JP5460468B2 - クラッチ装置及びアクチュエータ - Google Patents
クラッチ装置及びアクチュエータ Download PDFInfo
- Publication number
- JP5460468B2 JP5460468B2 JP2010125567A JP2010125567A JP5460468B2 JP 5460468 B2 JP5460468 B2 JP 5460468B2 JP 2010125567 A JP2010125567 A JP 2010125567A JP 2010125567 A JP2010125567 A JP 2010125567A JP 5460468 B2 JP5460468 B2 JP 5460468B2
- Authority
- JP
- Japan
- Prior art keywords
- movable body
- rotating body
- eccentric
- rotation
- rotation axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 210000000078 claw Anatomy 0.000 claims description 86
- 230000002093 peripheral effect Effects 0.000 claims description 16
- 238000013459 approach Methods 0.000 claims description 11
- 230000000149 penetrating effect Effects 0.000 claims 1
- 230000005540 biological transmission Effects 0.000 description 15
- 238000004519 manufacturing process Methods 0.000 description 10
- 230000033001 locomotion Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 230000004048 modification Effects 0.000 description 5
- 238000012986 modification Methods 0.000 description 5
- 230000000052 comparative effect Effects 0.000 description 4
- 230000003111 delayed effect Effects 0.000 description 4
- 238000003825 pressing Methods 0.000 description 4
- 230000001105 regulatory effect Effects 0.000 description 4
- 230000000903 blocking effect Effects 0.000 description 3
- 230000007257 malfunction Effects 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 238000002347 injection Methods 0.000 description 2
- 239000007924 injection Substances 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 230000004308 accommodation Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000001746 injection moulding Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
Images













Description
前記ベース部材に対して回転軸芯周りに回転可能に支持され、駆動源に回転駆動される第1回転体と、
前記ベース部材に対して前記回転軸芯周りに回転可能に支持され、前記第1回転体に隣接する第2回転体と、
前記第1回転体と前記第2回転体との間に設けられ、前記第1回転体と前記第2回転体とが一体回転する接続状態と、前記第1回転体とは無関係に前記第2回転体が回転可能な遮断状態とを切り替える切替手段とを備えるクラッチ装置であって、
前記切替手段は、前記第1回転体に対して回動角度が初期位置から所定角度までの間に制限されつつ前記回転軸芯周りに回動可能に支持された第1可動体と、
前記第1可動体に対して前記回転軸芯から偏心した偏心軸芯周りに回動可能に支持され、前記第1回転体が前記駆動源に回転駆動されない場合、前記第1可動体が前記初期位置に位置することにより前記回転軸芯に近づいて前記第2回転体から離反する一方、前記第1回転体が前記駆動源に回転駆動されて正方向に回転する場合、前記第1可動体が前記初期位置から回動することにより前記回転軸芯から離れて前記第2回転体に係合する第2可動体と、
前記第1回転体又は前記第2可動体と前記第1可動体との間に設けられ、前記第1可動体を前記初期位置に向かって付勢する付勢部材と、
前記ベース部材に設けられ、前記第1可動体に所定の摩擦力を付与して、前記第1可動体の前記回転軸芯周りの回転を制動し、前記第1回転体に対する前記第1可動体の回り遅れを生じさせる制動部材とを有することを特徴とする(請求項1)。
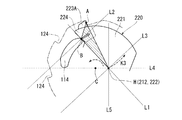
回転軸芯は、直線L2と直線L3とに挟まれる領域に存在し、爪部は、直線L4により仕切られる2つの領域のうち、偏心軸芯を基準として第1回転体の回転方向と逆方向にある領域に存在し、当接位置は、直線L5により仕切られる2つの領域のうち、回転軸芯がある領域に存在していることが好ましい(請求項5)。
図1に示すように、実施例のクラッチ装置10は、アクチュエータ1の一部を構成している。図示は省略するが、アクチュエータ1は、例えば車両に搭載されて、車両用開閉体(例えば、ドア)のラッチ解除用に用いられる。但し、本発明によるクラッチ装置は、以下の事例に限らず、自動車ドアのラッチ施錠用、或いは、ドアロック装置のロッキングレバーを施錠側又は解除側に操作する各アクチュエーターを含めた、多種の用途に用いることが可能であることは言うまでもない。以下、アクチュエータ1の各構成要素について説明する。
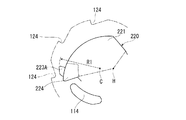
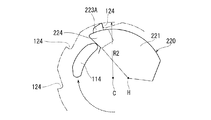
変形例のクラッチ装置は、実施例の第2可動体220における爪部223の代わりに、図13〜図15に示すように、ストッパ224の近傍に配設された爪部223Aを採用している。変形例のクラッチ装置における爪部223A以外の構成は、全て実施例のクラッチ装置10と同一である。このため、同一構成については同一の符号を付して説明を省略又は簡略する。
C…回転軸芯
9…駆動源(電動モータ)
110…第1回転体
120…第2回転体
20…切替手段
10…クラッチ装置
α…所定角度
210…第1可動体
H…偏心軸芯
220…第2可動体
50…付勢部材(ねじりコイルばね)
60…制動部材
114…角度規制部
212…偏心部(偏心軸穴)
222…被偏心部(偏心ピン)
223、223A…爪部
224…ストッパ
A…爪部の第2回転体に対する係合位置
B…ストッパの角度規制部に対する当接位置
L1…ストッパの角度規制部に対する当接位置と、偏心軸芯とを結んだ直線
L2…直線L1に直交し、当接位置を通過する直線
L3…直線L1に直交し、偏心軸芯を通過する直線
L4…偏心軸芯と回転軸芯とを結んだ直線
L5…直線L4に直交し、偏心軸芯を通過する直線
113…回転軸穴
111…第1円盤部
112…第1円筒部
119…外歯
121…第2円盤部
122…第2円筒部
124…被係合部
100…内部空間
211…円柱部
216…第1係止部
217…第2係止部
225…第3係止部
50A…ねじりコイルばねの一端
50B…ねじりコイルばねの他端
3…支持軸
213…凸部
214…軸穴
226…スリット
221…平板部
8…出力部
1…アクチュエータ
Claims (8)
- ベース部材と、
前記ベース部材に対して回転軸芯周りに回転可能に支持され、駆動源に回転駆動される第1回転体と、
前記ベース部材に対して前記回転軸芯周りに回転可能に支持され、前記第1回転体に隣接する第2回転体と、
前記第1回転体と前記第2回転体との間に設けられ、前記第1回転体と前記第2回転体とが一体回転する接続状態と、前記第1回転体とは無関係に前記第2回転体が回転可能な遮断状態とを切り替える切替手段とを備えるクラッチ装置であって、
前記切替手段は、前記第1回転体に対して回動角度が初期位置から所定角度までの間に制限されつつ前記回転軸芯周りに回動可能に支持された第1可動体と、
前記第1可動体に対して前記回転軸芯から偏心した偏心軸芯周りに回動可能に支持され、前記第1回転体が前記駆動源に回転駆動されない場合、前記第1可動体が前記初期位置に位置することにより前記回転軸芯に近づいて前記第2回転体から離反する一方、前記第1回転体が前記駆動源に回転駆動されて正方向に回転する場合、前記第1可動体が前記初期位置から回動することにより前記回転軸芯から離れて前記第2回転体に係合する第2可動体と、
前記第1回転体又は前記第2可動体と前記第1可動体との間に設けられ、前記第1可動体を前記初期位置に向かって付勢する付勢部材と、
前記ベース部材に設けられ、前記第1可動体に所定の摩擦力を付与して、前記第1可動体の前記回転軸芯周りの回転を制動し、前記第1回転体に対する前記第1可動体の回り遅れを生じさせる制動部材とを有することを特徴とするクラッチ装置。 - 前記第2可動体は、前記第1回転体が前記駆動源に回転駆動されて逆方向に回転する場合、前記第1可動体が前記初期位置に位置することにより前記回転軸芯に近づいて前記第2回転体から離反する請求項1記載のクラッチ装置。
- 前記第1回転体には、前記第1可動体の回動角度を制限する角度規制部が形成され、
前記第1可動体には、前記偏心軸芯を形成する偏心部が形成され、
前記第2可動体には、前記偏心部と係合する被偏心部と、前記付勢部材によって前記角度規制部と当接するストッパと、前記偏心軸芯及び前記ストッパから離れて設けられ、前記第1回転体が正方向に回転することにより前記角度規制部と摺接する前記ストッパに案内された状態で前記回転軸芯から離れ、前記第2回転体と係合を継続可能な爪部とが形成されている請求項1又は2記載のクラッチ装置。 - 前記爪部が前記第2回転体に係合した場合において、
前記ストッパが前記角度規制部に押されることにより、前記爪部の前記第2回転体に対する係合位置を支点として、前記被偏心部及び前記偏心部が前記回転軸芯周りに前記第1回転体の回転方向と逆方向に付勢されるように構成されている請求項3記載のクラッチ装置。 - 前記爪部が前記第2回転体に係合した場合において、
前記ストッパの前記角度規制部に対する当接位置と、前記偏心軸芯とを結んだ直線をL1とし、前記直線L1に直交し、前記当接位置を通過する直線をL2とし、前記直線L1に直交し、前記偏心軸芯を通過する直線をL3とし、前記偏心軸芯と前記回転軸芯とを結んだ直線をL4とし、前記直線L4に直交し、前記偏心軸芯を通過する直線をL5とすると、
前記回転軸芯は、前記直線L2と前記直線L3とに挟まれる領域に存在し、
前記爪部は、前記直線L4により仕切られる2つの領域のうち、前記偏心軸芯を基準として前記第1回転体の回転方向と逆方向にある領域に存在し、
前記当接位置は、前記直線L5により仕切られる2つの領域のうち、前記回転軸芯がある領域に存在している請求項4記載のクラッチ装置。 - 前記第1回転体は、前記回転軸芯と同軸の回転軸穴が形成された第1円盤部と、前記第1円盤部の外周縁に形成され、前記回転軸芯と同軸に延在する第1円筒部と、前記第1円筒部の外周面に形成された外歯とを有し、
前記第2回転体は、前記第1円盤部と間隔を有して対向する第2円盤部と、前記第2円盤部の外周縁に形成され、前記回転軸芯と同軸に前記第1円筒部に向かって延在する第2円筒部と、前記第2円筒部の内周面に形成され、前記爪部と係合する被係合部とを有し、
前記第1円盤部、前記第1円筒部、前記第2円盤部及び前記第2円筒部により内部空間が区画され、
前記内部空間内には、前記第1円盤部に隣接する前記第1可動体と、前記第1可動体と前記第2円盤部とに挟まれる前記第2可動体と、前記第1可動体に保持される前記付勢部材としてのねじりコイルばねとが収容され、
前記第1円盤部は前記内部空間に向かって前記角度規制部を突出させており、
前記第1可動体には、一面側に延びて前記回転軸穴から突出し、前記制動部材と摺接する円柱部と、他面側に凹設された前記偏心部としての偏心軸穴と、他面側に形成され、前記ねじりコイルばねの一端を係止する第1係止部と、他面側に形成され、前記ねじりコイルばねの他端を係止する第2係止部とが形成され、
前記第2可動体には、前記偏心軸穴に挿入される前記被偏心部としての偏心ピンと、組付時に前記角度規制部と前記第2係止部との間に突出し、前記偏心軸芯周りに回動することにより前記ねじりコイルばねの他端を係止する第3係止部とが形成されている請求項3乃至5のいずれか1項記載のクラッチ装置。 - 前記ベース部材には前記回転軸芯を形成する支持軸が固定され、
前記第1可動体には、前記円柱部の他面側に突出し、前記回転軸芯と同軸の凸部と、前記円柱部から前記凸部まで前記支持軸を挿通させる軸穴とが形成され、
前記第2可動体には、前記回転軸芯に直交する平面に沿う平板形状とされ、前記偏心軸芯周りの回動時に前記支持軸及び前記凸部との干渉を回避するスリットが自己の中央に貫設された平板部が形成されている請求項6記載のクラッチ装置。 - 前記ベース部材に固定される前記駆動源と、
請求項1乃至7のいずれか1項記載のクラッチ装置と、
前記第2回転体の回転に伴って動作する出力部とを備えることを特徴とするアクチュエータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010125567A JP5460468B2 (ja) | 2010-06-01 | 2010-06-01 | クラッチ装置及びアクチュエータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010125567A JP5460468B2 (ja) | 2010-06-01 | 2010-06-01 | クラッチ装置及びアクチュエータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011252524A JP2011252524A (ja) | 2011-12-15 |
| JP5460468B2 true JP5460468B2 (ja) | 2014-04-02 |
Family
ID=45416613
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010125567A Active JP5460468B2 (ja) | 2010-06-01 | 2010-06-01 | クラッチ装置及びアクチュエータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5460468B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6520350B2 (ja) * | 2015-04-23 | 2019-05-29 | 株式会社アンセイ | クラッチ装置及びアクチュエータ |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4659559B2 (ja) * | 2005-08-23 | 2011-03-30 | 三井金属アクト株式会社 | 電動式アクチュエータ |
| JP2010090913A (ja) * | 2008-10-03 | 2010-04-22 | Mitsuba Corp | クラッチ機構およびドアロック駆動装置 |
-
2010
- 2010-06-01 JP JP2010125567A patent/JP5460468B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011252524A (ja) | 2011-12-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102097056B1 (ko) | 차량용 도어 잠금 장치 | |
| US10563434B2 (en) | Locking unit for a motor vehicle | |
| US8757679B2 (en) | Closing device comprising two pawls and a motor-driven actuating mechanism | |
| JP5469789B2 (ja) | 複数の爪部と、バネを備えた爪部とを有するロックユニット | |
| JP4532555B2 (ja) | 自動車用ステアリングスピンドルロック装置 | |
| RU2652580C2 (ru) | Дверной замок транспортного средства | |
| JP5260360B2 (ja) | 電動ステアリングロック装置 | |
| US7263909B2 (en) | Drive device | |
| JP4448512B2 (ja) | 自動車のステアリングシャフトをロックする装置 | |
| US9079517B2 (en) | Dual cam recliner | |
| US20110265586A1 (en) | Glove box actuator | |
| JP5260358B2 (ja) | 電動ステアリングロック装置 | |
| KR101589331B1 (ko) | 중앙 록킹 메커니즘용 블록화된 기능 요소를 포함하는 구동 유니트 | |
| EP0684356B1 (en) | Door lock driving device | |
| JP7121055B2 (ja) | 車両用ドアハンドルアセンブリ | |
| JP5460468B2 (ja) | クラッチ装置及びアクチュエータ | |
| JP5450265B2 (ja) | クラッチ装置及びアクチュエータ | |
| JP3761041B2 (ja) | 電動アクチュエータ | |
| JP2018200773A (ja) | スイッチ機構およびギアードモータ、ならびにダンパ装置 | |
| US20200166131A1 (en) | Parking lock and a transmission having the parking lock | |
| US9827949B2 (en) | Electric steering lock device | |
| JP6937654B2 (ja) | ステアリングロック装置 | |
| CN113904498B (zh) | 一种回转执行器 | |
| CN111379480B (zh) | 门闩锁装置 | |
| US20210102412A1 (en) | Vehicle door lock device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130501 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131218 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140114 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5460468 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |