JP5241806B2 - 表面輪郭測定のための装置および方法 - Google Patents
表面輪郭測定のための装置および方法 Download PDFInfo
- Publication number
- JP5241806B2 JP5241806B2 JP2010267905A JP2010267905A JP5241806B2 JP 5241806 B2 JP5241806 B2 JP 5241806B2 JP 2010267905 A JP2010267905 A JP 2010267905A JP 2010267905 A JP2010267905 A JP 2010267905A JP 5241806 B2 JP5241806 B2 JP 5241806B2
- Authority
- JP
- Japan
- Prior art keywords
- source
- radiation
- fringe
- sources
- pattern
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
- G01B11/2509—Color coding
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/2441—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures using interferometry
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
- G01B11/2518—Projection by scanning of the object
- G01B11/2527—Projection by scanning of the object with phase change by in-plane movement of the patern
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
- G01B11/2531—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object using several gratings, projected with variable angle of incidence on the object, and one detection device
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Description
本願は、1996年2月12日に出願された米国特許第5,870,191号の一部継続出願である、1999年2月2日に出願された米国特許出願第09/241,354号の一部継続出願であり、そして1998年6月4日に出願された米国仮特許出願第60/087,960号の優先権を主張する。
本明細書に記載する研究は、米国空軍によって授与された、連邦契約第F19628−95−L−002によって援助された。政府は本発明に特定の権利を有し得る。
本発明は、表面測定の分野に関し、具体的には、非接触表面測定の分野に関する。
寸法計測学、すなわち、オブジェクトのサイズおよび形状の測定は、マシーンが、ほとんどの製造および多くのサブアセンブリから構成される複雑なオブジェクトのアセンブリを実行する、今日の製造環境において非常に重要である。構成要素が適切に嵌合し合うことを保証するには、自動車などの複雑なアセンブリの各構成要素の形状およびサイズの公差を小さく保持する必要がある。
本発明は、表面を有するオブジェクト上において、上記オブジェクトの表面上のポイントの三次元位置情報を判定する方法に関する。上記方法は、スペクトル領域の空間分布を有する2つの放射ソースを提供する工程;上記ソースそれぞれからの放射で上記表面を照射して、上記表面上の第1の位置に第1の縞パターンを生成する工程;上記第1の縞パターンを第2の位置に移動させる工程;上記第1の縞パターンの上記第1の位置および上記第2の位置に応じて、第1のラップされたサイクルマップを生成する工程;上記第1の縞パターン中の縞数を推定する工程;上記第1の縞パターンを変更して、第1の位置において第2の縞パターンを生成する工程;上記第2の縞パターンを第2の位置に移動させる工程;上記第2の縞パターンの上記第1の位置および上記第2の位置に応じて、第2のラップされたサイクルマップを生成する工程;上記第1の縞パターン中の推定された縞数に応じて、上記第2の縞パターン中の縞数を推定する工程;および上記第2の縞パターンおよび上記第2のラップされたサイクルマップ中の推定された縞数に応じて、上記ポイントの上記表面上での三次元位置情報を判定する工程を含む。
(項目1) 表面を有するオブジェクト上において、該オブジェクトの表面上のポイントの三次元位置情報を判定する方法であって、
a)スペクトル領域の空間分布を有する2つの放射ソースを提供する工程と、
b)該ソースそれぞれからの放射で該表面を照射して、該表面上の第1の位置に第1の縞パターンを生成する工程と、
c)該第1の縞パターンを第2の位置に移動させる工程と、
d)該第1の縞パターンの第1の位置および第2の位置に応答して、第1のラップされたサイクルマップを生成する工程と、
e)該第1の縞パターン中の縞数を推定する工程と、
f)該第1の縞パターンを変更して、第1の位置において第2の縞パターンを生成する工程と、
g)該第2の縞パターンを第2の位置に移動させる工程と、
h)該第2の縞パターンの第1の位置および第2の位置に応答して、第2のラップされたサイクルマップを生成する工程と、
i)該第1の縞パターン中の推定された縞数に応答して、該第2の縞パターン中の縞数を推定する工程と、
j)該第2のラップされたサイクルマップおよび該第2の縞パターン中の推定された縞数に応答して、該ポイントの該表面上での三次元位置情報を判定する工程と、
を包含する、方法。
(項目2) 前記2つの放射ソースは互いにコヒーレントである、項目1に記載の方法。
(項目3) 前記2つの放射ソースは、狭帯域であるスペクトル分布を有する、項目1に記載の方法。
(項目4) 前記2つの放射ソースを提供する工程は、単一の放射ソースからの放射を分割する工程を包含する、項目1に記載の方法。
(項目5) 前記2つの放射ソースを提供する工程は、2つのレーザ放射ソースを提供する工程を包含する、項目1に記載の方法。
(項目6) 前記第1の縞パターンおよび第2の縞パターン中の縞数を推定する工程は、数学的モデルを適用する工程を包含する、項目1に記載の方法。
(項目7) 前記第1の縞パターンおよび第2の縞パターン中の縞数を推定する工程は、線形の推定モデルを適用する工程を包含する、項目1に記載の方法。
(項目8) 前記第1の縞パターンおよび第2の縞パターン中の縞数を推定する工程は、異なる表面について判定された三次元位置情報を適用する工程を包含する、項目1に記載の方法。
(項目9) 前記ソースの1つのスペクトル領域はそれぞれ、該ソースの残りの各スペクトル領域から、該スペクトル領域の各波長に比例する各距離の分だけ隔離される、項目1に記載の方法。
(項目10) 前記距離は、前記スペクトル領域の波長に線形比例する、項目9に記載の方法。
(項目11) 前記第1の縞パターンを変更する工程は、前記スペクトル領域それぞれを、該スペクトル領域の残りに対してある距離の分だけ隔離する工程を包含する、項目1に記載の方法。
(項目12) 前記距離は、2つのスペクトル領域の各々から等距離である中間点を含み、該スペクトルの領域それぞれを隔離する工程は、該距離を変更して該中間点を固定状態にする工程を包含する、項目11に記載の方法。
(項目13) 前記第2の縞パターンを移動させる工程は、前記ソースの1つからの前記空間分布中のスペクトル領域の位相を、該ソースの残りからの空間分布中の各スペクトル領域の位相に対して変化させる工程を包含する、項目1に記載の方法。
(項目14) 表面上の所定の間隔の縞パターンに対応するラップされたサイクルマップを合成する方法であって、
a)スペクトル領域の空間分布を有する2つの放射ソースを提供する工程と、
b)該ソースそれぞれからの放射で該表面を照射して、該表面上の第1の位置に第1の縞パターンを生成する工程と、
c)該第1の縞パターンを該表面上の第2の位置に移動させる工程と、
d)該第1の縞パターンの第1の位置および第2の位置に応答して、第1のラップされたサイクルマップを生成する工程と、
e)該第1の縞パターンを変更して、第1の位置において第2の縞パターンを生成する工程と、
f)該第2の縞パターンを第2の位置に移動させる工程と、
g)該第2の縞パターンの第1の位置および第2の位置に応答して、第2のラップされたサイクルマップを生成する工程と、
h)該第1のラップされたサイクルマップから該第2のラップされたサイクルマップを減算する工程と、
i)該第2のラップされたサイクルマップと該第1のラップされたサイクルマップとの間の差をラップして、該所定の間隔の縞パターンに対応するラップされたサイクルマップを生成する工程と、
を包含する、方法。
(項目15) 前記2つの放射ソースは互いにコヒーレントである、項目14に記載の方法。
(項目16) 前記2つの放射ソースは、狭帯域であるスペクトル分布を有する、項目14に記載の方法。
(項目17) 前記2つの放射ソースを提供する工程は、単一の放射ソースからの放射を分割する工程を包含する、項目14に記載の方法。
(項目18) 前記2つの放射ソースを提供する工程は、2つのレーザ放射ソースを提供する工程を包含する、項目14に記載の方法。
(項目19) 前記ソースの1つのスペクトル領域はそれぞれ、該ソースの残りの各スペクトル領域から、該スペクトル領域の各波長に比例する距離の分だけ隔離される、項目14に記載の方法。
(項目20) 前記距離は、前記スペクトル領域の波長に線形比例する、項目19に記載の方法。
(項目21) 前記第1の縞パターンを変更する工程は、前記スペクトル領域それぞれを、該スペクトル領域の残りに対してある距離の分だけ隔離する工程を包含する、項目14に記載の方法。
(項目22) 前記距離は、2つのスペクトル領域の各々から等距離である中間点を含み、該スペクトルの領域それぞれを隔離する工程は、該距離を変更して該中間点を固定状態にする工程を包含する、項目21に記載の方法。
(項目23) 前記第2の縞パターンを移動させる工程は、前記ソースの1つからの前記空間分布中のスペクトル領域の位相を、該ソースの残りからの空間分布中の各スペクトル領域の位相に対して変化させる工程を包含する、項目14に記載の方法。
(項目24) 前記2つの放射ソースは第1の周波数を有し、前記第1の縞パターンを変更して第2の縞パターンを生成する工程は、該第1の周波数を第2の周波数に変更する工程を包含する、項目14に記載の方法。
(項目25) 表面を有するオブジェクト上において、該オブジェクトの表面上のポイントの三次元位置情報を判定する方法であって、
a)第1の周波数を有しかつ互いにコヒーレントな第1の放射ビームおよび第2の放射ビームを生成する工程と、
b)該表面を該第2の放射ビームで照射する工程と、
c)該第1の放射ビームと、該第2の放射ビームからの放射とが該表面によって散乱するのに応答して、第1の位置において第1の干渉パターンを生成する工程と、
d)該第1の干渉パターンを第2の位置に移動させる工程と、
e)該第1の干渉パターンの第1の位置および第2の位置に応答して、第1のラップされたサイクルマップを生成する工程と、
f)該第1の干渉パターン中の強度サイクルを推定する工程と、
g)該第1の干渉パターンを変更して、第2の干渉パターンを第1の位置において生成する工程と、
h)該第2の干渉パターンを第2の位置に移動させる工程と、
i)該第2の干渉パターンの第1の位置および第2の位置に応答して、第2のラップされたサイクルマップを生成する工程と、
j)該第1の干渉パターン中の推定された強度サイクルに応答して、該第2の干渉パターン中の強度サイクルを推定する工程と、
k)該第2のラップされたサイクルマップおよび該第2の干渉パターン中の推定された強度サイクルに応答して、該三次元位置情報を計算する工程と、を包含する、方法。
(項目26) 前記第1の干渉パターンを変更して第2の干渉パターンを生成する工程は、前記第1の周波数を第2の周波数に変更する工程を包含する、項目25に記載の方法。
(項目27) 前記表面をイメージ面上にイメージングする工程をさらに包含する、項目25に記載の方法。
(項目28) 前記イメージ面は検出器を含む、項目27に記載の方法。
(項目29) 表面を有するオブジェクト上において、該オブジェクトの表面上のポイントの三次元位置情報を判定する方法であって、
a)互いにコヒーレントな第1の放射ビームおよび第2の放射ビームを生成する工程と、
b)該表面を該第2の放射ビームで照射する工程と、
c)該第1の放射ビームと、該第2の放射ビームからの放射とが該表面によって散乱するのに応答して、第1の干渉パターンを生成する工程と、
d)該第1の放射ビームおよび第2の放射ビームのうちの1つを、該第1の放射ビームおよび第2の放射ビームのもう一方に対して位相シフトさせて、第1の位相シフトした干渉パターンを生成する工程と、
e)該第1の干渉パターンおよび該第1の位相シフトした干渉パターンに応答して、第1のラップされたサイクルマップを生成する工程と、
f)該第1の干渉パターンを変更して、第2の干渉パターンを生成する工程と、
g)該第1の放射ビームおよび第2の放射ビームのうちの1つを、該第1の放射ビームおよび第2の放射ビームのもう一方に対して位相シフトさせて、第2の位相シフトした干渉パターンを生成する工程と、
h)該第2の干渉パターンおよび該第2の位相シフトした干渉パターンに応答して、第2のラップされたサイクルマップを生成する工程と、
i)該第2のラップされたサイクルマップを該第1のラップされたサイクルマップから減算する工程と、
j)該第2のラップされたサイクルマップと、該第1のラップされたサイクルマップとの間の差をラップして、ラップされたサイクルマップを生成する工程と、を包含する、方法。
(項目30) 前記第1の放射ビームおよび第2の放射ビームは第1の周波数を有し、前記第1の干渉パターンを変更して第2の干渉パターンを生成する工程は、該第1の周波数を第2の周波数に変更する工程を包含する、項目29に記載の方法。
(項目31) 前記ラップされたサイクルマップを用いることによって三次元位置情報を判定する工程をさらに包含する、項目29に記載の方法。
(項目32) 前記表面をイメージ面上にイメージングする工程をさらに包含する、項目29に記載の方法。
(項目33) 前記イメージ面は検出器を含む、項目32に記載の方法。
(項目34) 縞をオブジェクトの表面上に投射する装置であって、
a)スペクトル分布を有する2つの放射ソースと、
b)該2つのソースと光学的に連絡するコリメータであって、2つの広帯域放射の実質的に平行なビームを生成するコリメータと、
c)該コリメータと光学的に連絡する回折性格子と、
d)該回折性格子と光学的に連絡するレンズであって、スペクトル領域の空間分布を有する2つの放射イメージを生成するレンズと、
を備える、装置。
(項目35) 前記ソースの1つのスペクトル領域はそれぞれ、該ソースの残りの各スペクトル領域から、該スペクトル領域の各波長に比例する各距離の分だけ隔離される、項目34に記載の装置。
(項目36) 前記距離は、前記スペクトル領域の波長に線形比例する、項目35に記載の装置。
(項目37) 前記距離は、2つのスペクトル領域の各々から等距離である中間点を含み、該中間点は固定される、項目35に記載の装置。
(項目38) 前記2つの放射ソースは互いにコヒーレントである、項目34に記載の装置。
(項目39) 前記2つの放射ソースは、狭帯域であるスペクトル分布を有する、項目34に記載の装置。
(項目40) 前記オブジェクトの表面上のポイントの三次元位置情報を判定する検出器をさらに備える、項目34に記載の装置。
(項目41) 前記2つの放射ソースは単一の放射ソースから生成される、項目34に記載の装置。
(項目42) 前記回折性格子に結合されたトランスレータをさらに備え、該トランスレータは、前記スペクトル領域の1つの該スペクトル領域の残りに対する相対的位相をシフトさせる、項目34に記載の装置。
(項目43) 縞をオブジェクトの表面上に投射する方法であって、
a)ある距離だけ隔離された2つの放射ソースを提供する工程であって、該ソースはそれぞれ、スペクトル分布を有する放射を生成する、工程と、
b)該放射を平行にして、2つの実質的に平行な放射ビームを生成する工程と、
c)該平行な放射ビームのスペクトル成分を描写する工程と、
d)スペクトル成分の空間分布を有する2つのイメージ放射を生成する工程と、を包含する、方法。
(項目44) 前記空間分布の1つのスペクトル成分はそれぞれ、該空間分布の残りの各スペクトル成分から、該スペクトル成分の各波長に比例する距離だけ隔離される、項目43に記載の方法。
(項目45) 前記距離は、前記スペクトル成分の波長に線形比例する、項目44に記載の方法。
(項目46) 前記距離は、2つのスペクトル成分の各々から等距離である中間点を含み、該中間点は固定される、項目44に記載の方法。
(項目47) 前記2つの放射ソースは互いにコヒーレントである、項目43に記載の方法。
(項目48) 前記2つの放射ソースは、狭帯域であるスペクトル分布を有する、項目43に記載の方法。
(項目49) 前記オブジェクトの表面上のポイントの三次元位置情報を判定する工程をさらに包含する、項目43に記載の方法。
(項目50) 前記2つの放射ソースを提供する工程は、単一の放射ソースからの放射を分割する工程を包含する、項目43に記載の方法。
(項目51) 前記スペクトル成分の1つの該スペクトル成分の残りに対する相対的位相をシフトさせる工程をさらに包含する、項目43に記載の方法。
(項目52) 表面を有するオブジェクト上において、該オブジェクトの表面上のポイントの三次元位置情報を判定する方法であって、
a)第1の周期的パターンを投射して、該表面上の第1の位置において第1の投射パターンを生成する工程と、
b)該第1の投射パターンを第2の位置に移動させる工程と、
c)該第1の投射パターンの第1の位置および第2の位置に応答して、第1のラップされたサイクルマップを生成する工程と、
d)該第1の投射パターン中のサイクル数を推定する工程と、
e)該第1の投射パターンを変更して、該第1の位置において第2の投射パターンを生成する工程と、
f)該第2の投射パターンを該第2の位置に移動させる工程と、
g)該第2の投射パターンの第1の位置および第2の位置に応答して、第2のラップされたサイクルマップを生成する工程と、
h)該第1の投射パターン中の推定されたサイクル数に応答して、該第2の投射パターン中のサイクル数を推定する工程と、
i)該第2の投射パターン中の推定されたサイクル数および該第2のラップされたサイクルマップに応答して、該表面を判定する工程と、
を包含する、方法。
(項目53) 前記第1の投射パターンを変更する工程は、第2の周期的パターンを投射して、第2の投射パターンを第1の位置において生成する工程を包含する、項目52に記載の方法。
(項目54) 表面上に投射された所定の間隔の周期的パターンに対応するラップされたサイクルマップを合成する方法であって、
a)第1の周期的パターンを投射して、該表面上の第1の位置において第1の投射パターンを生成する工程と、
b)該第1の投射パターンを、該表面上の第2の位置に移動させる工程と、
c)該第1の投射パターンの第1の位置および第2の位置に応答して、第1のラップされたサイクルマップを生成する工程と、
d)該第1の投射パターンを変更して、第2の投射パターンを第1の位置において生成する工程と、
e)該第2の投射パターンを該第2の位置に移動させる工程と、
f)該第2の投射パターンの第1の位置および第2の位置に応答して、第2のラップされたサイクルマップを生成する工程と、
g)該第1のラップされたサイクルマップから該第2のラップされたサイクルマップを減算する工程と、
h)該第2のラップされたサイクルマップと該第1のラップされたサイクルマップとの間の差をラップして、該投射された所定の間隔の周期的パターンに対応するラップされたサイクルマップを生成する工程と、
を包含する、方法。
(項目55) 前記第1の投射パターンを変更する工程は、第2の周期的パターンを投射して、第2の投射パターンを第1の位置において生成する工程を包含する、項目54に記載の方法。
(項目56) スペックルがオブジェクトの表面上のポイントの測定に与える影響を軽減する方法であって、
a)コヒーレントな縞パターンを生成する工程と、
b)該コヒーレントな縞パターンが該オブジェクトの表面を実質的にかすめるように、該縞パターンを光路に沿って該オブジェクトの表面に投射する工程と、
c)該オブジェクトの表面のイメージ中の該縞パターンおよび該スペックルを検出する工程であって、該オブジェクトの表面に対する法線は該光路に実質的に直交する、工程と、
を包含する、方法。
(項目57) 前記コヒーレントな縞パターンは、前記オブジェクトの表面に対して0〜45°の角度で該オブジェクトの表面を実質的にかすめる、項目56に記載の方法。
(項目58) 2つの放射ソースを提供する工程をさらに包含する、項目56に記載の方法。
(項目59) 前記2つのソースは、前記オブジェクトの表面の上側に配置される、項目58に記載の方法。
(項目60) 前記2つのソースは、前記オブジェクトの表面に対する法線に沿って実質的に垂直に整列されている、項目58に記載の方法。
(項目61) 前記縞パターンは2つのソースによって生成される、項目56に記載の方法。
(項目62) 前記2つのソースは互いにコヒーレントである、項目61に記載の方法。
(項目63) 前記2つのソースはレーザソースである、項目61に記載の方法。
(項目64) 前記2つのソースは、単一のソースを分割することによって生成される、項目61に記載の方法。
(項目65) スペックルがオブジェクトの表面上のポイントの測定に与える影響を軽減する方法であって、
a)ある距離だけ隔離された2つの放射ソースからコヒーレントな縞パターンを生成する工程と、
b)該コヒーレントな縞パターンを該オブジェクトの表面上に投射する工程と、
c)該オブジェクトの表面のイメージ内において該縞パターンおよび該スペックルを検出する工程と、
d)該縞パターンが実質的に静止状態でありかつ該スペックルが変化するように、該2つのソースを平行移動させる工程と、
e)該オブジェクトの表面のイメージにおいて、新規の縞パターンと、該変化したスペックルとを検出する工程と、
f)該検出された縞パターンおよび該スペックルの変化に応答して、実質的にスペックルの発生が無い状態で該縞パターンを判定する工程と、
を包含する、方法。
(項目66) 工程d)および工程e)を繰り返し反復する工程をさらに包含する、項目65に記載の方法。
(項目67) 前記2つの放射ソースはレーザ放射である、項目65に記載の方法。
(項目68) スペックルがオブジェクトの表面上のポイントの測定に与える影響を軽減する方法であって、
a)ある距離だけ隔離された2つの放射ソースからコヒーレントな縞パターンを生成する工程と、
b)該コヒーレントな縞パターンを該オブジェクトの表面上に投射する工程と、
c)該オブジェクトの表面のイメージ内において該縞パターンおよび該スペックルを検出する工程と、
d)該オブジェクトを該2つの放射ソースに対して側方に該縞パターンの等位相面に平行な経路に沿って平行移動させて、該縞パターンが該オブジェクトの表面に対して実質的に静止状態でありかつ該スペックルが変化するようにする工程と、
e)該オブジェクトの表面のイメージにおいて、新規の縞パターンと、該変化したスペックルとを検出する工程と、
f)該検出された縞パターンおよび該スペックルの変化に応答して、実質的にスペックルの発生が無い状態で該縞パターンを判定する工程と、
を包含する、方法。
(項目69) 工程d)および工程e)を繰り返し反復する工程をさらに包含する、項目68に記載の方法。
(項目70) 前記2つの放射ソースはレーザ放射である、項目68に記載の方法。
(項目71) スペックルがオブジェクトの表面上のポイントの測定に与える影響を軽減する方法であって、
a)該オブジェクトの表面上にコヒーレントな縞パターンを投射する工程と、
b)透過関数を有するレンズを提供する工程であって、該透過関数は該レンズの端部において徐々の透過低下を有する、工程と、
c)該オブジェクトの表面のイメージ内に該縞パターンを検出する工程であって、該透過関数は、該スペックルが該測定に与える影響を実質的に低減する、工程と、
を包含する、方法。
(項目72) スペックルがオブジェクトの表面上のポイントの測定に与える影響を軽減する方法であって、
a)第1の周波数を有しかつある距離だけ隔離された2つの放射ソースから第1の縞パターンを生成する工程と、
b)該第1の周波数を第2の周波数に変更することにより、該第1の縞パターンを変更して第2の縞パターンを生成する工程と、
c)該第1の周波数と該第2の周波数との間の差に応答して該距離を変更する工程であって、該第1の周波数と該第2の周波数との間の差に対する該距離の比は実質的に一定である、工程と、
を包含する、方法。
(項目73) 縞をオブジェクトの表面上に投射する方法であって、
a)ある距離だけ隔離された2つの放射ソースを提供する工程であって、該ソースはそれぞれ、スペクトル分布を有し、他方のソースに対してコヒーレントである、工程と、
b)該オブジェクトの表面上のポイントを、該ソースそれぞれからの放射によって照射する工程と、
c)該ソースの1つを他方のソースに対して移動させる工程と、
d)該オブジェクトの表面上のポイントによって散乱された放射を検出する工程と、
を包含する、方法。
(項目74) 前記ソースの移動と、前記オブジェクトの表面上のポイントによって散乱された検出された放射とに応答して位置情報を計算する工程をさらに包含する、項目73に記載の方法。
(項目75) 前記ソースの1つからのスペクトル分布中のスペクトル成分の位相を、該ソースのうちの他方のソースからのスペクトル分布中の各スペクトル成分の位相を前記オブジェクトの表面上のポイントにおいて測定した値に対して変化させる工程をさらに包含する、項目73に記載の方法。
(項目76) 前記ソースの1つを該ソースのうちの他方のソースに対して移動させる工程は、該ソースのうちの1つのスペクトル成分と該ソースのうちの他方のソースの各スペクトル成分との間の距離を変化させて、該ソースの各スペクトル成分間の距離を変化させる工程を包含する、項目73に記載の方法。
(項目77) 前記距離は、前記ソースのスペクトル成分の各々から等距離である中間点を含み、該ソースのうちの1つを該ソースのうちの他方のソースに対して移動させる工程は、該ソースのうちの1つのスペクトル成分と、該ソースのうちの他方のソースの各スペクトル成分との間の距離を変化させて、該ソースの各スペクトル成分間の距離を変化させ、該中間点を固定状態に保持する工程を包含する、項目76に記載の方法。
(項目78) 前記オブジェクトの表面上のポイントの三次元位置情報を判定する工程をさらに包含する、項目73に記載の方法。
(項目79) 前記2つの放射ソースを提供する工程は、
a)あるスペクトル幅を有する初期放射ビームを提供する工程と、
b)該初期ビーム放射から、第1の放射ビームを第1のビーム角度においてかつ第2の放射ビームを第2のビーム角度において生成する工程と、
c)該第1の放射ビームおよび該第2の放射ビームをイメージングして、該2つの放射ソースを形成する工程と、
を包含する、項目73に記載の方法。
(項目80) 前記初期ビーム放射を振幅変調する工程をさらに包含する、項目79に記載の方法。
(項目81) 前記第1の放射ビームおよび第2の放射ビームを生成する工程は、音響フィールドによる音響光学変調を前記初期ビームに行う工程を包含する、項目79に記載の方法。
(項目82) 前記音響光学変調を行う工程は、前記音響フィールドに位相変調を行う工程を包含する、項目81に記載の方法。
(項目83) 前記音響光学変調を行う工程は、前記音響フィールドを振幅変調する工程を包含する、項目81に記載の方法。
(項目84) 前記ソースのうちの1つを該ソースのうちの他方のソースに対して移動させる工程は、音響フィールドに周波数変調を行うことによって前記初期ビームに音響光学変調を行う工程を包含する、項目73に記載の方法。
(項目85)
a)ある距離だけ隔離された2つの放射ソースであって、該ソースはそれぞれ、スペクトル分布を有し、該ソースのうちの他方のソースに対してコヒーレントである、放射ソースと、
b)該ソースの各々を該ソースのうちの他方のソースに対して移動させる制御システムと、
c)オブジェクトの表面上のポイントから散乱した放射を受信するような位置に配置された検出器と、
を備える、縞をオブジェクトの表面上に投射する装置。
(項目86) 前記検出器からの信号を受信するプロセッサをさらに備え、該プロセッサは、前記ソースの移動と、前記オブジェクトの表面上のポイントから散乱した受信された放射とに応答して位置情報を計算する、項目85に記載の装置。
(項目87) 前記制御システムは、前記放射ソースの1つからのスペクトル分布中のスペクトル成分の位相を、該放射ソースのうちの他方の放射ソースからのスペクトル分布中の各スペクトル成分の位相を前記オブジェクトの表面上のポイントにおいて測定した値に対して変化させる、項目85に記載の装置。
(項目88) 前記制御システムは、前記放射ソースのうちの1つの各スペクトル成分を、該放射ソースのうちの他方のソースの各スペクトル成分に対して移動させて、該2つの放射ソースの各スペクトル成分間の距離を変化させる、項目85に記載の装置。
(項目89) 前記距離は、前記ソースのスペクトル成分の各々から等距離である中間点を含み、前記制御システムは、該ソースの各スペクトル成分を該ソースのスペクトル成分のうちの他方のスペクトル成分に対して移動させて、該距離を変化させ、該中間点を固定状態に保持する、項目88に記載の装置。
(項目90) 前記検出器と、前記オブジェクトの表面上のポイントとの間に配置されたイメージングシステムをさらに備え、該イメージングシステムは、該検出器上のポイントをイメージングする、項目85に記載の装置。
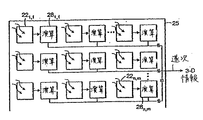
(項目91) 前記検出器は複数の光検出器を備える、項目85に記載の装置。
(項目92) 前記プロセッサは、複数の処理ユニットを有するマルチプロセッサシステムを備え、前記複数の光検出器はそれぞれ、該複数の処理ユニットの各々と電気的に通信する、項目91に記載の装置。
(項目93) 前記2つの放射ソースは、
a)あるスペクトル幅を有する放射のビームの初期ソースと、
b)該放射のビームの初期ソースと光学的に連絡し、第1の光学ビームおよび第2の光学ビームを生成するビーム分離器と、
c)該ビーム分離器と光学的に連絡するイメージングシステムであって、該2つの放射ソースがそれぞれ該第1の光学ビームおよび該第2の光学ビームに対応するように該2つの放射ソースを生成するイメージングシステムと、
を備える、項目85に記載の装置。
(項目94) 前記ビーム分離器は回折格子である、項目93に記載の装置。
(項目95) 1つのソースのスペクトル分布中の波長におけるポイントは、他方のソースのスペクトル分布中の波長における各ポイントと前記距離だけ隔離され、該距離は、該ポイントの波長に実質的に比例する、項目85に記載の装置。
(項目96) 前記制御システムは位相シフタをさらに備える、項目85に記載の装置。
(項目97) 前記位相シフタは、前記ビーム分離器の位置を前記放射のビームに対して変化させるトランスレータである、項目96に記載の装置。
(項目98) 前記制御システムは、可変な焦点距離を有するズームレンズを備え、該ズームレンズは、該可変な焦点距離の変化に応答して該隔離の距離を変化させる、項目85に記載の装置。
(項目99) 前記制御システムは、焦点距離が異なる複数のレンズを備え、該隔離の距離は、該複数のレンズのうちの1つの各焦点距離に対応する、項目85に記載の装置。
(項目100) 前記回折格子は空間光変調器である、項目94に記載の装置。
(項目101) 前記空間光変調器は、調節可能な格子周期を有し、該格子周期は、該空間光変調器に与えられる電気信号に応答する、項目100に記載の装置。
(項目102) 前記ビーム分離器は音響光学変調器である、項目93に記載の装置。
(項目103) 前記放射のビームの初期ソースと光学的に連絡する振幅変調器をさらに備える、項目93に記載の装置。
(項目104) オーダ−ブロックマスクをさらに備える、項目93に記載の装置。
(項目105) 前記オーダ−ブロックマスクは2重スリットのマスクである、項目104に記載の装置。
(項目106) 前記ビーム分離器と光学的に連絡する振幅変調器をさらに備え、該振幅変調器は、前記初期ソースの振幅を変調する、項目93に記載の装置。
(項目107) 表面を有するオブジェクト上において、該オブジェクトの表面上のポイントの三次元位置情報を判定する方法であって、
a)2つの放射ソースを提供する工程であって、該2つの放射ソースはそれぞれ、スペクトル分布を有し、該2つのソースのうちの他方のソースに対してコヒーレントである、工程と、
b)該表面上のポイントに検出器を設ける工程と、
c)該オブジェクトの表面上のポイントを該ソースの各々からの放射で照射する工程と、
d)該ソースの各々を相互に移動させる工程と、
e)該オブジェクトの表面上のポイントにおいて該放射を検出する工程と、
f)該ソースの移動と、該オブジェクトの表面上のポイントにおいて検出された放射とに応答して位置情報を計算する工程と、
を包含する、方法。
(項目108) 前記2つの放射ソースは、狭帯域であるスペクトル分布を有する、項目107に記載の方法。
(項目109) 前記ソースの1つからの放射のスペクトル分布中のスペクトル成分の位相を、該ソースのうちの他方のソースからの放射のスペクトル分布中の各スペクトル成分の位相を前記オブジェクトの表面上のポイントにおいて測定した値に対して変化させる工程をさらに包含する、項目107に記載の方法。
(項目110) 前記放射ソースは仮想放射ソースである、項目107に記載の方法。
(項目111) 前記ソースの各々を移動させる工程は、該ソースのうちの1つのスペクトル成分と該ソースのうちの他方のソースの各スペクトル成分との間の距離を変化させて、該ソースの各スペクトル成分間の距離を変化させる工程を包含する、項目107に記載の方法。
(項目112) 前記距離は、前記ソースのスペクトル成分の各々から等距離である中間点を含み、該ソースの各々を移動させる工程は、該ソースのうちの1つのスペクトル成分と、該ソースのうちの他方のソースの各スペクトル成分との間の距離を変化させて、該ソースの各スペクトル成分間の距離を変化させ、該中間点を固定状態に保持する工程を包含する、項目111に記載の方法。
(項目113) 表面を有するオブジェクト上において、該オブジェクトの表面上のポイントの三次元位置情報を判定する装置であって、
a)スペクトル分布を有し、互いにコヒーレントな2つの放射ソースと、
b)該ソースの各々を相互に移動させる制御システムと、
c)該オブジェクトの表面上のポイントを照射する放射を受信するように、該オブジェクトの表面上の該ポイントに配置された検出器と、
d)該検出器からの信号を受信するプロセッサであって、該ソースの移動と、該オブジェクトの表面上の該ポイントにおいて受信された放射とに応答して該オブジェクトの表面上の該ポイントの位置情報を計算する、プロセッサと、
を備える、装置。
(項目114) 前記2つの放射ソースは、狭帯域であるスペクトル分布を有する、項目113に記載の装置。
(項目115) 前記制御システムは、前記ソースの1つからの放射のスペクトル分布中のスペクトル成分の位相を、該ソースのうちの他方のソースからの放射のスペクトル分布中の各スペクトル成分の位相を前記オブジェクトの表面上のポイントにおいて測定した値に対して変化させる、項目113に記載の装置。
(項目116) 前記放射ソースは仮想放射ソースである、項目113に記載の装置。
(項目117) 前記制御システムは、前記放射ソースのうちの1つの各スペクトル成分を、該放射ソースのうちの他方のソースの各スペクトル成分に対して移動させて、該2つの放射ソースの各スペクトル成分間の距離を変化させる、項目113に記載の装置。
(項目118) 前記距離は、前記ソースのスペクトル領域の各々から等距離である中間点を含み、前記制御システムは、該ソースの各スペクトル成分を該ソースのスペクトル成分のうちの他方のスペクトル成分に対して移動させて、該距離を変化させ、該中間点を固定状態に保持する、項目117に記載の装置。
本発明は上掲の特許請求の範囲に特に示される。本発明の上述およびさらなる利点は、添付の図面に関する以下の説明を参照することによってよりよく理解され得る。
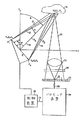
s=R2−R1+S0 (1)をまず考察することによって測定され得る。量S0は、ビームが点P1およびP2に到達する前に生じ得る、ビームにおける任意の光路長の差を考慮に入れるために含まれる。
Δν=c/s (2)
ここで、cは光の速度である。従って、強度の1振動を引き起こすために必要とされるレーザの周波数Δνの変化を測定することによって、光路差sが決定され得る。zの測定は、その後、後述されるように、xおよびyの各値に対してsの値を決定することに基づく。
N=B/Δν (3)
式(2)を用いて、式(3)からΔνを消去すると、Nに関するsの以下の数式が得られる。
s=(c/B)・N (4)
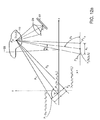
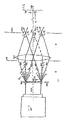
長さBの周波数走査により誘導された振動サイクル数Nは、周波数の走査中、測定点P0にわたって移動する干渉縞の数に対応することに留意されたい。干渉縞は、ソースP1およびP2から発せられる放射の干渉によって生成される。これらの振動は、結像レンズ24によって干渉縞が解消されてもされなくても生じる。
Δs=(c/B)・ΔN=s・(ΔN/N) (5)
のsにおける不確定度Δsに対応する。
φ=tan−1((I1−I3)/(2I2−I1−I3)) (6)
位相における不確定度Δφは、2πで除算することによってサイクルカウントにおける不確定度ΔNに変換される。

ここで、aは点ソースP1の平行移動の大きさを表し、ls、msおよびnsはx、yおよびz軸それぞれに関する平行移動の方向を表す方向余弦である。
これらソースP1およびP2からの放射が点P0へ伝播した後に測定された、の位相差は、以下の数式によって与えられる。
aの値が小さい場合、ρは以下のように近似される。
O=[xls+yms+a(ρ2−1)]ns (29)および
l=x/R0,m=y/R0およびn=x/R0 (34)
は、点P0の方向余弦である。Gに関する第2の式において、θは極角およびφは方位角であり、球面座標系における原点からP0への方向を表す。同様に、ソース点の平行移動の方向はθsおよびφsによって与えられる。
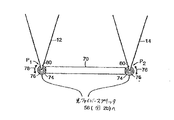
測定技術の例示的例として、x−y平面における200mm×200mmである物体を、R0=1mの距離から波長λ=0.7μmのレーザを用いて撮像することが所望されることを仮定されたい。ns=0および物体の中心がθ=30°およびφ=φsにおいて配置される場合、式(39)によって、ジオメトリックファクタGは、視野にわたって2.1と2.6との間で変化する。式(32)によって、a=5mmの平行移動は、カウントの20分の1、すなわちΔN=0.05の振動の数における不確定度に対して、Δz=16μmの範囲不確定度を(画像の中心において)生成する。走査全体に対する振動カウントの総数は、式(16)によりN=3600である。画像の中心における変調の不均一度を推定するために、式(38)においてψ=60°を設定し、χ=0.0075を取得する。その結果、不均一度は、走査にわたって1%よりも少ない。この不均一度は、走査中に、走査速度を少しだけ変化させ、測定中の周波数の任意の変化を補償することによってさらに低減され得る。
側方座標は、以下によって得られる。
z座標は、以下によって得られる。
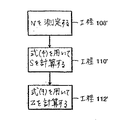
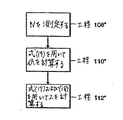
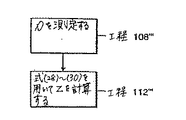
図16を用いて三次元イメージを生成するプロシージャは、図15に概要を示すものと同じであるが、ただし、工程232において、Nをzに変換する際に式(71)または式(72)を用いている点においてのみ異なる。図16に示すアプローチは三角測量に依存していないため、ソースP1およびP2と受信器22および24との間のシャドーイング効果を無くすことができるという利点が得られる。このアプローチは特に短距離の用途に有用であり、そのような用途としては、経路長さの間隔が短い三次元顕微鏡法がある。
Δφ=2π(ΔνS0)/c
あるいは、経路−長さオフセットを故意にゼロ以外の値に設定して、2πの増分の位相Δφにおいて縞パターンを「ストロボ」して、当該縞の位相をフリーズすることも可能である。こうすると、ストロボのタイミングを変更することにより、異なる位相シフトを達成することができる。
d=(RD)/(2f)
縞パターン280のdを連続的に変化させるかまたは連続する任意の一連のd値を生成するためには、(76)中のパラメータのうち1つ以上を連続的に変化させることが可能な能力が必要となる。一実施形態において、レンズ266は、焦点距離fが変化するズームレンズであり得る。別の実施形態において、格子に力を与えて格子を伸張させることにより、格子254の周期Dを変化させることが可能である。さらに別の実施形態において、一例として液晶デバイス中の可変格子モード(VGM)効果を通じて、格子254の周期Dを電子的に変化させることが可能である。さらに別の実施形態において、格子ラインに対して直交する軸に沿って格子254の周期を変化させることが可能であり、これにより、格子254を282に対して垂直方向に側方にスライドさせると、格子254の周期Dを制御することができる。上述した縞合成を用いることにより、実際の周期dを(f、DまたはRの変動が小さい様態で)大きく変化させることが可能となる。例えば、縞合成式(64)および(67)を以下のように改変することが可能である。
Δφ=180°/nblock
したがって、例えば、nblock値が2である場合、±90°、±180°および±270°の位相シフトを生成することができ、nblock値が3である場合、±60°、±120°、±180°、±240°および±300°の位相シフトを生成することができる。3つの任意の位相シフトφ1、φ2およびφ3に関する一般化された形式の式(6)は、以下のように表すことが可能である。
Claims (10)
- 縞を投射する装置であって、
該装置は、
スペクトル分布を有する放射ビームのソースと、
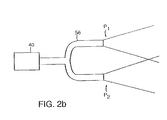
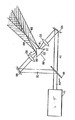
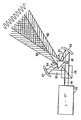
該放射ビームのソースと光学的に連絡し、該放射ビームから一対の均等なオーダのビームを生成するように構成されている回折性格子であって、該回折性格子は、可変格子周期を有し、該回折性格子は、該放射ビームの軸に対して実質的に直交する平行移動を行うように構成されている、回折性格子と、
該一対の均等なオーダのビームを受容する、該回折性格子と光学的に連絡するレンズであって、該レンズは、複数のスペクトル領域の空間分布を各々有する2つのイメージを形成するように構成されている、レンズと
を備えている、装置。 - 前記回折性格子は、前記一対の均等なオーダのビームに対して最大効率を有する、請求項1に記載の装置。
- 前記回折性格子の平行移動を可能にするように、該回折性格子に結合されたトランスレータをさらに備え、該トランスレータは、前記2つのイメージのうちの1つのイメージの前記複数のスペクトル領域のうちの1つのスペクトル領域の位相を、もう1つのイメージの該複数のスペクトル領域のうちのそれぞれ1つのスペクトル領域の位相に対してシフトさせる、請求項1に記載の装置。
- 前記レンズと光学的に連絡するオーダをブロックするマスクをさらに備え、該オーダをブロックするマスクは、前記2つのイメージにおいて放射を通過させ、少なくとも1つの残りの回折されたオーダのビームをブロックする、請求項1に記載の装置。
- 前記回折性格子は、液晶空間光変調器を含む、請求項1に記載の装置。
- 前記回折性格子は、電気的に切り替え可能な回折性光学素子を含む、請求項1に記載の装置。
- 前記回折性格子は、音響光学変調器を含む、請求項1に記載の装置。
- 前記2つのイメージのうちの1つのイメージの前記複数のスペクトル領域の各々は、該スペクトル領域の波長に比例する距離だけ、該2つのイメージのうちのもう1つのイメージのそれぞれのスペクトル領域から分離されている、請求項1に記載の装置。
- 前記放射ビームのソースは、広帯域のソースである、請求項1に記載の装置。
- 前記放射ビームのソースは、狭帯域のソースである、請求項1に記載の装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/480,043 | 2000-01-10 | ||
| US09/480,043 US6690474B1 (en) | 1996-02-12 | 2000-01-10 | Apparatus and methods for surface contour measurement |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001552052A Division JP2003519786A (ja) | 2000-01-10 | 2001-01-03 | 表面輪郭測定のための装置および方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011053224A JP2011053224A (ja) | 2011-03-17 |
| JP5241806B2 true JP5241806B2 (ja) | 2013-07-17 |
Family
ID=23906443
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001552052A Pending JP2003519786A (ja) | 2000-01-10 | 2001-01-03 | 表面輪郭測定のための装置および方法 |
| JP2010267905A Expired - Fee Related JP5241806B2 (ja) | 2000-01-10 | 2010-11-30 | 表面輪郭測定のための装置および方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001552052A Pending JP2003519786A (ja) | 2000-01-10 | 2001-01-03 | 表面輪郭測定のための装置および方法 |
Country Status (7)
| Country | Link |
|---|---|
| EP (1) | EP1247070B1 (ja) |
| JP (2) | JP2003519786A (ja) |
| AT (1) | ATE376165T1 (ja) |
| AU (1) | AU2001227574A1 (ja) |
| CA (1) | CA2397095C (ja) |
| DE (1) | DE60130968T2 (ja) |
| WO (1) | WO2001051886A1 (ja) |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7496004B2 (en) | 2003-05-02 | 2009-02-24 | Sony Corporation | Data reproducing apparatus, data reproducing method, data recording and reproducing apparatus, and data recording and reproducing method |
| EP1548400A1 (de) * | 2003-12-23 | 2005-06-29 | Vogel und Ploetscher GmbH | Messgerät zum Inspizieren von Schienen |
| JP4688625B2 (ja) * | 2005-10-18 | 2011-05-25 | 株式会社山武 | 3次元計測装置、3次元計測方法、及び3次元計測プログラム |
| DE102007002880B4 (de) * | 2007-01-15 | 2011-08-25 | DMG Microset GmbH, 33689 | Verfahren und Vorrichtung zum optischen Ausmessen eines Objekts, insbesondere eines Werkstücks oder Werkzeugs |
| EP1975680A1 (en) * | 2007-03-31 | 2008-10-01 | Sony Deutschland Gmbh | Illumination device and method for illuminating uniformly an image generating micro display |
| KR100870930B1 (ko) | 2007-05-08 | 2008-11-28 | 주식회사 고영테크놀러지 | 다방향 영사식 모아레 간섭계 및 이를 이용한 검사방법 |
| WO2010006081A1 (en) | 2008-07-08 | 2010-01-14 | Chiaro Technologies, Inc. | Multiple channel locating |
| EP2166305B1 (de) * | 2008-09-23 | 2012-05-16 | Sick Ag | Beleuchtungseinheit und Verfahren zur Projektion eines Beleuchtungsmusters |
| AU2011265572A1 (en) * | 2011-12-23 | 2013-07-11 | Canon Kabushiki Kaisha | Structured light system for robust geometry acquisition |
| DE102013201469B4 (de) | 2013-01-30 | 2023-01-12 | Rohde & Schwarz GmbH & Co. Kommanditgesellschaft | Verfahren und Vorrichtung zur Oberflächenbestimmung |
| LU92173B1 (en) * | 2013-03-20 | 2014-09-22 | Iee Sarl | Distance determination method |
| FI20135961A (fi) * | 2013-09-25 | 2015-03-26 | Aalto Korkeakoulusäätiö | Mallinnusjärjestely ja menetelmät ja järjestelmä kolmiulotteisen pinnan topografian mallintamiseksi |
| US9562760B2 (en) | 2014-03-10 | 2017-02-07 | Cognex Corporation | Spatially self-similar patterned illumination for depth imaging |
| US10571668B2 (en) | 2015-05-09 | 2020-02-25 | Cognex Corporation | Catadioptric projector systems, devices, and methods |
| JPWO2017183181A1 (ja) * | 2016-04-22 | 2019-02-28 | オリンパス株式会社 | 三次元形状測定装置 |
| RU172076U9 (ru) * | 2016-06-14 | 2017-08-22 | Александр Евгеньевич Соколов | Инфракрасное лазерное сканирующее устройство |
| US11300402B2 (en) * | 2017-05-31 | 2022-04-12 | Hewlett-Packard Development Company, L.P. | Deriving topology information of a scene |
| CN109635619B (zh) | 2017-08-19 | 2021-08-31 | 康耐视公司 | 用于三维重建的结构化光图案的编码距离拓扑 |
| EP3444782B1 (en) | 2017-08-19 | 2022-03-30 | Cognex Corporation | Coding distance topologies for structured light patterns for 3d reconstruction |
| FR3081592B1 (fr) * | 2018-05-25 | 2021-05-14 | Vit | Systeme de determination d'images tridimensionnelles |
| US11143503B2 (en) | 2018-08-07 | 2021-10-12 | Kimball Electronics Indiana, Inc. | Interferometric waviness detection systems |
| EP3864370A1 (en) * | 2018-10-12 | 2021-08-18 | Electric Power Research Institute, Inc. | Method for measuring surface characteristics in optically distorting media |
| CN110779461B (zh) * | 2019-10-16 | 2021-09-21 | 中国航空工业集团公司洛阳电光设备研究所 | 一种折反汇聚光路中平面反射镜面型的测试设备及方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2641945B2 (ja) * | 1989-08-31 | 1997-08-20 | 日本電気株式会社 | 距離画像取得方法及び装置 |
| JPH06241727A (ja) * | 1993-02-19 | 1994-09-02 | Nikon Corp | 位置検出装置 |
| US5870191A (en) * | 1996-02-12 | 1999-02-09 | Massachusetts Institute Of Technology | Apparatus and methods for surface contour measurement |
| US6031612A (en) * | 1996-02-12 | 2000-02-29 | Massachusetts Institute Of Technology | Apparatus and methods for contour measurement using movable sources |
-
2001
- 2001-01-03 CA CA2397095A patent/CA2397095C/en not_active Expired - Lifetime
- 2001-01-03 AU AU2001227574A patent/AU2001227574A1/en not_active Abandoned
- 2001-01-03 JP JP2001552052A patent/JP2003519786A/ja active Pending
- 2001-01-03 DE DE60130968T patent/DE60130968T2/de not_active Expired - Lifetime
- 2001-01-03 WO PCT/US2001/000161 patent/WO2001051886A1/en active IP Right Grant
- 2001-01-03 AT AT01901698T patent/ATE376165T1/de not_active IP Right Cessation
- 2001-01-03 EP EP01901698A patent/EP1247070B1/en not_active Expired - Lifetime
-
2010
- 2010-11-30 JP JP2010267905A patent/JP5241806B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CA2397095C (en) | 2010-04-27 |
| JP2003519786A (ja) | 2003-06-24 |
| EP1247070A1 (en) | 2002-10-09 |
| WO2001051886A9 (en) | 2002-10-31 |
| WO2001051886A1 (en) | 2001-07-19 |
| DE60130968D1 (de) | 2007-11-29 |
| CA2397095A1 (en) | 2001-07-19 |
| EP1247070B1 (en) | 2007-10-17 |
| AU2001227574A1 (en) | 2001-07-24 |
| ATE376165T1 (de) | 2007-11-15 |
| DE60130968T2 (de) | 2008-07-10 |
| JP2011053224A (ja) | 2011-03-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5241806B2 (ja) | 表面輪郭測定のための装置および方法 | |
| US6690474B1 (en) | Apparatus and methods for surface contour measurement | |
| US6031612A (en) | Apparatus and methods for contour measurement using movable sources | |
| US7777895B2 (en) | Linear-carrier phase-mask interferometer | |
| US7230717B2 (en) | Pixelated phase-mask interferometer | |
| KR101590241B1 (ko) | 광학특성 측정장치 및 광학특성 측정방법 | |
| US9810530B2 (en) | Autofocus system and method | |
| EP1724550B1 (en) | Interferometer and shape measuring method | |
| US6304330B1 (en) | Methods and apparatus for splitting, imaging, and measuring wavefronts in interferometry | |
| US9494411B2 (en) | Three-dimensional shape measuring device, method for acquiring hologram image, and method for measuring three-dimensional shape | |
| EP1717546B1 (en) | Interferometer and method of calibrating the interferometer | |
| JP7082137B2 (ja) | スペクトル制御干渉法による曲率半径測定 | |
| US10444004B2 (en) | Phase shift interferometer | |
| US10386174B2 (en) | Three-dimensional interferometer, method for calibrating such an interferometer and method for reconstructing an image | |
| US7561279B2 (en) | Scanning simultaneous phase-shifting interferometer | |
| TW202020400A (zh) | 表面形狀量測裝置以及表面形狀量測方法 | |
| CN107923735B (zh) | 用于推导物体表面的形貌的方法和设备 | |
| KR101554205B1 (ko) | 파장주사 층밀리기 간섭계를 이용한 자유곡면의 삼차원 형상 측정 장치 | |
| JP3934131B2 (ja) | 同軸型空間光干渉断層画像計測装置 | |
| JP2003294418A (ja) | 微小周期構造評価装置及び微小周期構造評価方法 | |
| JPH05296879A (ja) | 光学性能測定方法及び装置 | |
| JP5454769B2 (ja) | 分光立体形状測定装置及び分光立体形状測定方法 | |
| EP0520395A1 (en) | Optical heterodyne interference apparatus | |
| JP2004116997A (ja) | 被検物面の測定方法及び測定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111012 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111110 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121026 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130116 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130401 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130402 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160412 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |