JP5383535B2 - 位置と負荷の検出可能な流体圧アクチュエータ - Google Patents
位置と負荷の検出可能な流体圧アクチュエータ Download PDFInfo
- Publication number
- JP5383535B2 JP5383535B2 JP2010019937A JP2010019937A JP5383535B2 JP 5383535 B2 JP5383535 B2 JP 5383535B2 JP 2010019937 A JP2010019937 A JP 2010019937A JP 2010019937 A JP2010019937 A JP 2010019937A JP 5383535 B2 JP5383535 B2 JP 5383535B2
- Authority
- JP
- Japan
- Prior art keywords
- rod
- piston
- fluid pressure
- spring
- magnet
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Force Measurement Appropriate To Specific Purposes (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Actuator (AREA)
Description
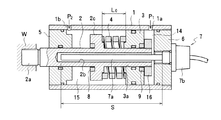
以下に、本発明の好ましい実施例を図面を参照して説明する。図1,図2は本発明に係る流体圧アクチュエータの第1実施例を示し、図1は初期時、図2は作動時を示す。
ΔL∝A1×(P1−P2) ・・・(1)
となる。ここで、(1)式の比例定数(スプリングのばね定数)は予め求めておく。一方、スプリング4の圧縮量ΔLは、上述のように変位センサ7が検出した時間差(t2−t1)の変化によって求めることができる。
Fd=A1×(P1−P2)+A3×P1 ・・・(2)
となる。
Fs=A1×P1+A3×P1
=(A1+A3)P1 ・・・(3)
となる。(1)式でP2=0にすると、スプリング4の圧縮量から圧力P1が分り、その圧力P1を用いて(3)式から負荷Fsを求めることができる(なお、A1,A2,A3等は既知である)。
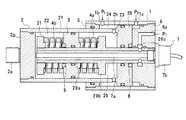
図7は本発明にかかる流体圧アクチュエータの第2実施例を示す。第1実施例では定常状態での負荷制御を例にして説明したが、シリンダのロッドが動いている時、換言するとロッドの動的制御の最中では、P2がゼロ(又は大気圧)であるとは限らない。図1の場合は、第1,第2ポートの有効受圧面積が異なり、第1ポート側ではA1+A3、第2ポート側ではA2(もしくはA1)である。(1)式に見るように、スプリング4の圧縮量は差圧(P1−P2)に比例するので、両ポートの圧力P1とP2の有効受圧面積を同じにするのが望まれる。
P1側・・・A1+A3
P2側・・・A1+A2
となって、A2=A3になるように図7に示す各部の寸法を決めれば、P1とP2側の有効受圧面積を同じにすることが可能となる。アクチュエータが動的な状態、静的な状態のいずれでも、常にスプリング4の圧縮量に比例した負荷が工作物(図示せず)に作用する。
Fd=A0(P1−P2) ・・・(4)
となり、スプリング4の圧縮量が分れば、(1)式から(P1−P2)が分り、次に(4)式からアクチュエータの出力する力が、アクチュエータの状態が動的であろうと静的であろうと、明らかになる。
図8は、前記のようにスプリング4を引張り状態でも有効に力が検出できる方法ではなく、スプリング4を常に圧縮状態で同じ目的を果たそうとするものである。そのために、第2ピストン3を間にしてその両側に2個のスプリング4aと4bを配置したものである。一方のスプリング4aは、第2ピストン3とガイドパイプ20のフランジ部20bとの間に配置され、他方のスプリング4bは第2ピストン3とガイドパイプ20の先端に固定されたストッパ21との間に配置される。その他の構造は第2実施例と同様であるため、同一番号を付して重複説明を省略する。
2 ロッド
2a 操作部
2b 空洞部
2c フランジ部
3 ピストン(第2ピストン)
4 スプリング
5 フロントキャップ
6 エンドキャップ
7 磁歪式変位センサ
7a 検出部
7b 本体部
8,9 マグネット
10 コントローラ
11 流体圧源
12,13 流量制御弁
16 ストッパ
20 ガイドパイプ
21 ストッパ
25 第1ピストン
73 磁歪線
74 受信器
Claims (4)
- シリンダと、
前記シリンダ内を摺動し、中心部に貫通孔を有するピストンと、
前記ピストンの貫通孔を摺動自在に貫通し、一端部が前記シリンダの一端部を閉じるエンドキャップ部を貫通して外部に突出し、内部に他端側へ開口する空洞部を有するロッドと、
前記ロッドの空洞部に挿入され、前記ロッドの軸線方向に延びる磁歪線を有する磁歪式変位センサと、
前記ロッド及びピストンに、前記変位センサの有効検出ストローク範囲内となるようにそれぞれ固定された第1と第2のマグネットと、
前記ピストンとロッドとの間に配置され、前記ピストンに加わる流体圧を前記ロッドに軸方向力として伝え、変位に応じたばね力を発生するスプリングと、を備え、
前記変位センサは、前記磁歪線の軸線方向にスタートパルスを流すことにより、前記マグネットの近接する磁歪線の部位で弾性波を発生させ、磁歪線の特定部位に設けた受信器までの弾性波の伝播時間を計測することにより、前記マグネットの機械的変位を検出するものであり、
前記ロッドの位置を前記第1のマグネットの位置によって検出し、前記ロッドの軸方向負荷を前記第1と第2のマグネットの離間距離によって検出することを特徴とする、流体圧アクチュエータ。 - シリンダと、
前記シリンダの軸心部に固定され、内部に空洞部を有するガイドパイプと、
前記シリンダの内周とガイドパイプの外周との間を摺動する第1ピストンと、
一端が第1ピストンと連結され、他端が前記シリンダの一端部から外部へ突出し、当該端部が閉じられた円筒状のロッドと、
前記ロッドの内周とガイドパイプの外周との間を摺動する第2ピストンと、
前記ロッドの端部と第2ピストンとの間に形成された第1の流体圧室と、
前記ガイドパイプの空洞部に挿入され、前記ガイドパイプの軸線方向に延びる磁歪線を有する磁歪式変位センサと、
前記第1ピストン及び第2ピストンに、前記変位センサの有効検出ストローク範囲内となるようにそれぞれ固定された第1と第2のマグネットと、
前記第2ピストンとガイドパイプとの間に配置され、前記第2ピストンを前記ロッドの突出方向に付勢し、変位に応じたばね力を発生するスプリングと、を備え、
前記変位センサは、前記磁歪線の軸線方向にスタートパルスを流すことにより、前記マグネットの近接する磁歪線の部位で弾性波を発生させ、磁歪線の特定部位に設けた受信器までの弾性波の伝播時間を計測することにより、前記マグネットの機械的変位を検出するものであり、
前記ロッドの位置を前記第1のマグネットの位置によって検出し、前記ロッドの軸方向負荷を前記第2のマグネットの位置によって検出することを特徴とする、流体圧アクチュエータ。 - 前記ロッドの内周とガイドパイプの外周と第1ピストンと第2ピストンとの間に第2の流体圧室が形成され、当該第2の流体圧室はロッドの外周壁に形成された連通孔を介して、前記ロッドの外周と前記シリンダの内周との間に形成された第3の流体圧室へ接続され、当該第3の流体圧室に面する前記第1ピストンの受圧面積と前記第1の流体圧室に面する前記ガイドパイプの外径に基づく円の断面積とを等しくしたことを特徴とする、請求項2に記載の流体圧アクチュエータ。
- 前記ガイドパイプの先端部にストッパ部が設けられ、当該ストッパ部と第2ピストンとの間に、前記第2ピストンに対して前記スプリングと逆方向に付勢する第2のスプリングが設けられていることを特徴とする、請求項2又は3に記載の流体圧アクチュエータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010019937A JP5383535B2 (ja) | 2010-02-01 | 2010-02-01 | 位置と負荷の検出可能な流体圧アクチュエータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010019937A JP5383535B2 (ja) | 2010-02-01 | 2010-02-01 | 位置と負荷の検出可能な流体圧アクチュエータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011158027A JP2011158027A (ja) | 2011-08-18 |
| JP5383535B2 true JP5383535B2 (ja) | 2014-01-08 |
Family
ID=44590152
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010019937A Expired - Fee Related JP5383535B2 (ja) | 2010-02-01 | 2010-02-01 | 位置と負荷の検出可能な流体圧アクチュエータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5383535B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104074832A (zh) * | 2014-06-18 | 2014-10-01 | 哈尔滨工业大学 | 自保护碟簧式锁紧液压缸 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102562706B (zh) * | 2012-02-23 | 2015-02-04 | 无锡亿利大机械有限公司 | 一体化伺服油缸 |
| JP2013220273A (ja) * | 2012-04-18 | 2013-10-28 | Tokyo Institute Of Technology | 外力算出方法 |
| CN104280158B (zh) * | 2014-09-10 | 2016-06-29 | 舟山市质量技术监督检测研究院 | 一种用于拉力试验机的多层力值传感器及其测量方法 |
| CN104236760B (zh) * | 2014-09-10 | 2016-05-04 | 江苏科技大学 | 一种拉力试验机的弹簧力值传感器 |
| CN107044465A (zh) * | 2017-06-19 | 2017-08-15 | 山东达睿智能设备股份有限公司 | 一种便于安装的气缸定位装置 |
| JP6960157B2 (ja) * | 2017-11-30 | 2021-11-05 | 株式会社東和製作所 | 流体シリンダ |
| CN111386438B (zh) * | 2017-11-30 | 2022-04-15 | 日本精机株式会社 | 行程传感器 |
| CN107975514B (zh) * | 2017-12-27 | 2023-10-03 | 江苏徐工工程机械研究院有限公司 | 油缸和破碎机 |
| KR102033687B1 (ko) * | 2018-05-24 | 2019-10-17 | 재단법인대구경북과학기술원 | 레그 프레스 장치 |
| CN109058219A (zh) * | 2018-08-30 | 2018-12-21 | 哈尔滨工业大学 | 一种内置传感器式液压缸装置 |
| KR102112637B1 (ko) * | 2018-09-19 | 2020-05-19 | 김명구 | 선박용 엔진의 스트로크 측정장치 |
| CN114193395B (zh) * | 2021-12-31 | 2024-01-26 | 中国航空制造技术研究院 | 一种具有监测功能的安装工具 |
| CN116654661B (zh) * | 2023-07-28 | 2023-10-27 | 山西科为磁感技术有限公司 | 一种矿用物料输送机用铁磁材料检测系统 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS53117174A (en) * | 1977-03-22 | 1978-10-13 | Sakunao Tanaka | Double cylinder structure and operating device thereof |
| JPS6285819A (ja) * | 1985-10-11 | 1987-04-20 | Sankyo Boeki Kk | 変位検出装置 |
| JPH0678899B2 (ja) * | 1989-01-07 | 1994-10-05 | サンテスト株式会社 | 変位検出装置 |
| JPH0365002U (ja) * | 1989-10-27 | 1991-06-25 | ||
| JPH04191509A (ja) * | 1990-11-26 | 1992-07-09 | Hitachi Constr Mach Co Ltd | シリンダ装置のストローク検出装置 |
| JPH07269503A (ja) * | 1994-03-30 | 1995-10-17 | Nakamura Koki Kk | ピストン型アキュムレータのピストン位置検出装置 |
| JP2000337975A (ja) * | 2000-01-01 | 2000-12-08 | Mitsubishi Materials Corp | スラスト力検出装置、トルク・スラスト力検出装置及び検出方法 |
| JP2001295812A (ja) * | 2000-04-14 | 2001-10-26 | Koganei Corp | シリンダの衝撃吸収装置 |
| JP4733481B2 (ja) * | 2005-09-09 | 2011-07-27 | カヤバ工業株式会社 | シリンダ装置 |
-
2010
- 2010-02-01 JP JP2010019937A patent/JP5383535B2/ja not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104074832A (zh) * | 2014-06-18 | 2014-10-01 | 哈尔滨工业大学 | 自保护碟簧式锁紧液压缸 |
| CN104074832B (zh) * | 2014-06-18 | 2016-03-23 | 哈尔滨工业大学 | 自保护碟簧式锁紧液压缸 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011158027A (ja) | 2011-08-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5383535B2 (ja) | 位置と負荷の検出可能な流体圧アクチュエータ | |
| JP5715161B2 (ja) | 弁装置 | |
| JP6713457B2 (ja) | 磁場生成器及び位置検出アセンブリ | |
| US5514961A (en) | Position detecting device for a linear drive including two magnets having like poles disposed facing each other for concentrating the flux at one point | |
| US8555772B2 (en) | Directional control valve, particularly for controlling an actuating cylinder of a turbo-machine | |
| US7788983B2 (en) | Sensor arrangement | |
| US20130228401A1 (en) | Vibration damper having a sensor device | |
| US8485497B2 (en) | Hydraulic valve device with associated spool displacement transducer | |
| GB2591393A (en) | Flow tube position sensor and monitoring for sub surface safety valves | |
| CN104729446B (zh) | 一种测量密封圈弹性变形极限位移和最大静摩擦力的装置 | |
| WO2012039293A1 (ja) | リニアアクチュエータ | |
| CN115989379A (zh) | 具有位置监测机构和液压控制系统的液压插装阀和方法 | |
| JP5711858B1 (ja) | 衝撃緩衝機能付きシリンダ | |
| CN209370577U (zh) | 具有传感器功能的过程阀 | |
| JP2017009485A (ja) | ストローク検出装置 | |
| JP2019519739A (ja) | 油空圧式ピストン型アキュムレータ | |
| JP2006508365A (ja) | 移動部材用速度センサー | |
| JP2017062146A (ja) | スプール弁位置検出装置 | |
| US20190154164A1 (en) | Piezoelectrically actuated quick-action hydraulic valve | |
| US11313389B2 (en) | Directly-controlled hydraulic directional valve | |
| EP3483456A1 (en) | Device for detecting position of a piston in a fluid pressure cylinder | |
| CN205331581U (zh) | 一种阀芯位移检测传感器 | |
| RU102265U1 (ru) | Измерительный преобразователь ускорений типа "сопло-заслонка" | |
| JP6219595B2 (ja) | 荷重制御装置 | |
| CN219035610U (zh) | 电磁阀 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121115 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130913 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131001 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131001 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5383535 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |