JP5284475B2 - 前白色化を伴うlmsアルゴリズムによって適応させられる適応フィルタの更新済みフィルタ係数を決定する方法 - Google Patents
前白色化を伴うlmsアルゴリズムによって適応させられる適応フィルタの更新済みフィルタ係数を決定する方法 Download PDFInfo
- Publication number
- JP5284475B2 JP5284475B2 JP2011525117A JP2011525117A JP5284475B2 JP 5284475 B2 JP5284475 B2 JP 5284475B2 JP 2011525117 A JP2011525117 A JP 2011525117A JP 2011525117 A JP2011525117 A JP 2011525117A JP 5284475 B2 JP5284475 B2 JP 5284475B2
- Authority
- JP
- Japan
- Prior art keywords
- filter
- whitening
- determining
- adaptive
- coefficients
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000002087 whitening effect Effects 0.000 title claims abstract description 168
- 230000003044 adaptive effect Effects 0.000 title claims abstract description 122
- 238000000034 method Methods 0.000 title claims abstract description 94
- 238000010606 normalization Methods 0.000 claims abstract description 48
- 230000009467 reduction Effects 0.000 claims description 12
- 238000001914 filtration Methods 0.000 claims description 8
- 238000005070 sampling Methods 0.000 claims description 6
- 238000011144 upstream manufacturing Methods 0.000 claims description 6
- 238000004458 analytical method Methods 0.000 description 21
- 230000004044 response Effects 0.000 description 20
- 238000004364 calculation method Methods 0.000 description 18
- 238000012545 processing Methods 0.000 description 13
- 230000008859 change Effects 0.000 description 11
- 238000005259 measurement Methods 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 238000006243 chemical reaction Methods 0.000 description 5
- 230000007423 decrease Effects 0.000 description 5
- 238000013459 approach Methods 0.000 description 3
- 239000011159 matrix material Substances 0.000 description 3
- 230000005236 sound signal Effects 0.000 description 3
- 238000000354 decomposition reaction Methods 0.000 description 2
- 238000001228 spectrum Methods 0.000 description 2
- 238000009825 accumulation Methods 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 238000013178 mathematical model Methods 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 238000007493 shaping process Methods 0.000 description 1
- 230000003595 spectral effect Effects 0.000 description 1
- 238000013179 statistical model Methods 0.000 description 1
- 230000009885 systemic effect Effects 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images


Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H21/00—Adaptive networks
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H21/00—Adaptive networks
- H03H21/0012—Digital adaptive filters
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10L—SPEECH ANALYSIS TECHNIQUES OR SPEECH SYNTHESIS; SPEECH RECOGNITION; SPEECH OR VOICE PROCESSING TECHNIQUES; SPEECH OR AUDIO CODING OR DECODING
- G10L19/00—Speech or audio signals analysis-synthesis techniques for redundancy reduction, e.g. in vocoders; Coding or decoding of speech or audio signals, using source filter models or psychoacoustic analysis
- G10L19/012—Comfort noise or silence coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B3/00—Line transmission systems
- H04B3/02—Details
- H04B3/20—Reducing echo effects or singing; Opening or closing transmitting path; Conditioning for transmission in one direction or the other
- H04B3/23—Reducing echo effects or singing; Opening or closing transmitting path; Conditioning for transmission in one direction or the other using a replica of transmitted signal in the time domain, e.g. echo cancellers
- H04B3/235—Reducing echo effects or singing; Opening or closing transmitting path; Conditioning for transmission in one direction or the other using a replica of transmitted signal in the time domain, e.g. echo cancellers combined with adaptive equaliser
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Evolutionary Computation (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Filters That Use Time-Delay Elements (AREA)
Description
この出願は、全体が参照によりここに組み込まれる、2008年8月25日に出願された米国特許仮出願第61/091,527号の優先権を主張する。
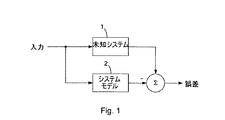
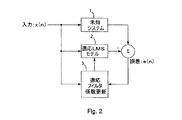
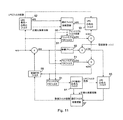
図2は適応LMSフィルタシステムモデルを示す。図1および図2の、同じ参照符号により示されている図形要素は基本的に同じである。図2において、未知システム1と、未知システム1をモデル化する適応フィルタ2とは、入力信号x(n)によって刺激される。実際の出力とモデル化された出力との間の誤差e(n)を判定するために、フィルタ2の出力信号は未知システム1の出力信号から差し引かれる。適応フィルタ2のための更新済みフィルタ係数は、以下でより詳しく論じられるように誤差信号e(n)、入力信号x(n)および前のフィルタ係数に応じて更新ステージ3により生成される。
1. LMSアルゴリズムと同様に、第1の欠点は、入力信号が白色雑音でなければNLMSアルゴリズムが未知システムの最適近似に収束することが保証されないことである。この欠点は、未知システムへの入力信号が完全には制御されない応用例におけるNLMSアルゴリズムの有用性を低下させる。
2. 第2の欠点は、正規化を加えることによって、著しい計算の複雑さが該アルゴリズムに加わることである。フィルタ長さN(すなわち、N個のフィルタ係数を有する)の適応フィルタを考慮するとき、正規化項を決定するために、現在の入力サンプルのパワーと前のN−1個の入力サンプルのパワーとの和が計算されなければならず、次にその和が反転させられなければならない。このような正規化換算係数の強行的計算は、サンプル当たりにN個の積和(multiply−accumulate(MAC))演算(MAC演算は2つの数の積を計算し、その積をアキュムレータに加えるa+b・c→a)と、1つの反転演算(除算)とを必要とするであろう:
EM=(1−kM 2)・EM−1 (方程式16)
EMをエネルギー推定値として使用するとき、正規価値または正規化換算回数は1/EMに好ましく対応する。
1. 適応長さNのFIRフィルタ(すなわち適応フィルタ22あるいはLPC白色化フィルタにおける線形予測子)のフィルタ出力の計算にはサンプル当たりにN個のMACが必要である。
2. 長さNのLMSフィルタ係数更新を行うにはN個のMACが必要である。
3. LPC解析ウィンドウの長さ(すなわち、線形予測子のフィルタ係数を計算するために使用されるウィンドウの長さ)は、LMSフィルタ次数Nに等しくなるように選択される。
4. 長さNの解析ウィンドウでの長さMのLPCフィルタについてのLPC解析はN・(M+1)のMACを必要とする。
5. LPC解析更新期間(更新レートの逆数)は、LMSフィルタの長さの1/2に等しくなるように選択される。
6. 1つの割算は24個のMACを必要とする。
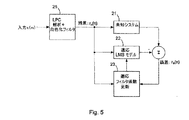
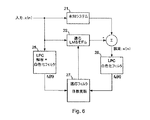
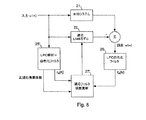
7. 図6および8に示されているように2つのLPC白色化フィルタが使用される。
X1=A+B+C+D+E1+F1+G (方程式19)
X2=A+B+C+D+E2+F2+G (方程式20)
である。
S=100・(1−(X2/X1)) (方程式21)
Claims (32)
- LMSアルゴリズムにより適応させる適応フィルタの少なくとも1つの更新済みフィルタ係数を決定する方法であって、
フィルタリング済み信号を出力する第1白色化フィルタのフィルタ係数を決定するステップと、
前記第1白色化フィルタの前記フィルタ係数を決定する過程で得られた1つ以上の計算された値に基づいて正規化値を決定するステップであって、前記正規化値は前記フィルタリング済み信号のエネルギーと関連することを特徴とする、前記正規化値を決定するステップと、
前記フィルタリング済み信号および前記正規化値に依存して前記適応フィルタの少なくとも1つの更新済みフィルタ係数を決定するために、前記正規化値を更新ステージに伝達するステップと、
を具備することを特徴とする方法。 - 請求項1に記載の方法において、前記第1白色化フィルタは、前記フィルタリング済み信号として残差信号を出力するLPC白色化フィルタであることを特徴とする方法。
- 請求項1又は請求項2に記載の方法において、前記正規化値を決定する前記ステップは、
前記第1白色化フィルタの前記フィルタ係数を決定する過程で得られた前記1つ以上の計算された値に基づいて前記フィルタリング済み信号のエネルギー推定値を決定するステップ
を含むことを特徴とする方法。 - 請求項3に記載の方法において、前記正規化値を決定する前記ステップは、
前記エネルギー推定値を反転させるステップ
をさらに含むことを特徴とする方法。 - 請求項3又は請求項4に記載の方法において、
少なくとも1つのフィルタ係数は次のLMSフィルタ係数更新方程式、
- 請求項3乃至請求項5のいずれか1項に記載の方法において、前記第1白色化フィルタは前記フィルタリング済み信号として残差信号を出力するLPC白色化フィルタであり、前記LPC白色化フィルタの前記フィルタ係数は自己相関方程式を解くためのダービンのアルゴリズムと組み合わされた自己相関方法に本質的に対応する方法に基づいて決定されることを特徴とする方法。
- 請求項6に記載の方法において、前記エネルギー推定値はダービンのアルゴリズムの反復数jの二乗予測誤差Ejに対応することを特徴とする方法。
- 請求項6又は請求項7に記載の方法において、前記エネルギー推定値はダービンのアルゴリズムの最後の反復の二乗予測誤差EMに対応することを特徴とする方法。
- 請求項8に記載の方法において、前記二乗予測誤差EMは、ダービンのアルゴリズムの終わりから2番目の反復の二乗予測誤差EM−1に基づいて決定されることを特徴とする方法。
- 請求項9に記載の方法において、前記エネルギー推定値は2つの積和演算により決定されることを特徴とする方法。
- 請求項1乃至請求項10のいずれか1項に記載の方法において、前記第1白色化フィルタの前記フィルタ係数は適応的に更新されることを特徴とする方法。
- 請求項11に記載の方法において、前記第1白色化フィルタの前記フィルタ係数が更新されるごとに更新済み正規化値が決定されることを特徴とする方法。
- 請求項12に記載の方法において、前記第1白色化フィルタの前記フィルタ係数および前記正規化値は、前記適応フィルタおよび前記第1白色化フィルタの上流側での入力信号のサンプリングレートより低い更新レートで更新されることを特徴とする方法。
- 請求項13に記載の方法において、前記入力信号の統計的特性は前記正規化値の更新期間中本質的に不変であることを特徴とする方法。
- 請求項1乃至請求項12のいずれか1項に記載の方法において、正規化値を決定するステップおよび第1白色化フィルタの前記フィルタ係数を決定するステップは1回実行され、その後は前記正規化値および前記第1白色化フィルタの前記フィルタ係数は固定されたままであることを特徴とする方法。
- 請求項1乃至請求項15のいずれか1項に記載の方法において、前記適応フィルタは前記フィルタリング済み信号を受け取ることを特徴とする方法。
- 請求項1乃至請求項10のいずれか1項に記載の方法において、
前記適応フィルタは前記第1白色化フィルタの上流側から信号を受け取り、
前記適応フィルタの前記少なくとも1つの更新済みフィルタ係数は、前記第1白色化フィルタと同じフィルタ係数を有する第2白色化フィルタによりフィルタリングされた誤差信号にさらに依存して決定される
ことを特徴とする方法。 - 請求項1乃至請求項17のいずれか1項に記載の方法において、前記適応フィルタの全てのフィルタ係数について更新済みフィルタ係数が決定されることを特徴とする方法。
- 請求項3乃至請求項10のいずれか1項に記載の方法において、前記エネルギー推定値は前記第1白色化フィルタの前記フィルタ係数を決定する間に決定されることを特徴とする方法。
- LMSアルゴリズムにより適応させる適応フィルタの少なくとも1つの更新済みフィルタ係数を決定するための装置であって、
フィルタリング済み信号を出力する第1白色化フィルタのフィルタ係数を決定するとともに、前記第1白色化フィルタの前記フィルタ係数を決定する過程で得られた1つ以上の計算された値に基づいて正規化値を決定するための手段であって、前記正規化値は前記フィルタリング済み信号のエネルギーと関連することを特徴とする、手段と、
前記フィルタリング済み信号および前記正規化値に依存して前記適応フィルタの少なくとも1つの更新済みフィルタ係数を決定するための更新ステージと、
前記正規化値を更新ステージに伝達するステップと、
を具備することを特徴とする装置。 - 請求項20に記載の装置において、フィルタ係数を決定するための前記手段は、前記フィルタリング済み信号として残差信号を出力するLPC白色化フィルタのフィルタ係数を決定するように構成されていることを特徴とする装置。
- 請求項20又は請求項21に記載の装置において、前記正規化値を決定するための手段は、前記第1白色化フィルタの前記フィルタ係数を決定する過程で得られた1つ以上の計算された値に基づいて前記フィルタリング済み信号のエネルギー推定値を決定するように構成されていることを特徴とする装置。
- 請求項22に記載の装置において、フィルタ係数を決定するための前記手段は、前記フィルタリング済み信号として残差信号を出力するLPC白色化フィルタのフィルタ係数を決定するように構成され、前記LPC白色化フィルタの前記フィルタ係数を決定するための手段は、自己相関方程式を解くためのダービンのアルゴリズムと組み合わされた自己相関方法に本質的に対応する方法に基づいて前記フィルタ係数を決定するように構成されていることを特徴とする装置。
- 請求項23に記載の装置において、前記エネルギー推定値は、ダービンのアルゴリズムの最後の反復の前記二乗予測誤差EMに対応することを特徴とする装置。
- 請求項20乃至請求項24のいずれかに記載の装置において、正規化値を決定するための前記手段は、前記第1白色化フィルタの前記フィルタ係数が更新されるごとに更新済み正規化値を決定するように構成されていることを特徴とする装置。
- 請求項25に記載の装置において、前記第1白色化フィルタの前記フィルタ係数と前記正規化値とは、前記適応フィルタおよび前記第1白色化フィルタの上流側の入力信号の前記サンプリングレートより低い更新レートで更新されることを特徴とする装置。
- LMSアルゴリズムにより適応させる適応フィルタと、
フィルタリング済み信号を出力する第1白色化フィルタと、
前記第1白色化フィルタのフィルタ係数を決定する手段であるとともに、前記第1白色化フィルタのフィルタ係数を決定する前記手段により得られた1つ以上の計算された値に基づいて正規化値を決定するための手段であって、前記第1白色化フィルタのフィルタ係数を決定する手段であるとともに、正規化値を決定するための手段は共通ユニットを形成し、前記正規化値は前記フィルタリング済み信号のエネルギーと関連することを特徴とする手段と、
前記フィルタリング済み信号および前記正規化値に依存して前記適応フィルタの少なくとも1つの更新済みフィルタ係数を決定するための更新ステージであって、前記共通ユニットは前記正規化値を更新ステージに伝達することを特徴とする更新ステージと、
を具備するフィルタシステム。 - 請求項27に記載のフィルタシステムにおいて、前記適応フィルタは前記フィルタリング済み信号を受け取ることを特徴とするフィルタシステム。
- 請求項27に記載のフィルタシステムにおいて、前記第1白色化フィルタと本質的に同じフィルタ係数を有する第2白色化フィルタをさらに具備し、前記更新ステージでは前記第2白色化フィルタによりフィルタリングされた誤差信号を受け取ることを特徴とするフィルタシステム。
- 請求項27乃至請求項29のいずれか1項に記載のフィルタシステムにおいて、前記適応フィルタはFIRフィルタであることを特徴とするフィルタシステム。
- ソフトウェアプログラムであって、ソフトウェアが実行されたときに請求項1乃至請求項19のいずれか1項に記載の前記方法を実行するための命令を具備することを特徴とするソフトウェアプログラム。
- LMSアルゴリズムにより適応させられる適応フィルタによって信号をフィルタリングする方法において、前記適応フィルタの少なくとも1つの更新済みフィルタ係数は請求項1乃至請求項19のいずれか1項に記載の方法に従って決定されることを特徴とする方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US9152708P | 2008-08-25 | 2008-08-25 | |
| US61/091,527 | 2008-08-25 | ||
| PCT/US2009/054726 WO2010027722A1 (en) | 2008-08-25 | 2009-08-24 | Method for determining updated filter coefficients of an adaptive filter adapted by an lms algorithm with pre-whitening |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012501152A JP2012501152A (ja) | 2012-01-12 |
| JP5284475B2 true JP5284475B2 (ja) | 2013-09-11 |
Family
ID=41268139
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011525117A Expired - Fee Related JP5284475B2 (ja) | 2008-08-25 | 2009-08-24 | 前白色化を伴うlmsアルゴリズムによって適応させられる適応フィルタの更新済みフィルタ係数を決定する方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8594173B2 (ja) |
| EP (1) | EP2327156B1 (ja) |
| JP (1) | JP5284475B2 (ja) |
| KR (1) | KR101225556B1 (ja) |
| CN (1) | CN102132491B (ja) |
| AT (1) | ATE542294T1 (ja) |
| WO (1) | WO2010027722A1 (ja) |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120140918A1 (en) * | 2010-12-06 | 2012-06-07 | Pagebites, Inc. | System and method for echo reduction in audio and video telecommunications over a network |
| WO2012112357A1 (en) | 2011-02-16 | 2012-08-23 | Dolby Laboratories Licensing Corporation | Methods and systems for generating filter coefficients and configuring filters |
| DE102011006129B4 (de) * | 2011-03-25 | 2013-06-06 | Siemens Medical Instruments Pte. Ltd. | Hörvorrichtung mit Rückkopplungsunterdrückungseinrichtung und Verfahren zum Betreiben der Hörvorrichtung |
| CN102171947B (zh) * | 2011-04-14 | 2013-08-28 | 华为技术有限公司 | 滤波处理方法和装置 |
| WO2012153451A1 (ja) | 2011-05-10 | 2012-11-15 | 三菱電機株式会社 | 適応等化器、音響エコーキャンセラ装置および能動騒音制御装置 |
| EP2897334B1 (en) * | 2012-09-27 | 2017-03-29 | Huawei Technologies Co., Ltd. | Adaptive filtering method and system based on error sub-band |
| WO2014096236A2 (en) * | 2012-12-19 | 2014-06-26 | Dolby International Ab | Signal adaptive fir/iir predictors for minimizing entropy |
| GB201309777D0 (en) | 2013-05-31 | 2013-07-17 | Microsoft Corp | Echo suppression |
| GB201309779D0 (en) | 2013-05-31 | 2013-07-17 | Microsoft Corp | Echo removal |
| GB201309771D0 (en) | 2013-05-31 | 2013-07-17 | Microsoft Corp | Echo removal |
| GB201309773D0 (en) | 2013-05-31 | 2013-07-17 | Microsoft Corp | Echo removal |
| CN104009788A (zh) * | 2014-05-21 | 2014-08-27 | 京信通信系统(中国)有限公司 | 直放站反馈抵消抗自激方法、系统及直放站 |
| KR101982788B1 (ko) * | 2014-10-01 | 2019-05-27 | 엘지전자 주식회사 | 향상된 예측 필터를 이용하여 비디오 신호를 인코딩, 디코딩하는 방법 및 장치 |
| DE102014224911A1 (de) * | 2014-12-04 | 2016-06-09 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Bestimmen statistischer Eigenschaften von Rohmesswerten |
| DE102015204010B4 (de) * | 2015-03-05 | 2016-12-15 | Sivantos Pte. Ltd. | Verfahren zur Unterdrückung eines Störgeräusches in einem akustischen System |
| CN104753849B (zh) * | 2015-04-21 | 2018-01-02 | 东南大学 | Mimo dco‑ofdm通信方法、信号接收装置及系统 |
| CN105654959B (zh) * | 2016-01-22 | 2020-03-06 | 韶关学院 | 一种自适应滤波的系数更新方法及装置 |
| CN108710106B (zh) * | 2018-05-15 | 2021-04-09 | 中国科学院声学研究所 | 一种基于红外定位的有源头枕装置 |
| WO2020241915A1 (ko) * | 2019-05-29 | 2020-12-03 | 이대훈 | 골전도 블루투스 모노 이어셋 |
| TWI699090B (zh) * | 2019-06-21 | 2020-07-11 | 宏碁股份有限公司 | 訊號處理裝置、訊號處理方法及非暫態電腦可讀取記錄媒體 |
| CN111025903B (zh) * | 2019-12-07 | 2021-01-26 | 河南大学 | 一种基于结构自适应滤波的非线性系统辨识方法 |
| CN113507279B (zh) * | 2021-06-11 | 2024-05-03 | 西安空间无线电技术研究所 | 一种高精度星间距离观测数据的降速率滤波方法 |
| CN113676156B (zh) * | 2021-08-09 | 2024-01-26 | 成都玖锦科技有限公司 | 一种基于lms的任意幅频响应fir滤波器设计方法 |
| CN115776288A (zh) * | 2022-11-04 | 2023-03-10 | 东风汽车集团股份有限公司 | 一种通过附加随机噪声法对次级通路进行识别的方法 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59224913A (ja) | 1983-06-03 | 1984-12-17 | Canon Inc | 適応型線形予測方法 |
| US4939685A (en) * | 1986-06-05 | 1990-07-03 | Hughes Aircraft Company | Normalized frequency domain LMS adaptive filter |
| JP3002049B2 (ja) * | 1992-02-06 | 2000-01-24 | 松下電器産業株式会社 | 消音装置 |
| EP0517525A3 (en) * | 1991-06-06 | 1993-12-08 | Matsushita Electric Industrial Co Ltd | Noise suppressor |
| GB2281680B (en) * | 1993-08-27 | 1998-08-26 | Motorola Inc | A voice activity detector for an echo suppressor and an echo suppressor |
| JP3147207B2 (ja) | 1994-05-17 | 2001-03-19 | 日本電信電話株式会社 | 適応的未知系出力推定方法 |
| JPH08250981A (ja) | 1995-03-09 | 1996-09-27 | Fujitsu Ltd | フィルタ係数の推定装置 |
| US5590121A (en) * | 1995-03-30 | 1996-12-31 | Lucent Technologies Inc. | Method and apparatus for adaptive filtering |
| US5818945A (en) * | 1995-04-20 | 1998-10-06 | Nippon Telegraph And Telephone | Subband echo cancellation method using projection algorithm |
| JP3654470B2 (ja) * | 1996-09-13 | 2005-06-02 | 日本電信電話株式会社 | サブバンド多チャネル音声通信会議用反響消去方法 |
| JP3185709B2 (ja) * | 1997-05-19 | 2001-07-11 | 日本電気株式会社 | アダプティブフィルタおよびその適応化方法 |
| JPH1168518A (ja) | 1997-08-13 | 1999-03-09 | Fujitsu Ltd | 係数更新回路 |
| WO1999014868A1 (en) * | 1997-09-16 | 1999-03-25 | Sanyo Electric Co., Ltd. | Echo elimination method, echo canceler and voice switch |
| US6570985B1 (en) | 1998-01-09 | 2003-05-27 | Ericsson Inc. | Echo canceler adaptive filter optimization |
| US6163608A (en) * | 1998-01-09 | 2000-12-19 | Ericsson Inc. | Methods and apparatus for providing comfort noise in communications systems |
| DE19831320A1 (de) | 1998-07-13 | 2000-01-27 | Ericsson Telefon Ab L M | Digitales adaptives Filter und akustischer Echokompensator |
| US6678254B1 (en) * | 1999-05-03 | 2004-01-13 | Nortel Networks Limited | Method and communication device for optimizing echo cancellation |
| US6959167B1 (en) * | 2000-08-11 | 2005-10-25 | Scansoft, Inc. | Noise-level adaptive residual echo suppressor |
| SE0004163D0 (sv) * | 2000-11-14 | 2000-11-14 | Coding Technologies Sweden Ab | Enhancing perceptual performance of high frequency reconstruction coding methods by adaptive filtering |
| US20030005009A1 (en) * | 2001-04-17 | 2003-01-02 | Mohammad Usman | Least-mean square system with adaptive step size |
| US20040252826A1 (en) * | 2001-05-17 | 2004-12-16 | Tian Wen Shun | Echo canceller and a method of cancelling echo |
| US7212593B2 (en) * | 2003-10-14 | 2007-05-01 | Telefonaktiebolaget Lm Ericsson (Publ) | Method of and apparatus for noise whitening filtering |
-
2009
- 2009-08-24 AT AT09791826T patent/ATE542294T1/de active
- 2009-08-24 WO PCT/US2009/054726 patent/WO2010027722A1/en not_active Ceased
- 2009-08-24 EP EP09791826A patent/EP2327156B1/en not_active Not-in-force
- 2009-08-24 CN CN200980133068.4A patent/CN102132491B/zh not_active Expired - Fee Related
- 2009-08-24 JP JP2011525117A patent/JP5284475B2/ja not_active Expired - Fee Related
- 2009-08-24 US US13/060,030 patent/US8594173B2/en not_active Expired - Fee Related
- 2009-08-24 KR KR1020117006019A patent/KR101225556B1/ko not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| WO2010027722A1 (en) | 2010-03-11 |
| KR101225556B1 (ko) | 2013-01-23 |
| ATE542294T1 (de) | 2012-02-15 |
| EP2327156A1 (en) | 2011-06-01 |
| US8594173B2 (en) | 2013-11-26 |
| US20110158363A1 (en) | 2011-06-30 |
| KR20110042232A (ko) | 2011-04-25 |
| JP2012501152A (ja) | 2012-01-12 |
| EP2327156B1 (en) | 2012-01-18 |
| CN102132491A (zh) | 2011-07-20 |
| CN102132491B (zh) | 2014-07-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5284475B2 (ja) | 前白色化を伴うlmsアルゴリズムによって適応させられる適応フィルタの更新済みフィルタ係数を決定する方法 | |
| Douglas | Introduction to adaptive filters | |
| JP5671147B2 (ja) | 後期残響成分のモデリングを含むエコー抑制 | |
| US8594320B2 (en) | Hybrid echo and noise suppression method and device in a multi-channel audio signal | |
| TWI458332B (zh) | 用於回音消除及回音抑制之系統及方法 | |
| CN111199748B (zh) | 回声消除方法、装置、设备以及存储介质 | |
| US20040057574A1 (en) | Suppression of echo signals and the like | |
| WO2006111369A1 (en) | A method and device for removing echo in an audio signal | |
| JP2001501327A (ja) | ディジタル音声信号における送信チャンネルの影響のブラインド等化のためのプロセスおよび装置 | |
| JP2004349806A (ja) | 多チャネル音響エコー消去方法、その装置、そのプログラム及びその記録媒体 | |
| JP3787088B2 (ja) | 音響エコー消去方法、装置及び音響エコー消去プログラム | |
| KR100545832B1 (ko) | 간섭신호에 강인한 음향 반향 제거장치 | |
| JP2003324372A (ja) | 改善された音響エコーキャンセレーション | |
| JP5662232B2 (ja) | エコー消去装置、その方法及びプログラム | |
| JP2000323962A (ja) | 適応識別の方法と装置および、そのような方法を用いた適応反響消去器 | |
| JP3756839B2 (ja) | 反響低減方法、反響低減装置、反響低減プログラム | |
| CN109379501B (zh) | 一种用于回声消除的滤波方法及装置、设备、介质 | |
| JP3756828B2 (ja) | 反響消去方法、この方法を実施する装置、プログラムおよびその記録媒体 | |
| JP3673727B2 (ja) | 反響消去方法、その装置、そのプログラム及びその記録媒体 | |
| TWI234941B (en) | Echo canceler, article of manufacture, and method and system for canceling echo | |
| JP4413205B2 (ja) | エコー抑圧方法、装置、エコー抑圧プログラム、記録媒体 | |
| JPH09261135A (ja) | 音響エコー消去装置 | |
| JPH08331020A (ja) | エコーキャンセラ | |
| JP5013580B2 (ja) | 適応フィルタ装置、エコーキャンセラ、フィルタ係数の更新方法 | |
| JP4209348B2 (ja) | エコー抑圧方法、この方法を実施する装置、プログラムおよび記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20111024 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120925 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121101 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130514 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130529 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5284475 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |