP3,第6搬送位置TP6,第7搬送位置TP7に設けられたリテーナリングステーションと、搬送ステージと、トップリングとの配置を説明する斜視図である。図19は、第2搬送位置TP2に配置されたリテーナリングステーションと搬送ステージを示す斜視図である。図20(a)はリテーナリングステーションとトップリングとの位置関係を示す側面図であり、図20(b)はリテーナリングステーションと搬送ステージとの位置関係を示す平面図である。以下、第2搬送位置TP2に配置されたリテーナリングステーションについて説明する。 FIG. 18 is a perspective view for explaining the arrangement of the retainer ring station, the transport stage, and the top ring provided at the second transport position TP2, the third transport position TP3, the sixth transport position TP6, and the seventh transport position TP7. It is. FIG. 19 is a perspective view showing the retainer ring station and the transfer stage arranged at the second transfer position TP2. FIG. 20A is a side view showing the positional relationship between the retainer ring station and the top ring, and FIG. 20B is a plan view showing the positional relationship between the retainer ring station and the transfer stage. Hereinafter, the retainer ring station arranged at the second transfer position TP2 will be described.
リテーナリングステーション143は、トップリング31Aのリテーナリング40を押し上げる複数の押し上げ機構144と、これらの押し上げ機構144を支持するサポートベース145とを備えている。押し上げ機構144の高さ方向の位置は、トップリング31Aと第1リニアトランスポータ6の搬送ステージ(122aまたは123aまたは124a)との間にある。また、図20(b)に示すように、押し上げ機構144と搬送ステージとは、互いに接触しないように配置されている。
The
図21はリテーナリングステーション上にトップリングが載置された状態を示す斜視図である。図22(a)は押し上げ機構144を示す断面図であり、図22(b)はリテーナリングに接触したときの押し上げ機構144を示す断面図である。押し上げ機構144は、リテーナリング40に接触する押し上げピン146と、押し上げピン146を上方に押す押圧機構としてのばね147と、押し上げピン146およびばね147を収容するケーシング148とを備えている。押し上げ機構144は、押し上げピン146がリテーナリング40の下面に対向する位置に配置される。トップリング31Aが下降すると、リテーナリング40の下面が押し上げピン146に接触する。ばね147はリテーナリング40を押し上げるのに十分な押圧力を有している。したがって、図22(b)に示すように、リテーナリング40は押し上げピン146に押し上げられ、ウェハWよりも上方の位置まで移動する。
FIG. 21 is a perspective view showing a state in which the top ring is placed on the retainer ring station. 22A is a cross-sectional view showing the push-up
次に、第1リニアトランスポータ5からトップリング31Aにウェハを渡すときの動作について説明する。まず、トップリング31Aは、研磨位置から第1搬送位置TP1まで移動する。次いでトップリング31Aが下降し、上述したようにリテーナリング40がリテーナリングステーション143の押し上げ機構144により押し上げられる。トップリング31Aが下降しているとき、第1リニアトランスポータ5の搬送ステージが上昇し、リテーナリング40に接触することなくトップリング31Aの真下まで移動する。この状態で、ウェハWは搬送ステージからトップリング31Aに渡される。そして、トップリング31Aが上昇するとほぼ同時に搬送ステージが下降する。トップリング31Aはさらに研磨位置に移動してウェハWを研磨し、搬送ステージは次の搬送動作を開始する。トップリング31Aから第1リニアトランスポータ5にウェハを渡すときも同様の動作が行われる。
Next, an operation when a wafer is transferred from the first
このように、ウェハの受け渡し時には、トップリング31Aと搬送ステージは、ほぼ同時に互いに近接し、ほぼ同時に離間するので、スループットを向上させることができる。なお、第3搬送位置TP3,第6搬送位置TP6,第7搬送位置TP7に設けられるリテーナリングステーション143の構成も、上述のリテーナリングステーション143と同様であり、ウェハの受け渡し動作も同様に行われる。
As described above, when the wafer is transferred, the
リテーナリング40は、ウェハの研磨中に研磨パッドの研磨面と摺接するため、リテーナリング40の下面は徐々に摩耗する。リテーナリング40の摩耗が進行すると、研磨中にリテーナリング40がウェハを保持できなくなり、回転するトップリング31Aからウェハが飛び出してしまう。そのため、リテーナリング40を定期的に交換することが必要となる。従来では、リテーナリング40の交換時期はウェハの処理枚数に基づいて判断されていたため、リテーナリング40がまだ使用可能であっても新しいリテーナリング40に交換されたり、または摩耗が進みすぎてウェハがトップリング31Aから飛び出すことがあった。このような問題を解決するために、次に示す例では、リテーナリング40の摩耗量を測定する摩耗測定器がリテーナリングステーション143に設けられている。
Since the
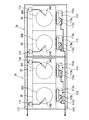
図23は、リテーナリング40の摩耗量を測定する摩耗測定器を備えたリテーナリングステーション143を示す斜視図であり、図24は、図23に示す摩耗測定器を示す拡大断面図であり、図25は、リテーナリングステーション143およびトップリング31Aの側面図である。摩耗測定器149は、押し上げ機構144を支持するサポートベース145に設置されており、摩耗測定器149と押し上げ機構144の相対位置は固定されている。摩耗測定器149は、図24に示すように、リテーナリング40の下面に接触する接触部材149aと、この接触部材149aを上方に押すばね149bと、接触部材149aを上下方向に移動可能に支持する直動ガイド149cと、接触部材149aの変位を測定する接触式変位センサ(変位測定器)149dとを備えている。直動ガイド149cとしてはボールスプラインを用いることができる。なお、接触式変位センサに代えて、光学式変位センサなどの非接触式変位センサを用いてもよい。
23 is a perspective view showing a
接触部材149aは、横から見たときに逆L字型の形状を有しており、その下端は、押し上げピン146とほぼ同じ高さに位置している。トップリング31Aがリテーナリングステーション143に載置されたときに、押し上げピン146とほぼ同時に接触部材149aの下端がリテーナリング40の下面と接触するようになっている。変位センサ149dは接触部材149aの上方に配置されている。ばね149bによって上方に付勢されている接触部材149aの上端は、常に変位センサ149dと接触している。したがって、接触部材149aの上下方向の変位は、変位センサ149dによって測定される。変位センサ149dは制御部5に接続されており、変位センサ149dの測定値は制御部5に送られるようになっている。
The
トップリング31Aが下降し、リテーナリングステーション143の上に置かれると、押し上げピン146および接触部材149aはトップリング31Aのリテーナリング40の下面に接触する。トップリング31Aは所定の高さ位置で停止するまで下降を続け、同時にリテーナリング40は押し上げピン146によって押し上げられる。このとき、接触部材149aはリテーナリング40によって押し下げられる。接触部材149aの変位は、変位センサ149dによって測定され、この測定値は制御部5に送信される。変位センサ149dによる測定が行われている間、トップリング31Aと搬送ステージとの間ではウェハの受け渡しが行われる。
When the
接触部材149aの変位、すなわち変位センサ149dの測定値は、リテーナリング40の摩耗量によって変化する。より具体的には、リテーナリング40の摩耗量が増えると、変位センサ149dの測定値は小さくなる。制御部5には、リテーナリング40の交換時期を示す所定のしきい値が設定されている。制御部5は、変位センサ149dの測定値がしきい値に達したことを検出することにより、リテーナリング40の交換時期を決定する。なお、第3搬送位置TP3,第6搬送位置TP6,第7搬送位置TP7に設けられるリテーナリングステーションも、上述のリテーナリングステーション143と同様に摩耗測定器149を設けることが好ましい。
The displacement of the
この例によれば、リテーナリング40の摩耗量に基づいてリテーナリング40の交換時期が決定されるので、リテーナリング40の交換頻度を減らせ、コストを下げることができる。また、研磨中のウェハの飛び出しを未然に防止することができる。さらに、リテーナリング40の摩耗量の測定は、トップリング31Aと搬送ステージとの間でのウェハの受け渡しの間に行われるので、リテーナリング40の摩耗量の測定動作が装置全体のスループットを低下させることがない。すなわち、押し上げピン146によるリテーナリング40の押し上げ動作と摩耗測定器149によるリテーナリング40の摩耗量測定動作は、必然的に同時に行なわれるため、リテーナリング40の摩耗量測定のための時間を設ける必要がない。したがって、装置全体のスループットが向上する。
According to this example, since the replacement time of the
図26はリフタ11の構造を示す斜視図である。リフタ11は、搬送ロボット22(図1参照)のアームがアクセスできる位置に配置されている。リフタ11は、ウェハが載置される載置ステージ150と、載置ステージ150を支持するサポートシャフト151と、載置ステージ150を上下動させる昇降駆動機構152とを備えている。昇降駆動機構152としてはボールねじを備えたモータ駆動機構や、エアシリンダなどが用いられる。載置ステージ150は第1搬送位置TP1に位置している。載置ステージ150の上面には4つのピン153が設けられており、ウェハWはこれらピン153の上に載置される。搬送ロボット22の下側のアームは、その軸心回りに180度回転することでウェハを反転させた後、そのウェハをリフタ11の載置ステージ150上に載置するようになっている。図26は、反転させられたウェハWを示している。本実施形態では、搬送ロボット22のアームが反転機としても機能するので、従来必要であった反転機を不要とすることができる。したがって、リフタがウェハWを受け取った後のウェハWを反転させる工程を省略でき、処理全体のスループットを向上させることができる。
FIG. 26 is a perspective view showing the structure of the
第1搬送位置TP1にある第1リニアトランスポータ6の搬送ステージ122a(または121aまたは123a)と、リフタ11の載置ステージ150とは、同じ垂直軸上に沿って配列されている。図26に示すように、垂直方向から見たときに、搬送ステージ122aと載置ステージ150とは互いに重ならない形状を有している。より具体的には、第1リニアトランスポータ6の搬送ステージ122aには、リフタ11の載置ステージ150を通過させる切り欠き155が形成されている。この切り欠き155は載置ステージ150よりもやや大きく形成されている。
The
リフタ11は、搬送ロボット22のアームによって反転されたウェハWを、載置ステージ150を上昇させた位置で受け取り、その後載置ステージ150が昇降駆動機構152に駆動されて下降する。載置ステージ150が第1リニアトランスポータ6の搬送ステージ122aを通過するとき、ウェハWのみが搬送ステージ122a上に載置され、載置ステージ150は所定の停止位置まで下降を続ける。これにより、ウェハWがリフタ11から第1リニアトランスポータ6に受け渡される。本実施形態では、搬送ロボット22のアームが反転機としても機能するので、従来必要であった反転機を不要とすることができる。したがって、搬送ロボット22から第1リニアトランスポータ6に搬送されるときに行われるウェハの受け渡しの回数を減らすことができ、ウェハの受け渡しのミスや受け渡し時間を減らすことができる。
The
リフタ11のサポートシャフト151は逆L字型の形状を有しており、その垂直部分は載置ステージ150の外側に位置している。すなわち、リフタ11を垂直方向から見たときに、載置ステージ150とサポートシャフト151の垂直部分とは互いに重ならない位置にある。さらに、サポートシャフト151は、第1リニアトランスポータ6の搬送ステージの走行路から外れた位置にある。したがって、リフタ11の載置ステージ150の上下方向の位置に関係なく、第1リニアトランスポータ6の搬送ステージは第1搬送位置TP1に進入することができ、スループットを上げることができる。
The
図27はスイングトランスポータ12の構造を示す斜視図である。スイングトランスポータ12は、基板処理装置のフレーム160に設置されており、垂直方向に延びるリニアガイド161と、リニアガイド161に取り付けられたスイング機構162と、スイング機構162を垂直方向に移動させる駆動源としての昇降駆動機構165とを備えている。この昇降駆動機構165としては、サーボモータとボールねじを有するロボシリンダなどを採用することができる。スイング機構162にはスイングアーム166を介して反転機構167が連結されている。さらに反転機構167にはウェハWを把持する把持機構170が連結されている。スイングトランスポータ12の側方には、図示しないフレームに設置されたウェハWの仮置き台180が配置されている。この仮置き台180は、図1に示すように、第1リニアトランスポータ6に隣接して配置されており、第1リニアトランスポータ6と洗浄部4との間に位置している。
FIG. 27 is a perspective view showing the structure of the
スイングアーム166は、スイング機構162の図示しないモータの駆動により該モータの回転軸を中心として旋回するようになっている。これにより、反転機構167および把持機構170が一体的に旋回運動し、把持機構170は、第4搬送位置TP4、第5搬送位置TP5、および仮置き台180の間を移動する。
The
把持機構170は、ウェハWを把持する一対の把持アーム171を有している。それぞれの把持アーム171の両端には、ウェハWの外周縁を把持するチャック172が設けられている。これらのチャック172は把持アーム171の両端から下方に突出して設けられている。さらに把持機構170は、一対の把持アーム171をウェハWに近接および離間する方向に移動させる開閉機構173を備えている。
The
ウェハWを把持する場合には、把持アーム171を開いた状態で、把持アーム171のチャック172がウェハWと同一平面内に位置するまで把持機構170を昇降駆動機構165により下降させる。そして、開閉機構173を駆動して把持アーム171を互いに近接する方向に移動させ、把持アーム171のチャック172でウェハWの外周縁を把持する。この状態で、昇降駆動機構165により把持アーム171を上昇させる。
When gripping the wafer W, the
反転機構167は、把持機構170に連結された回転軸168と、この回転軸168を回転させるモータ(図示せず)とを有している。モータにより回転軸168を駆動させることにより、把持機構170は、その全体が180度回転し、これにより把持機構170に把持されたウェハWが反転する。このように、把持機構170全体が反転機構167により反転するので、従来必要であった把持機構と反転機構との間のウェハの受け渡しを省くことができる。なお、ウェハWを第4搬送位置TP4から第5搬送位置TP5に搬送するときは、反転機構167はウェハWを反転させず、被研磨面が下を向いた状態でウェハWが搬送される。一方、ウェハWを第4搬送位置TP4または第5搬送位置TP5から仮置き台180に搬送するときは、研磨された面が上を向くように反転機構167によってウェハWが反転させられる。
The reversing
仮置き台180は、ベースプレート181と、このベースプレート181の上面に固定された複数の(図27では2本の)垂直ロッド182と、ベースプレート181の上面に固定された1つの逆L字型の水平ロッド183とを有している。水平ロッド183は、ベースプレート181の上面に接続された垂直部183aと、この垂直部183aの上端から把持機構170に向かって水平に延びる水平部183bとを有している。水平部183bの上面にはウェハWを支持するための複数の(図27では2つの)ピン184が設けられている。垂直ロッド182の上端にも、ウェハWを支持するためのピン184がそれぞれ設けられている。これらのピン184の先端は同一水平面内に位置している。水平ロッド183は、垂直ロッド182よりもウェハWの旋回移動の中心(すなわち、スイング機構162のモータの回転軸)に近い位置に配置されている。
The temporary table 180 includes a
反転機構167により反転させられた把持機構170は、ウェハWを把持したまま、水平ロッド183の水平部183bとベースプレート181との間の隙間に進入し、全てのピン184がウェハWの下方に位置したときに、スイング機構162による把持機構170の旋回が停止される。この状態で把持アーム171を開くことでウェハWが仮置き台180に載置される。仮置き台180に載置されたウェハWは、次に説明する、洗浄部4の搬送ロボットによって洗浄部4に搬送される。
The
図28(a)は洗浄部4を示す平面図であり、図28(b)は洗浄部4を示す側面図である。図28(a)および図28(b)に示すように、洗浄部4は、第1洗浄室190と、第1搬送室191と、第2洗浄室192と、第2搬送室193と、乾燥室194とに区画されている。第1洗浄室190内には、縦方向に沿って配列された上側一次洗浄モジュール201Aおよび下側一次洗浄モジュール201Bが配置されている。上側一次洗浄モジュール201Aは下側一次洗浄モジュール201Bの上方に配置されている。同様に、第2洗浄室192内には、縦方向に沿って配列された上側二次洗浄モジュール202Aおよび下側二次洗浄モジュール202Bが配置されている。上側二次洗浄モジュール202Aは下側二次洗浄モジュール202Bの上方に配置されている。一次および二次洗浄モジュール201A,201B,202A,202Bは、洗浄液を用いてウェハを洗浄する洗浄機である。これらの一次および二次洗浄モジュール201A,201B,202A,202Bは垂直方向に沿って配列されているので、フットプリント面積が小さいという利点が得られる。
FIG. 28A is a plan view showing the cleaning unit 4, and FIG. 28B is a side view showing the cleaning unit 4. As shown in FIGS. 28A and 28B, the cleaning unit 4 includes a
上側二次洗浄モジュール202Aと下側二次洗浄モジュール202Bとの間には、ウェハの仮置き台203が設けられている。乾燥室194内には、縦方向に沿って配列された上側乾燥モジュール205Aおよび下側乾燥モジュール205Bが配置されている。これら上側乾燥モジュール205Aおよび下側乾燥モジュール205Bは互いに隔離されている。上側乾燥モジュール205Aおよび下側乾燥モジュール205Bの上部には、清浄な空気を乾燥モジュール205A,205B内にそれぞれ供給するフィルタファンユニット207,207が設けられている。上側一次洗浄モジュール201A、下側一次洗浄モジュール201B、上側二次洗浄モジュール202A、下側二次洗浄モジュール202B、仮置き台203、上側乾燥モジュール205A、および下側乾燥モジュール205Bは、図示しないフレームにボルトなどを介して固定されている。
A temporary wafer placement table 203 is provided between the upper
第1搬送室191には、上下動可能な第1搬送ロボット209が配置され、第2搬送室193には、上下動可能な第2搬送ロボット210が配置されている。第1搬送ロボット209および第2搬送ロボット210は、縦方向に延びる支持軸211,212にそれぞれ移動自在に支持されている。第1搬送ロボット209および第2搬送ロボット210は、その内部にモータなどの駆動機構を有しており、支持軸211,212に沿って上下に移動自在となっている。第1搬送ロボット209は、搬送ロボット22と同様に、上下二段のハンドを有している。第1搬送ロボット209は、図28(a)の点線が示すように、その下側のハンドが上述した仮置き台180にアクセス可能な位置に配置されている。第1搬送ロボット209の下側のハンドが仮置き台180にアクセスするときには、隔壁1bに設けられているシャッタ(図示せず)が開くようになっている。
A
第1搬送ロボット209は、仮置き台180、上側一次洗浄モジュール201A、下側一次洗浄モジュール201B、仮置き台203、上側二次洗浄モジュール202A、下側二次洗浄モジュール202Bの間でウェハWを搬送するように動作する。洗浄前のウェハ(スラリーが付着しているウェハ)を搬送するときは、第1搬送ロボット209は、下側のハンドを用い、洗浄後のウェハを搬送するときは上側のハンドを用いる。第2搬送ロボット210は、上側二次洗浄モジュール202A、下側二次洗浄モジュール202B、仮置き台203、上側乾燥モジュール205A、下側乾燥モジュール205Bの間でウェハWを搬送するように動作する。第2搬送ロボット210は、洗浄されたウェハのみを搬送するので、1つのハンドのみを備えている。図1に示す搬送ロボット22は、その上側のハンドを用いて上側乾燥モジュール205Aまたは下側乾燥モジュール205Bからウェハを取り出し、そのウェハをウェハカセットに戻す。搬送ロボット22の上側ハンドが乾燥モジュール205A,205Bにアクセスするときには、隔壁1aに設けられているシャッタ(図示せず)が開くようになっている。
The
洗浄部4は、2台の一次洗浄モジュールおよび2台の二次洗浄モジュールを備えているので、複数のウェハを並列して洗浄する複数の洗浄ラインを構成することができる。「洗浄ライン」とは、洗浄部4の内部において、一つのウェハが複数の洗浄モジュールによって洗浄される際の移動経路のことである。例えば、図29に示すように、1つのウェハを、第1搬送ロボット209、上側一次洗浄モジュール201A、第1搬送ロボット209、上側二次洗浄モジュール202A、第2搬送ロボット210、そして上側乾燥モジュール205Aの順で搬送し(洗浄ライン1参照)、これと並列して、他のウェハを、第1搬送ロボット209、下側一次洗浄モジュール201B、第1搬送ロボット209、下側二次洗浄モジュール202B、第2搬送ロボット210、そして下側乾燥モジュール205Bの順で搬送することができる(洗浄ライン2参照)。このように2つの並列する洗浄ラインにより、複数(典型的には2枚)のウェハをほぼ同時に洗浄および乾燥することができる。
Since the cleaning unit 4 includes two primary cleaning modules and two secondary cleaning modules, a plurality of cleaning lines for cleaning a plurality of wafers in parallel can be configured. The “cleaning line” is a moving path when one wafer is cleaned by a plurality of cleaning modules inside the cleaning unit 4. For example, as shown in FIG. 29, one wafer is divided into a
また、2つの並列する洗浄ラインにおいて、複数のウェハを所定の時間差を設けて洗浄および乾燥することもできる。所定の時間差で洗浄することの利点は次の通りである。第1搬送ロボット209および第2搬送ロボット210は、複数の洗浄ラインで兼用されている。このため、複数の洗浄または乾燥処理が同時に終了した場合には、これらの搬送ロボットが即座にウェハを搬送できず、スループットを悪化させてしまう。このような問題を回避するために、複数のウェハを所定の時間差で洗浄および乾燥することによって、処理されたウェハを速やかに搬送ロボット209,210によって搬送することができる。
Further, in two parallel cleaning lines, a plurality of wafers can be cleaned and dried with a predetermined time difference. The advantages of cleaning at a predetermined time difference are as follows. The
研磨されたウェハにはスラリーが付着しており、その状態でウェハを長い時間放置することは好ましくない。これは、配線金属としての銅がスラリーによって腐食することがあるからである。この洗浄部4によれば、2台の一次洗浄モジュールが設けられているので、先行するウェハが上側一次洗浄モジュール201Aまたは下側一次洗浄モジュール201Bのいずれかで洗浄されている場合でも、他方の一次洗浄モジュールにウェハを搬入してこれを洗浄することができる。したがって、高スループットを実現できるだけでなく、研磨後のウェハを直ちに洗浄して銅の腐食を防止することができる。
The slurry is adhered to the polished wafer, and it is not preferable to leave the wafer for a long time in that state. This is because copper as a wiring metal may be corroded by the slurry. According to the cleaning unit 4, since two primary cleaning modules are provided, even when the preceding wafer is cleaned by either the upper
また、一次洗浄のみが必要な場合は、図30に示すように、ウェハを、第1搬送ロボット209、上側一次洗浄モジュール201A、第1搬送ロボット209、仮置き台203、第2搬送ロボット210、そして上側乾燥モジュール205Aの順で搬送することができ、第2洗浄室192での二次洗浄を省略することができる。さらに、図31に示すように、例えば、下側二次洗浄モジュール202Bが故障中のときには、上側二次洗浄モジュール202Aにウェハを搬送することができる。このように、第1搬送ロボット209および第2搬送ロボット210により、必要に応じてウェハを所定の洗浄ラインに振り分けることができる。このような洗浄ラインの選定は制御部5によって決定される。
When only the primary cleaning is required, as shown in FIG. 30, the wafer is transferred to the
各洗浄モジュール201A,201B,202A,202Bは、故障を検知する検知器(図示せず)を有している。洗浄モジュール201A,201B,202A,202Bのいずれかに故障が生じたとき、検知器がこれを検知して制御部5に信号を送るようになっている。制御部5は、故障した洗浄モジュールを回避する洗浄ラインを選定し、現在の洗浄ラインを新たに選定された洗浄ラインに切り替える。なお、本実施形態では、2台の一次洗浄モジュールと2台の二次洗浄モジュールが設けられているが、本発明はこれに限らず、一次洗浄モジュールおよび/または二次洗浄モジュールを3台以上としてもよい。
Each
また、第1洗浄室190に仮置き台を設けてもよい。例えば、仮置き台203と同様に、上側一次洗浄モジュール201Aと下側一次洗浄モジュール201Bとの間に仮置き台を設置することができる。ある洗浄モジュールが故障した場合は、2枚のウェハを仮置き台180(図28(a)参照)と第1洗浄室190内の仮置き台に搬送することができる。
In addition, a temporary placement table may be provided in the
一次洗浄モジュール201A,201Bに使用される洗浄液の濃度と、二次洗浄モジュール202A,202Bに使用される洗浄液の濃度は異ならせてもよい。例えば、一次洗浄モジュール201A,201Bに使用される洗浄液の濃度を、二次洗浄モジュール202A,202Bに使用される洗浄液の濃度よりも高くする。通常、洗浄効果は、洗浄液の濃度と洗浄時間にほぼ比例すると考えられる。したがって、一次洗浄で濃度の高い洗浄液を用いることにより、ウェハの汚れがひどい場合であっても、一次洗浄の時間と二次洗浄の時間とをほぼ等しくすることができる。
The concentration of the cleaning liquid used in the
本実施形態では、一次洗浄モジュール201A,201Bおよび二次洗浄モジュール202A,202Bは、ロールスポンジ型の洗浄機である。一次洗浄モジュール201A,201Bおよび二次洗浄モジュール202A,202Bは同一の構成を有しているので、以下、一次洗浄モジュール201Aについて説明する。
図32は、一次洗浄モジュール201Aを示す斜視図である。図32に示すように、一次洗浄モジュール201AはウェハWを保持して回転させる4つのローラ301,302,303,304と、ウェハWの上下面に接触するロールスポンジ(洗浄具)307,308と、これらのロールスポンジ307,308を回転させる回転機構310,311と、ウェハWの上下面に洗浄液(例えば純水)を供給する洗浄液供給ノズル315,316と、ウェハWの上下面にエッチング液(薬液)を供給するエッチング液供給ノズル317,318とを備えている。ローラ301,302,303,304は図示しない駆動機構(例えばエアシリンダ)によって、互いに近接および離間する方向に移動可能となっている。
In the present embodiment, the
FIG. 32 is a perspective view showing the
上側のロールスポンジ307を回転させる回転機構310は、その上下方向の動きをガイドするガイドレール320に取り付けられている。また、この回転機構310は昇降駆動機構321に支持されており、回転機構310および上側のロールスポンジ307は昇降駆動機構321により上下方向に移動されるようになっている。なお、図示しないが、下側のロールスポンジ308を回転させる回転機構311もガイドレールに支持されており、昇降駆動機構によって回転機構311および下側のロールスポンジ308が上下動するようになっている。なお、昇降駆動機構としては、例えばボールねじを用いたモータ駆動機構またはエアシリンダが使用される。
A
ウェハWの搬入搬出時には、ロールスポンジ307,308は互いに離間した位置にある。ウェハWの洗浄時には、これらロールスポンジ307,308は互いに近接する方向に移動してウェハWの上下面に接触する。ロールスポンジ307,308がウェハWの上下面を押圧する力は、それぞれ昇降駆動機構321および図示しない昇降駆動機構によって調整される。上側のロールスポンジ307および回転機構310は昇降駆動機構321によって下方から支持されているので、上側のロールスポンジ307がウェハWの上面に加える押圧力は0〔N〕からの調整が可能である。
When the wafer W is loaded and unloaded, the
ローラ301は、保持部301aと肩部(支持部)301bの2段構成となっている。肩部301bの直径は保持部301aの直径よりも大きく、肩部301bの上に保持部301aが形成されている。ローラ302,303,304も、ローラ301と同一の構成を有している。第1搬送ロボット209の下側アームにより搬送されてきたウェハWは、まず肩部301b,302b,303b,304bの上に載置され、その後ローラ301,302,303,304がウェハWに向かって移動することにより保持部301a,302a,303a,304aに保持される。4つのローラ301,302,303,304のうちの少なくとも1つは図示しない回転機構によって回転駆動されるように構成され、これによりウェハWはその外周部がローラ301,302,303,304に保持された状態で回転する。肩部301b,302b,303b,304bは下方に傾斜したテーパ面となっており、保持部301a,302a,303a,304aによって保持されている間、ウェハWは肩部301b,302b,303b,304bと非接触に保たれる。
The
洗浄動作は次のように行なわれる。まず、ウェハWはローラ301,302,303,304に保持され、回転される。次いで、洗浄液供給ノズル315,316からウェハWの上面及び下面に洗浄水が供給される。そして、ロールスポンジ307,308がその軸心周りに回転しながらウェハWの上下面に摺接することによって、ウェハWの上下面をスクラブ洗浄する。スクラブ洗浄後、ロールスポンジ307,308を上方及び下方に待避させ、薬液供給ノズル317,318からそれぞれウェハWの上面、下面にエッチング液を供給し、ウェハWの上下面のエッチング(化学的洗浄)を行う。
The cleaning operation is performed as follows. First, the wafer W is held by
上側一次洗浄モジュール201A、下側一次洗浄モジュール201B、上側二次洗浄モジュール202A、下側二次洗浄モジュール202Bは、同一のタイプの洗浄モジュールでもよく、または異なるタイプの洗浄モジュールでもよい。例えば、一次洗浄モジュール201A,201Bを一対のロールスポンジでウェハの上下面をスクラブ洗浄するタイプの洗浄機とし、二次洗浄モジュール202A,202Bをペンシルスポンジ型洗浄機または2流体ジェットタイプの洗浄機とすることもできる。2流体ジェットタイプの洗浄機は、少量のCO2ガス(炭酸ガス)を溶解させた純水(DIW)とN2ガスとを混合し、その混合流体をウェハの表面に吹き付ける洗浄機である。このタイプの洗浄機は、微小な液滴と衝撃エネルギーでウェハ上の微小なパーティクルを除去することができる。特に、N2ガスの流量および純水の流量を適切に調整することにより、ダメージのないウェハ洗浄を実現することができる。さらに、炭酸ガスを溶解させた純水を用いることにより、静電気が原因とされるウェハの腐食の影響が緩和される。
The upper
次に、上側乾燥モジュール205Aおよび下側乾燥モジュール205Bの構成について説明する。上側乾燥モジュール205Aおよび下側乾燥モジュール205Bは、いずれもロタゴニ乾燥を行う乾燥機である。上側乾燥モジュール205Aおよび下側乾燥モジュール205Bは同一の構成を有しているので、以下、上側乾燥モジュール205Aについて説明する。図33は、上側乾燥モジュール205Aを示す縦断面図であり、図34は上側乾燥モジュール205Aを示す平面図である。上側乾燥モジュール205Aは、基台401と、この基台401に支持された4本の円筒状の基板支持部材402とを備えている。基台401は回転軸406の上端に固定されており、この回転軸406は軸受405によって回転自在に支持されている。軸受405は回転軸406と平行に延びる円筒体407の内周面に固定されている。円筒体407の下端は架台409に取り付けられており、その位置は固定されている。回転軸406は、プーリ411,412およびベルト414を介してモータ415に連結されており、モータ415を駆動させることにより、基台401はその軸心を中心として回転するようになっている。
Next, the configuration of the
基台401の上面には回転カバー450が固定されている。なお、図33は回転カバー450の縦断面を示している。回転カバー450はウェハWの全周を囲むように配置されている。回転カバー450の縦断面形状は径方向内側に傾斜している。また、回転カバー450の縦断面は滑らかな曲線から構成されている。回転カバー450の上端はウェハWに近接しており、回転カバー450の上端の内径は、ウェハWの直径よりもやや大きく設定されている。また、回転カバー450の上端には、基板支持部材402の外周面形状に沿った切り欠き450aが各基板支持部材402に対応して形成されている。回転カバー450の底面には、斜めに延びる液体排出孔451が形成されている。
A
ウェハWの上方には、ウェハWの表面(フロント面)に洗浄液として純水を供給するフロントノズル454が配置されている。フロントノズル454は、ウェハWの中心を向いて配置されている。このフロントノズル454は、図示しない純水供給源(洗浄液供給源)に接続され、フロントノズル454を通じてウェハWの表面の中心に純水が供給されるようになっている。洗浄液としては、純水以外に薬液が挙げられる。また、ウェハWの上方には、ロタゴニ乾燥を実行するための2つのノズル460,461が並列して配置されている。ノズル460は、ウェハWの表面にIPA蒸気(イソプロピルアルコールとN2ガスとの混合気)を供給するためのものであり、ノズル461はウェハWの表面の乾燥を防ぐために純水を供給するものである。これらノズル460,461はウェハWの径方向に沿って移動可能に構成されている。
Above the wafer W, a
回転軸406の内部には、洗浄液供給源465に接続されたバックノズル463と、乾燥気体供給源466に接続されたガスノズル464とが配置されている。洗浄液供給源465には、洗浄液として純水が貯留されており、バックノズル463を通じてウェハWの裏面に純水が供給されるようになっている。また、乾燥気体供給源466には、乾燥気体として、N2ガスまたは乾燥空気などが貯留されており、ガスノズル464を通じてウェハWの裏面に乾燥気体が供給されるようになっている。
Inside the
円筒体407の周囲には、基板支持部材402を持ち上げるリフト機構470が配置されている。このリフト機構470は、円筒体407に対して上下方向にスライド可能に構成されている。リフト機構470は、基板支持部材402の下端に接触する接触プレート470aを有している。円筒体407の外周面とリフト機構470の内周面との間には、第1の気体チャンバ471と第2の気体チャンバ472が形成されている。これら第1の気体チャンバ471と第2の気体チャンバ472は、それぞれ第1の気体流路474および第2の気体流路475に連通しており、これら第1の気体流路474および第2の気体流路475の端部は、図示しない加圧気体供給源に連結されている。第1の気体チャンバ471内の圧力を第2の気体チャンバ472内の圧力よりも高くすると、リフト機構470が上昇する。一方、第2の気体チャンバ472内の圧力を第1の気体チャンバ471内の圧力よりも高くすると、リフト機構470が下降する。なお、図33は、リフト機構470が下降位置にある状態を示している。
A
図35は図33に示す基台401の平面図である。図35に示すように、基台401は、4つのアーム401aを有し、各アーム401aの先端に基板支持部材402が上下動自在に支持されている。図36(a)は、図35に示す基板支持部材402および基台401の一部を示す平面図であり、図36(b)は、図35のA−A線断面図であり、図36(c)は図36(b)のB−B線断面図である。基台401のアーム401aは、基板支持部材402をスライド自在に保持する保持部401bを有している。なお、この保持部401bはアーム401aと一体に構成してもよい。保持部401bには上下に延びる貫通孔が形成されており、この貫通孔に基板支持部材402が挿入されている。貫通孔の直径は基板支持部材402の直径よりも僅かに大きく、したがって基板支持部材402は基台401に対して上下方向に相対移動可能となっており、さらに基板支持部材402は、その軸心周りに回転可能となっている。
FIG. 35 is a plan view of the base 401 shown in FIG. As shown in FIG. 35, the
基板支持部材402の下部には、スプリング受け402aが取り付けられている。基板支持部材402の周囲にはスプリング478が配置されており、スプリング受け402aによってスプリング478が支持されている。スプリング478の上端は保持部401b(基台401の一部)を押圧している。したがって、スプリング478によって基板支持部材402には下向きの力が作用している。基板支持部材402の外周面には、貫通孔の直径よりも大きい径を有するストッパー402bが形成されている。したがって、基板支持部材402は、図36(b)に示すように、下方への移動がストッパー402bによって制限される。
A
基板支持部材402の上端には、ウェハWが載置される支持ピン479と、ウェハWの周端部に当接する基板把持部としての円筒状のクランプ480とが設けられている。支持ピン479は基板支持部材402の軸心上に配置されており、クランプ480は基板支持部材402の軸心から離間した位置に配置されている。したがって、クランプ480は、基板支持部材402の回転に伴って基板支持部材402の軸心周りに回転可能となっている。ここで、ウェハWと接触する部分の部材としては、帯電防止のために、導電性部材(好適には、鉄、アルミニウム、SUS)や、PEEK、PVC等の炭素樹脂を使用することが好ましい。
At the upper end of the
基台401の保持部401bには第1の磁石481が取り付けられており、この第1の磁石481は基板支持部材402の側面に対向して配置されている。一方、基板支持部材402には第2の磁石482および第3の磁石483が配置されている。これら第2の磁石482および第3の磁石483は、上下方向に離間して配列されている。これらの第1〜第3の磁石481,482,483としては、ネオジム磁石が好適に用いられる。
A
図37は、第2の磁石482と第3の磁石483の配置を説明するための模式図であり、基板支持部材402の軸方向から見た図である。図37に示すように、第2の磁石482と第3の磁石483とは、基板支持部材402の周方向においてずれて配置されている。すなわち、第2の磁石482と基板支持部材402との中心とを結ぶ線と、第2の磁石482と基板支持部材402の中心とを結ぶ線とは、基板支持部材402の軸方向から見たときに所定の角度αで交わっている。
FIG. 37 is a schematic diagram for explaining the arrangement of the
基板支持部材402が、図36(b)に示す下降位置にあるとき、第1の磁石481と第2の磁石482とが互いに対向する。このとき、第1の磁石481と第2の磁石482との間には吸引力が働く。この吸引力は、基板支持部材402にその軸心周りに回転する力を与え、その回転方向は、クランプ480がウェハWの周端部を押圧する方向である。したがって、図36(b)に示す下降位置は、ウェハWを把持するクランプ位置ということができる。
When the
なお、第1の磁石481と第2の磁石482とは、十分な把持力が発生する程度に互いに近接してさえいれば、ウェハWを把持するときに必ずしも互いに対向していなくてもよい。例えば、第1の磁石481と第2の磁石482とが互いに傾いた状態で近接している場合でも、それらの間に磁力は発生する。したがって、この磁力が基板支持部材402を回転させてウェハWを把持させるのに十分な程度に大きければ、第1の磁石481と第2の磁石482は必ずしも互いに対向していなくてもよい。
Note that the
図38(a)は、リフト機構470により基板支持部材402を上昇させたときの基板支持部材402およびアーム401aの一部を示す平面図であり、図38(b)は、リフト機構470により基板支持部材402を上昇させたときの図35のA−A線断面図であり、図38(c)は図38(b)のC−C線断面図である。
リフト機構470により基板保持部材402を図38(b)に示す上昇位置まで上昇させると、第1の磁石481と第3の磁石483とが対向し、第2の磁石482は第1の磁石481から離間する。このとき、第1の磁石481と第3の磁石483との間には吸引力が働く。この吸引力は基板支持部材402にその軸心周りに回転する力を与え、その回転方向は、クランプ480がウェハWから離間する方向である。したがって、図38(a)に示す上昇位置は、基板をリリースするアンクランプ位置ということができる。この場合も、第1の磁石481と第3の磁石483とは、ウェハWの把持を開放するときに必ずしも互いに対向していなくてよく、クランプ480をウェハWから離間させる方向に基板支持部材402を回転させる程度の回転力(磁力)を発生する程度に互いに近接していればよい。
38A is a plan view showing a part of the
When the
第2の磁石482と第3の磁石483とは基板支持部材402の周方向においてずれた位置に配置されているので、基板支持部材402の上下移動に伴って基板支持部材402には回転力が作用する。この回転力によってクランプ480にウェハWを把持する力とウェハWを開放する力が与えられる。したがって、基板支持部材402を上下させるだけで、ウェハWを把持し、かつ開放することができる。このように、第1の磁石481、第2の磁石482、および第3の磁石483は、基板支持部材402をその軸心周りに回転させてクランプ480によりウェハWを把持させる把持機構(回転機構)として機能する。この把持機構(回転機構)は、基板支持部材402の上下動によって動作する。
Since the
リフト機構470の接触プレート470aは基板支持部材402の下方に位置している。接触プレート470aが上昇すると、接触プレート470aの上面が基板支持部材402の下端に接触し、基板支持部材402はスプリング478の押圧力に抗して接触プレート470aによって持ち上げられる。接触プレート470aの上面は平坦な面であり、一方、基板支持部材402の下端は半球状に形成されている。本実施形態では、リフト機構470とスプリング478とにより、基板支持部材402を上下動させる駆動機構が構成される。なお、駆動機構としては、上述の実施形態に限らず、例えば、サーボモータを用いた構成とすることもできる。
The
基板支持部材402の側面には、その軸心に沿って延びる溝484が形成されている。この溝484は円弧状の水平断面を有している。基台401のアーム401a(本実施形態では保持部401b)には、溝484に向かって突起する突起部485が形成されている。この突起部485の先端は、溝484の内部に位置しており、突起部485は溝484に緩やかに係合している。この溝484および突起部485は、基板支持部材402の回転角度を制限するために設けられている。
A
図39は、ノズル460にIPA蒸気(イソプロピルアルコールとN2ガスとの混合気)を供給するIPA供給ユニットを示す模式図である。このIPA供給ユニットは、基板処理装置内に設置されている。図39に示すように、IPA供給ユニットは、ステンレスなどの金属から構成されるバブリングタンク501を備えている。このバブリングタンク501の内部の底には、N2ガスのバブルを発生するバブラー502が配置されている。バブラー502はN2ガスバブリングライン503に接続され、さらにこのN2ガスバブリングライン503はN2ガス導入ライン504に接続されている。N2ガス導入ライン504はN2ガス供給源505に接続されている。N2ガス導入ライン504およびN2ガスバブリングライン503には、それぞれ調整弁514,515が設けられている。
FIG. 39 is a schematic diagram showing an IPA supply unit that supplies IPA vapor (a mixture of isopropyl alcohol and N 2 gas) to the
N2ガスバブリングライン503にはマスフローコントローラ520およびフィルタ521が設けられている。N2ガスは、N2ガス供給源505から、N2ガス導入ライン504、N2ガスバブリングライン503、およびフィルタ521を通じてバブラー502に供給される。N2ガスはマスフローコントローラ520により一定の流量に維持されるようになっている。N2ガスのバブラー502への好ましい供給流量は0〜10SLM程度である。なお、単位SLMは、Standard Litter per Minuteの略語であり、0℃で1atmのときのガスの流量を表す単位である。
The N 2
バブリングタンク501には、さらにIPA液供給ライン506およびIPA蒸気移送ライン507が接続されている。IPA蒸気移送ライン507は、フィルタ522を介して、上側乾燥モジュール205Aおよび下側乾燥モジュール205Bのノズル460(図33参照)に接続されている。IPA液供給ライン506はIPA供給源508に接続されており、液状のIPA(イソプロピルアルコール)がIPA液供給ライン506を通じてバブリングタンク501に供給される。バブリングタンク501内には、バブリングタンク501内のIPA液の液面を検知する液面センサ(図示せず)が設置されている。IPA液供給ライン506には調整弁516が設けられており、液面センサの出力信号(すなわち、IPA液の液面位置)が所定の範囲内に収まるように、調整弁516によってIPA液の供給流量が調整される。例えば、バブリングタンク501内には、200mL〜700mLのIPA液が蓄えられる。
An IPA
通常、連続してバブリングを行うと、IPAの蒸発熱(気化熱)によりバブリングタンク501内のIPA液の温度が低下する。IPA液の温度が低下すると、IPA蒸気の濃度が低下してしまい、ウェハの安定した乾燥が困難となる。そこで、IPA液の温度を一定に保つために、バブリングタンク501の周囲にはウォータージャケット510が設けられている。このウォータージャケット510には保温水が流通しており、これによりバブリングタンク501内に貯留されているIPA液の温度が一定に保たれる。保温水はウォータージャケット510の下部に設けられた入口からウォータージャケット510内に流入し、ウォータージャケット510の上部に設けられた出口から流出する。ウォータージャケット510を流れる保温水の好ましい流量は、50mL/min〜200mL/minであり、保温水の好ましい温度は22〜25℃である。本実施形態では、保温水としてDIW(超純水)が用いられているが、他の媒体を用いてもよい。
Normally, when bubbling is continuously performed, the temperature of the IPA liquid in the bubbling
IPA液中でのN2ガスのバブリングによりIPA蒸気が発生し、バブリングタンク501内の上部空間にIPA蒸気が溜まる。このIPA蒸気は、IPA蒸気移送ライン507およびフィルタ522を通じて上側乾燥モジュール205Aおよび下側乾燥モジュール205Bのノズル460(図33参照)に送られる。フィルタ522を通過することによって、ウェハに供給されるIPA蒸気は清浄に保たれている。IPA蒸気の好ましい温度は18〜25℃である。これは、ウェハに熱ストレスを与えないためである。
IPA vapor is generated by bubbling N 2 gas in the IPA liquid, and IPA vapor is accumulated in the upper space in the bubbling
バブリングタンク501内で発生するIPA蒸気の好ましい濃度は、0〜4vol%程度である。保温水自体の温度を高めると、バブリングタンク501内のIPA液の温度が上昇し、気化するIPAの濃度が高まる。したがって、保温水の温度によって、IPA蒸気の濃度を調整することができる。保温水を用いたIPA液の加温の利点としては、ヒータなどの電気的熱発生源を設ける必要がなく、基板処理装置の安全を確保できるという点が挙げられる。
A preferable concentration of the IPA vapor generated in the bubbling
N2ガス導入ライン504とIPA蒸気移送ライン507とを連結するバイパスラインとして、N2希釈ライン525が設けられている。このN2希釈ライン525には、マスフローコントローラ527、調整弁528、および逆止弁529が設けられている。N2ガスをN2希釈ライン525を経由してIPA蒸気移送ライン507に直接移送することにより、IPA蒸気をN2ガスによって希釈することができる。IPA蒸気移送ライン507に移送されるN2ガスの流量はマスフローコントローラ527によって制御される。
As a bypass line for connecting the N 2
バブリングタンク501の上部には、IPAリリーフライン530が接続されている。このIPAリリーフライン530には、調整弁532、逆止弁533、およびリリース弁534が設けられている。調整弁532とリリース弁534とは並列に配列されている。バブリングタンク501内の圧力がある値を超えると、リリース弁534が開き、バブリングタンク501内のIPA蒸気が外部に放出されるようになっている。また、バブリングタンク501へのIPA補充時には、調整弁532が開き、バブリングタンク501内圧力が大気圧となる。なお、調整弁515,528は、閉止弁とすることもできる。この場合は、マスフローコントローラ520,527によりN2ガスの流量が調整され、一方で、閉止弁515,528によりN2ガスのフローが遮断される。
An
次に、上述のように構成された乾燥モジュール205Aの動作について説明する。
まず、モータ415によりウェハWおよび回転カバー450を一体に回転させる。この状態で、フロントノズル454およびバックノズル463から純水をウェハWの表面(上面)および裏面(下面)に供給し、ウェハWの全面を純水でリンスする。ウェハWに供給された純水は、遠心力によりウェハWの表面および裏面全体に広がり、これによりウェハWの全体がリンスされる。回転するウェハWから振り落とされた純水は、回転カバー450に捕らえられ、液体排出孔451に流れ込む。ウェハWのリンス処理の間、2つのノズル460,461は、ウェハWから離れた所定の待機位置にある。
Next, the operation of the
First, the
次に、フロントノズル454からの純水の供給を停止し、フロントノズル454をウェハWから離れた所定の待機位置に移動させるとともに、2つのノズル460,461をウェハWの上方の作業位置に移動させる。そして、ウェハWを30〜150min−1の速度で低速回転させながら、ノズル460からIPA蒸気を、ノズル461から純水をウェハWの表面に向かって供給する。このとき、ウェハWの裏面にもバックノズル463から純水を供給する。そして、2つのノズル460,461を同時にウェハWの径方向に沿って移動させる。これにより、ウェハWの表面(上面)が乾燥される。
Next, the supply of pure water from the
その後、2つのノズル460,461を所定の待機位置に移動させ、バックノズル463からの純水の供給を停止する。そして、ウェハWを1000〜1500min−1の速度で高速回転させ、ウェハWの裏面に付着している純水を振り落とす。このとき、ガスノズル464から乾燥気体をウェハWの裏面に吹き付ける。このようにしてウェハWの裏面が乾燥される。乾燥されたウェハWは、図1に示す搬送ロボット22により乾燥モジュール205Aから取り出され、ウェハカセットに戻される。このようにして、研磨、洗浄、および乾燥を含む一連の処理がウェハに対して行われる。上述のように構成された乾燥モジュール205Aによれば、ウェハWの両面を迅速かつ効果的に乾燥することができ、また、正確に乾燥処理の終了時点を制御することができる。したがって、乾燥処理のための処理時間が洗浄プロセス全体の律速工程となることはない。また、洗浄部4に形成される上述した複数の洗浄ラインでの処理時間は平準化することができるので、プロセス全体のスループットを向上させることができる。
Thereafter, the two
上述した実施形態は、本発明が属する技術分野における通常の知識を有する者が本発明を実施できることを目的として記載されたものである。上記実施形態の種々の変形例は、当業者であれば当然になしうることであり、本発明の技術的思想は他の実施形態にも適用しうることである。したがって、本発明は、記載された実施形態に限定されることはなく、特許請求の範囲によって定義される技術的思想に従った最も広い範囲とすべきである。 The embodiment described above is described for the purpose of enabling the person having ordinary knowledge in the technical field to which the present invention belongs to implement the present invention. Various modifications of the above embodiment can be naturally made by those skilled in the art, and the technical idea of the present invention can be applied to other embodiments. Therefore, the present invention should not be limited to the described embodiments, but should be the widest scope according to the technical idea defined by the claims.
1 ハウジング
2 ロード/アンロード部
3 研磨部
3A,3B,3C,3D 研磨ユニット
4 洗浄部
5 制御部
6 第1リニアトランスポータ
7 第2リニアトランスポータ
10 研磨パッド
11 リフタ
12 スイングトランスポータ
20 フロントロード部
21 走行機構
22 搬送ロボット
30A,30B,30C,30D 研磨テーブル
31A,31B,31C,31D トップリング
32A,32B,32C,32D 研磨液供給ノズル
33A,33B,33C,33D ドレッサ
34A,34B,34C,34D アトマイザ
36 トップリングシャフト
40 リテーナリング
42 弾性パッド
51〜56 流体路
60 トップリングヘッド
65 エアシリンダ
67 支持軸
72 軸受
75 圧力調整部
85 ドレッサアーム
86 ドレッシング部材
88 揺動軸
90 アーム
94 揺動軸
100 チューブ
101 パイプアーム
102 揺動軸
110,112 純水供給管
113 分配制御部
121〜127 第1〜第7搬送ハンド
121a〜127a 搬送ステージ
130A〜130C 昇降駆動機構
132A〜132C リニアガイド
134A〜134C 水平駆動機構
142 エアシリンダ
143 リテーナリングステーション
149 摩耗測定器
150 載置ステージ
151 サポートアーム
152 昇降駆動機構
162 スイング機構
165 昇降駆動機構
167 反転機構
170 把持機構
180 仮置き台
190 第1洗浄室
191 第1搬送室
192 第2洗浄室
193 第2搬送室
194 乾燥室
201A,201B 一次洗浄モジュール
202A,202B 二次洗浄モジュール
203 仮置き台
205A,205B 乾燥モジュール
209 第1搬送ロボット
210 第2搬送ロボット
301〜304 ローラ
307,308 ロールスポンジ
321 昇降駆動機構
401 基台
402 基板支持部材
415 モータ
450 回転カバー
454 フロントノズル
460,461 ノズル
463 バックノズル
464 ガスノズル
470 リフト機構
481,482,483 磁石
501 バブリングタンク
502 バブラー
510 ウォータージャケット
DESCRIPTION OF SYMBOLS 1
4 Cleaning unit 5 Control unit 6 First linear transporter 7 Second linear transporter 10 Polishing pad 11 Lifter 12 Swing transporter 20 Front load unit 21 Traveling mechanism 22 Transfer robots 30A, 30B, 30C, 30D Polishing tables 31A, 31B, 31C, 31D Top ring 32A, 32B, 32C, 32D Polishing liquid supply nozzle 33A, 33B, 33C, 33D Dresser 34A, 34B, 34C, 34D Atomizer 36 Top ring shaft 40 Retainer ring 42 Elastic pad 51-56 Fluid path 60 Top ring Head 65 Air cylinder 67 Support shaft 72 Bearing 75 Pressure adjusting portion 85 Dresser arm 86 Dressing member 88 Oscillating shaft 90 Arm 94 Oscillating shaft 100 Tube 101 Pipe arm 102 Oscillating shafts 110 and 112 Water supply pipe 113 Distribution control unit 121-127 First to seventh transport hands 121a-127a Transport stages 130A-130C Lifting drive mechanisms 132A-132C Linear guides 134A-134C Horizontal drive mechanism 142 Air cylinder 143 Retainer ring station 149 Wear measuring device 150 Placement stage 151 Support arm 152 Elevating drive mechanism 162 Swing mechanism 165 Elevating drive mechanism 167 Reversing mechanism 170 Grip mechanism 180 Temporary placing table 190 First cleaning chamber 191 First transfer chamber 192 Second cleaning chamber 193 Second transfer chamber 194 Drying Chamber 201A, 201B Primary cleaning module 202A, 202B Secondary cleaning module 203 Temporary placing table 205A, 205B Drying module 209 First transport robot 210 Second transport robot 301-304 Rollers 307, 3 08 Roll sponge 321 Lifting drive mechanism 401 Base 402 Substrate support member 415 Motor 450 Rotating cover 454 Front nozzle 460,461 Nozzle 463 Back nozzle 464 Gas nozzle 470 Lift mechanism 481,482,483 Magnet 501 Bubbling tank 502 Bubbler 510 Water jacket
Claims (8)
複数の基板を連続的に搬送する搬送機構と、
研磨された基板を洗浄し乾燥する洗浄部とを備えた基板処理装置であって、
前記洗浄部は、複数の基板を並列に洗浄するための複数の並列した洗浄ラインと、前記搬送機構によって連続的に搬送される複数の基板を前記複数の並列した洗浄ラインのいずれかに振り分ける第1搬送ロボットおよび第2搬送ロボットとを有し、
前記複数の並列した洗浄ラインは、基板を一次洗浄するための複数の一次洗浄モジュールと、基板を二次洗浄するための複数の二次洗浄モジュールを有しており、前記一次洗浄モジュールおよび前記二次洗浄モジュールは、それぞれ縦方向に沿って配列されており、
前記第1搬送ロボットは、縦方向に延びる第1の支持軸に沿って上下に移動して前記複数の一次洗浄モジュールおよび前記複数の二次洗浄モジュールにアクセス可能となっており、
前記第2搬送ロボットは、縦方向に延びる第2の支持軸に沿って上下に移動して前記複数の二次洗浄モジュールにアクセス可能となっており、
前記基板処理装置は、
前記一次洗浄モジュールおよび前記二次洗浄モジュールの故障を検知する検知器と、
前記検知器が前記一次洗浄モジュールおよび前記二次洗浄モジュールのうちのいずれかの故障を検知したとき、該故障した洗浄モジュールを回避する洗浄ラインを選定し、該選定された洗浄ラインに切り替える制御部をさらに備え、
前記複数の一次洗浄モジュールのうちのいずれかが基板を洗浄中であるか、または故障している場合は、前記制御部は、前記複数の一次洗浄モジュールのうち基板の洗浄を行っていない、または故障していない一次洗浄モジュールに基板を搬送するよう前記第1搬送ロボットを制御することを特徴とする基板処理装置。 A polishing section having a plurality of polishing units that respectively polish a plurality of substrates;
A transport mechanism for continuously transporting a plurality of substrates;
A substrate processing apparatus comprising a cleaning unit for cleaning and drying a polished substrate,
The cleaning unit includes a first distributes a plurality of juxtaposed washing line for cleaning a plurality of substrates in parallel, a plurality of substrates that are continuously conveyed by the conveying mechanism to one of said plurality of juxtaposed washing line Having 1 transfer robot and 2nd transfer robot,
The plurality of parallel cleaning lines include a plurality of primary cleaning modules for primary cleaning of the substrate and a plurality of secondary cleaning modules for secondary cleaning of the substrate. The next cleaning modules are arranged along the vertical direction,
The first transport robot moves up and down along a first support shaft extending in the vertical direction, and can access the plurality of primary cleaning modules and the plurality of secondary cleaning modules.
The second transfer robot moves up and down along a second support shaft extending in the vertical direction, and can access the plurality of secondary cleaning modules.
The substrate processing apparatus includes:
A detector for detecting a failure of the primary cleaning module and the secondary cleaning module;
When the detector detects a failure of any of the primary cleaning module and the secondary cleaning module, a control unit that selects a cleaning line that avoids the failed cleaning module and switches to the selected cleaning line further comprising a,
If any of the plurality of primary cleaning modules is cleaning the substrate or has failed, the control unit is not cleaning the substrate among the plurality of primary cleaning modules, or A substrate processing apparatus, wherein the first transfer robot is controlled to transfer a substrate to a primary cleaning module that is not faulty .
研磨された複数の基板を、複数の一次洗浄モジュールおよび複数の二次洗浄モジュールから構成される複数の並列した洗浄ラインに連続的に搬送し、前記一次洗浄モジュールおよび前記二次洗浄モジュールは、それぞれ縦方向に沿って配列されており、前記複数の一次洗浄モジュールから前記複数の二次洗浄モジュールへの基板の搬送は、上下動可能な第1搬送ロボットによって行われ、前記複数の二次洗浄モジュールからの基板の搬出は、上下動可能な第2搬送ロボットによって行われ、
前記複数の基板を、前記第1搬送ロボットおよび第2搬送ロボットによってそれぞれ前記複数の並列した洗浄ラインのいずれかに振り分け、
前記複数の並列した洗浄ラインで前記複数の基板を並列に洗浄し、
洗浄された前記複数の基板を乾燥し、
前記一次洗浄モジュールおよび前記二次洗浄モジュールのうちのいずれかが故障したときは、該故障した洗浄モジュールを回避する洗浄ラインを選定し、
前記選定された洗浄ラインに切り替え、
前記複数の一次洗浄モジュールのうちのいずれかが基板を洗浄中であるか、または故障している場合は、前記複数の一次洗浄モジュールのうち基板の洗浄を行っていない、または故障していない一次洗浄モジュールに基板を搬送することを特徴とする基板処理方法。 Polishing multiple substrates,
A plurality of polished substrates are continuously conveyed to a plurality of parallel cleaning lines composed of a plurality of primary cleaning modules and a plurality of secondary cleaning modules, and the primary cleaning module and the secondary cleaning module are respectively The substrates are arranged along the vertical direction, and the transfer of the substrate from the plurality of primary cleaning modules to the plurality of secondary cleaning modules is performed by a first transfer robot that can move up and down, and the plurality of secondary cleaning modules The substrate is unloaded from the second transfer robot that can move up and down.
Distributing the plurality of substrates to any of the plurality of parallel cleaning lines by the first transfer robot and the second transfer robot,
Cleaning the plurality of substrates in parallel in the plurality of parallel cleaning lines;
Drying the plurality of cleaned substrates;
When one of the primary cleaning module and the secondary cleaning module fails, a cleaning line that avoids the failed cleaning module is selected,
Switch to the selected cleaning line ,
If any of the plurality of primary cleaning modules is cleaning the substrate or has failed, the primary cleaning module of the plurality of primary cleaning modules has not been cleaned or has not failed. A substrate processing method comprising transporting a substrate to a cleaning module .
Priority Applications (13)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009108671A JP5744382B2 (en) | 2008-07-24 | 2009-04-28 | Substrate processing apparatus and substrate processing method |
| US12/457,175 US8795032B2 (en) | 2008-06-04 | 2009-06-03 | Substrate processing apparatus, substrate processing method, substrate holding mechanism, and substrate holding method |
| KR1020090049190A KR101958874B1 (en) | 2008-06-04 | 2009-06-03 | Substrate processing apparatus, substrate processing method, substrate holding mechanism, and substrate holding method |
| CN200910141394.1A CN101599423B (en) | 2008-06-04 | 2009-06-04 | Substrate processing apparatus, substrate processing method, substrate holding mechanism, and substrate holding method |
| EP20090007434 EP2131387A3 (en) | 2008-06-04 | 2009-06-04 | Substrate processing apparatus, substrate processing method, substrate holding mechanism, and substrate holding method |
| CN201410084660.2A CN103839857B (en) | 2008-06-04 | 2009-06-04 | Substrate board treatment and method, substrate grasping mechanism and substrate grasping method |
| TW103145187A TWI550705B (en) | 2008-06-04 | 2009-06-04 | Polishing apparatus and polishing method |
| TW098118507A TWI550760B (en) | 2008-06-04 | 2009-06-04 | Substrate processing apparatus, substrate processing method, substrate hodlding mechanism, and substrate holding method |
| US14/309,152 US9358662B2 (en) | 2008-06-04 | 2014-06-19 | Substrate processing apparatus, substrate processing method, substrate holding mechanism, and substrate holding method |
| US14/530,589 US9687957B2 (en) | 2008-06-04 | 2014-10-31 | Substrate processing apparatus, substrate processing method, substrate holding mechanism, and substrate holding method |
| KR1020160042031A KR101725268B1 (en) | 2008-06-04 | 2016-04-06 | Substrate processing apparatus, substrate processing method, substrate holding mechanism, and substrate holding method |
| US15/601,575 US10486285B2 (en) | 2008-06-04 | 2017-05-22 | Substrate processing apparatus, substrate processing method, substrate holding mechanism, and substrate holding method |
| US16/657,901 US11426834B2 (en) | 2008-06-04 | 2019-10-18 | Substrate processing apparatus, substrate processing method, substrate holding mechanism, and substrate holding method |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008190834 | 2008-07-24 | ||
| JP2008190834 | 2008-07-24 | ||
| JP2009108671A JP5744382B2 (en) | 2008-07-24 | 2009-04-28 | Substrate processing apparatus and substrate processing method |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012080426A Division JP5518121B2 (en) | 2008-07-24 | 2012-03-30 | Substrate processing apparatus and substrate processing method |
| JP2014259713A Division JP6010100B2 (en) | 2008-07-24 | 2014-12-24 | Substrate processing apparatus and substrate processing method |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010050436A JP2010050436A (en) | 2010-03-04 |
| JP2010050436A5 JP2010050436A5 (en) | 2012-05-24 |
| JP5744382B2 true JP5744382B2 (en) | 2015-07-08 |
Family
ID=42067251
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009108671A Active JP5744382B2 (en) | 2008-06-04 | 2009-04-28 | Substrate processing apparatus and substrate processing method |
| JP2012080426A Active JP5518121B2 (en) | 2008-07-24 | 2012-03-30 | Substrate processing apparatus and substrate processing method |
| JP2014259713A Active JP6010100B2 (en) | 2008-07-24 | 2014-12-24 | Substrate processing apparatus and substrate processing method |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012080426A Active JP5518121B2 (en) | 2008-07-24 | 2012-03-30 | Substrate processing apparatus and substrate processing method |
| JP2014259713A Active JP6010100B2 (en) | 2008-07-24 | 2014-12-24 | Substrate processing apparatus and substrate processing method |
Country Status (1)
| Country | Link |
|---|---|
| JP (3) | JP5744382B2 (en) |
Families Citing this family (58)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9153464B2 (en) * | 2011-05-31 | 2015-10-06 | Semes Co., Ltd. | Substrate processing apparatus and substrate processing method |
| KR101295791B1 (en) * | 2011-05-31 | 2013-08-09 | 세메스 주식회사 | substrate processing apparatus and substrate processing method |
| JP5689367B2 (en) * | 2011-06-01 | 2015-03-25 | 株式会社荏原製作所 | Substrate transport method and substrate transport machine |
| US9530676B2 (en) | 2011-06-01 | 2016-12-27 | Ebara Corporation | Substrate processing apparatus, substrate transfer method and substrate transfer device |
| JP5712061B2 (en) * | 2011-06-16 | 2015-05-07 | 株式会社荏原製作所 | Substrate processing method and substrate processing unit |
| JP5922965B2 (en) * | 2012-03-29 | 2016-05-24 | 株式会社荏原製作所 | Substrate holding apparatus, polishing apparatus, and polishing method |
| TWI674171B (en) | 2012-01-31 | 2019-10-11 | 日商荏原製作所股份有限公司 | Substrate holding device, polishing device, and polishing method |
| CN103240244A (en) * | 2012-02-02 | 2013-08-14 | 林进诚 | Surface cleaning device and surface cleaning method |
| JP5866227B2 (en) * | 2012-02-23 | 2016-02-17 | 株式会社荏原製作所 | Substrate cleaning method |
| CN103367105B (en) * | 2012-03-26 | 2016-08-10 | 上海华虹宏力半导体制造有限公司 | A kind of form of a stroke or a combination of strokes sponge fixing device |
| JP5941763B2 (en) | 2012-06-15 | 2016-06-29 | 株式会社荏原製作所 | Polishing method |
| JP5905359B2 (en) | 2012-07-23 | 2016-04-20 | 株式会社荏原製作所 | Pressure control apparatus and polishing apparatus provided with the pressure control apparatus |
| JP6055648B2 (en) * | 2012-10-26 | 2016-12-27 | 株式会社荏原製作所 | Polishing apparatus and polishing method |
| JP6031426B2 (en) * | 2012-11-02 | 2016-11-24 | 株式会社荏原製作所 | Polishing apparatus and polishing method |
| JP6053528B2 (en) * | 2013-01-11 | 2016-12-27 | 株式会社荏原製作所 | Substrate gripping device |
| JP6009959B2 (en) * | 2013-02-06 | 2016-10-19 | 株式会社荏原製作所 | Liquid flow control device used in polishing equipment |
| WO2015030050A1 (en) * | 2013-08-27 | 2015-03-05 | 株式会社荏原製作所 | Polishing method |
| JP6140051B2 (en) * | 2013-10-23 | 2017-05-31 | 株式会社荏原製作所 | Polishing method and polishing apparatus |
| US9662761B2 (en) | 2013-12-02 | 2017-05-30 | Ebara Corporation | Polishing apparatus |
| JP6092086B2 (en) * | 2013-12-02 | 2017-03-08 | 株式会社荏原製作所 | Polishing equipment |
| JP6085572B2 (en) | 2014-01-09 | 2017-02-22 | 株式会社荏原製作所 | Pressure control apparatus and polishing apparatus provided with the pressure control apparatus |
| KR101610003B1 (en) * | 2014-03-03 | 2016-04-07 | 주식회사 케이씨텍 | Chamber structure of substrate cleaning apparatus |
| JP2015188955A (en) | 2014-03-27 | 2015-11-02 | 株式会社荏原製作所 | Polishing device |
| JP6159282B2 (en) | 2014-03-27 | 2017-07-05 | 株式会社荏原製作所 | Substrate processing apparatus and piping cleaning method for substrate processing apparatus |
| JP6336893B2 (en) * | 2014-11-11 | 2018-06-06 | 株式会社荏原製作所 | Polishing equipment |
| TWI658899B (en) | 2014-03-31 | 2019-05-11 | 日商荏原製作所股份有限公司 | Polishing apparatus and polishing method |
| JP2015193065A (en) * | 2014-03-31 | 2015-11-05 | 株式会社荏原製作所 | Polishing device and polishing method |
| KR102213468B1 (en) | 2014-08-26 | 2021-02-08 | 가부시키가이샤 에바라 세이사꾸쇼 | Buffing apparatus, and substrate processing apparatus |
| SG10201810852TA (en) | 2014-10-03 | 2019-01-30 | Ebara Corp | Substrate processing apparatus and processing method |
| SG10201508329UA (en) | 2014-10-10 | 2016-05-30 | Ebara Corp | Buffing apparatus and substrate processing apparatus |
| JP6335103B2 (en) * | 2014-11-14 | 2018-05-30 | 株式会社荏原製作所 | Substrate holding device |
| JP6313196B2 (en) | 2014-11-20 | 2018-04-18 | 株式会社荏原製作所 | Polishing surface cleaning apparatus, polishing apparatus, and manufacturing method of polishing surface cleaning apparatus |
| JP6486757B2 (en) | 2015-04-23 | 2019-03-20 | 株式会社荏原製作所 | Substrate processing equipment |
| JP6462559B2 (en) * | 2015-05-15 | 2019-01-30 | 東京エレクトロン株式会社 | Substrate processing equipment |
| US10553421B2 (en) * | 2015-05-15 | 2020-02-04 | Tokyo Electron Limited | Substrate processing apparatus, substrate processing method and storage medium |
| KR102346786B1 (en) * | 2015-07-03 | 2022-01-04 | 주식회사 케이씨텍 | Apparatus of loading wafeer in chemical mechanical polishing system |
| JP6721967B2 (en) | 2015-11-17 | 2020-07-15 | 株式会社荏原製作所 | Buff processing device and substrate processing device |
| JP6723055B2 (en) | 2016-04-04 | 2020-07-15 | 株式会社荏原製作所 | Substrate processing apparatus and method for confirming presence/absence of substrate |
| JP6727044B2 (en) * | 2016-06-30 | 2020-07-22 | 株式会社荏原製作所 | Substrate processing equipment |
| JP6987184B2 (en) * | 2016-06-30 | 2021-12-22 | 株式会社荏原製作所 | Board processing equipment |
| JP6717691B2 (en) | 2016-07-06 | 2020-07-01 | 株式会社荏原製作所 | Substrate processing equipment |
| JP6895341B2 (en) | 2017-08-10 | 2021-06-30 | 株式会社荏原製作所 | Board processing equipment |
| JP6499330B2 (en) * | 2018-01-05 | 2019-04-10 | 株式会社荏原製作所 | Polishing apparatus and polishing method |
| WO2020003995A1 (en) * | 2018-06-26 | 2020-01-02 | 東京エレクトロン株式会社 | Machining device, machining method, and computer storage medium |
| JP7160725B2 (en) | 2019-03-06 | 2022-10-25 | 株式会社荏原製作所 | Substrate processing equipment |
| JP7143251B2 (en) | 2019-05-30 | 2022-09-28 | 株式会社荏原製作所 | Damper control system and damper control method |
| JP7138602B2 (en) | 2019-06-20 | 2022-09-16 | 株式会社荏原製作所 | Liquid draining method for liquid supply device, liquid supply device |
| SG10202006423VA (en) | 2019-07-12 | 2021-02-25 | Ebara Corp | Substrate processing apparatus and storage medium |
| JP2021013987A (en) * | 2019-07-12 | 2021-02-12 | 株式会社荏原製作所 | Substrate processing system and recording medium |
| US11948811B2 (en) | 2019-12-26 | 2024-04-02 | Ebara Corporation | Cleaning apparatus and polishing apparatus |
| US20230230857A1 (en) | 2020-06-09 | 2023-07-20 | Ebara Corporation | Substrate processing apparatus, computer-readable storage medium storing a program, and substrate processing method |
| JP7394821B2 (en) * | 2020-06-30 | 2023-12-08 | 株式会社荏原製作所 | Substrate processing equipment |
| JP2023006718A (en) | 2021-06-30 | 2023-01-18 | 株式会社荏原製作所 | Transfer device and substrate processing device |
| JP2023046631A (en) * | 2021-09-24 | 2023-04-05 | 株式会社Screenホールディングス | Substrate treatment device |
| KR20230051753A (en) | 2021-10-11 | 2023-04-18 | 가부시키가이샤 에바라 세이사꾸쇼 | Hand, conveying device, and substrate processing apparatus |
| JP2023074598A (en) | 2021-11-18 | 2023-05-30 | 株式会社荏原製作所 | Substrate processing method and substrate processing apparatus |
| CN115476237B (en) * | 2022-09-30 | 2024-03-08 | 浙江海纳半导体股份有限公司 | Automatic turn-over grinding equipment for monocrystalline silicon piece |
| KR20240159489A (en) | 2023-04-28 | 2024-11-05 | 가부시키가이샤 에바라 세이사꾸쇼 | Substrate processing apparatus |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1050794A (en) * | 1996-08-01 | 1998-02-20 | Dainippon Screen Mfg Co Ltd | Apparatus and method for processing substrate |
| JPH10113863A (en) * | 1996-10-11 | 1998-05-06 | Sony Corp | Method and device for positioning guide device for polishing and method for polishing thin plate-like substrate |
| JP3735175B2 (en) * | 1997-03-04 | 2006-01-18 | 大日本スクリーン製造株式会社 | Substrate processing equipment |
| JPH1116983A (en) * | 1997-06-24 | 1999-01-22 | Dainippon Screen Mfg Co Ltd | Substrate treatment device and carrying control method in substrate treatment device |
| JP3934745B2 (en) * | 1997-06-30 | 2007-06-20 | 住友精密工業株式会社 | Substrate transfer unit and wet processing apparatus using the same |
| JP4127346B2 (en) * | 1999-08-20 | 2008-07-30 | 株式会社荏原製作所 | Polishing apparatus and method |
| WO2001084621A1 (en) * | 2000-04-27 | 2001-11-08 | Ebara Corporation | Rotation holding device and semiconductor substrate processing device |
| JP3916846B2 (en) * | 2000-05-26 | 2007-05-23 | 株式会社荏原製作所 | Substrate polishing apparatus and substrate polishing method |
| JP2002110609A (en) * | 2000-10-02 | 2002-04-12 | Tokyo Electron Ltd | Cleaning apparatus |
| JP2003051481A (en) * | 2001-08-07 | 2003-02-21 | Hitachi Ltd | Manufacturing method for semiconductor integrated circuit device |
| WO2004095516A2 (en) * | 2003-04-21 | 2004-11-04 | Inopla Inc. | Apparatus and method for polishing semiconductor wafers using one or more polishing surfaces |
| JP4342921B2 (en) * | 2003-12-09 | 2009-10-14 | 東京エレクトロン株式会社 | Substrate processing apparatus control method and substrate processing apparatus |
| US7290976B2 (en) * | 2005-06-28 | 2007-11-06 | Applied Materials, Inc. | Semiconductor substrate processing apparatus with a passive substrate gripper |
| JP4682855B2 (en) * | 2006-01-30 | 2011-05-11 | 日本電気株式会社 | System, method, program, and mail receiver for preventing unauthorized site guidance |
| JP2008042099A (en) * | 2006-08-09 | 2008-02-21 | Tokyo Seimitsu Co Ltd | Cleaning device |
| JP4744426B2 (en) * | 2006-12-27 | 2011-08-10 | 大日本スクリーン製造株式会社 | Substrate processing apparatus and substrate processing method |
| JP4660494B2 (en) * | 2007-02-15 | 2011-03-30 | 株式会社荏原製作所 | Polishing cartridge |
-
2009
- 2009-04-28 JP JP2009108671A patent/JP5744382B2/en active Active
-
2012
- 2012-03-30 JP JP2012080426A patent/JP5518121B2/en active Active
-
2014
- 2014-12-24 JP JP2014259713A patent/JP6010100B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015065478A (en) | 2015-04-09 |
| JP5518121B2 (en) | 2014-06-11 |
| JP2010050436A (en) | 2010-03-04 |
| JP2012129559A (en) | 2012-07-05 |
| JP6010100B2 (en) | 2016-10-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6010100B2 (en) | Substrate processing apparatus and substrate processing method | |
| US11426834B2 (en) | Substrate processing apparatus, substrate processing method, substrate holding mechanism, and substrate holding method | |
| KR101725268B1 (en) | Substrate processing apparatus, substrate processing method, substrate holding mechanism, and substrate holding method | |
| KR102432238B1 (en) | Substrate processing apparatus | |
| CN101599423B (en) | Substrate processing apparatus, substrate processing method, substrate holding mechanism, and substrate holding method | |
| US7632378B2 (en) | Polishing apparatus | |
| US6354922B1 (en) | Polishing apparatus | |
| JP4127346B2 (en) | Polishing apparatus and method | |
| JP2014082470A (en) | Substrate processing apparatus | |
| WO2021248951A1 (en) | Substrate thinning method, substrate thinning device, and operating method thereof | |
| CN112289703A (en) | Substrate cleaning device, substrate processing device, and substrate cleaning method | |
| US11541502B2 (en) | Substrate processing apparatus | |
| US20240286245A1 (en) | Substrate treatment apparatus and method for treating substrate |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120330 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120330 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130702 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130902 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140304 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140930 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20141224 Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141224 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20150213 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150421 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150430 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5744382 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |