JP5513374B2 - 閉ループ制御方法、および多チャンネルフィードバックを有する閉ループ制御装置 - Google Patents
閉ループ制御方法、および多チャンネルフィードバックを有する閉ループ制御装置 Download PDFInfo
- Publication number
- JP5513374B2 JP5513374B2 JP2010509849A JP2010509849A JP5513374B2 JP 5513374 B2 JP5513374 B2 JP 5513374B2 JP 2010509849 A JP2010509849 A JP 2010509849A JP 2010509849 A JP2010509849 A JP 2010509849A JP 5513374 B2 JP5513374 B2 JP 5513374B2
- Authority
- JP
- Japan
- Prior art keywords
- variable
- control
- controller
- loop control
- current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims abstract description 44
- 238000005070 sampling Methods 0.000 claims abstract description 58
- 238000012935 Averaging Methods 0.000 claims abstract description 5
- 238000005259 measurement Methods 0.000 claims description 42
- 230000010354 integration Effects 0.000 claims description 17
- 230000006870 function Effects 0.000 claims description 9
- 239000004065 semiconductor Substances 0.000 claims description 3
- 230000000875 corresponding effect Effects 0.000 description 19
- 238000010586 diagram Methods 0.000 description 15
- 238000000691 measurement method Methods 0.000 description 14
- 230000009471 action Effects 0.000 description 8
- 238000004804 winding Methods 0.000 description 7
- 230000008901 benefit Effects 0.000 description 6
- 230000002123 temporal effect Effects 0.000 description 5
- 238000012546 transfer Methods 0.000 description 5
- 230000000694 effects Effects 0.000 description 4
- 230000010363 phase shift Effects 0.000 description 4
- 230000001419 dependent effect Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 2
- 230000001939 inductive effect Effects 0.000 description 2
- 108091007416 X-inactive specific transcript Proteins 0.000 description 1
- 108091035715 XIST (gene) Proteins 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 238000009776 industrial production Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 230000003071 parasitic effect Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000009131 signaling function Effects 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B21/00—Systems involving sampling of the variable controlled
- G05B21/02—Systems involving sampling of the variable controlled electric
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B11/00—Automatic controllers
- G05B11/01—Automatic controllers electric
- G05B11/26—Automatic controllers electric in which the output signal is a pulse-train
- G05B11/28—Automatic controllers electric in which the output signal is a pulse-train using pulse-height modulation; using pulse-width modulation
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B11/00—Automatic controllers
- G05B11/01—Automatic controllers electric
- G05B11/36—Automatic controllers electric with provision for obtaining particular characteristics, e.g. proportional, integral, differential
- G05B11/42—Automatic controllers electric with provision for obtaining particular characteristics, e.g. proportional, integral, differential for obtaining a characteristic which is both proportional and time-dependent, e.g. P. I., P. I. D.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Feedback Control In General (AREA)
- Control Of Electric Motors In General (AREA)
- Selective Calling Equipment (AREA)
- Use Of Switch Circuits For Exchanges And Methods Of Control Of Multiplex Exchanges (AREA)
- Time-Division Multiplex Systems (AREA)
Description
図1は、PI−コントローラおよびパルス幅変調によって負荷の電流制御を行う制御ループのブロック図を示す。
図2は、パルス幅変調によって実行された電流制御における時間的な電圧−/電流曲線を示す。
図3は、アンチエイリアシングローパスフィルタによる電流測定における時間的な電圧−/電流曲線を示す。
図4は、スイッチング周波数の期間の積分による電流測定における時間的な電圧−/電流曲線を示す。
図5は、時間における特定の高周波のない点にて、電流の進行を同期的にサンプリングすることによる電流測定における時間的な電圧−/電流曲線を示す。
図6Aは、2チャンネル電流フィードバックを有する、新しい電流コントローラのブロック図を示す。
図6Bは、3チャンネル電流フィードバックを有する、新しい電流コントローラのブロック図を示す。
図7は、サーボモータ用の新しい電流制御装置のブロック図を示す。
図8は、2つの異なる電流成分が互いに独立して決定され制御される、3相モータ用の電流コントローラのブロック図を示す。
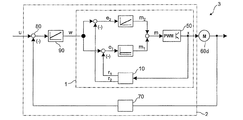
図9は、上記電流制御装置により重畳される回転速度制御装置を有する、閉ループ制御システムのブロック図を示す。

より高いサンプリングレートは、一般的に意味を成さない。ここでは、パルス幅変調はより速く切り替わるべきではあるが、技術的に好ましくない、または不可能である。また、より低いサンプリングレートも意味を成さない。これは、閉ループ制御が不必要に遅く行われるためである。
Claims (23)
- 閉ループ制御方法であって、
サンプリングレート(fA)にて制御変数(x)をサンプリングすることにより第1フィードバック変数(r1)を決定するステップであって、上記制御変数(x)の実際の値(xist)が上記サンプリングレート(fA)により決定される時点(t1,t2,t3,t4)においてそれぞれ記録され、上記実際の値(xist)が第1フィードバック変数(r1)として与えられるステップと、
上記第1フィードバック変数(r1)をコマンド変数(w)と比較することにより第1制御偏差(e1)を決定するステップと、
第1コントローラ(31)によって、上記第1制御偏差(e1)から第1個別コントローラ出力変数(m1)を生成するステップと、
上記制御変数(x)を平均化することにより第2フィードバック変数(r2)を決定するステップであって、上記制御変数(x)の実際の値(xist)が期間(TS)にわたって記録され、当該実際の値から平均値が生成され、上記平均化された実際の値(xint)が第2フィードバック変数(r2)として与えられるステップと、
上記第2フィードバック変数(r2)を上記コマンド変数(w)と比較することにより第2制御偏差(e2)を決定するステップと、
第2コントローラ(32)によって、上記第2制御偏差(e2)から第2個別コントローラ出力変数(m2)を生成するステップと、
上記2つの個別コントローラ出力変数(m1,m2)からコントローラ出力変数(m)を生成するステップとを含み、
上記制御変数(x)が上記コマンド変数(w)を追従するように、上記制御変数(x)を設定するための上記コントローラ出力変数(m)を用い、
上記第1個別コントローラ出力変数(m 1 )は、比例コントローラ(31)によって、上記第1制御偏差(e 1 )から生成され、かつ/または、
上記第2個別コントローラ出力変数(m 2 )は、積分コントローラ(32)によって、上記第2制御偏差(e 2 )から生成され、
上記コントローラ出力変数(m)は、上記2つの個別コントローラ出力変数(m 1 ,m 2 )を合計することにより生成される、閉ループ制御方法。 - 上記第2フィードバック変数(r2)は、上記期間(TS)にわたる上記制御変数(x)の実際の値(xist)の積分により決定される、請求項1に記載の閉ループ制御方法。
- スイッチング周波数(fS)で計測された作動変数(y)が、上記制御変数(x)を設定するための上記コントローラ出力変数(m)から生成され、
上記制御変数(x)のサンプリングは、上記スイッチング周波数(fS)の2倍にて行われ、かつ/または、
上記制御変数(x)の平均値(xint)は、上記作動変数(y)のスイッチング周波数(fS)により予め決定されるスイッチング期間(TS)、または、当該スイッチング期間(TS)の整数倍、に対応する期間にわたって生成される、請求項1または2に記載の閉ループ制御方法。 - 上記制御変数(x)のサンプリングは、上記作動変数(y)の計測に用いられるクロック信号と同期して行われる、請求項3に記載の閉ループ制御方法。
- 各ケースにおいて、上記サンプリングは、上記制御変数(x)の高周波のない時点にて行われる、請求項1〜4のいずれか1項に記載の閉ループ制御方法。
- 上記作動変数(y)は、パルス幅変調されたものである、請求項3または4に記載の閉ループ制御方法。
- 上記制御変数(x)は、デジタルコントローラによって制御され、
アナログ信号は、デルタ−シグマ変調器によってデジタル化される、請求項1〜6のいずれか1項に記載の閉ループ制御方法。 - 制御変数(x)として、負荷の電流が制御される、請求項1〜7のいずれか1項に記載の閉ループ制御方法。
- 電気モータ(60b;60c;60d)の電流が、制御変数(x)として制御され、かつ、
上記コマンド変数(w)は、上位の回転速度制御ループ(2)によって与えられる、または、上位の回転速度制御ループ(2)およびフィードフォワードシステムによって与えられる、請求項8に記載の閉ループ制御方法。 - 閉ループ制御装置(1)であって、
測定装置(10)と、
第1および第2比較素子(21,22)を有する比較装置(20)と、
第1および第2コントローラ(31,32)を有する閉ループ制御装置(30)と、
加算装置(40)と、
作動ユニット(50)とを備え、
上記測定装置(10)は、制御変数(x)をサンプリングすることにより第1フィードバック変数(r1)を決定するように構成され、上記制御変数(x)の実際の値(xist)は、サンプリング周波数(fA)により決定される時点(t1,t2,t3,t4)ごとに記録され、上記制御変数(x)の実際の値(xist)は第1フィードバック変数(r1)として与えられ、
上記測定装置(10)は、上記制御変数(x)を平均化することにより第2フィードバック変数(r2)を決定するようにさらに構成され、上記制御変数(x)の実際の値(xist)は期間(TS)にわたって決定および平均化され、上記平均化された実際の値(xint)は第2フィードバック変数(r2)として与えられ、
上記第1比較素子(21)は、上記第1フィードバック変数(r2)とコマンド変数(w)との比較によって、第1制御偏差(e1)を生成するように構成され、
上記第2比較素子(22)は、上記第2フィードバック変数(r2)とコマンド変数(w)との比較によって、第2制御偏差(e2)を生成するように構成され、
上記第1コントローラ(31)は、上記第1制御偏差(e1)から第1個別コントローラ出力変数(m1)を生成するように構成され、
上記第2コントローラ(32)は、上記第2制御偏差(e2)から第2個別コントローラ出力変数(m2)を生成するように構成され、
上記加算装置(40)は、上記2つの個別コントローラ出力変数(m1,m2)からコントローラ出力変数(m)を生成するように構成され、
上記作動ユニット(50)は、上記制御変数(x)が上記コマンド変数(w)を追従するように、上記コントローラ出力変数(m)によって上記制御変数(x)を設定し、
上記第1コントローラ(31)は比例コントローラであり、かつ/または、上記第2コントローラ(32)は積分コントローラであり、
上記加算装置(40)は、上記2つの個別コントローラ出力変数(m 1 ,m 2 )を合計することにより、上記コントローラ出力変数(m)を生成する、閉ループ制御装置。 - 上記測定装置(10)は、上記期間(TS)にわたる上記制御変数(x)の積分によって上記平均化された実際の値(xist)を生成するために、積分装置(12)を備えている、請求項10に記載の閉ループ制御装置。
- 上記作動ユニット(50)は、上記制御変数(x)を設定するために、上記コントローラ出力変数(m)から、スイッチング周波数(fS)で計測される作動変数(y)を生成するように構成され、
上記測定装置(10)は、上記スイッチング周波数(fS)の2倍にて上記制御変数(x)を採取するように構成され、かつ/または、
上記測定装置(10)は、上記作動変数(y)のスイッチング周波数(fS)により予め決定されるスイッチング期間(TS)、または、当該スイッチング期間(TS)の整数倍、に対応する期間にわたって、上記制御変数(x)の平均値(xint)を生成するように構成されている、請求項10または11に記載の閉ループ制御装置。 - 上記測定装置(10)は、上記作動ユニット(50)が上記作動変数(y)の計測に用いるクロック信号と同期して上記制御変数(x)を採取するように構成されている、請求項12に記載の閉ループ制御装置。
- 上記測定装置(10)は、上記制御変数(x)における高周波のない時点ごとに上記サンプリングを行うように構成されている、請求項13に記載の閉ループ制御装置。
- 上記作動ユニット(50)は、上記作動変数(y)をパルス幅変調するためのパルス幅変調器(51)を備えている、請求項12〜14のいずれか1項に記載の閉ループ制御装置。
- 上記閉ループ制御装置(30)は、デジタルコントローラとして構成されている、請求項10〜15のいずれか1項に記載の閉ループ制御装置。
- 上記測定装置(10)は、アナログ信号をデジタル化するデルタ−シグマ変調器(13)を備え、かつ、
上記閉ループ制御装置(30)は、デジタルコントローラとして構成されており、
上記測定装置(10)における上記積分装置(12)および/またはサンプリング装置(11)は、プログラマブル半導体装置におけるアルゴリズムとして実行される、請求項11に記載の閉ループ制御装置。 - 上記閉ループ制御装置(1)は、負荷の電流コントローラとして構成されている、請求項10〜17のいずれか1項に記載の閉ループ制御装置。
- 上記閉ループ制御装置(1)は、負荷の電流コントローラとして構成されていると共に、上位の回転速度制御ループ(2)の一部であり、上記作動変数は、上記電流コントローラのコマンド変数(w)を、単独で、または、フィードフォワードシステムとともに生成する、請求項12から15のいずれか1項に記載の閉ループ制御装置。
- 上記閉ループ制御装置(1)は、サーボモータ(60d)のための電流制御装置として構成されている、請求項18または19に記載の閉ループ制御装置。
- 上記閉ループ制御装置(1)は、ステイター固定フレームにおける三相モータ(60c)の電流を制御するように構成され、かつ、
上記適用されたステイター固定フレームに応じて、2つまたは3つの測定装置(10’,10’’)、並びに、2つまたは3つの制御装置(20’,20’’)が、相互に独立して、上記各ステイター固定フレームにおける個別電流成分(ia,ib,ic,iα,iβ)を記録および制御するために設けられている、請求項18〜20のいずれか1項に記載の閉ループ制御装置。 - 上記閉ループ制御装置(1)は、フィールド指向座標システムにおける三相モータ(60c)の電流を制御するように構成され、かつ、
上記フィールド指向座標システムにおける各電流成分(iq,id)のための、各制御装置(20’,20’’)が設けられ、かつ、
2つまたは3つの測定装置(10’,10’’)が、相互に独立して、上記フィールド指向座標システムにおける2つの電流成分(iq,id)、または、上記三相モータ(60c)における3つの電流成分(ia,ib,ic)の全て、を記録するために設けられている、請求項18〜20のいずれか1項に記載の閉ループ制御装置。 - 閉ループ制御システム(3)であって、
電気モータ(60b;60c;60d)と回転速度制御ループ(2)とを備え、
上記回転速度制御ループ(2)は、請求項10〜22のいずれか1項に記載の閉ループ制御装置(1)を備え、上記回転速度制御ループ(2)は、上記電気モータ(60b;60c;60d)のための電流制御装置として機能する、閉ループ制御システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102007032484.9 | 2007-07-12 | ||
| DE102007032484A DE102007032484A1 (de) | 2007-07-12 | 2007-07-12 | Regelverfahren und Regelvorrichtung mit mehrkanaliger Rückführung |
| PCT/EP2008/058948 WO2009007407A1 (de) | 2007-07-12 | 2008-07-09 | Regelverfahren und regelvorrichtung mit mehrkanaliger rückführung |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010528385A JP2010528385A (ja) | 2010-08-19 |
| JP2010528385A5 JP2010528385A5 (ja) | 2013-09-05 |
| JP5513374B2 true JP5513374B2 (ja) | 2014-06-04 |
Family
ID=39967191
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010509849A Active JP5513374B2 (ja) | 2007-07-12 | 2008-07-09 | 閉ループ制御方法、および多チャンネルフィードバックを有する閉ループ制御装置 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US8203300B2 (ja) |
| EP (1) | EP2111569B1 (ja) |
| JP (1) | JP5513374B2 (ja) |
| CN (1) | CN101743521B (ja) |
| AT (1) | ATE475120T1 (ja) |
| DE (2) | DE102007032484A1 (ja) |
| ES (1) | ES2347500T3 (ja) |
| PT (1) | PT2111569E (ja) |
| WO (1) | WO2009007407A1 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4286883B2 (ja) | 2007-06-27 | 2009-07-01 | 三菱電機株式会社 | 三相ブラシレスモータの制御装置 |
| US8965538B2 (en) * | 2010-05-19 | 2015-02-24 | The Boeing Company | Methods and apparatus for state limiting in a control system |
| DE102010036941B4 (de) * | 2010-08-11 | 2012-09-13 | Sauer-Danfoss Gmbh & Co. Ohg | Verfahren und Vorrichtung zur Ermittlung des Zustands eines elektrisch angesteuerten Ventils |
| DE112010006059B4 (de) | 2010-12-08 | 2020-08-13 | Denso Corporation | Spannungswandlungssteuervorrichtung für mehrere Motoren |
| DE102011080587A1 (de) | 2011-08-08 | 2013-02-14 | Lenze Se | Verfahren zum Messen eines mittels eines Frequenzumrichters erzeugten analogen Signals |
| DE102011080586A1 (de) | 2011-08-08 | 2013-02-14 | Lenze Se | Verfahren zum Erzeugen eines digitalen Signals |
| DE102011121879A1 (de) | 2011-12-21 | 2013-06-27 | Robert Bosch Gmbh | Steuereinrichtung und Steuerverfahren zur Steuerung einer Antriebseinrichtung |
| FI126063B (en) * | 2014-05-21 | 2016-06-15 | Vacon Oy | Limiting electrical interference |
| DE102015212149A1 (de) * | 2015-06-30 | 2017-01-05 | TRUMPF Hüttinger GmbH + Co. KG | Leistungsversorgungssystem und Verfahren zur Einstellung einer Ausgangsgröße der Verstärkerstufe eines Leistungsversorgungssystems |
| US10287001B2 (en) * | 2016-06-15 | 2019-05-14 | Kitty Hawk Corporation | Self-adjusting system for aircraft control |
| WO2018215153A1 (en) | 2017-05-22 | 2018-11-29 | Asml Netherlands B.V. | Control system, method to increase a bandwidth of a control system, and lithographic apparatus |
| WO2019076881A2 (en) * | 2017-10-18 | 2019-04-25 | Biosurfit, S.A. | PROPORTIONAL-INTEGRAL-DERIVED CONTROL METHODS |
| DE102019102761B4 (de) | 2019-02-05 | 2020-08-13 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Verfahren und Schaltung zur Vermeidung von Integriersättigung bei einem Delta-Sigma-Modulator |
| CN112388623B (zh) * | 2019-08-15 | 2022-05-06 | 深圳市优必选科技股份有限公司 | 舵机位置控制方法、装置、终端设备及介质 |
| US11418133B2 (en) * | 2020-02-07 | 2022-08-16 | King Fahd University Of Petroleum And Minerals | System and method to control slip-stick stages |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4000663C1 (ja) | 1990-01-11 | 1991-06-13 | Siemens Nixdorf Informationssysteme Ag, 4790 Paderborn, De | |
| JPH09182493A (ja) * | 1995-12-27 | 1997-07-11 | Matsushita Electric Ind Co Ltd | 空気調和機のインバータ制御方法、及びその制御装置 |
| DE19614866A1 (de) * | 1996-04-16 | 1997-10-23 | Zahnradfabrik Friedrichshafen | Verfahren zur Stromregelung |
| DE19961798C2 (de) | 1999-12-22 | 2001-11-15 | Daimler Chrysler Ag | Verfahren und Anordnung zur Regelung des Stroms in einer geschalteten Reluktanzmaschine |
| DE10063895A1 (de) * | 2000-12-21 | 2002-07-11 | Bosch Gmbh Robert | Verfahren und Regelkreis zur Regelung des Stroms eines Elektromotors |
| US6774860B2 (en) * | 2002-05-15 | 2004-08-10 | Northrop Grumman Corporation | UAV (unmanned air vehicle) servoing dipole |
| DE10226974A1 (de) * | 2002-06-17 | 2004-01-08 | Siemens Ag | Verfahren und Vorrichtung zur Bestimmung einer Rotorlage einer feldorientiert betriebenen Drehfeldmaschine ohne mechanischen Sensor |
| US6977492B2 (en) | 2002-07-10 | 2005-12-20 | Marvell World Trade Ltd. | Output regulator |
| DE10253739B3 (de) * | 2002-11-19 | 2004-05-06 | Mtu Friedrichshafen Gmbh | Verfahren zur Drehzahl-Regelung einer Brennkraftmaschine |
| KR20050012478A (ko) | 2003-07-25 | 2005-02-02 | 유티스타콤코리아 유한회사 | Cdma-2000 시스템에서의 왈시 코드 배정을 이용한papr 제어 방법 |
| JP4220907B2 (ja) * | 2004-01-16 | 2009-02-04 | デンヨー株式会社 | 発電機出力電圧のpid制御方法 |
| TW200534068A (en) * | 2004-04-07 | 2005-10-16 | Macronix Int Co Ltd | Close loop control system and method thereof |
| DE102004023365B4 (de) | 2004-05-12 | 2007-07-19 | Mtu Friedrichshafen Gmbh | Verfahren zur Druck-Regelung eines Speichereinspritzsystems |
| CN1332274C (zh) * | 2005-02-03 | 2007-08-15 | 上海交通大学 | 化工双输入输出过程的分布式pi和pid控制器的定量整定方法 |
| DE102005023453A1 (de) | 2005-05-20 | 2006-11-23 | Siemens Ag | Ansteuerschaltung für einen Stromrichter und Stromversorgungseinrichtung und Verwendung eines FPGA |
| CN100428090C (zh) * | 2006-10-19 | 2008-10-22 | 上海交通大学 | 工业多输入输出过程的分布式pi和pid控制器定量整定方法 |
| CN100428091C (zh) * | 2006-10-20 | 2008-10-22 | 北京工业大学 | 基于dsp的可变谐振频率液压振动控制系统及方法 |
-
2007
- 2007-07-12 DE DE102007032484A patent/DE102007032484A1/de not_active Withdrawn
-
2008
- 2008-07-09 CN CN2008800188263A patent/CN101743521B/zh active Active
- 2008-07-09 JP JP2010509849A patent/JP5513374B2/ja active Active
- 2008-07-09 ES ES08774952T patent/ES2347500T3/es active Active
- 2008-07-09 AT AT08774952T patent/ATE475120T1/de active
- 2008-07-09 EP EP08774952A patent/EP2111569B1/de active Active
- 2008-07-09 PT PT08774952T patent/PT2111569E/pt unknown
- 2008-07-09 DE DE502008000989T patent/DE502008000989D1/de active Active
- 2008-07-09 WO PCT/EP2008/058948 patent/WO2009007407A1/de active Application Filing
-
2010
- 2010-01-11 US US12/685,115 patent/US8203300B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2111569B1 (de) | 2010-07-21 |
| WO2009007407A1 (de) | 2009-01-15 |
| ATE475120T1 (de) | 2010-08-15 |
| CN101743521B (zh) | 2012-05-23 |
| ES2347500T3 (es) | 2010-10-29 |
| CN101743521A (zh) | 2010-06-16 |
| PT2111569E (pt) | 2010-09-07 |
| US8203300B2 (en) | 2012-06-19 |
| EP2111569A1 (de) | 2009-10-28 |
| DE102007032484A1 (de) | 2009-01-22 |
| DE502008000989D1 (de) | 2010-09-02 |
| US20100141198A1 (en) | 2010-06-10 |
| JP2010528385A (ja) | 2010-08-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5513374B2 (ja) | 閉ループ制御方法、および多チャンネルフィードバックを有する閉ループ制御装置 | |
| JP2010528385A5 (ja) | ||
| JP3813637B2 (ja) | 交流電動機の制御装置 | |
| JP5188511B2 (ja) | 電力変換器の制御装置 | |
| JP5253828B2 (ja) | モータ駆動装置および半導体集積回路装置 | |
| JP6160189B2 (ja) | モータ制御装置、画像処理装置、及びモータ制御方法 | |
| Vázquez-Gutiérrez et al. | Small-signal modeling of the incremental optical encoder for motor control | |
| JP2010239730A (ja) | 交流モータの制御装置及び交流モータ駆動システム | |
| CN110720174B (zh) | 用于确定借助pwm控制的逆变器来供给的旋转的多相电机的相电流的方法 | |
| JP3681941B2 (ja) | 電源高調波抑制装置 | |
| JP2013223350A (ja) | Δς変調型ad変換器を有するモータ制御装置 | |
| WO2018198694A1 (ja) | 電圧指令値を出力する制御装置 | |
| Ralev et al. | Adopting a SOGI filter for flux-linkage based rotor position sensing of switched reluctance machines | |
| JP2013055820A (ja) | 交流電動機の制御装置 | |
| JP5131467B2 (ja) | 電力変換器の制御装置 | |
| Wang et al. | Comparative study of low-pass filter and phase-locked loop type speed filters for sensorless control of AC drives | |
| KR20020060057A (ko) | 인버터 장치 | |
| JP3818237B2 (ja) | 同期電動機の制御装置 | |
| JP6222834B2 (ja) | モータ制御装置 | |
| CN109818547B (zh) | 具有电流检测器的电动机驱动装置 | |
| Dabbeti et al. | Sensorless speed control of an induction motor drive using predictive current and torque controllers | |
| JP5744151B2 (ja) | 電動機の駆動装置および電動機の駆動方法 | |
| JP2020046709A (ja) | サーボ制御装置及びサーボシステム | |
| Tan | Development of variable voltage variable frequency drive system for induction motor speed control | |
| JP2019004660A (ja) | モータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111101 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120119 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120126 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120426 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120717 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20121116 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20121116 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20130719 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20131018 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20131023 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140213 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140327 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5513374 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |