JP5295352B2 - システムに関する動作予測を特定するための方法 - Google Patents
システムに関する動作予測を特定するための方法 Download PDFInfo
- Publication number
- JP5295352B2 JP5295352B2 JP2011502289A JP2011502289A JP5295352B2 JP 5295352 B2 JP5295352 B2 JP 5295352B2 JP 2011502289 A JP2011502289 A JP 2011502289A JP 2011502289 A JP2011502289 A JP 2011502289A JP 5295352 B2 JP5295352 B2 JP 5295352B2
- Authority
- JP
- Japan
- Prior art keywords
- prediction
- damage
- linear regression
- measured
- predictions
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 27
- 238000005259 measurement Methods 0.000 claims description 40
- 238000012417 linear regression Methods 0.000 claims description 36
- 238000012545 processing Methods 0.000 claims description 10
- 230000007613 environmental effect Effects 0.000 claims description 9
- 230000003044 adaptive effect Effects 0.000 claims description 2
- 238000005219 brazing Methods 0.000 claims 1
- 238000004364 calculation method Methods 0.000 description 21
- 238000004422 calculation algorithm Methods 0.000 description 19
- 230000015654 memory Effects 0.000 description 18
- 238000003745 diagnosis Methods 0.000 description 14
- 238000012544 monitoring process Methods 0.000 description 14
- 206010011906 Death Diseases 0.000 description 11
- 238000012360 testing method Methods 0.000 description 7
- 239000000872 buffer Substances 0.000 description 6
- 230000036541 health Effects 0.000 description 5
- 230000006870 function Effects 0.000 description 4
- 238000012423 maintenance Methods 0.000 description 4
- 230000003449 preventive effect Effects 0.000 description 4
- 238000009825 accumulation Methods 0.000 description 3
- 230000015556 catabolic process Effects 0.000 description 3
- 238000006731 degradation reaction Methods 0.000 description 3
- 238000011156 evaluation Methods 0.000 description 3
- 230000002349 favourable effect Effects 0.000 description 3
- 230000006872 improvement Effects 0.000 description 3
- 239000011159 matrix material Substances 0.000 description 3
- 238000004088 simulation Methods 0.000 description 3
- 230000001186 cumulative effect Effects 0.000 description 2
- 238000007689 inspection Methods 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 238000012806 monitoring device Methods 0.000 description 2
- 238000005192 partition Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000003860 storage Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000009529 body temperature measurement Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000000354 decomposition reaction Methods 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 238000013213 extrapolation Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 238000011065 in-situ storage Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B23/00—Testing or monitoring of control systems or parts thereof
- G05B23/02—Electric testing or monitoring
- G05B23/0205—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults
- G05B23/0259—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults characterized by the response to fault detection
- G05B23/0283—Predictive maintenance, e.g. involving the monitoring of a system and, based on the monitoring results, taking decisions on the maintenance schedule of the monitored system; Estimating remaining useful life [RUL]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
- G06Q10/063—Operations research, analysis or management
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
- G06Q10/063—Operations research, analysis or management
- G06Q10/0639—Performance analysis of employees; Performance analysis of enterprise or organisation operations
- G06Q10/06393—Score-carding, benchmarking or key performance indicator [KPI] analysis
Landscapes
- Business, Economics & Management (AREA)
- Human Resources & Organizations (AREA)
- Engineering & Computer Science (AREA)
- Entrepreneurship & Innovation (AREA)
- Economics (AREA)
- Strategic Management (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Educational Administration (AREA)
- Development Economics (AREA)
- Operations Research (AREA)
- Quality & Reliability (AREA)
- Tourism & Hospitality (AREA)
- Game Theory and Decision Science (AREA)
- General Business, Economics & Management (AREA)
- Marketing (AREA)
- Theoretical Computer Science (AREA)
- Automation & Control Theory (AREA)
- Testing Of Devices, Machine Parts, Or Other Structures Thereof (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
- Testing Or Calibration Of Command Recording Devices (AREA)
Description
−システムを取り巻く環境の環境値の測定が行われ
−システムによって消費寿命を特定するためにこれらの測定値が中央処理装置で処理され、
−この消費寿命はこの環境におけるシステムの履歴に由来しており、かつ
−正常動作の寿命予測が推測される方法において、
−この予測が、当該環境におけるシステムのヒストリから特定されるダメージの区分的線形回帰によって推測されることを特徴とする方法である。
3 システム
4 環境
5 マイクロプロセッサ
6 プログラムメモリ
7 データメモリ
8 キーボード/スクリーン
9 センサ
10 インターフェース
11、12、16、17 領域
13 インターフェース
14 外部バス
18〜27 半サイクル
28、29 極値
30 記憶領域
31、32 線形回帰の直線
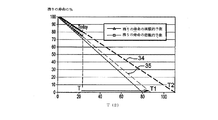
33 直線
34 楽観的曲線
35 悲観的曲線
36、37 曲線
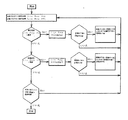
38 初期化
39 計算
40、41 線形回帰
42、43 テストステップ
44 テスト
45〜48 領域
Claims (8)
- −システムに関する動作予測を特定するための方法であり、
−前記システムを取り巻く環境の環境値の測定が行われ、
−前記システムのダメージを特定するためにこれらの測定値が中央処理装置で処理され、
−このダメージが前記環境における前記システムのヒストリに由来しており、かつ
正常動作の寿命予測が推測される方法において、
−前記予測が、前記環境における前記システムのヒストリから特定されるダメージの区分的線形回帰を使用して推測されることを特徴とする方法。 - −現時点でのダメージの進み具合の傾向が測定され、現時点で、故障するまでの動作の寿命予測が修正されて推測されることを特徴とする請求項1に記載の方法。
- 前記傾向が適合可能な数値的回帰を使用して測定されることを特徴とする請求項2に記載の方法。
- 前記線形回帰が全ての測定地点に適用されることを特徴とする請求項3に記載の方法。
- −新しい傾向が、最大200地点まで並行して計算されることを特徴とする請求項4に記載の方法。
- −第1の傾向が計算され、
−次いで第2の傾向が最大200地点までずれて計算され、前記第1の傾向を示す直線と前記第2の傾向を示す直線との組み合わせることによって前記第1の傾向が修正されることを特徴とする請求項3から5のいずれか1項に記載の方法。 - −楽観的予測と悲観的予測の2つの予測が測定され、実際の予測がこれら2つの予測の間にあることを特徴とする請求項1から6のいずれか1項に記載の方法。
- −特に監視されるシステムの電子カード上のろう付け接合部の温度が測定されることを特徴とする請求項1から3のいずれか1項に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0852171A FR2929728B1 (fr) | 2008-04-02 | 2008-04-02 | Procede de determination du pronostic de fonctionnement d'un systeme. |
| FR0852171 | 2008-04-02 | ||
| PCT/EP2009/002378 WO2009121583A1 (fr) | 2008-04-02 | 2009-04-01 | Procede de determination du pronostic de fonctionnement d'un systeme |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011520170A JP2011520170A (ja) | 2011-07-14 |
| JP2011520170A5 JP2011520170A5 (ja) | 2012-12-27 |
| JP5295352B2 true JP5295352B2 (ja) | 2013-09-18 |
Family
ID=39768819
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011502289A Expired - Fee Related JP5295352B2 (ja) | 2008-04-02 | 2009-04-01 | システムに関する動作予測を特定するための方法 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US20110046996A1 (ja) |
| EP (1) | EP2266005B1 (ja) |
| JP (1) | JP5295352B2 (ja) |
| CN (1) | CN101999101B (ja) |
| BR (1) | BRPI0911371A2 (ja) |
| CA (1) | CA2719130C (ja) |
| FR (1) | FR2929728B1 (ja) |
| WO (1) | WO2009121583A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010047305A1 (de) * | 2010-10-01 | 2012-04-05 | Ika-Werke Gmbh & Co. Kg | Misch-, Rühr- oder Dispergierverfahren und Vorrichtung hierfür |
| US8909453B2 (en) | 2012-01-12 | 2014-12-09 | Bell-Helicopter Textron Inc. | System and method of measuring and monitoring torque in a rotorcraft drive system |
| WO2015023201A2 (en) * | 2013-06-19 | 2015-02-19 | Continuware Corporation | Method and system for determining hardware life expectancy and failure prevention |
| US10496787B2 (en) | 2013-07-02 | 2019-12-03 | Bell Helicopter Textron Inc. | System and method of rotorcraft usage monitoring |
| US20160306555A1 (en) * | 2013-12-20 | 2016-10-20 | Sinchan Banerjee | Storage capacity regression |
| CN105469980A (zh) * | 2014-09-26 | 2016-04-06 | 西门子公司 | 电容器模块、电路布置及运行方法 |
| US9568912B2 (en) * | 2015-06-15 | 2017-02-14 | Honeywell International Inc. | Aircraft prognostic systems and methods for determining adaptive time between overhaul for line replaceable units |
| CN108268076B (zh) * | 2018-01-23 | 2020-12-22 | 江苏省兴安科技发展有限公司 | 一种基于大数据的机房运行安全评估系统 |
| JP7430024B2 (ja) * | 2020-07-16 | 2024-02-09 | ベンテック ライフ システムズ, インコーポレイテッド | ガスを濃縮するためのシステムおよび方法 |
| EP4181993A1 (en) | 2020-07-16 | 2023-05-24 | Invacare Corporation | System and method for concentrating gas |
| US11952142B2 (en) * | 2021-05-10 | 2024-04-09 | Honeywell International Inc. | Methods and systems for depicting avionics data anomalies |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4866714A (en) * | 1987-10-15 | 1989-09-12 | Westinghouse Electric Corp. | Personal computer-based dynamic burn-in system |
| JP2738732B2 (ja) * | 1988-09-16 | 1998-04-08 | 株式会社日立製作所 | 劣化度予測装置および方法 |
| JP3201809B2 (ja) * | 1992-01-30 | 2001-08-27 | 三菱電機株式会社 | パルスレーザ装置 |
| JPH0714948A (ja) * | 1993-06-15 | 1995-01-17 | Hitachi Ltd | パワー半導体モジュール |
| DE19708617C2 (de) * | 1997-03-03 | 1999-02-04 | Siemens Ag | Chipkartenmodul und Verfahren zu seiner Herstellung sowie diesen umfassende Chipkarte |
| US6977517B2 (en) * | 2002-05-20 | 2005-12-20 | Finisar Corporation | Laser production and product qualification via accelerated life testing based on statistical modeling |
| JP2004045343A (ja) * | 2002-07-15 | 2004-02-12 | Toshiba Corp | はんだ接合部の寿命診断方法及び装置 |
| FR2844902B1 (fr) | 2002-09-19 | 2013-09-13 | Eads Ccr Groupement D Interet Economique | Dispositif et procede d'enregistrement de donnees environnementales |
| DE10328721A1 (de) * | 2003-06-25 | 2005-01-13 | Robert Bosch Gmbh | Verfahren zur Vorhersage einer Restlebensdauer eines elektrischen Energiespeichers |
| JP4244194B2 (ja) * | 2004-02-17 | 2009-03-25 | 日本電信電話株式会社 | ニッケル水素蓄電池の寿命予測法 |
| JP4115405B2 (ja) * | 2004-02-27 | 2008-07-09 | 三菱重工業株式会社 | 水中構造物の劣化速度予測方法及び劣化診断システム |
| JP4185906B2 (ja) * | 2004-12-01 | 2008-11-26 | キヤノン株式会社 | 画像耐ガス性試験方法 |
| US20060271255A1 (en) | 2004-12-30 | 2006-11-30 | Teradyne, Inc. | System and method for vehicle diagnostics and prognostics |
| FR2896875B1 (fr) | 2006-01-30 | 2008-04-25 | Eads Europ Aeronautic Defence | Dispositif et procede de surveillance d'une grandeur environnementale en temps reel |
| US7514941B2 (en) * | 2006-03-15 | 2009-04-07 | Raytheon Company | Method and apparatus for predicting the reliability of electronic systems |
| JP5233198B2 (ja) * | 2007-08-06 | 2013-07-10 | 富士電機株式会社 | 半導体装置 |
| US8494810B2 (en) * | 2009-06-05 | 2013-07-23 | Jentek Sensors, Inc. | Component adaptive life management |
-
2008
- 2008-04-02 FR FR0852171A patent/FR2929728B1/fr not_active Expired - Fee Related
-
2009
- 2009-04-01 JP JP2011502289A patent/JP5295352B2/ja not_active Expired - Fee Related
- 2009-04-01 EP EP09728167.9A patent/EP2266005B1/fr active Active
- 2009-04-01 BR BRPI0911371A patent/BRPI0911371A2/pt not_active Application Discontinuation
- 2009-04-01 US US12/935,665 patent/US20110046996A1/en not_active Abandoned
- 2009-04-01 WO PCT/EP2009/002378 patent/WO2009121583A1/fr active Application Filing
- 2009-04-01 CN CN200980113066.9A patent/CN101999101B/zh not_active Expired - Fee Related
- 2009-04-01 CA CA2719130A patent/CA2719130C/fr not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| FR2929728B1 (fr) | 2011-01-14 |
| EP2266005B1 (fr) | 2019-06-05 |
| CA2719130C (fr) | 2015-10-06 |
| CN101999101B (zh) | 2015-10-14 |
| BRPI0911371A2 (pt) | 2015-12-29 |
| CA2719130A1 (fr) | 2009-10-08 |
| JP2011520170A (ja) | 2011-07-14 |
| EP2266005A1 (fr) | 2010-12-29 |
| WO2009121583A1 (fr) | 2009-10-08 |
| FR2929728A1 (fr) | 2009-10-09 |
| CN101999101A (zh) | 2011-03-30 |
| US20110046996A1 (en) | 2011-02-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5295352B2 (ja) | システムに関する動作予測を特定するための方法 | |
| JP2011520170A5 (ja) | ||
| Wang et al. | On the application of a model of condition-based maintenance | |
| CN105987822B (zh) | 用于预测装备故障的方法和系统 | |
| Nguyen et al. | Multi-level predictive maintenance for multi-component systems | |
| Lin et al. | Non-periodic preventive maintenance with reliability thresholds for complex repairable systems | |
| US20160261481A1 (en) | Data collection system, data collection method, server, and gateway | |
| CN106919141B (zh) | 预防维护管理系统、单元控制装置、预防维护管理方法 | |
| JP4612699B2 (ja) | 監視診断装置及び遠隔監視診断システム | |
| CA3031151C (en) | A method for operating a condition monitoring system of a vibrating machine and a condition monitoring system | |
| US9476803B2 (en) | Method and an apparatus for predicting the condition of a machine or a component of the machine | |
| JP4943653B2 (ja) | 多事象同時発生時の競合する原因事象の確率及び/又はシステムアベイラビリティを決定するプロセス | |
| RU2757436C2 (ru) | Устройство и способ контроля указаний на неисправность от транспортного средства, компьютерочитаемый носитель | |
| US8671315B2 (en) | Prognostic analysis system and methods of operation | |
| JP6427357B2 (ja) | 診断支援システム及び診断支援方法 | |
| JP6777142B2 (ja) | システム分析装置、システム分析方法、及び、プログラム | |
| KR102176102B1 (ko) | 리스크 평가 장치, 리스크 평가 방법 및 리스크 평가 프로그램 | |
| WO2014022204A2 (en) | Estimating remaining useful life from prognostic features discovered using genetic programming | |
| KR102411262B1 (ko) | 리스크 평가 장치, 리스크 평가 방법 및 리스크 평가 프로그램 | |
| KR101278428B1 (ko) | 예지 보전 기반의 실시간 협업 기업 자산 관리 시스템 및 방법 | |
| JP6489235B2 (ja) | システム分析方法、システム分析装置、および、プログラム | |
| JPWO2018073960A1 (ja) | 表示方法、表示装置、および、プログラム | |
| Nystad et al. | Lifetime models for remaining useful life estimation with randomly distributed failure thresholds | |
| KR20180040452A (ko) | 설비 노화 지수를 이용한 이상 감지 방법 및 장치 | |
| JP2015179443A (ja) | 診断モデル生成装置、診断用モデル生成方法、及び異常診断装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120515 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120809 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120816 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120914 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120924 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20121004 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20121012 |
|
| A524 | Written submission of copy of amendment under section 19 (pct) |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20121112 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130517 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130611 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5295352 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |