JP5445191B2 - ロボットの動作軌跡表示装置 - Google Patents
ロボットの動作軌跡表示装置 Download PDFInfo
- Publication number
- JP5445191B2 JP5445191B2 JP2010025366A JP2010025366A JP5445191B2 JP 5445191 B2 JP5445191 B2 JP 5445191B2 JP 2010025366 A JP2010025366 A JP 2010025366A JP 2010025366 A JP2010025366 A JP 2010025366A JP 5445191 B2 JP5445191 B2 JP 5445191B2
- Authority
- JP
- Japan
- Prior art keywords
- approach
- robot
- point
- object surface
- points
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000013459 approach Methods 0.000 claims description 373
- 230000033001 locomotion Effects 0.000 claims description 185
- 238000005070 sampling Methods 0.000 claims description 114
- 230000003287 optical effect Effects 0.000 claims description 37
- 238000013500 data storage Methods 0.000 claims description 24
- 230000009467 reduction Effects 0.000 claims description 12
- 238000000034 method Methods 0.000 description 61
- 230000008569 process Effects 0.000 description 57
- 230000008859 change Effects 0.000 description 13
- 238000010586 diagram Methods 0.000 description 13
- 239000003086 colorant Substances 0.000 description 6
- 238000007726 management method Methods 0.000 description 4
- 230000036544 posture Effects 0.000 description 2
- 230000003466 anti-cipated effect Effects 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000008719 thickening Effects 0.000 description 1
Images
































Landscapes
- Manipulator (AREA)
Description
以下、本発明の第1の実施形態について図1乃至図26を参照して説明する。尚、本実施形態では特定箇所の動作軌跡を表示する対象を例えば6軸の垂直多関節型ロボットとして説明するが、別型のロボットであっても良い。ロボットの動作軌跡表示装置としてのシミュレータは、図1に示すように、パーソナルコンピュータ(以下、パソコンと称する)1を主体として構成されている。パソコン1は、パソコン本体2に、出力装置としての例えば3次元のグラフィック表示が可能な液晶ディスプレイ装置からなる表示装置3(本発明でいう表示手段)が接続されていると共に、入力装置としての例えばキーボード4及びマウス5が接続されて構成されている。
CPU6は、接近判定処理から移行して接近点存在判定処理を開始すると、ロボットの動作開始から動作終了までに追従したロボットの手先の動作軌跡の始点から終点までを接近判定対象区間として設定し、一定時間間隔(サンプリング間隔)であるサンプリング点毎に物体表面までの距離が一定距離以下である接近点が存在するか否かを判定する処理を開始する(ステップS11)。尚、サンプリング間隔は作業者が任意に設定可能(選択可能)となっている。
CPU6は、接近点存在判定処理を実行したことで物体表面上に接近点が存在すると判定し、接近判定処理から移行して接近領域表示処理を開始すると、接近点存在判定処理にて保存した接近点データに基づいて物体表面図形に接近領域を表示させる処理を開始する(ステップS31)。CPU6は、最初に接近点存在判定処理にて特定した接近サンプリング点のうちロボットの動作開始位置(始点)側の接近サンプリング点を判定対象として設定し(ステップS32)、その判定対象として設定した接近サンプリング点にて保存されている接近点データを取得する(ステップS33)。
CPU6は、接近判定処理から移行して矢印表示処理を開始すると、物体表面図形に矢印を表示させる処理を開始する(ステップS51)。CPU6は、接近領域表示処理にて特定した何れかのグループを判定対象として設定し(ステップS52)、判定対象として設定したグループに存在する接近点のうちサンプリング点からの距離が最短である接近点を最接近点として特定し、その特定した最接近点に対応するサンプリング点を最接近サンプリングとして特定する(ステップS53)。次いで、CPU6は、物体表面図形に最接近サンプリングから最接近点まで矢印を表示させる。次いで、CPU6は、今回の判定対象としたグループで形成された接近領域が他のグループで形成された接近領域と重複するか否かを判定する(ステップS54)。
次に、本発明の第2の実施形態について、図27乃至図33を参照して説明する。尚、第1の実施形態と同一部分については説明を省略して異なる部分について説明する。第2の実施形態はロボットの手先の動作軌跡を動画により表示することを特徴とする。
再生速度=基準再生速度/(表示倍率/100)
となり、このように再生速度と表示倍率とが反比例する演算式によれば、拡縮率を変更する前でのロボットが画面に現れてから消えるまでの時間と、拡縮率を変更した後でのロボットが画面に現れてから消えるまでの時間とが略同じになるので、拡縮率を変更したとしても作業者が確認に要する時間が変わることがなく、作業性を高めることができる。
本発明は、上記した実施形態にのみ限定されるものではなく、以下のように変形又は拡張することができる。
動作軌跡を表示する部位はロボットの手先に限らず関節等であっても良い。
最接近サンプリング点から最接近点まで矢印を表示させる処理は必要に応じて実行しても良い。
物体表面図形に接近点が含まれる領域と接近点が含まれない領域とを区分する方法として、両者の色を異ならせることに限らず、接近点が含まれる領域だけを例えば点滅表示させる等しても良く、別の方法を用いても良い。
接近判定処理プログラムをCD−ROM、DVD−ROM、DVD−RAM、USBメモリ等の記録媒体に記録させ、それらの記録媒体からパソコン1が接近判定処理プログラムを読出して実行するようにしても良い。
6はCPU(表示制御手段、ベクトル生成手段、接近判定手段、接近点特定手段、接近サンプリング点特定手段、最接近点特定手段、最接近サンプリング点特定手段、グループ化手段、重複判定手段、跨り判定手段)、9はハードディスク(動作軌跡データ記憶手段、物体表面図形データ記憶手段)、42はCPU(表示制御手段、ベクトル生成手段、接近判定手段、接近点特定手段、接近サンプリング点特定手段、最接近点特定手段、最接近サンプリング点特定手段、グループ化手段、重複判定手段、跨り判定手段、再生区間設定手段、動画拡縮率設定手段、再生速度設定手段)、43はハードディスク(動作軌跡データ記憶手段、物体表面図形データ記憶手段)、45は全体ビューウィンドウ(動作軌跡表示画面)、46は動画ビューウィンドウ(動画再生表示画面)である。
Claims (7)
- ロボットの特定箇所の動作軌跡を特定可能な動作軌跡データを記憶可能な動作軌跡データ記憶手段と、
ロボットの動作を妨げ得る物体表面の位置及び形状を特定する物体表面図形を特定可能な物体表面図形データを記憶可能な物体表面図形データ記憶手段と、
前記動作軌跡データ記憶手段に記憶されている動作軌跡データにより特定されるロボットの特定箇所の動作軌跡と、前記物体表面図形データ記憶手段に記憶されている物体表面図形データにより特定される物体表面図形とを同一画面上に含む動作軌跡表示画面を表示手段に表示させる表示制御手段と、
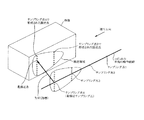
ロボットの特定箇所の動作軌跡上において一定時間間隔で取得されるサンプリング点毎に、各サンプリング点を基点として当該サンプリング点から当該動作軌跡と直交する面方向に一定距離に延びるベクトルを周方向に一定角度で段階的に進めて放射状に複数生成するベクトル生成手段と、
前記ベクトル生成手段により生成されたベクトルと、前記物体表面図形データ記憶手段に記憶されている物体表面図形データとを照合し、ベクトルと物体表面とが交差するか否かを判定し、ロボットの特定箇所の動作軌跡が物体表面まで一定距離以下に接近するか否かを判定する接近判定手段と、
ロボットの特定箇所の動作軌跡が物体表面まで一定距離以下に接近すると前記接近判定手段により判定された場合に、ロボットの特定箇所の動作軌跡からの距離が一定距離以下である物体表面上の点を接近点として特定する接近点特定手段と、
前記接近点特定手段により接近点が特定されたサンプリング点を接近サンプリング点として特定する接近サンプリング点特定手段と、を備え、
前記表示制御手段は、物体表面図形にて前記接近点特定手段により特定された接近点が含まれる領域である接近領域と当該接近点が含まれない領域である非接近領域とを区分して前記動作軌跡表示画面に表示させることを特徴とするロボットの動作軌跡表示装置。 - 請求項1に記載したロボットの動作軌跡表示装置において、
前記接近点特定手段により複数の接近点が特定された場合に、複数の接近点のうち接近サンプリング点からの距離が最短である接近点を最接近点として特定する最接近点特定手段と、
前記最接近点特定手段により最接近点が特定された接近サンプリング点を最接近サンプリング点として特定する最接近サンプリング点特定手段と、を備え、
前記表示制御手段は、物体表面図形にて前記最接近サンプリング点特定手段により特定された最接近サンプリング点から前記最接近点特定手段により特定された最接近点までの距離及び方向を特定する指標を前記動作軌跡表示画面に表示させることを特徴とするロボットの動作軌跡表示装置。 - 請求項1又は2に記載したロボットの動作軌跡表示装置において、
前記接近点特定手段により複数の接近点が特定された場合に、複数の接近点のうち隣り合う接近点同士を同一グループとする一方で隣り合わない接近点同士を別グループとするようにグループ化するグループ化手段を備え、
前記表示制御手段は、複数の接近点のうち隣り合う接近点同士が同一グループとされる一方で隣り合わない接近点同士が別グループとされるように前記グループ化手段によりグループ化されて複数のグループが生成された場合に、物体表面図形にて前記複数のグループのうち一のグループに属する接近点が含まれる領域である一の接近領域と他のグループに属する接近点が含まれる領域である他の接近領域とを区分して前記動作軌跡表示画面に表示させることを特徴とするロボットの動作軌跡表示装置。 - 請求項3に記載したロボットの動作軌跡表示装置において、
複数の接近点のうち隣り合う接近点同士が同一グループとされる一方で隣り合わない接近点同士が別グループとされるように前記グループ化手段によりグループ化されて複数のグループが生成された場合に、複数のグループに跨って重複する接近点が存在するか否かを判定する重複判定手段を備え、
前記表示制御手段は、複数のグループに跨って重複する接近点が存在すると前記重複判定手段により判定された場合に、重複する接近点が含まれる領域と重複する接近点が含まれない領域とを区分して前記動作軌跡表示画面に表示させることを特徴とするロボットの動作軌跡表示装置。 - 請求項1乃至4の何れかに記載したロボットの動作軌跡表示装置において、
前記接近点特定手段により特定された隣り合う接近点同士が同一の物体表面図形にて一の表面上と他の表面上とに跨って存在するか否かを判定する跨り判定手段を備え、
前記表示制御手段は、隣り合う接近点同士が同一の物体表面図形にて一の表面上と他の表面上とに跨って存在すると前記跨り判定手段により判定された場合に、隣り合う接近点同士が含まれる領域を一の表面上と他の表面上とに跨って前記動作軌跡表示画面に表示させることを特徴とするロボットの動作軌跡表示装置。 - 請求項1乃至5の何れかに記載したロボットの動作軌跡表示装置において、
前記表示手段は、ロボットの特定箇所の動作軌跡と物体表面図形とを同一画面上に含む動作軌跡表示画面と、ロボットの特定箇所の動作軌跡を動画再生する動画再生表示画面とを同時に表示可能に構成され、
前記接近点特定手段により特定された接近点が含まれる領域である接近領域のうち前記動作軌跡表示画面の最も中央側で且つ光軸の最も手前側に表示されている接近領域に対応するロボットの特定箇所の動作軌跡を再生区間として設定する再生区間設定手段と、
前記動画再生表示画面に表示されている動画の拡縮率を設定する動画拡縮率設定手段と、
前記動画拡縮率設定手段により設定された拡縮率に反比例するように動画の再生速度を設定する再生速度設定手段とを備え、
前記表示制御手段は、前記再生区間設定手段により再生区間として設定されたロボットの特定箇所の動作軌跡の動画を、前記動画拡縮率設定手段により設定された拡縮率に反比例するように前記再生速度設定手段により設定された再生速度で前記動画再生表示画面に表示させることを特徴とするロボットの動作軌跡表示装置。 - 請求項6に記載したロボットの動作軌跡表示装置において、
前記表示制御手段は、前記再生区間設定手段により再生区間として設定されたロボットの特定箇所の動作軌跡の動画を、前記動作軌跡表示画面の光軸と同一の光軸を有する視点、前記接領域と直交する光軸を有する視点、前記接近領域と平行で且つ動作軌跡と当該接近領域との中間に位置する光軸を有する視点の順序にしたがって前記動画再生表示画面に表示させることを特徴とするロボットの動作軌跡表示装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010025366A JP5445191B2 (ja) | 2010-02-08 | 2010-02-08 | ロボットの動作軌跡表示装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010025366A JP5445191B2 (ja) | 2010-02-08 | 2010-02-08 | ロボットの動作軌跡表示装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011161549A JP2011161549A (ja) | 2011-08-25 |
| JP5445191B2 true JP5445191B2 (ja) | 2014-03-19 |
Family
ID=44592847
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010025366A Active JP5445191B2 (ja) | 2010-02-08 | 2010-02-08 | ロボットの動作軌跡表示装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5445191B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013099815A (ja) * | 2011-11-08 | 2013-05-23 | Fanuc Ltd | ロボットプログラミング装置 |
| JP5426719B2 (ja) | 2012-05-18 | 2014-02-26 | ファナック株式会社 | ロボットシステムの動作シミュレーション装置 |
| JP6024723B2 (ja) * | 2013-09-30 | 2016-11-16 | キヤノンマーケティングジャパン株式会社 | 情報処理装置、その制御方法、及びプログラム |
| JP6350037B2 (ja) * | 2014-06-30 | 2018-07-04 | 株式会社安川電機 | ロボットシミュレータおよびロボットシミュレータのファイル生成方法 |
| JP6589604B2 (ja) * | 2015-12-01 | 2019-10-16 | 株式会社デンソーウェーブ | ティーチング結果表示システム |
| WO2017103997A1 (ja) * | 2015-12-15 | 2017-06-22 | 株式会社安川電機 | ロボットシミュレーション装置、ロボットシミュレーション方法、ロボットシミュレーションプログラムおよびロボット |
| JP6743453B2 (ja) * | 2016-03-30 | 2020-08-19 | セイコーエプソン株式会社 | ロボット制御装置、ロボットおよびシミュレーション装置 |
| JP6838028B2 (ja) * | 2018-10-31 | 2021-03-03 | ファナック株式会社 | 自動プログラム修正装置および自動プログラム修正方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2678005B2 (ja) * | 1988-03-04 | 1997-11-17 | ファナック株式会社 | ロボットの干渉チェック方法 |
| JPH0511843A (ja) * | 1991-07-05 | 1993-01-22 | Fujitsu Ltd | ロボツトの軌道作成方法 |
| JPH08108383A (ja) * | 1994-10-05 | 1996-04-30 | Fujitsu Ltd | マニピュレータ制御装置 |
| JP2003103491A (ja) * | 2001-09-28 | 2003-04-08 | Honda Motor Co Ltd | ロボットの相互干渉検証方法および相互干渉表示パターン |
| JP2004082313A (ja) * | 2002-08-29 | 2004-03-18 | Nachi Fujikoshi Corp | ロボットの動作シミュレーションモデルの作成装置 |
| JP2005081445A (ja) * | 2003-09-04 | 2005-03-31 | Fanuc Ltd | ロボットの干渉領域確認装置 |
| JP4836458B2 (ja) * | 2005-01-07 | 2011-12-14 | 株式会社神戸製鋼所 | 動作プログラムの作成方法 |
| JP2009190113A (ja) * | 2008-02-13 | 2009-08-27 | Fanuc Ltd | ロボットシミュレーション装置 |
-
2010
- 2010-02-08 JP JP2010025366A patent/JP5445191B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011161549A (ja) | 2011-08-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5445191B2 (ja) | ロボットの動作軌跡表示装置 | |
| JP7414919B2 (ja) | シミュレータ装置及びシミュレーション方法 | |
| JP5087532B2 (ja) | 端末装置、表示制御方法および表示制御プログラム | |
| US10747389B2 (en) | Display of three-dimensional model information in virtual reality | |
| JP6303772B2 (ja) | 入力制御装置、制御方法および制御プログラム | |
| CN104070265A (zh) | 焊缝信息设定装置、程序、自动示教系统以及焊缝信息设定方法 | |
| US20220395985A1 (en) | Information processing apparatus, information processing method, display apparatus, display method, robot system, article production method, program, and storage medium | |
| CN111487946A (zh) | 机器人系统 | |
| JP5134409B2 (ja) | プレゼンテーションシステム | |
| US6346941B1 (en) | Interference check result displaying method and interference check result displaying apparatus as well as computer-readable recording medium having interference check result displaying program recorded thereon | |
| JP4458886B2 (ja) | 複合現実感画像の記録装置及び記録方法 | |
| JP4756899B2 (ja) | 情報処理装置、情報処理方法 | |
| KR100297564B1 (ko) | 정보처리장치 | |
| JP6075821B2 (ja) | 画像再生装置、その制御方法、およびプログラム | |
| JP6373710B2 (ja) | 図形処理装置および図形処理プログラム | |
| JP7596844B2 (ja) | 処理装置、処理方法およびプログラム | |
| JP6526851B2 (ja) | 図形処理装置および図形処理プログラム | |
| JP3591876B2 (ja) | 図形処理装置及び方法 | |
| JP6972647B2 (ja) | 三次元形状データの編集装置、及び三次元形状データの編集プログラム | |
| US20210125388A1 (en) | Image processing apparatus and method, and program | |
| JP3732174B2 (ja) | 3次元立体配置編集方法及び3次元立体配置編集装置 | |
| JP4200960B2 (ja) | 編集装置及び編集方法並びにプログラム | |
| JP2001060273A (ja) | 生成装置および動作データ編集装置 | |
| JP2007272925A (ja) | 干渉チェック結果表示方法および干渉チェック結果表示装置ならびに干渉チェック結果表示プログラムが記録されたコンピュータ読取可能な記録媒体 | |
| JP4204874B2 (ja) | 画像表示装置、画像表示装置の画像表示方法、プログラムおよび記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130109 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131126 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131209 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5445191 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |