JP5452040B2 - 光学的情報再生方法、光ヘッドおよび光ディスク装置 - Google Patents
光学的情報再生方法、光ヘッドおよび光ディスク装置 Download PDFInfo
- Publication number
- JP5452040B2 JP5452040B2 JP2009060420A JP2009060420A JP5452040B2 JP 5452040 B2 JP5452040 B2 JP 5452040B2 JP 2009060420 A JP2009060420 A JP 2009060420A JP 2009060420 A JP2009060420 A JP 2009060420A JP 5452040 B2 JP5452040 B2 JP 5452040B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- optical
- path length
- optical path
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
















Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/004—Recording, reproducing or erasing methods; Read, write or erase circuits therefor
- G11B7/005—Reproducing
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/08—Disposition or mounting of heads or light sources relatively to record carriers
- G11B7/09—Disposition or mounting of heads or light sources relatively to record carriers with provision for moving the light beam or focus plane for the purpose of maintaining alignment of the light beam relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following
- G11B7/0941—Methods and circuits for servo gain or phase compensation during operation
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/12—Heads, e.g. forming of the optical beam spot or modulation of the optical beam
- G11B7/135—Means for guiding the beam from the source to the record carrier or from the record carrier to the detector
- G11B7/1359—Single prisms
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B2007/0003—Recording, reproducing or erasing systems characterised by the structure or type of the carrier
- G11B2007/0009—Recording, reproducing or erasing systems characterised by the structure or type of the carrier for carriers having data stored in three dimensions, e.g. volume storage
- G11B2007/0013—Recording, reproducing or erasing systems characterised by the structure or type of the carrier for carriers having data stored in three dimensions, e.g. volume storage for carriers having multiple discrete layers
Landscapes
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Optical Head (AREA)
- Optical Recording Or Reproduction (AREA)
Description
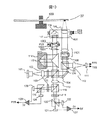
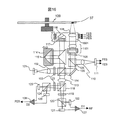
次に、光ヘッド2001の内部構成およびその機能について説明する。以下に説明する光ヘッド系を構成する各光学素子は、光学モジュールとして一体形成されている。本実施例の光ヘッド光学系は、レーザ光から放出された光を光ディスクに導き反射させ、当該反射光と参照信号とを干渉させて干渉光を生成するための干渉光学系と、生成された干渉光を分離し、分離された各々の干渉光に位相差を付与して複数の検出器で検出するための検出光学系とにより構成される。

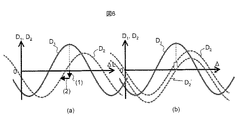
次に、光の干渉によって増幅信号と位相誤差信号を得る過程を詳細に説明する。まず、光学系が理想的な状態にある場合を考える。集光レンズ113に入射する光は、水平偏光であるコーナーキューブプリズム116からの戻り光と、垂直偏光である光ディスク109からの戻り光が同軸になったものである。従って光の偏光状態をジョーンズベクトルで表すと
なお、本方式の出力(式14)の二乗を再生信号として扱っても良い。これにより、DVDやブルーレイディスクのような従来の光ディスク信号と同じく、信号光強度に比例した再生信号出力となるため、従来の信号処理系を用いることができる。
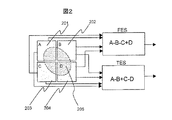
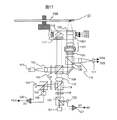
なお、ここで位相差とは、位相板において発生する水平偏光成分の位相に対する、垂直偏光成分の位相の符号付き大きさである。また、各検出器上での光量が等しくなるように、無偏光ビームスプリッタ701は透過率と反射率の比が1対2に、無偏光ビームスプリッタ702は透過率と反射率が等しくなるようなものを使用する。
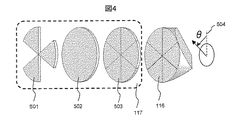
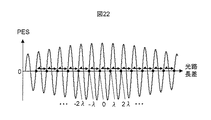
例としてくさび型プリズム1001,1002の傾斜角(定義は図11参照)θ=15度、媒質BK7、光源波長λ=405nmとしたとき、位相誤差信号の最大値と最小値の間に対応する光路長差λ/2発生させるのに必要なくさび型プリズムの移動距離は10μmとなる(図12参照)。これは通常の焦点ずれ信号のS字信号の最大値、最小値間の対物レンズの移動量と同程度である。
デジタル再生信号Sは、適当なデジタル等化処理の後、復調回路24やアドレス検出回路23に入力され、復号回路26によって、ユーザデータとして、メモリ29やマイクロプロセッサ27に送られる。マイクロプロセッサは、上位装置99からの指示によって、サーボ回路79や自動位置制御手段76を制御し、任意のアドレスに光スポット37を位置づける。マイクロプロセッサ27は上位装置からの指示が再生か記録かによって、レーザドライバ28を制御し、レーザ101を適当なパワー/波形で発光させる。また、ビームエキスパンダ1101,可動部114を光軸方向に動かし、信号品質が最も良くなる位置に固定する。サーボ回路79は、焦点ずれ信号、トラックずれ信号に基づき2次元アクチュエータ107を制御し、光ディスク109の記録面に集光され、記録トラックを追従するようにする。また、差動回路128より生成される位相誤差信号に基づきピエゾ素子801を制御し、干渉位相がゼロになるようにする。
Claims (13)
- 光源から出射された光束を分割し、
当該分割された光束の一方を光情報記録媒体に照射することにより得られる信号光と前記分割された光束の他方から得られる参照光とを光学的に干渉させることにより干渉光を形成し、
当該干渉光を複数の検出器に光学的な位相関係が互いに異なる状態で導き、
前記複数の検出器の出力から再生信号を取得する光学的情報再生方法であって、
前記光情報記録媒体の位置変動に伴う、前記信号光と前記参照光の光路長差の変動を打ち消す光路長差粗調整と、
前記干渉光を検出する前記複数の検出器の出力から生成した位相誤差信号に基づいて、前記光路長差の微調整を行う光路長差微調整と、
を行うことを特徴とする光学的情報再生方法。 - 請求項1に記載の光学的情報再生方法において、
前記光路長差微調整においては、
前記位相誤差信号を光路長差変化手段に入力して閉ループ制御することにより実行されることを特徴とする光学的情報再生方法。 - 請求項2に記載の光学的情報再生方法において、
位相ジャンプ信号を前記光路長差変化手段に入力し、前記閉ループ制御を行ったまま、前記光源の発光波長の整数倍だけ光路長差を可変調整することを特徴とする光学的情報再生方法。 - 光源から出射された光束を第1の光束および第2の光束に分割し、当該第1の光束を光情報記録媒体に照射することにより得られる信号光と、当該第2の光束から得られる参照光とを光学的に干渉させることにより干渉光を形成し、当該干渉光を複数の検出器に光学的な位相関係が互いに異なる状態で導く機能を備えた光学モジュールを備えた光ヘッドにおいて、
前記光学モジュールが、
前記光情報記録媒体の位置変動に伴う、前記信号光と前記参照光の光路長差の変動を打ち消す、光路長差の粗調整を行う第1の光路長差変化手段と、
前記干渉光を検出する前記複数の検出器の出力から生成した位相誤差信号に基づいて、前記光路長差の微調整を行う第2の光路長差変化手段とを備えたことを特徴とする光ヘッド。 - 請求項4に記載の光ヘッドにおいて、
前記光路長差の固定位置を調整する第3の光路長差変化手段とを備えたことを特徴とする光ヘッド。 - 請求項5に記載の光ヘッドにおいて、
前記第3の光路長差変化手段により、前記参照光と信号光の光路長差がゼロになるように前記参照光と信号光との光路長差が調整され、
前記第2の光路長差変化手段により、前記参照光と信号光の位相差が所定の閾値以下になるように前記光路差が調整されることを特徴とする光ヘッド。 - 請求項5に記載の光ヘッドにおいて、
前記第2の光路長差変化手段と、前記第3の光路長差変化手段とが同一の可動部により構成されることを特徴とする光ヘッド。 - 請求項5に記載の光ヘッドにおいて、
前記第1の光路長差変化手段と、前記第2の光路長差変化手段と、前記第3の光路長差変化手段とが同一の可動部により構成されることを特徴とする光ヘッド。 - 請求項4に記載の光ヘッドにおいて、
前記光学モジュールは、
前記第1の光束を前記光情報記録媒体に集光して照射し、当該光情報記録媒体から反射される反射光を受光する対物レンズと、
前記第2の光束の光路中に設けられ、前記第2の光束を参照光として反射させる参照光反射手段とを有し、
前記対物レンズと、前記参照光反射手段とが前記可動部に搭載されていることを特徴とする光ヘッド。 - 請求項4に記載の光ヘッドにおいて、
前記複数の検出器の個数は4つであって、
それぞれの検出器に入射される光の干渉位相が互いに90度の整数倍だけ異なり、
前記再生信号は入射する光の干渉位相が互いに180度異なる2つの検出器の差動信号であり、
前記位相誤差信号は残りの2つの検出器の間の差動信号であることを特徴とする光ヘッド。 - 請求項10に記載の光ヘッドにおいて、
前記光学モジュールは、
無偏光光束分割素子と、
1つまたは複数の波長板と、
複数の偏光分離素子とを備えた干渉光学系を有し、
前記無偏光分割素子が光束を分割する比率が1対1でないことを特徴とする光ヘッド。 - 請求項4に記載の光ヘッドにおいて、
前記複数の検出器の出力から位置誤差信号を生成するための論理回路素子と、
前記光情報記録媒体からの戻り光の平均光量をモニタする総光量検出器と、
前記総光量検出器の出力値で前記位相誤差信号に対する規格化演算を実行する除算回路とを有することを特徴とする光ヘッド。 - 請求項12に記載の光ヘッドにおいて、
前記総光量検出器は、焦点ずれ信号を生成する検出器であることを特徴とする光ヘッド。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009060420A JP5452040B2 (ja) | 2009-03-13 | 2009-03-13 | 光学的情報再生方法、光ヘッドおよび光ディスク装置 |
| PCT/JP2010/053387 WO2010103962A1 (ja) | 2009-03-13 | 2010-03-03 | 光学的情報再生方法、光ヘッドおよび光ディスク装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009060420A JP5452040B2 (ja) | 2009-03-13 | 2009-03-13 | 光学的情報再生方法、光ヘッドおよび光ディスク装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010218591A JP2010218591A (ja) | 2010-09-30 |
| JP2010218591A5 JP2010218591A5 (ja) | 2011-10-06 |
| JP5452040B2 true JP5452040B2 (ja) | 2014-03-26 |
Family
ID=42728252
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009060420A Expired - Fee Related JP5452040B2 (ja) | 2009-03-13 | 2009-03-13 | 光学的情報再生方法、光ヘッドおよび光ディスク装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP5452040B2 (ja) |
| WO (1) | WO2010103962A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5309008B2 (ja) | 2009-12-15 | 2013-10-09 | 日立コンシューマエレクトロニクス株式会社 | 光情報記録再生装置および光情報再生装置 |
| JP5409479B2 (ja) | 2010-03-29 | 2014-02-05 | 日立コンシューマエレクトロニクス株式会社 | 光情報再生装置、光情報記録装置及び情報記録方法 |
| JP5358530B2 (ja) * | 2010-07-28 | 2013-12-04 | 日立コンシューマエレクトロニクス株式会社 | 光情報記録再生装置及び再生装置 |
| JP2012069189A (ja) * | 2010-09-22 | 2012-04-05 | Sony Corp | 再生装置、光路長サーボ制御方法 |
| JP2012174290A (ja) * | 2011-02-17 | 2012-09-10 | Hitachi Media Electoronics Co Ltd | 光ピックアップ装置および光ディスク装置 |
| JP5758728B2 (ja) | 2011-07-26 | 2015-08-05 | 株式会社日立ハイテクノロジーズ | 荷電粒子線装置 |
| JP2013033572A (ja) * | 2011-08-03 | 2013-02-14 | Sony Corp | 光ピックアップ装置、再生装置 |
| WO2014188532A1 (ja) * | 2013-05-22 | 2014-11-27 | 日立コンシューマエレクトロニクス株式会社 | 光情報再生装置 |
| WO2016120924A1 (ja) * | 2015-01-30 | 2016-08-04 | ソニー株式会社 | 再生装置および再生方法 |
| JP7017985B2 (ja) | 2018-06-05 | 2022-02-09 | 株式会社日立製作所 | システム及び処理条件の決定方法 |
| CN109089113B (zh) * | 2018-10-12 | 2019-09-10 | 四川长虹电器股份有限公司 | 一种平板电视的自动进行重显率调整的方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007317284A (ja) * | 2006-05-25 | 2007-12-06 | Hitachi Ltd | 光ディスク装置 |
| JP4564948B2 (ja) * | 2006-09-11 | 2010-10-20 | 株式会社日立製作所 | 光情報検出方法、光ヘッド及び光ディスク装置 |
| JP4861948B2 (ja) * | 2007-02-23 | 2012-01-25 | 株式会社日立製作所 | 光ヘッドおよび光ディスク装置 |
| JP2008243273A (ja) * | 2007-03-27 | 2008-10-09 | Hitachi Ltd | 光ヘッド及び光情報記録媒体の再生方法 |
| JP2008269680A (ja) * | 2007-04-18 | 2008-11-06 | Hitachi Ltd | 光ヘッドおよび光ディスク装置 |
| JP5153424B2 (ja) * | 2008-04-11 | 2013-02-27 | 株式会社日立製作所 | 光ヘッド及び光ディスク装置 |
-
2009
- 2009-03-13 JP JP2009060420A patent/JP5452040B2/ja not_active Expired - Fee Related
-
2010
- 2010-03-03 WO PCT/JP2010/053387 patent/WO2010103962A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| WO2010103962A1 (ja) | 2010-09-16 |
| JP2010218591A (ja) | 2010-09-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5452040B2 (ja) | 光学的情報再生方法、光ヘッドおよび光ディスク装置 | |
| JP5153424B2 (ja) | 光ヘッド及び光ディスク装置 | |
| JP5081763B2 (ja) | 光情報検出方法、光ピックアップ及び光情報記録再生装置 | |
| JP4861948B2 (ja) | 光ヘッドおよび光ディスク装置 | |
| JP4564948B2 (ja) | 光情報検出方法、光ヘッド及び光ディスク装置 | |
| JP2008269680A (ja) | 光ヘッドおよび光ディスク装置 | |
| JP2007317284A (ja) | 光ディスク装置 | |
| JP5043049B2 (ja) | 光学的情報再生方法及び光ディスク装置 | |
| US7764576B2 (en) | Optical information recording and reproducing apparatus | |
| JP2007193894A (ja) | 光記録再生装置、光学ピックアップ及びトラッキングエラー信号検出方法 | |
| JP5417269B2 (ja) | 光情報再生装置 | |
| US20080267019A1 (en) | Optical Pickup Apparatus and Optical Disk Drive | |
| JP2008243273A (ja) | 光ヘッド及び光情報記録媒体の再生方法 | |
| US20120008483A1 (en) | Optical head and optical disc apparatus | |
| JP4449819B2 (ja) | 光再生方法、波形等化方法及び光記録再生装置 | |
| JP6158339B2 (ja) | ホログラム再生装置、ホログラム再生方法 | |
| JP5780932B2 (ja) | 光情報記録再生装置、光情報記録装置 | |
| JP2007323791A (ja) | 光情報記録再生装置 | |
| JP5468033B2 (ja) | 光情報再生装置及び光情報記録再生装置 | |
| US20070297731A1 (en) | Optical pick-up | |
| JP2007250034A (ja) | 光ピックアップ用受光素子の位置調整方法 | |
| JP2010211842A (ja) | 光ピックアップ、光学的情報再生装置および光学的情報記録再生装置 | |
| JP5778624B2 (ja) | 光情報再生装置及び光情報再生方法 | |
| WO2013183439A1 (ja) | 光ピックアップ装置 | |
| WO2012169286A1 (ja) | 光情報記録再生装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110818 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110818 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20130529 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130924 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131007 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131203 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131227 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |