JP5203339B2 - Elevator rope monitoring device - Google Patents
Elevator rope monitoring device Download PDFInfo
- Publication number
- JP5203339B2 JP5203339B2 JP2009271119A JP2009271119A JP5203339B2 JP 5203339 B2 JP5203339 B2 JP 5203339B2 JP 2009271119 A JP2009271119 A JP 2009271119A JP 2009271119 A JP2009271119 A JP 2009271119A JP 5203339 B2 JP5203339 B2 JP 5203339B2
- Authority
- JP
- Japan
- Prior art keywords
- rope
- elevator
- vibration
- control panel
- contact
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012806 monitoring device Methods 0.000 title claims description 18
- 238000001514 detection method Methods 0.000 claims description 26
- 238000012544 monitoring process Methods 0.000 claims description 18
- 230000009194 climbing Effects 0.000 description 10
- 238000010586 diagram Methods 0.000 description 8
- 238000000034 method Methods 0.000 description 6
- 230000009466 transformation Effects 0.000 description 4
- 238000012790 confirmation Methods 0.000 description 3
- 230000002265 prevention Effects 0.000 description 3
- 238000012423 maintenance Methods 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000001447 compensatory effect Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 230000000873 masking effect Effects 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 230000007306 turnover Effects 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images








Landscapes
- Maintenance And Inspection Apparatuses For Elevators (AREA)
Description
この発明は、ロープの部分的変形を監視するエレベータのロープ監視装置に関するものである。 The present invention relates to an elevator rope monitoring device for monitoring partial deformation of a rope.
従来、エレベータ用ロープの部分的変形確認は、保守点検員が定期点検時に目視にて確認することで行っていた。しかし、最近では、常時監視することが求められている。また、地震が発生した場合は、エレベータ復旧前に保守点検員がロープ乗り上げの発生の有無を直接確認する必要があったが、ロープ乗り上げの発生の有無の確認を自動で正確に検出する方法が求められていた。これら両方を確認するために、ロープガイドが受ける振動をセンサで検出する方法が考えられている。 Conventionally, partial deformation confirmation of an elevator rope has been performed by a maintenance inspector visually confirming at a regular inspection. However, recently, there is a demand for constant monitoring. In the event of an earthquake, maintenance inspectors had to directly check for the occurrence of rope climbing before the elevator restoration, but there is a method for automatically and accurately detecting whether rope climbing has occurred. It was sought after. In order to confirm both of these, a method has been considered in which vibrations received by the rope guide are detected by a sensor.
従来技術として、エレベータ巻上機の綱車及びそらせ車の近傍部にロープ外れ止め装置を設け、地震が発生しロープが綱車の溝部より脱落して隣接するロープと綱車溝部間に乗り上げた場合は、外れ止め部が変形することで作動スイッチを作動させることで検出したり、作動スイッチに代えて非接触で検出可能な変位センサなどを用いたエレベータのロープ外れ止め装置が知られている(例えば、特許文献1参照)。 As a conventional technology, a rope detachment prevention device was installed in the vicinity of the sheave and the deflector of the elevator hoist, and an earthquake occurred and the rope fell off the groove of the sheave, and got on between the adjacent rope and the sheave groove. In such a case, an elevator rope slip-off prevention device using a displacement sensor or the like that can be detected by activating the operation switch by deforming the slip-off preventing portion or detecting non-contactingly in place of the operation switch is known. (For example, refer to Patent Document 1).
従来のエレベータのロープ外れ止め装置では、ロープ乗り上げ発生の確認はできるが、ロープの部分的変形の確認はできなかった。また、走行中のロープガイドの振動をセンサで検出する方法を用いて、ロープ乗り上げ発生の確認とロープの部分的変形の確認を同時に解決するためには、ロープの部分的変形による振動は小さく、高いS/Nが得られないため、ロープ乗り上げ発生とロープの部分的変形を区別して判別することができないという問題点があった。 In the conventional elevator rope detachment prevention device, it is possible to confirm the occurrence of rope climbing, but it is not possible to confirm partial deformation of the rope. In addition, using the method of detecting the vibration of the rope guide while traveling with the sensor, the vibration due to the partial deformation of the rope is small in order to solve the confirmation of the rope climbing occurrence and the confirmation of the partial deformation of the rope at the same time. Since a high S / N cannot be obtained, there is a problem that it is not possible to distinguish between the occurrence of rope climbing and the partial deformation of the rope.
この発明は、上述のような課題を解決するためになされたもので、接点出力しか持たない安価なセンサ基板により、ロープの部分的変形、地震によるロープ乗り上げの両方を効率的に(低い誤判定率で)検出することを可能にしたエレベータのロープ監視装置を提供するものである。 The present invention has been made to solve the above-described problems. An inexpensive sensor board having only a contact output effectively eliminates both partial deformation of the rope and climbing of the rope due to an earthquake (low misjudgment rate). The present invention provides an elevator rope monitoring device that can be detected.
この発明に係るエレベータのロープ監視装置においては、エレベータのロープが巻き掛けられる巻上機、そらせ車、かご上返し車に近接して設けられたロープガイドと、ロープガイド又はその近傍に設けられ、ロープの部分的変形により、走行中にロープガイドが受ける振動が閾値を越えたことを検出した時に接点出力を出力する加速度計、マイク、接触センサのいずれかからなる振動検出センサと、振動検出センサから入力される接点入力のうちノイズによる振動を除去し、走行中にロープガイドが受ける振動からロープの部分的変形を検出する制御盤とを備えたものである。 In the elevator rope monitoring device according to the present invention, the hoisting machine around which the elevator rope is wound, the breeze wheel, the rope guide provided in the vicinity of the car turnover vehicle, and the rope guide or provided in the vicinity thereof, A vibration detection sensor consisting of an accelerometer, a microphone, or a contact sensor that outputs a contact output when it is detected that the vibration received by the rope guide exceeds a threshold due to partial deformation of the rope, and a vibration detection sensor And a control panel that removes vibration due to noise from the contact input input from and detects partial deformation of the rope from vibration received by the rope guide during traveling.
また、制御盤は、振動検出センサから入力される接点入力を時刻情報及びかご位置情報と関連付けて記録するものである。 The control panel records the contact input input from the vibration detection sensor in association with the time information and the car position information.
また、制御盤は、振動検出センサから入力される接点入力のうち、ランダムに発生する振動をノイズによる振動と判断して除去し、同一位置で発生する振動をロープの部分的変形による振動と判断するものである。 In addition, the control panel determines that the vibration generated at random from the contact input input from the vibration detection sensor is eliminated as noise vibration, and determines that the vibration generated at the same position is vibration due to partial deformation of the rope. To do.
また、制御盤は、かご位置が予め定めた範囲内にある状態での接点入力頻度が閾値以上になった時にロープの部分的変形の発生と判断するものである。 The control panel determines that a partial deformation of the rope has occurred when the contact input frequency in a state where the car position is within a predetermined range becomes equal to or greater than a threshold value.
また、制御盤は、かご位置が予め定めた範囲内にある状態での接点入力頻度の増加率が閾値以上になった時にロープの部分的変形の発生と判断するものである。 Further, the control panel determines that the partial deformation of the rope has occurred when the increasing rate of the contact input frequency in a state where the car position is within a predetermined range becomes equal to or greater than a threshold value.
また、制御盤は、エレベータの始動時及び停止時に発生する振動に基づく接点入力をマスクするものである。 The control panel masks contact inputs based on vibrations generated when the elevator starts and stops.
また、振動検出センサはロープガイドの取付基部側又は取付近傍の取付カバーに設けたものである。 The vibration detection sensor is provided on the attachment base side of the rope guide or in the vicinity of the attachment.
また、制御盤は、地震発生によりエレベータが停止した時に、過去の接点入力時刻と地震発生時刻、又はエレベータ停止時刻とを比較してロープ乗り上げの有無を検出するものである。 In addition, when the elevator stops due to the occurrence of an earthquake, the control panel compares the past contact input time with the earthquake occurrence time or the elevator stop time to detect the presence or absence of a rope ride.
この発明によれば、接点出力しか持たない安価なセンサにより、ロープの部分的変形、地震によるロープ乗り上げの両方を効率的に(低い誤判定率で)検出することができるという効果がある。 According to the present invention, there is an effect that an inexpensive sensor having only a contact output can efficiently detect (with a low misjudgment rate) both the partial deformation of the rope and the climbing of the rope due to the earthquake.
図1はこの発明の実施例1におけるエレベータのロープ監視装置の全体構成を示すブロック構成図、図2はこの発明の実施例1におけるエレベータのロープ監視装置のセンサ側の概略構成を示す要部の断面図、図3はこの発明の実施例1におけるエレベータのロープ監視装置のセンサ側を巻上機に片持ちロープガイドで取り付けた状態を示す説明図、図4はこの発明の実施例1において、ロープの部分的変形としてストランド破断が生じ、これがロープガイドへ衝突する頻度の時系列変化を示す説明図、図5はこの発明の実施例1において、ロープの部分的変形としてストランド破断が生じ、走行中にこれがロープガイドへ衝突することによる振動状況及び振動発生頻度の算出状況を示す説明図、図6はこの発明の実施例1におけるエレベータのロープ監視装置による始動時及び停止時の振動をマスクすることを示す説明図、図7はこの発明の実施例1におけるエレベータのロープ監視装置のセンサ側及び制御盤側の基本動作を説明するフローチャート、図8はこの発明の実施例1におけるエレベータのロープ監視装置によるロープの部分的変形の検出動作を説明するためのフローチャート、図9この発明の実施例1におけるエレベータのロープ監視装置による地震発生時のロープ乗り上げを検出する動作を説明するためのフローチャートである。 FIG. 1 is a block diagram showing the overall configuration of an elevator rope monitoring device according to Embodiment 1 of the present invention, and FIG. 2 is a schematic diagram showing the schematic configuration of the sensor side of the elevator rope monitoring device according to Embodiment 1 of the present invention. Cross-sectional view, FIG. 3 is an explanatory view showing a state in which the sensor side of the elevator rope monitoring device in Embodiment 1 of the present invention is attached to the hoisting machine with a cantilever rope guide, and FIG. 4 is Embodiment 1 of the present invention. FIG. 5 is an explanatory diagram showing a time-series change in the frequency at which a strand break occurs as a partial deformation of the rope and collides with the rope guide. FIG. 5 is a diagram of a first embodiment of the present invention. FIG. 6 is an explanatory diagram showing a vibration situation and a calculation situation of the vibration occurrence frequency due to the collision with the rope guide, and FIG. 6 is an elevator according to the first embodiment of the present invention. FIG. 7 is a flowchart for explaining basic operations on the sensor side and the control panel side of the elevator rope monitoring device according to the first embodiment of the present invention. FIG. 8 is a flowchart for explaining the operation of detecting partial deformation of the rope by the elevator rope monitoring apparatus according to the first embodiment of the present invention. FIG. 9 is the time of occurrence of an earthquake by the elevator rope monitoring apparatus according to the first embodiment of the present invention. It is a flowchart for demonstrating the operation | movement which detects the rope riding on.
図1において、1はエレベータのロープ監視装置のセンサ側で、ロープガイド振動検出手段2、演算装置3、接点出力手段4から構成されている。5はロープ監視装置の制御盤側で、地震検出手段6、停止手段7、時刻記録手段8、かご位置記録手段9、演算装置10、記録装置11から構成されている。
この発明によるロープガイド振動検出手段2は、例えば、図2に示すような構成である。すなわち、巻上機綱車12に巻き掛けられたロープ13の外周に地震耐震対策で取り付けられているロープガイド14又はその近傍に、ロープの部分的変形による走行中のロープガイド14の振動を捕らえることが可能な加速度計やマイクや接触センサ等の振動検出センサ15を追加して取り付け、この振動検出センサ15によりロープの部分的変形を検出するものである。地震耐震対策で取り付けられているロープガイド14は、ロープ13が地震の振動で巻上機綱車12の溝から外れるのを防止するために、ロープ13に接近するように設けられているので、ロープの部分的変形による走行中のロープガイド14の振動を捕らえることができ、この振動検出センサ15によりロープの部分的変形を検出するものである。
In FIG. 1, reference numeral 1 denotes a sensor side of an elevator rope monitoring device, which includes a rope guide vibration detection means 2, a
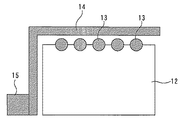
The rope guide vibration detecting means 2 according to the present invention is configured as shown in FIG. 2, for example. That is, the vibration of the
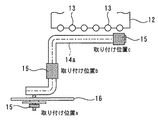
図3は巻上機綱車12にクランク状の片持ちロープガイド14aにより振動検出センサ15が取り付けられた状態を示す説明図である。振動検出センサ15は、クランク状の片持ちロープガイド14aの巻上機綱車12の取付カバー16への取付基部近傍(取り付け位置a)、クランク状の片持ちロープガイド14aの中間部(取り付け位置b)、及びクランク状の片持ちロープガイド14aの先端部(取り付け位置c)のいずれかに設置されるものである。振動検出センサ15の取り付け位置は、取付作業性の面から見れば、巻上機綱車12の取付カバー16への取付基部近傍(取り付け位置a)や、クランク状の片持ちロープガイド14aの中間部(取り付け位置b)が望ましく、先端部(取り付け位置c)はロープ13が直接当って破損したり、取付作業性が悪い場合がある。なお、ロープガイド振動検出手段2は、巻上機に限らず、そらせ車やコンペンシーブ、かご上返し車等に設けても良いものである。また、地震耐震対策で取り付けられているロープガイドは、クランク状の片持ちロープガイド14aに限らず、直線状の両持ちロープガイドであっても良い。
FIG. 3 is an explanatory view showing a state where the
図4はロープの部分的変形としてストランド破断が生じ、これがロープガイドへ衝突する頻度の時系列変化を示す説明図であり、破断発生初期はストランド衝突発生頻度は低いが(図4a参照)、破断発生後時間経過するとストランド衝突発生頻度が高くなる(図4b参照)。 FIG. 4 is an explanatory diagram showing a time-series change in the frequency with which strand breakage occurs as a partial deformation of the rope and this collides with the rope guide. Although the frequency of strand collision occurrence is low at the initial stage of breakage (see FIG. 4a), As time elapses after the occurrence, the frequency of occurrence of strand collision increases (see FIG. 4b).
また、図5はロープの部分的変形によるロープガイドの振動状況及び振動発生頻度の算出状況を示す説明図であり、エレベータの往復運転をN回行った際、ロープの部分的変形による振動が毎回ほぼ同一の位置で発生し、その振動レベルが閾値を越えていることが判る。一方、ノイズによる振動はランダムに毎回異なる位置で発生し、その振動レベルが閾値を越えていることが判る(図5a参照)。以上のことから、制御盤5側で各区間での過去N回中の振動発生頻度を算出する。ロープの部分的変形による振動の場合は一定以上の頻度で発生するので、ノイズによる振動と区別してロープの部分的変形を早期に検出することが可能となる。なお、ランダムに発生するノイズによる振動は振動レベルが閾値を越えていてもロープの部分的変形による振動ではないと判断し、除去する。なお、制御盤5のかご位置記録手段9は、エンコーダデータによりかご位置情報を管理しているので、例えばエンコーダ100パルス毎に区間を適宜区切ることができる(図5b参照)。
FIG. 5 is an explanatory view showing the vibration status of the rope guide due to the partial deformation of the rope and the calculation status of the vibration occurrence frequency. When the elevator reciprocates N times, the vibration due to the partial deformation of the rope occurs every time. It can be seen that the vibration occurs at almost the same position and the vibration level exceeds the threshold value. On the other hand, it can be seen that vibration due to noise occurs randomly at different positions each time, and the vibration level exceeds the threshold (see FIG. 5a). From the above, the vibration occurrence frequency in the past N times in each section is calculated on the
また、図6はエレベータの始動時及び停止時の振動をマスクすることを示す説明図であり、エレベータの始動時に発生する振動及び停止時(ブレーキ時)に発生する振動は、その振動レベルが例え閾値を越えていたとしても接点入力をマスクする。なお、制御盤5は、制御信号から制動(始動、ブレーキ)状態を判定し、この前後に接点入力があっても無視する構成としている。これにより安全なセンサ基板で構成可能となる。
FIG. 6 is an explanatory diagram showing that the vibration at the start and stop of the elevator is masked, and the vibration level at the start of the elevator and the vibration at the stop (during braking) are compared with the vibration level. Even if the threshold value is exceeded, the contact input is masked. The
次に、図7によりロープ監視装置のセンサ側及び制御盤側の基本動作について説明する。
センサ1側では、振動検出センサ15により振動データを取り込み(ステップS1)、ステップS2で演算装置3により閾値判定を行い、閾値を越えていれば接点出力手段4から接点出力を出力する(ステップS3)。ステップS2で閾値以下であれば無視する(ステップS4、図7a参照)。一方、制御盤5側では、センサ1側の接点出力手段4から演算装置10に接点入力が入力され(ステップS5)、ステップS6で制御盤5の時刻記録手段8及びかご位置記録手段9により時刻/かご位置記録と関連付けて記録装置11に記録される(図7b参照)。
Next, basic operations on the sensor side and the control panel side of the rope monitoring device will be described with reference to FIG.
On the sensor 1 side, vibration data is captured by the vibration detection sensor 15 (step S1), a threshold value is determined by the
次に、図8によりロープ監視装置のロープの部分的変形の検出動作について説明する。
制御盤側によるロープの部分的変形の判定動作は、先ずステップS11で判定動作を開始し、記録装置11から接点入力区間記録を読み出し(ステップS12)、ステップS13で各区間の接点入力頻度を算出する。ステップS14で接点入力頻度が閾値以上となる区間があるか否かを判定し、接点入力頻度が閾値以上となる区間があれば、ロープの部分的変形を検出し、発報する(ステップS15)。なお、ステップS14で接点入力頻度が閾値以上となる区間がなければ、一定時間待機後判定動作を開始する(ステップS16)。
Next, the operation of detecting the partial deformation of the rope of the rope monitoring device will be described with reference to FIG.
The operation of determining the partial deformation of the rope on the control panel side is first started at step S11, the contact input section record is read from the recording device 11 (step S12), and the contact input frequency of each section is calculated at step S13. To do. In step S14, it is determined whether or not there is a section where the contact input frequency is equal to or greater than the threshold value. If there is a section where the contact input frequency is equal to or greater than the threshold value, partial deformation of the rope is detected and reported (step S15). . If there is no section in which the contact input frequency is equal to or higher than the threshold value in step S14, the determination operation after waiting for a predetermined time is started (step S16).
次に、図9によりロープ監視装置による地震発生時のロープ乗り上げを検出する動作について説明する。
ロープ乗り上げの制御盤側判定動作は、先ずステップS21で地震発生等によりエレベータが停止し、記録装置11から例えば過去K回の接点入力時刻T=T1〜Tkを読み出し(ステップS22)、ステップS23で記録装置11から例えば地震発生検知時刻Tearthquakeを読み出す。次に、ステップS24で│Tearthquake−T│が閾値以下となるT=T1〜Tkがあるか否かを判定し、│Tearthquake−T│が閾値以下となるT=T1〜Tkがあれば、ロープ乗り上げありと判定する(ステップS25)。なお、ステップS24で│Tearthquake−T│が閾値以下となるT=T1〜Tkがなければ、ロープ乗り上げ無しと判定する(ステップS26)。なお、地震発生時刻の代わりにエレベータ停止時刻を用いても良い。
Next, an operation of detecting the rope climbing at the time of the earthquake occurrence by the rope monitoring device will be described with reference to FIG.
Control board side determination operation run-up rope, first elevator stops when the earthquake or the like in step S21, reads from the
図10はこの発明の実施例2におけるエレベータのロープ監視装置によるロープの部分的変形の検出動作を説明するためのフローチャートである。 FIG. 10 is a flowchart for explaining an operation for detecting partial deformation of the rope by the elevator rope monitoring apparatus according to the second embodiment of the present invention.
上記実施例1では、記録装置11から接点入力区間記録を読み出し(ステップS12)、ステップS13で各区間の接点入力頻度を算出する場合について説明したが、この実施例2においては、図10に示すように、制御盤側によるロープの部分的変形の判定動作は、先ずステップS31で判定動作を開始し、記録装置11から接点入力頻度記録を読み出し(ステップS32)、ステップS33で各区間の接点入力頻度の増加率を算出する。ステップS34で接点入力頻度の増加率が閾値以上となる区間があるか否かを判定し、接点入力頻度の増加率が閾値以上となる区間があれば、ロープの部分的変形を検出し、発報する(ステップS35)。なお、ステップS34で接点入力頻度の増加率が閾値以上となる区間がなければ、一定時間待機後判定動作を開始する(ステップS36)。なお、接点入力頻度の増加率算出方法の一例としては、連続する複数点から最小自乗法により傾きを算出する方法が考えられる。 In the first embodiment, the case where the contact input section record is read from the recording device 11 (step S12) and the contact input frequency of each section is calculated in step S13 has been described, but in the second embodiment, as shown in FIG. As described above, the determination operation of the partial deformation of the rope on the control panel side starts with the determination operation in step S31, reads the contact input frequency record from the recording device 11 (step S32), and inputs the contact input of each section in step S33. Calculate the rate of frequency increase. In step S34, it is determined whether or not there is a section in which the increase rate of the contact input frequency is equal to or greater than the threshold value. If there is a section in which the increase rate of the contact input frequency is equal to or greater than the threshold value, the partial deformation of the rope is detected. (Step S35). If there is no section where the increase rate of the contact input frequency is equal to or greater than the threshold value in step S34, the determination operation after waiting for a certain time is started (step S36). In addition, as an example of the method for calculating the increase rate of the contact input frequency, a method of calculating the slope from a plurality of consecutive points by the least square method is conceivable.
1 ロープ監視装置のセンサ側
2 ロープガイド振動検出手段
3 演算装置
4 接点出力手段
5 ロープ監視装置の制御盤側
6 地震検出手段
7 停止手段
8 時刻記録手段
9 かご位置記録手段
10 演算装置
11 記録装置
12 巻上機綱車
13 ロープ
14 ロープガイド
14a クランク状の片持ちロープガイド
15 振動検出センサ
16 取付カバー
DESCRIPTION OF SYMBOLS 1 Sensor side of
Claims (7)
前記ロープガイド又はその近傍に設けられ、前記ロープの部分的変形により、走行中に前記ロープガイドが受ける振動が閾値を越えたことを検出した時に接点出力を出力する加速度計、マイク、接触センサのいずれかからなる振動検出センサと、
前記振動検出センサから入力される接点入力のうちノイズによる振動を除去し、走行中にロープガイドが受ける振動からロープの部分的変形を検出する制御盤と、
を備えたことを特徴とするエレベータのロープ監視装置。 Hoist the elevator of the rope is wound, deflecting sheave, and a rope guide, which is provided in close proximity to the basket on the return sheave,
An accelerometer, a microphone, and a contact sensor that are provided at or near the rope guide and that output a contact output when it is detected that the vibration received by the rope guide during running has exceeded a threshold due to partial deformation of the rope. A vibration detection sensor comprising either
A control panel that removes vibration due to noise from the contact input input from the vibration detection sensor, and detects partial deformation of the rope from vibration received by the rope guide during traveling,
An elevator rope monitoring device characterized by comprising:
前記ロープガイド又はその近傍に設けられ、前記ロープの衝突により、走行中に前記ロープガイドが受ける振動が閾値を越えたことを検出した時に接点出力を出力する加速度計、マイク、接触センサのいずれかからなる振動検出センサと、
前記振動検出センサから入力される接点入力のうちノイズによる振動を除去し、走行中にロープガイドが受ける振動からロープの衝突を検出する制御盤と、
を備えたことを特徴とするエレベータのロープ監視装置において、
制御盤は、地震発生によりエレベータが停止した時に、過去の接点入力時刻と地震発生時刻、又はエレベータ停止時刻とを比較してロープ乗り上げの有無を検出することを特徴とするエレベータのロープ監視装置。 Hoist the elevator of the rope is wound, deflecting sheave, and a rope guide, which is provided in close proximity to the basket on the return sheave,
One of an accelerometer, a microphone, and a contact sensor that is provided at or near the rope guide and outputs a contact output when it is detected that the vibration received by the rope guide during running has exceeded a threshold due to a collision of the rope A vibration detection sensor comprising:
A control panel that removes vibration due to noise from the contact input input from the vibration detection sensor, and detects a collision of the rope from vibration received by the rope guide during traveling,
In the elevator rope monitoring device characterized by comprising:
An elevator rope monitoring device characterized in that when the elevator stops due to an earthquake, the control panel compares the past contact input time with the earthquake occurrence time or the elevator stop time to detect the presence or absence of a rope ride.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009271119A JP5203339B2 (en) | 2009-02-24 | 2009-11-30 | Elevator rope monitoring device |
| KR1020100014507A KR101653003B1 (en) | 2009-02-24 | 2010-02-18 | Elevator rope monitoring device |
| CN201010118223.XA CN101811636B (en) | 2009-02-24 | 2010-02-23 | Monitoring device for elevator rope |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009040523 | 2009-02-24 | ||
| JP2009040523 | 2009-02-24 | ||
| JP2009271119A JP5203339B2 (en) | 2009-02-24 | 2009-11-30 | Elevator rope monitoring device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010222143A JP2010222143A (en) | 2010-10-07 |
| JP2010222143A5 JP2010222143A5 (en) | 2011-07-14 |
| JP5203339B2 true JP5203339B2 (en) | 2013-06-05 |
Family
ID=43039754
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009271119A Active JP5203339B2 (en) | 2009-02-24 | 2009-11-30 | Elevator rope monitoring device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5203339B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017022709A1 (en) * | 2015-08-05 | 2017-02-09 | 三菱電機ビルテクノサービス株式会社 | Fracture detection device |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112016007046T5 (en) * | 2016-07-05 | 2019-03-21 | Mitsubishi Electric Corporation | ELEVATOR ROPE MONITORING DEVICE |
| JP7099626B2 (en) * | 2019-04-23 | 2022-07-12 | 三菱電機株式会社 | Breakage detector |
| KR20220051253A (en) * | 2019-09-30 | 2022-04-26 | 미쓰비시덴키 가부시키가이샤 | Vibration measuring device and management system for building equipment |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02145276U (en) * | 1989-05-15 | 1990-12-10 | ||
| JPH1081462A (en) * | 1996-09-06 | 1998-03-31 | Hitachi Building Syst Co Ltd | Abnormality diagnostic device for elevator |
| JP4896692B2 (en) * | 2006-12-08 | 2012-03-14 | 三菱電機ビルテクノサービス株式会社 | Main rope abnormality detection device and elevator device provided with the same |
| JP2008247607A (en) * | 2007-03-29 | 2008-10-16 | Fuji Hensokuki Co Ltd | Strand break detector |
| JP5401281B2 (en) * | 2009-02-20 | 2014-01-29 | 三菱電機株式会社 | Elevator rope swing detection device and automatic earthquake recovery operation control method using the same |
-
2009
- 2009-11-30 JP JP2009271119A patent/JP5203339B2/en active Active
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017022709A1 (en) * | 2015-08-05 | 2017-02-09 | 三菱電機ビルテクノサービス株式会社 | Fracture detection device |
| CN107922153A (en) * | 2015-08-05 | 2018-04-17 | 三菱电机大楼技术服务株式会社 | Break detector apparatus |
| CN107922153B (en) * | 2015-08-05 | 2019-07-19 | 三菱电机大楼技术服务株式会社 | Break detector apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010222143A (en) | 2010-10-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101653003B1 (en) | Elevator rope monitoring device | |
| WO2011158871A1 (en) | Method for monitoring damage to wire rope for elevator and device for monitoring damage to wire rope for elevator | |
| JP4849397B2 (en) | Elevator abnormality detection device | |
| JP4872379B2 (en) | Elevator abnormality detection device and elevator abnormality detection method | |
| JP5203339B2 (en) | Elevator rope monitoring device | |
| JP2014114111A (en) | Elevator with abnormality diagnosis function | |
| JP6049902B2 (en) | Elevator diagnostic equipment | |
| JP6601559B2 (en) | Break detection device | |
| JP5397075B2 (en) | Elevator abnormal sound detection device | |
| KR20100095375A (en) | Elevator rope swing detector, and thereby earthquake automatic restoration operation control method | |
| EP2396264A1 (en) | Elevator tension member monitoring device | |
| JP6239112B2 (en) | Elevator rope deterioration elongation diagnosis device, elevator rope deterioration elongation diagnosis method, and elevator rope deterioration elongation diagnosis projection member | |
| JP2007223750A5 (en) | ||
| JP4488216B2 (en) | Elevator control device | |
| EP3287405A1 (en) | Noise based elevator malfunction detection | |
| JP5401281B2 (en) | Elevator rope swing detection device and automatic earthquake recovery operation control method using the same | |
| JP4859387B2 (en) | Elevator earthquake operation device | |
| TWI703082B (en) | A rope monitoring instrument for elevators | |
| US20120130607A1 (en) | Method for early detection of damage in a motor vehicle transmission | |
| JP2020029314A (en) | Elevator diagnosis system and elevator diagnosis method | |
| JP4607083B2 (en) | Elevator rope roll detection device | |
| JP2010222143A5 (en) | ||
| JP4844410B2 (en) | Hook detection device for elevator ropes | |
| JP5939886B2 (en) | Earthquake motion convergence judgment system | |
| JP2019189416A (en) | Operation monitoring system of elevator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110525 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110525 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121204 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130129 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130213 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5203339 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160222 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |