JP5280180B2 - 車両用警報装置 - Google Patents
車両用警報装置 Download PDFInfo
- Publication number
- JP5280180B2 JP5280180B2 JP2008322382A JP2008322382A JP5280180B2 JP 5280180 B2 JP5280180 B2 JP 5280180B2 JP 2008322382 A JP2008322382 A JP 2008322382A JP 2008322382 A JP2008322382 A JP 2008322382A JP 5280180 B2 JP5280180 B2 JP 5280180B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- control means
- alarm
- reaction force
- steering angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Power Steering Mechanism (AREA)
- Emergency Alarm Devices (AREA)
- Traffic Control Systems (AREA)
- Automotive Seat Belt Assembly (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Description
また、単に、ステアリングホイールを強制的に振動させるだけでは、運転者が覚醒した際に運転姿勢を乱してしまい、不要な運転操作をおこなう虞がある。
さらに、前記警報制御手段は、前記覚醒状態判定手段により前記乗員が非覚醒状態であると判定されたときの前記乗員による前記ステアリングホイールの操舵方向と同方向に、前記往復動の初期駆動をおこなう。
さらに、前記警報制御手段は、前記往復動を偶数回の回動とする。
さらに、前記警報制御手段は、前記往復動の作動開始から前記復帰制御手段により前記反力制御手段の動作が前記通常動作に復帰する以前までの期間において、前記覚醒状態判定手段により前記乗員が非覚醒状態であると判定された時点での前記舵角に対して逆方向の舵角に対応する位置で前記ステアリングホイールの操舵位置を停止させる。
さらに、本発明の第2態様に係る車両用警報装置では、前記警報制御手段は、前記往復動の実行中に前記舵角制御手段による前記舵角の舵角方向が転向した場合に、前記往復動を奇数回の回動とする。
さらに、乗員が非覚醒状態であると判定されたときの反力制御手段の通常動作での反力に対向する方向、つまり乗員によるステアリングホイールの操舵を増大させる方向に往復動の初期駆動をおこなうことから、いわば反力制御手段の通常動作で作用していた反力が消失したような状態とすることで、乗員の注意喚起を増大させることができ、乗員の覚醒を的確に促すことができる。
さらに、往復動の作動開始前での乗員によるステアリングホイールの操舵方向と、反力制御手段による反力に対向する乗員の操作入力の操舵方向とが一致することから、乗員が操作入力に違和感を感じてしまうことを防止することができる。
さらに、反力制御手段の警報動作に応じたステアリングホイールの往復動から、乗員の操作入力により反力制御手段の通常動作に復帰する際に、乗員が非覚醒状態であると判定された時点での舵角に対応する位置からオーバーシュートが生じてしまうことを抑制し、ステアリングホイールの操舵位置を乗員が非覚醒状態であると判定された時点での舵角に対応する位置に一致させ易くすることができる。
さらに、本発明の第2態様に係る車両用警報装置によれば、舵角制御手段による舵角の舵角方向と、反力制御手段による反力に対向する乗員の操作入力の操舵方向とが一致することから、反力制御手段の動作を警報動作から通常動作に適切に復帰させることができる。
本発明の第6態様に係る車両用警報装置によれば、乗員のアクセル操作により車両が加速することで警報動作を含む各種操作が逼迫することを防止することができる。
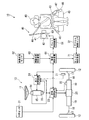
本実施の形態による車両用警報装置10は、例えば図1に示すように、運転者が操舵するステアリングホイール11と、左右の転舵輪12とが機械的に分離されている、いわゆるSBW(Steer By Wire)式の操舵装置13を搭載した車両に備えられている。そして、車両用警報装置10は、車両の乗員に対する警報出力時に、操舵装置13と、車両に搭載されたシートベルト装置40と、車両の運転状態とを制御する。
なお、外界センサ31は、例えば可視光領域や赤外線領域などにて撮像可能なカメラおよび画像処理部と、例えばレーザ光やミリ波などのレーダおよびレーダ制御部とを備えて構成されている。
これにより、運転者による操舵方向とは逆方向の操舵反力がステアリングホイール11に付与され、ステアリングホイール11と転舵輪12との間が、あたかも機械的に直接連結されているかのような操舵フィーリングが得られる。
ウェビング43は、初期状態ではリトラクタ41に巻き取られており、乗員49が引出してタングプレート47をバックル48に固定することにより、乗員49の主に胸部と腹部をシート45に対して拘束する。
このシートベルト装置40では、緊急時におけるウェビング43の引き込みが、ウェビング43を巻き取るベルトリール42を回転駆動する電動モータ50によって行われ、電動モータ50はベルト制御装置51によって駆動制御される。
警報制御装置61は、覚醒状態判定装置63から出力される判定信号に応じて、各種の警報装置(図示略)に加えて、操舵装置13の舵角制御装置23および反力制御装置24と、シートベルト装置40のベルト制御装置51と、エンジン制御装置71とを制御する。
覚醒状態判定装置63は、乗員状態センサ62から出力される検出信号に基づき、車両の乗員が、例えば居眠りや脇見などで覚醒度が低下した非覚醒状態であるか否かを判定し、この判定結果の判定信号を出力する。
なお、乗員状態センサ62は、例えば乗員の視線を検出する視線センサ(図示略)や乗員の顔の向きなどを検知するセンサ(図示略)あるいは乗員の運転操作の状態や車両の走行状態の変化などを検出する各種センサ(図示略)から出力される各検出信号に基づき、乗員の覚醒度に係る検出信号を出力する。
この場合、警報制御装置61は、反力制御装置24の警報動作の実行時に、ステアリングホイール11の往復動を偶数回の回動とする。
さらに、警報制御装置61は、ステアリングホイール11の往復動の作動開始から反力制御装置24の動作が通常動作に復帰する以前までの期間において、覚醒状態判定装置63により乗員が非覚醒状態であると判定された時点での転舵角に対して往復動での最終の回動方向側にずれた転舵角に対応する位置(つまり、乗員が非覚醒状態であると判定された時点での操舵方向の逆方向の転舵角に対応する位置)でステアリングホイール11の操舵位置を停止させるように反力制御装置24による操舵反力を設定する。
なお、警報制御装置61は、反力制御装置24の警報動作でのステアリングホイール11の往復動の実行中に舵角制御装置23による転舵角の舵角方向が転向した場合には、ステアリングホイール11の往復動を奇数回の回動とする。
そして、覚醒状態判定装置63により乗員が非覚醒状態であると判定された場合には、図2(B)に示すように、この時点での乗員によるステアリングホイール11の操舵角および操舵方向と、この時点で舵角制御装置23により制御される転舵角とが記憶される。
反力制御装置24の警報動作に伴うステアリングホイール11の往復動は、舵角制御装置23による転舵角の舵角方向が転向した場合には奇数回の回動とされ、舵角制御装置23による転舵角の舵角方向が転向しない場合には偶数回の回動とされ、例えば偶数回の回動では、図2(B)に示す操舵位置から、順次、図2(C)に示す操舵位置と、図2(D)に示す操舵位置とを経て、再び図2(B)に示す操舵位置に至る。
そして、ステアリングホイール11の操舵位置を所定時間に亘って停止させる状態において、乗員の操作入力が発生しない場合には、シートベルト装置40のベルト制御装置51を制御して、ウェビング43に所定の張力を発生させて乗員が知覚可能な締め付け力を作用させる。なお、このとき、シートベルト装置40に限らず、さらに、各種の警報装置(図示略)による警報の程度を増大させてもよい。
さらに、ステアリングホイール11の往復動に抗する乗員の操作入力の操舵角が、舵角制御装置23により制御される転舵角に対応する値と一致した場合に、反力制御装置24の警報動作の実行を停止することから、反力制御装置24による警報動作の実行を適切なタイミングで停止することができ、反力制御装置24の動作を警報動作から通常動作に速やかに復帰させることができる。
さらに、ステアリングホイール11の往復動に抗する乗員の操作入力によって、舵角制御装置23の目標転舵角を超える必要以上の操舵を低減するように反力制御装置24による操舵反力を増大させることにより、車両が不適切な方向に操向されることを抑制することができる。
さらに、反力制御装置24の警報動作の実行中には、乗員のアクセル操作を無効とすることにより、車両が不必要に加速することで警報動作を含む各種操作が逼迫することを防止することができる。
11 ステアリングホイール
14 操舵角センサ(操作量検出手段)
23 舵角制御装置(舵角制御手段)
24 反力制御装置(反力制御手段)
31 外界センサ
40 シートベルト装置(警報手段)
61 警報制御装置(警報制御手段、復帰制御手段、待機制御手段、アクセル制御手段)
63 覚醒状態判定装置(覚醒状態判定手段)
Claims (6)
- 車両の外界を検知する外界センサから出力される検知信号に基づき車両の舵角を制御する舵角制御手段と、
前記舵角制御手段により制御される前記舵角の変化に応じてステアリングホイールに反力を発生させる動作を通常動作として実行する反力制御手段と、
前記ステアリングホイールの操作量を検出する操作量検出手段と、
車両の乗員が覚醒状態であるか否かを判定する覚醒状態判定手段とを備える車両用警報装置であって、
前記舵角制御手段により前記舵角が制御されている状態で前記覚醒状態判定手段により前記乗員が非覚醒状態であると判定された場合に、前記舵角制御手段による前記舵角の制御を継続しつつ、前記反力制御手段により前記舵角とは独立して前記ステアリングホイールを往復動させる動作を警報動作として実行させる警報制御手段と、
前記警報制御手段により制御された前記反力制御手段による前記ステアリングホイールの前記往復動に抗する前記乗員の操作入力が発生した場合に、前記反力制御手段の動作を前記警報動作から前記通常動作に復帰させる復帰制御手段と、
を備え、
前記警報制御手段は、前記覚醒状態判定手段により前記乗員が非覚醒状態であると判定されたときの前記乗員による前記ステアリングホイールの操舵方向と同方向に、前記往復動の初期駆動をおこない、
前記警報制御手段は、前記往復動を偶数回の回動とし、
前記警報制御手段は、前記往復動の作動開始から前記復帰制御手段により前記反力制御手段の動作が前記通常動作に復帰する以前までの期間において、前記覚醒状態判定手段により前記乗員が非覚醒状態であると判定された時点での前記舵角に対して逆方向の舵角に対応する位置で前記ステアリングホイールの操舵位置を停止させることを特徴とする車両用警報装置。 - 前記警報制御手段は、前記往復動の実行中に前記舵角制御手段による前記舵角の舵角方向が転向した場合に、前記往復動を奇数回の回動とすることを特徴とする請求項1に記載の車両用警報装置。
- 前記警報制御手段は、前記往復動に抗する前記操作入力での前記操作量検出手段により検出される前記操作量が、前記舵角制御手段により制御される前記舵角に対応する値と一致した場合に、前記反力制御手段による前記警報動作の実行を停止することを特徴とする請求項1または請求項2に記載の車両用警報装置。
- 前記警報制御手段は、前記往復動が所定回数繰り返された後に、所定時間に亘って前記舵角制御手段による前記舵角の制御とは独立して前記反力制御手段による前記反力を制御する動作を待機動作として実行させる待機制御手段を備え、前記待機制御手段による前記待機動作の実行中に前記往復動に抗する前記操作入力が発生しない場合に警報手段を駆動することを特徴とする請求項1から請求項3の何れかひとつに記載の車両用警報装置。
- 前記警報制御手段は、前記往復動に抗する前記操作入力が発生した後に前記操作量検出手段により検出される前記操作量に対応する舵角が、前記舵角制御手段により制御される前記舵角の制御目標に対して乖離する場合に、前記制御目標を超える操舵を低減するように前記反力制御手段による前記ステアリングホイールの前記反力を増大させることを特徴とする請求項1から請求項4の何れかひとつに記載の車両用警報装置。
- 前記往復動の実行開始から前記復帰制御手段により前記反力制御手段の動作が前記通常動作に復帰する以前までの期間に亘ってアクセル操作を無効とするアクセル制御手段を備えることを特徴とする請求項1から請求項5の何れかひとつに記載の車両用警報装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008322382A JP5280180B2 (ja) | 2008-12-18 | 2008-12-18 | 車両用警報装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008322382A JP5280180B2 (ja) | 2008-12-18 | 2008-12-18 | 車両用警報装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010143382A JP2010143382A (ja) | 2010-07-01 |
| JP5280180B2 true JP5280180B2 (ja) | 2013-09-04 |
Family
ID=42564262
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008322382A Expired - Fee Related JP5280180B2 (ja) | 2008-12-18 | 2008-12-18 | 車両用警報装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5280180B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6650327B2 (ja) * | 2016-04-04 | 2020-02-19 | 株式会社東海理化電機製作所 | 自動運転支援装置 |
| JP7272257B2 (ja) * | 2019-12-19 | 2023-05-12 | トヨタ自動車株式会社 | 車両制御装置 |
| JP7339204B2 (ja) * | 2020-04-15 | 2023-09-05 | トヨタ自動車株式会社 | 操舵制御システム |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3094834B2 (ja) * | 1995-03-30 | 2000-10-03 | 三菱自動車工業株式会社 | 覚醒度低下警告装置 |
| JP3235522B2 (ja) * | 1997-07-22 | 2001-12-04 | トヨタ自動車株式会社 | 走行レーン逸脱警報装置 |
| JPH11139335A (ja) * | 1997-11-12 | 1999-05-25 | Toyota Motor Corp | 車両の走行支援装置 |
| JP3835222B2 (ja) * | 2001-09-10 | 2006-10-18 | 日産自動車株式会社 | 車線逸脱対応装置 |
| JP4358485B2 (ja) * | 2002-06-28 | 2009-11-04 | 株式会社ジェイテクト | 車両用操舵装置 |
| JP4578795B2 (ja) * | 2003-03-26 | 2010-11-10 | 富士通テン株式会社 | 車両制御装置、車両制御方法および車両制御プログラム |
| JP4294401B2 (ja) * | 2003-07-25 | 2009-07-15 | 富士重工業株式会社 | 車両用走行支援装置 |
| JP2006331323A (ja) * | 2005-05-30 | 2006-12-07 | Toyota Motor Corp | 車両逸脱警報装置 |
| JP4904787B2 (ja) * | 2005-11-29 | 2012-03-28 | 日産自動車株式会社 | 車両用操舵制御装置 |
| JP4907407B2 (ja) * | 2007-03-30 | 2012-03-28 | 本田技研工業株式会社 | 車両の走行安全装置 |
-
2008
- 2008-12-18 JP JP2008322382A patent/JP5280180B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010143382A (ja) | 2010-07-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11358594B2 (en) | Lane change assist device | |
| EP3418161B1 (en) | Steering assist system | |
| US10600324B2 (en) | Lane change assist device | |
| JP6593607B2 (ja) | 車両制御装置 | |
| CN113734159B (zh) | 用于车辆的控制设备和车辆的控制方法 | |
| JP6822309B2 (ja) | 自動運転支援装置および自動運転支援方法 | |
| KR101249177B1 (ko) | 차량의 제어 장치 | |
| JP2009096349A (ja) | 車両用運転支援装置 | |
| WO2004058546A1 (ja) | 車両用安全装置 | |
| CN103635362A (zh) | 用于控制机动车中的安全带的可逆的安全带收紧器的方法 | |
| US20220017145A1 (en) | Vehicle control apparatus | |
| JP5280180B2 (ja) | 車両用警報装置 | |
| CN111746626A (zh) | 车辆的控制装置与控制方法 | |
| JP4818762B2 (ja) | 運転支援装置 | |
| JP2010254050A (ja) | 車両の制御装置 | |
| JP2007290560A (ja) | 乗員保護装置の作動制御装置 | |
| JP2007245952A (ja) | 運転支援装置 | |
| US12084108B2 (en) | Lane departure suppression device | |
| US20230060221A1 (en) | Lane departure suppression device | |
| JP7572289B2 (ja) | 車線維持支援制御装置 | |
| US12097846B2 (en) | Vehicle collision avoidance assist apparatus | |
| US20240317224A1 (en) | Vehicle driving assistance apparatus | |
| CN116279342A (zh) | 防撞辅助装置 | |
| CN115071743A (zh) | 驾驶辅助装置 | |
| JP2022164236A (ja) | 車線維持支援制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101125 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120928 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121016 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121214 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130205 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130408 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130522 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5280180 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |