JP5314761B2 - レオメータ制御システム - Google Patents
レオメータ制御システム Download PDFInfo
- Publication number
- JP5314761B2 JP5314761B2 JP2011520603A JP2011520603A JP5314761B2 JP 5314761 B2 JP5314761 B2 JP 5314761B2 JP 2011520603 A JP2011520603 A JP 2011520603A JP 2011520603 A JP2011520603 A JP 2011520603A JP 5314761 B2 JP5314761 B2 JP 5314761B2
- Authority
- JP
- Japan
- Prior art keywords
- rheometer
- sample
- controller
- control
- movable part
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000006870 function Effects 0.000 claims description 21
- 230000003044 adaptive effect Effects 0.000 claims description 6
- 230000000694 effects Effects 0.000 claims description 5
- 238000000034 method Methods 0.000 description 12
- 238000012937 correction Methods 0.000 description 10
- 239000000463 material Substances 0.000 description 7
- 230000008859 change Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 238000013459 approach Methods 0.000 description 5
- 238000012360 testing method Methods 0.000 description 5
- 230000006835 compression Effects 0.000 description 4
- 238000007906 compression Methods 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 3
- 238000000518 rheometry Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 239000006260 foam Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 238000012031 short term test Methods 0.000 description 1
- 239000011343 solid material Substances 0.000 description 1
- 238000009864 tensile test Methods 0.000 description 1
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N11/00—Investigating flow properties of materials, e.g. viscosity, plasticity; Analysing materials by determining flow properties
- G01N11/10—Investigating flow properties of materials, e.g. viscosity, plasticity; Analysing materials by determining flow properties by moving a body within the material
- G01N11/14—Investigating flow properties of materials, e.g. viscosity, plasticity; Analysing materials by determining flow properties by moving a body within the material by using rotary bodies, e.g. vane
- G01N11/142—Sample held between two members substantially perpendicular to axis of rotation, e.g. parallel plate viscometer
Landscapes
- General Health & Medical Sciences (AREA)
- Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Investigating Strength Of Materials By Application Of Mechanical Stress (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
- Preparation Of Compounds By Using Micro-Organisms (AREA)
- Developing Agents For Electrophotography (AREA)
Description
本発明は、参照により本明細書に組み込まれる、2008年8月1日に出願された米国仮特許出願第61/137,670号の利益を主張するものである。
[発明の分野]
本発明は、レオメータ及びレオメータを制御する方法に関する。
[発明の背景]
レオメータは、材料の流動と変形を測定するために用いられる。回転型レオメータは、一般的には、固定されたベースプレートと回転式上方プレートとの間でサンプルを把持する。ベース部と回転式上方プレート部との間にあるギャップを一定に保って測定するタイプもあれば、サンプルに作用する法線力を一定に保って測定するタイプもある。
[発明の概要]
1つの一般的な局面において、本発明は、サンプルの特性を測定するためのレオメータを特徴とし、該レオメータは、サンプルと接触するための接触面を有する可動部と、サンプルと接触するための接触面を有する固定部とを備える。また、レオメータは、可動部と固定部との間において相対的な垂直運動を提供するための垂直アクチュエータと、可動部と固定部との間において相対的な回転運動を提供するための回転アクチュエータとを備える。継続的にサンプリングされる力のコントローラは、垂直アクチュエータに提供された継続的な制御信号の使用を介して可動部及び固定部によってサンプルに及ぼされる力を制御するために機能する。好適な実施例では、コントローラはサンプリングされるデータのデジタルコントローラである。
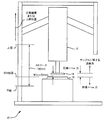
図1を参照すると、本発明によるレオメータは回転アクチュエータを有しており、この回転アクチュエータは、例えば上部プレートのような移動可能な上部に対して動作可能なように接続されている。この上部プレートと下部プレートとは、サンプルを試験するためのギャップによって隔てられている。垂直アクチュエータは、動作可能なように回転アクチュエータに接続され、上部プレートを伴って回転アクチュエータを上昇または下降させることができ、ギャップ、あるいはギャップにあるサンプルに作用する力を制御する。
Claims (9)
- サンプルの特性を測定するためのレオメータであって、
前記サンプルと接触するための接触面を有する可動部と、
前記サンプルと接触するための接触面を有する固定部と、
前記可動部と前記固定部との間において、相対的な垂直運動を提供するための垂直アクチュエータと、
前記可動部と前記固定部との間において、相対的な回転運動を提供するための回転アクチュエータと、
前記垂直アクチュエータに提供された継続的な制御信号の使用を介して前記可動部及び前記固定部によって前記サンプルに及ぼされる力を制御するために機能するコントローラと、
を備え、
前記コントローラは、前記垂直アクチュエータを制御するために、及びコンプライアンス制御ロジックに基き該レオメータにおけるコンプライアンス誤差を補正するために機能する
ことを特徴とする、レオメータ。 - 請求項1に記載のレオメータであって、
前記コントローラは、サンプルに及ぼされる力を検出するための歪みゲージにおけるコンプライアンス誤差を補正するために機能することを特徴とする、レオメータ。 - 請求項1又は2に記載のレオメータであって、
前記コントローラは、前記サンプルの少なくとも1つの特性に生じる変化に対して、適応制御ロジックに基き制御を適応させるために機能する、
ことを特徴とする、レオメータ。 - 請求項3に記載のレオメータであって、
前記コントローラは、前記サンプルの係数に基づいて制御を適応させるために機能することを特徴とする、レオメータ。 - 請求項1から4のいずれか1項に記載のレオメータであって、
前記コントローラは、カスタマイズ可能な位置速度プロファイルを含むプログラマブルアンチワインドアップロジックに基づき、前記可動部と前記固定部との間における最大相対速度を制限するために機能する、
ことを特徴とする、レオメータ。 - 請求項5に記載のレオメータであって、
前記コントローラは、線形プロファイルを生成するために機能することを特徴とする、レオメータ。 - 請求項5または6に記載のレオメータであって、
前記コントローラは、指数関数プロファイルを生成するために機能することを特徴とする、レオメータ。 - 請求項5から7のいずれか1項に記載のレオメータであって、
前記コントローラは、サブプロファイルをより大きなプロファイルへ統合するために機能することを特徴とする、レオメータ。 - 請求項1から8のいずれか1項に記載のレオメータであって、
前記コントローラは、慣性補償ロジックに基き、前記可動部の速度が変動する間の慣性効果に対する力の値を補正するために機能する、
ことを特徴とする、レオメータ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13767008P | 2008-08-01 | 2008-08-01 | |
| US61/137,670 | 2008-08-01 | ||
| PCT/GB2009/050962 WO2010013066A2 (en) | 2008-08-01 | 2009-07-31 | Rheometer control system |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011530063A JP2011530063A (ja) | 2011-12-15 |
| JP2011530063A5 JP2011530063A5 (ja) | 2012-09-13 |
| JP5314761B2 true JP5314761B2 (ja) | 2013-10-16 |
Family
ID=41217617
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011520603A Active JP5314761B2 (ja) | 2008-08-01 | 2009-07-31 | レオメータ制御システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9958368B2 (ja) |
| EP (1) | EP2307873B1 (ja) |
| JP (1) | JP5314761B2 (ja) |
| CN (1) | CN102112861B (ja) |
| WO (1) | WO2010013066A2 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AT508237B1 (de) | 2009-04-28 | 2011-05-15 | Anton Paar Gmbh | Verfahren und vorrichtung zur bestimmung der rheologischen eigenschaften von mediumsproben |
| AT515219B1 (de) * | 2014-02-20 | 2015-07-15 | Anton Paar Gmbh | Verfahren zur Ermittlung für Messdaten von Proben und Rheometer |
| EP3123146B1 (en) | 2014-03-26 | 2021-05-05 | Danmarks Tekniske Universitet (DTU) | Scanning rheometer |
| CN103926171B (zh) * | 2014-04-08 | 2016-01-20 | 清华大学 | 高速流变仪 |
| KR101719412B1 (ko) | 2015-04-30 | 2017-03-23 | 서울대학교산학협력단 | 레오미터용 정밀 토션블럭 |
| AT517730A1 (de) * | 2015-09-15 | 2017-04-15 | Anton Paar Gmbh | Verfahren und Rheometer zur Untersuchung von Pulverproben |
| CN105928833B (zh) * | 2016-06-29 | 2019-05-10 | 中国石油大学(华东) | 一种同轴圆筒流变仪流变测试数据的修正方法 |
| CN107144675B (zh) * | 2017-04-06 | 2019-11-08 | 杭州娃哈哈科技有限公司 | 一种饮料网络结构检测系统、装置及其方法 |
| CN110361299B (zh) * | 2018-06-28 | 2022-04-22 | 廊坊立邦涂料有限公司 | 一种平整/装饰表面的半固体材料的流变性能测试方法 |
| CN110361301B (zh) * | 2018-06-28 | 2022-04-22 | 廊坊立邦涂料有限公司 | 一种平整/装饰表面的半固体材料的流变性能测试方法 |
| CN110361300B (zh) * | 2018-06-28 | 2022-06-10 | 廊坊立邦涂料有限公司 | 一种平整/装饰表面的半固体材料的流变性能测试方法 |
| CN108956379A (zh) * | 2018-08-01 | 2018-12-07 | 上海砼瑞仪器设备有限公司 | 一种流变仪和摩擦计两用的测试装置 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4501155A (en) * | 1983-06-29 | 1985-02-26 | Rheometrics, Inc. | Compensated rheometer |
| CN1036678C (zh) * | 1992-05-14 | 1997-12-10 | 华中理工大学 | 微机化在线粘度测量装置 |
| JPH0674886A (ja) * | 1992-08-28 | 1994-03-18 | Iwamoto Seisakusho:Kk | 粘弾性測定装置 |
| US5321974A (en) * | 1993-06-04 | 1994-06-21 | Radian Corporation | Method and device for determining rheological properties |
| US5610325A (en) * | 1995-06-05 | 1997-03-11 | Viscoustech, Inc. | Torsional rheometer for granular materials slurries and gas-solid mixtures and related methods |
| JPH08338802A (ja) * | 1995-06-13 | 1996-12-24 | Rion Co Ltd | 回転粘度計 |
| GB9606337D0 (en) | 1996-03-26 | 1996-05-29 | Freeman Reginald E | Rheometer |
| AT404192B (de) * | 1996-05-02 | 1998-09-25 | Anton Paar Gmbh | Rotationsviskosimeter |
| CN2286877Y (zh) * | 1996-10-25 | 1998-07-29 | 北京弘华机电新技术公司 | 粘度计 |
| JPH10309684A (ja) * | 1997-05-07 | 1998-11-24 | Yaskawa Electric Corp | マニピュレータのコンプライアンス制御方式 |
| AT409304B (de) * | 1999-09-24 | 2002-07-25 | Anton Paar Gmbh | Rotationsrheometer |
| GB0031022D0 (en) * | 2000-12-19 | 2001-01-31 | Bohlin Instr Ltd | A closed loop rheometer |
| GB0128486D0 (en) * | 2001-11-28 | 2002-01-23 | Stable Micro Systems Ltd | Rheometer |
| DE10209350B4 (de) * | 2002-03-02 | 2013-02-21 | Thermo Electron (Karlsruhe) Gmbh | Rheometer |
| US20040123650A1 (en) | 2002-09-17 | 2004-07-01 | Symyx Technologies, Inc. | High throughput rheological testing of materials |
| FR2902879B1 (fr) * | 2006-06-22 | 2008-10-10 | Michelin Soc Tech | Rheometre orthogonal |
| JP4956098B2 (ja) * | 2006-08-31 | 2012-06-20 | 株式会社東芝 | 潤滑剤及び粘稠性物質の劣化診断装置及びその劣化診断方法 |
-
2009
- 2009-07-31 US US13/057,155 patent/US9958368B2/en active Active
- 2009-07-31 WO PCT/GB2009/050962 patent/WO2010013066A2/en active Application Filing
- 2009-07-31 EP EP09785434.3A patent/EP2307873B1/en active Active
- 2009-07-31 JP JP2011520603A patent/JP5314761B2/ja active Active
- 2009-07-31 CN CN2009801300015A patent/CN102112861B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN102112861A (zh) | 2011-06-29 |
| EP2307873B1 (en) | 2018-03-21 |
| WO2010013066A2 (en) | 2010-02-04 |
| WO2010013066A3 (en) | 2010-09-10 |
| CN102112861B (zh) | 2013-09-25 |
| US20120240665A1 (en) | 2012-09-27 |
| US9958368B2 (en) | 2018-05-01 |
| JP2011530063A (ja) | 2011-12-15 |
| EP2307873A2 (en) | 2011-04-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5314761B2 (ja) | レオメータ制御システム | |
| JP5180212B2 (ja) | 材料試験装置の調節方法 | |
| RU2011117603A (ru) | Система и способ позиционирования | |
| CN110504880B (zh) | 一种磁通切换永磁直线电机干扰观测前馈补偿控制方法 | |
| JP5574228B2 (ja) | 波動歯車減速機の温度変化に伴う摩擦特性変動を考慮したアクチュエータの適応型摩擦補償法 | |
| WO2020070795A1 (ja) | ガバナシステムの特性制御装置、及びエレベータ装置 | |
| CN111037562A (zh) | 机器人的控制方法、装置及机器人 | |
| US20020033044A1 (en) | Impression forming mechanism and hardness testing apparatus | |
| WO2007125781A1 (ja) | 制振装置 | |
| US11536741B2 (en) | Method for determining the tension of a drive belt | |
| US20030174432A1 (en) | Method and apparatus for head positioning control in a disk drive | |
| US6714879B2 (en) | Closed loop rheometer | |
| JP4015615B2 (ja) | 減衰の少ない電気機械チェーンの角速度制御方法および装置 | |
| US11592375B2 (en) | Collision mitigation apparatus material testing systems having collision mitigation apparatus | |
| JP5683825B2 (ja) | 動的粘弾性測定装置および動的粘弾性測定方法 | |
| CN114114914B (zh) | 应用于模型参考适应控制系统中的被控对象的性能监测方法 | |
| JP2001091433A (ja) | 硬さ試験機 | |
| JP4056384B2 (ja) | アクティブダンパー制御装置、制振装置及びアクティブダンパー制御方法 | |
| US20230146614A1 (en) | Material testing machine | |
| CN220670708U (zh) | 一种负载听音测试仪 | |
| CN118074592B (zh) | 一种转速控制方法、装置、电子设备及存储介质 | |
| JP3352235B2 (ja) | スライダ駆動制御方法及びその装置 | |
| CN113196033A (zh) | 外环扭矩控制 | |
| JPH0720024A (ja) | 材料試験機 | |
| JPH1116308A (ja) | 磁気ディスク装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120724 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120724 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130530 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130611 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130705 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5314761 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |