JP5111795B2 - 監視装置 - Google Patents
監視装置 Download PDFInfo
- Publication number
- JP5111795B2 JP5111795B2 JP2006179928A JP2006179928A JP5111795B2 JP 5111795 B2 JP5111795 B2 JP 5111795B2 JP 2006179928 A JP2006179928 A JP 2006179928A JP 2006179928 A JP2006179928 A JP 2006179928A JP 5111795 B2 JP5111795 B2 JP 5111795B2
- Authority
- JP
- Japan
- Prior art keywords
- monitoring
- sensor
- information
- camera
- spread spectrum
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Closed-Circuit Television Systems (AREA)
- Radar Systems Or Details Thereof (AREA)
Description
また、カメラ映像内の動物体を自動追尾することにより、敷地境界のみならず、敷地内部についても監視を続行することができ、境界監視から敷地全体への監視へとセキュリティレベルを向上させることができるという効果がある。
図1は、この発明の実施の形態1による監視装置の構成を示す図である。実施の形態1による監視装置は、位置検知センサ1、センサ情報処理手段2、監視端末3及び旋回カメラ(監視用カメラ)4を備え、センサ情報処理手段2、監視端末3及び旋回カメラ4がネットワーク5により互いに接続されている。
参考文献1:特許3703689号
参考文献2:特開2004−138402号
参考文献3:K.Inomata, T.Hirai,“Microwave Back-Projection Radar for Wide-area Surveillance System,”Proc.34 European Microwave Conf., pp.1425-1428,(Oct. 2004)
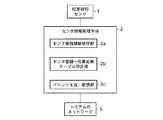
図2は、図1中のセンサ情報処理手段の構成を示すブロック図である。図2において、センサ情報処理手段2は、センサ情報閾値処理部2a、センサ情報−位置変換テーブル照合部2b及びイベント生成・配信部2cを備え、ネットワーク5を介して監視端末3とデータ通信が可能である。
図3は、図1中の監視端末の構成を概略的に示すブロック図である。図に示すように、監視端末3は、映像表示部(表示手段)3a、GUI3b、カメラ制御部3c及びイベント管理部3dを備える。
ここでは、位置検知センサ1として、参考文献1に開示される漏洩伝送路(LCX)を利用したセンサを用いる例を示す。
位置検知センサ1における送信LCXと受信LCXの間でのスペクトル拡散信号の検知データは、センサ情報処理手段2に逐一送信される。センサ情報処理手段2のセンサ情報閾値処理部2aでは、送信LCXと受信LCXの間に監視対象が存在しない状態における参照用及び検知用のスペクトル拡散信号の相関レベルが閾値として相関手段により算出されている。
図4は、この発明の実施の形態2による監視装置の構成を示すブロック図である。実施の形態2による監視装置は、上記実施の形態1で示した構成に加え、映像符号化手段6、映像蓄積配信手段7及び制御管理手段8を備えると共に、ネットワーク5を介して複数の監視端末3が接続される。実施の形態2における監視端末3は、上記実施の形態1と異なり、図3に示したカメラ制御部3c及びイベント管理部3dに対応する構成を有さず、これら構成による処理は制御管理手段8によって複数の監視端末3に関して一括して行われる。
ここでは、上記実施の形態1と同様に、位置検知センサ1として参考文献1に開示される漏洩伝送路(LCX)を利用したセンサを用いる例を示す。
位置検知センサ1における送信LCXと受信LCXの間でのスペクトル拡散信号の検知データは、センサ情報処理手段2に逐一送信される。センサ情報処理手段2のセンサ情報閾値処理部2aでは、送信LCXと受信LCXの間に監視対象が存在しない状態における参照用及び検知用のスペクトル拡散信号の相関レベルが閾値として相関手段により算出されている。
この実施の形態3は、上記実施の形態2の構成に対し、位置検知センサ1及びセンサ情報処理手段2を複数組備え、より広範囲の監視を可能としたものである。
この実施の形態4は、上記実施の形態3の構成に対し、1つ乃至複数の画像処理手段を備え、監視処理におけるより詳細な映像管理を可能としたものである。
この実施の形態5は、上記実施の形態4の構成に対し、1つ乃至複数の人感センサを備え、監視処理におけるより詳細な監視を可能としたものである。
この実施の形態6は、上記実施の形態5の構成に対し、1つ乃至複数のレーダセンサを備え、監視処理におけるより詳細な監視を可能としたものである。
Claims (3)
- ネットワークを介して駆動制御される複数の監視用カメラと、
監視対象の位置を検出する位置検知センサとして電波応用センサを用い、
前記位置検知センサからの検知情報に基づいて監視対象の位置を特定するセンサ情報処理手段と、
前記監視用カメラからの映像データを表示する表示手段を有し、前記監視用カメラのうち、前記センサ情報処理手段により特定された位置に対応する監視用カメラを選定し、前記ネットワークを介して前記選定した監視用カメラを駆動制御して前記監視対象の映像データを前記表示手段に表示する監視端末と、
前記監視用カメラが撮影した映像データを画像処理する画像処理手段とを備え、
前記画像処理手段は、前記電波応用センサによる検知範囲内外の双方において前記監視用カメラにより撮影された映像中の移動物体を追尾する画像処理を行い、移動物体を前記電波応用センサの位置分解能を超えるズームアップをしながら追尾するように前記監視用カメラを駆動制御することを特徴とする監視装置。 - 位置検知センサとして用いる電波応用センサは、
監視対象の検知用信号を放射する送信側の漏洩伝送路と、
前記送信側の漏洩伝送路に対向して設けられ、前記検知用信号を受信する受信側の漏洩伝送路と、
拡散符号に基づいて前記検知用信号としてスペクトル拡散信号を生成して前記送信側の漏洩伝送路に放射させるスペクトル拡散信号送信手段と、
前記スペクトル拡散信号送信手段の拡散符号と同一符号系列の拡散符号に基づいて、参照用のスペクトル拡散信号を生成する参照スペクトル拡散信号生成手段と、
前記受信側の漏洩伝送路が受信した前記検知用のスペクトル拡散信号の拡散符号に位相同期する拡散符号に基づいて、前記参照スペクトル拡散信号生成手段が生成した参照用のスペクトル拡散信号と前記受信側の漏洩伝送路が受信した前記検知用のスペクトル拡散信号との相関レベルを算出する相関手段と、
この相関手段が算出した相関レベルの変化から支障物を検知する検知手段とを備えたことを特徴とする請求項1記載の監視装置。 - コアの屈折率を周期的に変化させた回折格子を有する光ファイバを有し、前記光ファイバにかかる外力による歪みを検知する振動検知センサを、電波応用センサに並行して設置することを特徴とする請求項1または請求項2記載の監視装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006179928A JP5111795B2 (ja) | 2006-06-29 | 2006-06-29 | 監視装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006179928A JP5111795B2 (ja) | 2006-06-29 | 2006-06-29 | 監視装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008011212A JP2008011212A (ja) | 2008-01-17 |
| JP5111795B2 true JP5111795B2 (ja) | 2013-01-09 |
Family
ID=39069011
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006179928A Expired - Fee Related JP5111795B2 (ja) | 2006-06-29 | 2006-06-29 | 監視装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5111795B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101361801B1 (ko) * | 2008-12-01 | 2014-02-11 | 삼성테크윈 주식회사 | 감시 카메라 시스템 |
| JP2012008802A (ja) * | 2010-06-24 | 2012-01-12 | Toshiba Corp | 監視システム及び人物特定方法 |
| EP2987026B1 (en) | 2013-04-05 | 2020-03-25 | Andra Motion Technologies Inc. | System and method for controlling an equipment related to image capture |
| KR101548168B1 (ko) * | 2014-01-15 | 2015-08-31 | 삼영이엔씨 (주) | 양식장 감시 시스템 |
| CN104660990A (zh) * | 2015-01-30 | 2015-05-27 | 深圳市浩科电子有限公司 | 智能监控处理方法及系统 |
| KR102427110B1 (ko) * | 2020-07-10 | 2022-07-28 | 주식회사 에스원 | Cctv와의 연계를 통한 영상 리크 연계 방법 및 이를 이용한 리크 관리 시스템 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000105835A (ja) * | 1998-07-28 | 2000-04-11 | Hitachi Denshi Ltd | 物体認識方法及び物体追跡監視装置 |
| JP3703689B2 (ja) * | 2000-06-01 | 2005-10-05 | 三菱電機株式会社 | 支障物検知装置及び支障物検知システム |
| JP2004101239A (ja) * | 2002-09-05 | 2004-04-02 | Mitsubishi Electric Corp | 支障物検知装置 |
| JP3760918B2 (ja) * | 2003-01-21 | 2006-03-29 | 株式会社日立製作所 | セキュリティシステム |
| JP2005065238A (ja) * | 2003-07-25 | 2005-03-10 | Hitachi Ltd | 監視情報提供装置および監視情報提供方法 |
| JP2005045712A (ja) * | 2003-07-25 | 2005-02-17 | Mitsubishi Electric Corp | 監視システム |
| JP4400167B2 (ja) * | 2003-10-08 | 2010-01-20 | 三菱電機株式会社 | 監視システム |
| JP4301051B2 (ja) * | 2004-03-24 | 2009-07-22 | 三菱電機株式会社 | 港湾監視システム |
| JP4685390B2 (ja) * | 2004-09-07 | 2011-05-18 | 株式会社日立国際電気 | 監視カメラシステム |
| JP4472579B2 (ja) * | 2004-09-30 | 2010-06-02 | 三菱電機株式会社 | テンションセンサおよび侵入監視システム |
-
2006
- 2006-06-29 JP JP2006179928A patent/JP5111795B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008011212A (ja) | 2008-01-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100685979B1 (ko) | 센서와 카메라를 이용한 보안 감시 시스템 및 방법 | |
| EP2274654B1 (en) | Method for controlling an alarm management system | |
| JP5111795B2 (ja) | 監視装置 | |
| US20100245588A1 (en) | Tag tracking system | |
| KR100962529B1 (ko) | 객체 추적 방법 | |
| JP6268498B2 (ja) | 警備システム及び人物画像表示方法 | |
| KR101404153B1 (ko) | 지능형 cctv 통합관제시스템 | |
| KR102310192B1 (ko) | 객체 인식률 및 감시 정확성을 높인 융복합 카메라 및 이를 이용한 경계 감시시스템 | |
| CN106205042A (zh) | 一种地铁拥挤踩踏事故预警联动系统及预警联动方法 | |
| US20080036860A1 (en) | PTZ presets control analytiucs configuration | |
| WO2012155200A1 (en) | Surveillance system | |
| JP7464281B2 (ja) | 光ファイバセンシングシステム、監視装置、監視方法、及びプログラム | |
| JP2005086626A (ja) | 広域監視装置 | |
| CN101867789A (zh) | 使用可移动视频设备进行监控的方法和装置 | |
| JP2009015412A (ja) | 入場監視システム | |
| KR101290782B1 (ko) | 지능적 다중 객체 추적 알고리즘 기반의 다중 ptz 카메라 제어 시스템 및 방법 | |
| KR101014842B1 (ko) | Rfid 리더를 사용하는 보안용 영상 감시 시스템 및방법 | |
| RU2595532C1 (ru) | Радиолокационная система охраны территорий с малокадровой системой видеонаблюдения и оптимальной численностью сил охраны | |
| KR101324221B1 (ko) | 영상 촬영을 통한 물체 추적 시스템 및 그 방법 | |
| JP6045806B2 (ja) | 侵入監視装置 | |
| KR102355769B1 (ko) | 드론을 이용한 3차원 디지털트윈 구축방법 | |
| KR100929921B1 (ko) | 유비퀴터스 일체형 보안영상장치 및 시스템 | |
| KR101599614B1 (ko) | 영상을 활용한 통합형 차량감시 시스템 | |
| JP7176868B2 (ja) | 監視装置 | |
| KR101091909B1 (ko) | 감시 방법, 이를 채택한 감시 시스템, 및 상기 감시시스템을 구비한 개인용 휴대통신 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20080701 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081222 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110308 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110428 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120207 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120405 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121002 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121010 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151019 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5111795 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |