JP5500879B2 - 画像処理装置および画像処理方法 - Google Patents
画像処理装置および画像処理方法 Download PDFInfo
- Publication number
- JP5500879B2 JP5500879B2 JP2009147005A JP2009147005A JP5500879B2 JP 5500879 B2 JP5500879 B2 JP 5500879B2 JP 2009147005 A JP2009147005 A JP 2009147005A JP 2009147005 A JP2009147005 A JP 2009147005A JP 5500879 B2 JP5500879 B2 JP 5500879B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- diffraction
- virtual
- distance
- real
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/14—Measuring arrangements characterised by the use of optical techniques for measuring distance or clearance between spaced objects or spaced apertures
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/10—Beam splitting or combining systems
- G02B27/1086—Beam splitting or combining systems operating by diffraction only
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/10—Beam splitting or combining systems
- G02B27/16—Beam splitting or combining systems used as aids for focusing
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/42—Diffraction optics, i.e. systems including a diffractive element being designed for providing a diffractive effect
- G02B27/4233—Diffraction optics, i.e. systems including a diffractive element being designed for providing a diffractive effect having a diffractive element [DOE] contributing to a non-imaging application
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/28—Systems for automatic generation of focusing signals
- G02B7/36—Systems for automatic generation of focusing signals using image sharpness techniques, e.g. image processing techniques for generating autofocus signals
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/521—Depth or shape recovery from laser ranging, e.g. using interferometry; from the projection of structured light
Description
回折格子と撮像光学系を介して得られる対象物体の像を撮像部を用いて撮像することにより得られた回折画像を取得する取得手段と、
前記回折格子と前記撮像光学系との間に配置されたRGBフィルタと、
前記回折画像の輝度勾配から実像を検出する実像検出手段と、
前記回折画像において、少なくとも1つの虚像の位置を検出する虚像検出手段と、
前記回折画像における虚像の位置と、前記RGBフィルタの特性とに基づいて、前記回折画像において、前記検出された実像と、この実像に対応する虚像との距離を算出する第1算出手段と、
前記第1算出手段で算出された距離を用いて、前記対象物体と前記回折格子との奥行き距離を算出する第2算出手段とを備える。
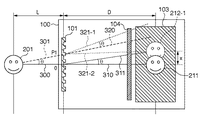
回折格子を用いた画像特徴の奥行きの計測について述べていく。図1に代表的な画像処理装置の構成を示す。

2つの虚像の対称性を利用した虚像を特定する方法について述べる。実施形態1と同様に図1〜4を用いて説明をしていく。
RGBの波長差によって異なる虚像間距離を利用した虚像を特定する方法について述べる。実施形態1と同様に図1〜4を用いて説明を行う。
本実施形態では、撮像装置に回折格子を組み合わせた場合の特性を利用して実像のみを抽出する手法について説明する。
実施形態5では、虚像212のコントラストが低い問題に対処する。このために、回折による虚像が対象性を持つことを利用し、S/N比を向上させる。
Claims (8)
- 回折格子と撮像光学系を介して得られる対象物体の像を撮像部を用いて撮像することにより得られた回折画像を取得する取得手段と、
前記回折格子と前記撮像光学系との間に配置されたRGBフィルタと、
前記回折画像の輝度勾配から実像を検出する実像検出手段と、
前記回折画像において、少なくとも1つの虚像の位置を検出する虚像検出手段と、
前記回折画像における虚像の位置と、前記RGBフィルタの特性とに基づいて、前記回折画像において、前記検出された実像と、この実像に対応する虚像との距離を算出する第1算出手段と、
前記第1算出手段で算出された距離を用いて、前記対象物体と前記回折格子との奥行き距離を算出する第2算出手段とを備えることを特徴とする画像処理装置。 - 前記第1算出手段は、前記検出される回折画像における虚像の位置と、前記RGBフィルタの波長特性とに基づいて、前記検出される実像と、該実像に対応する虚像との距離を算出することを特徴とする請求項1に記載の画像処理装置。
- 前記虚像検出手段は、複数の虚像を検出し、
前記第1算出手段は、前記検出される複数の虚像それぞれとの位置と、前記RGBフィルタの波長特性とに基づいて、前記検出される複数の虚像のうちから、少なくとも1つの虚像を選択し、該選択される虚像と前記実像との距離を算出することを特徴とする請求項1または2に記載の画像処理装置。 - 前記虚像検出手段は、前記実像の中心を中心とする第1ウィンドウと該第1ウィンドウを前記回折格子のスリットと垂直な方向へ移動させた第2ウィンドウとを設定し、
前記第1ウィンドウにおける輝度分布と前記第2ウィンドウにおける輝度分布との相関に基づき前記虚像の位置を検出することを特徴とする請求項1に記載の画像処理装置。 - 回折格子と撮像光学系を介して得られる対象物体の像を撮像部を用いて撮像することにより得られた回折画像を取得する取得手段と、
前記回折画像の輝度勾配から実像を検出する実像検出手段と、
前記回折画像において、前記検出された実像と、この実像に対応する虚像との距離を算出する第1算出手段と、
前記第1算出手段で算出された距離を用いて、前記対象物体と前記回折格子との奥行き距離を算出する第2算出手段と、
前記回折格子と前記撮像光学系との間に配置されたRGBフィルタとを備え、
前記第1算出手段は、前記回折画像において複数の虚像が、R、G、Bの各波長に対応する位置に出現し、前記実像と該複数の虚像の各々との距離の比が、該R、G、Bの各波長の比と等しくなるとき、前記実像と前記虚像との距離を算出することを特徴とする画像処理装置。 - 前記回折画像において対称に出現した虚像の対について、前記実像の中心位置を中心に折り返して該虚像の対の間の輝度値を加算し、前記加算された値の平均をとる加算平均手段を更に備えることを特徴とする請求項5に記載の画像処理装置。
- 回折格子、撮像光学系、および前記回折格子と前記撮像光学系との間に配置されたRGBフィルタを介して得られる対象物体の像を撮像部を用いて撮像することにより得られた回折画像を処理する画像処理方法であって、
実像検出手段が、前記回折画像の輝度勾配から実像を検出する実像検出工程と、
虚像検出手段が、前記回折画像において、少なくとも1つの虚像の位置を検出する虚像検出工程と、
第1算出手段が、前記回折画像における虚像の位置と、前記RGBフィルタの特性とに基づいて、前記回折画像において、前記検出された実像と、この実像に対応する虚像との距離を算出する第1算出工程と、
第2算出手段が、前記算出された距離を用いて、前記対象物体と前記回折格子との奥行き距離を算出する第2算出工程とを備えることを特徴とする画像処理方法。 - 回折格子、撮像光学系、および前記回折格子と前記撮像光学系との間に配置されたRGBフィルタを介して得られる対象物体の像を撮像部を用いて撮像することにより得られた回折画像を処理する画像処理方法であって、
実像検出手段が、前記回折画像の輝度勾配から実像を検出する実像検出工程と、
第1算出手段が、前記回折画像において、前記検出された実像と、この実像に対応する虚像との距離を算出する第1算出工程と、
第2算出手段が、前記第1算出工程で算出された距離を用いて、前記対象物体と前記回折格子との奥行き距離を算出する第2算出工程と、を有し、
前記第1算出工程では、前記回折画像において複数の虚像が、R、G、Bの各波長に対応する位置に出現し、前記実像と該複数の虚像の各々との距離の比が、該R、G、Bの各波長の比と等しくなるとき、前記実像と前記虚像との距離を算出することを特徴とする画像処理方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009147005A JP5500879B2 (ja) | 2009-06-19 | 2009-06-19 | 画像処理装置および画像処理方法 |
| US12/796,185 US8456619B2 (en) | 2009-06-19 | 2010-06-08 | Image processing apparatus and method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009147005A JP5500879B2 (ja) | 2009-06-19 | 2009-06-19 | 画像処理装置および画像処理方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011002387A JP2011002387A (ja) | 2011-01-06 |
| JP2011002387A5 JP2011002387A5 (ja) | 2012-08-02 |
| JP5500879B2 true JP5500879B2 (ja) | 2014-05-21 |
Family
ID=43354424
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009147005A Active JP5500879B2 (ja) | 2009-06-19 | 2009-06-19 | 画像処理装置および画像処理方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8456619B2 (ja) |
| JP (1) | JP5500879B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012063463A1 (ja) * | 2010-11-09 | 2012-05-18 | パナソニック株式会社 | 距離計測装置および距離計測方法 |
| JP2013210254A (ja) * | 2012-03-30 | 2013-10-10 | Canon Inc | 三次元計測装置、三次元計測方法及び三次元計測プログラム |
| JP5958837B2 (ja) * | 2012-05-28 | 2016-08-02 | パナソニックIpマネジメント株式会社 | 奥行き推定撮像装置 |
| JP6008298B2 (ja) | 2012-05-28 | 2016-10-19 | パナソニックIpマネジメント株式会社 | 画像処理装置、撮像装置、画像処理方法、およびプログラム |
| JP6169339B2 (ja) * | 2012-10-04 | 2017-07-26 | 株式会社日立製作所 | 形状計測方法及び装置 |
| CA3084679C (en) * | 2017-12-05 | 2023-03-07 | Airy3D Inc. | Light field image processing method for depth acquisition |
| US10922829B2 (en) * | 2018-06-06 | 2021-02-16 | Qualcomm Incorporated | Zero order light removal in active sensing systems |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2528921B2 (ja) * | 1987-01-13 | 1996-08-28 | デヴイット,トマス | 回折による距離測定 |
| JPH08105709A (ja) * | 1994-10-03 | 1996-04-23 | Ricoh Co Ltd | 光学式センサ |
| US6603561B2 (en) * | 2001-02-20 | 2003-08-05 | Thomas D. Ditto | Chromatic diffraction range finder |
| JP2004069314A (ja) * | 2002-08-01 | 2004-03-04 | Olympus Corp | 焦点距離測定装置 |
| JP2008077741A (ja) * | 2006-09-20 | 2008-04-03 | Victor Co Of Japan Ltd | 回折格子の測定装置及び回折格子の測定方法 |
| JP2008089402A (ja) * | 2006-10-02 | 2008-04-17 | Konica Minolta Holdings Inc | 情報処理システム、プログラムおよび情報処理方法 |
| JP4382797B2 (ja) * | 2006-11-09 | 2009-12-16 | 株式会社山武 | 対応点探索方法および3次元位置計測方法 |
| JP4919156B2 (ja) * | 2006-12-19 | 2012-04-18 | 株式会社ニコン | 画像処理方法および画像処理装置 |
| JP2008256639A (ja) * | 2007-04-09 | 2008-10-23 | Nikon Corp | 位置測定装置 |
-
2009
- 2009-06-19 JP JP2009147005A patent/JP5500879B2/ja active Active
-
2010
- 2010-06-08 US US12/796,185 patent/US8456619B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011002387A (ja) | 2011-01-06 |
| US20100322481A1 (en) | 2010-12-23 |
| US8456619B2 (en) | 2013-06-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5500879B2 (ja) | 画像処理装置および画像処理方法 | |
| US10455218B2 (en) | Systems and methods for estimating depth using stereo array cameras | |
| US9633442B2 (en) | Array cameras including an array camera module augmented with a separate camera | |
| JP5929553B2 (ja) | 画像処理装置、撮像装置、画像処理方法およびプログラム | |
| US11037310B2 (en) | Image processing device, image processing method, and image processing program | |
| JP6585006B2 (ja) | 撮影装置および車両 | |
| JP6172978B2 (ja) | 撮像装置、撮像システム、信号処理装置、プログラム、および、記憶媒体 | |
| CN107084680B (zh) | 一种基于机器单目视觉的目标深度测量方法 | |
| WO2013012335A1 (en) | Imaging device for motion detection of objects in a scene, and method for motion detection of objects in a scene | |
| US9438887B2 (en) | Depth measurement apparatus and controlling method thereof | |
| WO2019124040A1 (ja) | 測距カメラ | |
| JP2017150878A (ja) | 画像処理装置、撮像装置および画像処理プログラム | |
| JP2010066156A (ja) | 形状測定装置 | |
| JP2011149931A (ja) | 距離画像取得装置 | |
| US11812137B2 (en) | Measurement apparatus, image capturing apparatus, control method, and recording medium | |
| JP2010256296A (ja) | 全方位3次元空間認識入力装置 | |
| US11644682B2 (en) | Systems and methods for diffraction line imaging | |
| Kim et al. | Aperture-encoded snapshot hyperspectral imaging with a lensless camera | |
| Jawad et al. | Measuring object dimensions and its distances based on image processing technique by analysis the image using sony camera | |
| TWI668411B (zh) | 位置檢測方法及其電腦程式產品 | |
| JP6675510B2 (ja) | 被写体追跡装置およびその制御方法、画像処理装置およびその制御方法、撮像装置およびその制御方法、プログラム | |
| KR101915883B1 (ko) | 만화경을 이용한 초분광 영상 관측 방법 및 시스템 | |
| JP7200002B2 (ja) | 画像処理装置、撮像装置、画像処理方法、プログラム、および記憶媒体 | |
| WO2019012660A1 (ja) | 画像処理装置およびライトフィールド撮像装置 | |
| Ariff et al. | A study of near-infrared (NIR) filter for surveillance application |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120619 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120619 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130617 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130621 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130819 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140120 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140122 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140210 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140311 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5500879 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |