JP7464281B2 - 光ファイバセンシングシステム、監視装置、監視方法、及びプログラム - Google Patents
光ファイバセンシングシステム、監視装置、監視方法、及びプログラム Download PDFInfo
- Publication number
- JP7464281B2 JP7464281B2 JP2020570258A JP2020570258A JP7464281B2 JP 7464281 B2 JP7464281 B2 JP 7464281B2 JP 2020570258 A JP2020570258 A JP 2020570258A JP 2020570258 A JP2020570258 A JP 2020570258A JP 7464281 B2 JP7464281 B2 JP 7464281B2
- Authority
- JP
- Japan
- Prior art keywords
- monitoring
- monitoring target
- optical fiber
- camera
- scattered light
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012544 monitoring process Methods 0.000 title claims description 308
- 239000013307 optical fiber Substances 0.000 title claims description 124
- 238000012806 monitoring device Methods 0.000 title claims description 32
- 238000000034 method Methods 0.000 title claims description 18
- 239000000835 fiber Substances 0.000 claims description 6
- 230000010355 oscillation Effects 0.000 claims 2
- 238000001514 detection method Methods 0.000 description 70
- 230000006399 behavior Effects 0.000 description 45
- 230000003287 optical effect Effects 0.000 description 27
- 238000010586 diagram Methods 0.000 description 21
- 238000004891 communication Methods 0.000 description 10
- 230000015654 memory Effects 0.000 description 10
- 230000009471 action Effects 0.000 description 5
- 230000008901 benefit Effects 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 206010038743 Restlessness Diseases 0.000 description 3
- 238000004458 analytical method Methods 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000001815 facial effect Effects 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 239000002131 composite material Substances 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000005021 gait Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 241001465754 Metazoa Species 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000009194 climbing Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 238000010304 firing Methods 0.000 description 1
- 230000004313 glare Effects 0.000 description 1
- 238000010191 image analysis Methods 0.000 description 1
- 230000036039 immunity Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000000474 nursing effect Effects 0.000 description 1
- 238000010079 rubber tapping Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images




















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01H—MEASUREMENT OF MECHANICAL VIBRATIONS OR ULTRASONIC, SONIC OR INFRASONIC WAVES
- G01H9/00—Measuring mechanical vibrations or ultrasonic, sonic or infrasonic waves by using radiation-sensitive means, e.g. optical means
- G01H9/004—Measuring mechanical vibrations or ultrasonic, sonic or infrasonic waves by using radiation-sensitive means, e.g. optical means using fibre optic sensors
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B13/00—Burglar, theft or intruder alarms
- G08B13/02—Mechanical actuation
- G08B13/12—Mechanical actuation by the breaking or disturbance of stretched cords or wires
- G08B13/122—Mechanical actuation by the breaking or disturbance of stretched cords or wires for a perimeter fence
- G08B13/124—Mechanical actuation by the breaking or disturbance of stretched cords or wires for a perimeter fence with the breaking or disturbance being optically detected, e.g. optical fibers in the perimeter fence
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B13/00—Burglar, theft or intruder alarms
- G08B13/18—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength
- G08B13/181—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using active radiation detection systems
- G08B13/183—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using active radiation detection systems by interruption of a radiation beam or barrier
- G08B13/186—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using active radiation detection systems by interruption of a radiation beam or barrier using light guides, e.g. optical fibres
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B5/00—Visible signalling systems, e.g. personal calling systems, remote indication of seats occupied
- G08B5/22—Visible signalling systems, e.g. personal calling systems, remote indication of seats occupied using electric transmission; using electromagnetic transmission
- G08B5/36—Visible signalling systems, e.g. personal calling systems, remote indication of seats occupied using electric transmission; using electromagnetic transmission using visible light sources
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Alarm Systems (AREA)
- Closed-Circuit Television Systems (AREA)
- Burglar Alarm Systems (AREA)
- Emergency Alarm Devices (AREA)
Description
例えば、特許文献1には、異常発生地点が特定されると、複数のカメラのうち、その地点を撮影可能なカメラを選択し、選択されたカメラの撮影方向を決定し、決定された撮影方向を向くように、カメラを旋回制御する技術が開示されている。
光ファイバを含むケーブルと、
前記ケーブルに含まれる少なくとも1つの光ファイバから、監視対象の状態に応じたパターンを有する光信号を受信する受信部と、
前記光信号が有するパターンに基づいて、前記監視対象の位置を特定し、特定された位置の位置変動に基づいて、前記監視対象の軌跡を特定する監視部と、
を備える。
ケーブルに含まれる少なくとも1つの光ファイバから、監視対象の状態に応じたパターンを有する光信号を受信する受信部と、
前記光信号が有するパターンに基づいて、前記監視対象の位置を特定し、特定された位置の位置変動に基づいて、前記監視対象の軌跡を特定する監視部と、
を備える。
ケーブルに含まれる少なくとも1つの光ファイバから、監視対象の状態に応じたパターンを有する光信号を受信し、
前記光信号が有するパターンに基づいて、前記監視対象の位置を特定し、特定された位置の位置変動に基づいて、前記監視対象の軌跡を特定する。
コンピュータに、
ケーブルに含まれる少なくとも1つの光ファイバから、監視対象の状態に応じたパターンを有する光信号を受信する手順と、
前記光信号が有するパターンに基づいて、前記監視対象の位置を特定し、特定された位置の位置変動に基づいて、前記監視対象の軌跡を特定する手順と、
を実行させるためのプログラムが格納される。
<実施の形態1>
<実施の形態1の構成>
まず、図1を参照して、本実施の形態1に係る光ファイバセンシングシステムの構成について説明する。なお、本実施の形態1では、監視対象がフェンス10及びその周辺にいる人であるものとして説明するが、監視対象はこれに限定されるものではない。
(1)フェンス10を掴んで揺らす
(2)フェンス10を叩く
(3)フェンス10をよじ登る
(4)フェンス10に梯子を掛けて、梯子を登る
(5)フェンス10周辺をうろつく
(6)フェンス10周辺に穴を掘る
(7)フェンス10周辺で発砲する
(8)フェンス10周辺に物を置く
例えば、図4に示されるように、光ファイバセンシングエリアAR1内を監視対象が移動したとする。この場合、監視部32は、光ファイバ検知部31で受信された戻り光が有するパターンに基づいて、監視対象が移動した各位置を特定し、さらに、特定された位置の位置変動に基づいて、監視対象の軌跡を特定する。さらに、監視部32は、戻り光が有するパターンに基づいて、監視対象が、上記で特定された位置で取った行動も特定する。
図5に示されるように、コンピュータ60は、プロセッサ601、メモリ602、ストレージ603、入出力インタフェース(入出力I/F)604、及び通信インタフェース(通信I/F)605等を備える。プロセッサ601、メモリ602、ストレージ603、入出力インタフェース604、及び通信インタフェース605は、相互にデータを送受信するためのデータ伝送路で接続されている。
以下、図6を参照して、本実施の形態1に係る光ファイバセンシングシステムの動作フローについて説明する。
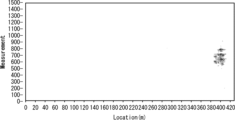
図7の例では、複数のポイント(P1~P3)で振動パターンが発生している。そのため、監視部32は、複数のポイント(P1~P3)で振動パターンを検知し、振動パターンが検知された位置の位置変動に基づいて、監視対象の軌跡を特定する。ただし、軌跡の特定方法はこれには限定されない。
上述したように本実施の形態1によれば、監視装置30は、光ファイバケーブル20に含まれる少なくとも1つの光ファイバから受信した戻り光が有する監視対象の状態に応じたパターンに基づいて、監視対象の位置を特定し、特定された位置の位置変動に基づいて、監視対象の軌跡を特定する。そのため、広範な監視エリアであっても、監視エリアに網羅的に光ファイバケーブル20を敷設することで、監視対象の連続的な追跡が可能である。また、光ファイバケーブル20は、安価であり、敷設も容易である。よって、監視対象の連続的な追跡が可能なシステムを、安価かつ容易に構築することができる。
・物陰等のカメラの死角ポイントにおける監視対象の軌跡及び行動も、途切れることなく追跡することが可能である。
・カメラにハレーションが発生し、カメラ画像に監視対象が映らない場合でも、監視対象の軌跡及び行動を追跡することが可能である。
・カメラで撮影されないような行動(例えば、顔を隠す、カメラの死角ポイントに移動する)をしている監視対象の軌跡及び行動も追跡することが可能である。
<実施の形態2の構成>
まず、図8を参照して、本実施の形態2に係る光ファイバセンシングシステムの構成について説明する。なお、本実施の形態2でも、上述した実施の形態1と同様に、監視対象がフェンス10及びその周辺にいる人であるものとして説明するが、監視対象はこれに限定されるものではない。
図9に示されるように、本例は、監視対象が、撮影可能エリアAR2の内部から、撮影可能エリアAR2の外部に出る例である。
・カメラ画像に写る人がブラックリストに載っている人物と一致すること(顔認証、全身認証、歩容認証等による一致)
・カメラ画像に写る人が所定の行動(ふらつき、うろつき、所定時間以上の滞在、物を振り回す、フェンス10に近づく等)を取っていること
・カメラ画像に写る人が特定の服装であったり、特定の所持品を所持していたりしたこと
図10に示されるように、本例は、監視対象が、撮影可能エリアAR2の外部から、撮影可能エリアAR2の内部に入る例である。
図11に示されるように、本例は、光ファイバセンシングエリアAR1の内部や、撮影可能エリアAR2の内部に、複数の人がいる場合の例である。
例えば、監視部32は、撮影可能エリアAR2の内部に複数の人がいる場合、複数の人のいずれかについて、以下の事象を検知した場合、その人を監視対象に決定することが考えられる。
・カメラ画像に写る人がブラックリストに載っている人物と一致すること(顔認証、全身認証、歩容認証等による一致)
・カメラ画像に写る人が所定の行動(ふらつき、うろつき、所定時間以上の滞在、物を振り回す、フェンス10に近づく等)を取っていること
・カメラ画像に写る人が特定の服装であったり、特定の所持品を所持していたりしたこと
この場合、以降、監視部32は、監視対象となった人のみを、パターン検知に基づく追跡及びカメラ画像に基づく追跡によって追跡する。また、監視部32は、監視対象となった人が何らかの行動を取ったときの振動データ等のパターンを、不審行動のパターン(例えば、歩く方向、歩くスピード、歩幅、足音等)として学習しておいても良い。
以下、図12を参照して、本実施の形態2に係る光ファイバセンシングシステムの動作フローについて説明する。なお、図12は、監視対象が撮影可能エリアAR2の内部にいるときは、カメラ画像に基づく追跡のみを行い、パターン検知に基づく追跡は行わない場合の例である。
上述したように本実施の形態2によれば、監視装置30は、光ファイバケーブル20に含まれる少なくとも1つの光ファイバから受信した戻り光が有する監視対象の状態に応じたパターン及びカメラ40で撮影されたカメラ画像に基づいて、監視対象の軌跡を特定する。このように、戻り光が有するパターン検知とカメラ画像とを連携させることで、監視対象の監視及び追跡をより高精度に行うことができる。
・光ファイバケーブル20が敷設されていないポイントにおける監視対象の軌跡及び行動も、途切れることなく追跡することが可能である。
・監視対象の画像解析(顔検知、顔認証等)を行うことが可能である。
・ファイバへの接触を伴わない行為(荷物の受け渡し、物を振り回す等)を検出することが可能である。
・カメラ画像に基づく追跡でブラックリストに載っている人を検知し、その人がフェンス10を叩いていることを、パターン検知に基づく追跡で検知する。
・カメラ画像に基づく追跡及びパターン検知に基づく追跡の両方で、監視対象が穴を掘っていることを検知する。この場合、監視対象が穴を掘っている可能性が高いと考えられる。
<実施の形態3の構成>
まず、図13を参照して、本実施の形態3に係る光ファイバセンシングシステムの構成について説明する。なお、本実施の形態3でも、上述した実施の形態1,2と同様に、監視対象がフェンス10及びその周辺にいる人であるものとして説明するが、監視対象はこれに限定されるものではない。
表示部50は、監視部32が追跡した監視対象の追跡結果を表示するもので、フェンス10及びその周辺を監視する監視ルーム等に設置される。なお、表示部50は、例えば、図6の表示装置6041として、図6のコンピュータ60(監視装置30を実現するコンピュータ)の入出力インタフェース604に接続される。
以下、図21を参照して、本実施の形態3に係る光ファイバセンシングシステムの動作フローについて説明する。なお、図21は、監視対象が撮影可能エリアAR2の内部にいるときは、カメラ画像に基づく追跡のみを行い、パターン検知に基づく追跡は行わない場合の例である。
その後、図12で説明したステップS23の処理(カメラ画像に基づく追跡)が行われた場合は、続いて、表示部50は、カメラ40で撮影されたカメラ画像を表示する(ステップS31)。
上述したように本実施の形態3によれば、表示部50は、カメラ40で撮影されたカメラ画像や、監視部32で特定された監視対象の軌跡の画像を表示する。そのため、監視ルーム等にいる監視員等は、表示部50の表示内容に基づいて、監視対象の軌跡を視覚的にかつ効率良く判断することができるようになる。
(付記1)
光ファイバを含むケーブルと、
前記ケーブルに含まれる少なくとも1つの光ファイバから、監視対象の状態に応じたパターンを有する光信号を受信する受信部と、
前記光信号が有するパターンに基づいて、前記監視対象の位置を特定し、特定された位置の位置変動に基づいて、前記監視対象の軌跡を特定する監視部と、
を備える光ファイバセンシングシステム。
(付記2)
前記監視部は、前記光信号が有するパターンに基づいて、前記監視対象の行動を特定する、
付記1に記載の光ファイバセンシングシステム。
(付記3)
前記監視対象を撮影可能なカメラをさらに備え、
前記監視部は、前記光信号が有するパターン及び前記カメラが撮影したカメラ画像に基づいて、前記監視対象の位置を特定し、特定された位置の位置変動に基づいて、前記監視対象の軌跡を特定する、
付記2に記載の光ファイバセンシングシステム。
(付記4)
前記監視部は、
前記監視対象が前記カメラの撮影可能エリアの内部にいるときは、前記カメラ画像に基づいて、前記監視対象の軌跡を特定し、
前記監視対象が前記撮影可能エリアの外部にいるときは、前記光信号が有するパターンに基づいて、前記監視対象の軌跡を特定する、
付記3に記載の光ファイバセンシングシステム。
(付記5)
前記監視部は、前記監視対象が前記カメラの撮影可能エリアの内部にいるときは、前記カメラ画像に基づいて、前記監視対象の軌跡を特定し、前記光信号が有するパターンに基づいて、前記監視対象の行動を特定する、
付記3に記載の光ファイバセンシングシステム。
(付記6)
前記監視対象は、人であり、
前記監視部は、複数の人がいる場合、前記光信号が有するパターンに基づいて、前記複数の人の各々について行動を特定し、前記複数の人の各々の行動に基づいて、前記複数の人の中から前記監視対象を決定する、
付記3から5のいずれか1項に記載の光ファイバセンシングシステム。
(付記7)
前記監視対象は、人であり、
前記監視部は、複数の人がいる場合、前記カメラ画像に基づいて、前記複数の人の各々について顔認証を行い、前記複数の人の各々の顔認証の結果に基づいて、前記複数の人の中から前記監視対象を決定する、
付記3から5のいずれか1項に記載の光ファイバセンシングシステム。
(付記8)
前記カメラが撮影したカメラ画像を表示すると共に、前記監視対象の特定された軌跡の画像を表示する表示部をさらに備える、
付記3から7のいずれか1項に記載の光ファイバセンシングシステム。
(付記9)
ケーブルに含まれる少なくとも1つの光ファイバから、監視対象の状態に応じたパターンを有する光信号を受信する受信部と、
前記光信号が有するパターンに基づいて、前記監視対象の位置を特定し、特定された位置の位置変動に基づいて、前記監視対象の軌跡を特定する監視部と、
を備える監視装置。
(付記10)
前記監視部は、前記光信号が有するパターンに基づいて、前記監視対象の行動を特定する、
付記9に記載の監視装置。
(付記11)
前記監視部は、前記光信号が有するパターン及び前記監視対象を撮影可能なカメラが撮影したカメラ画像に基づいて、前記監視対象の位置を特定し、特定された位置の位置変動に基づいて、前記監視対象の軌跡を特定する、
付記10に記載の監視装置。
(付記12)
前記監視部は、
前記監視対象が前記カメラの撮影可能エリアの内部にいるときは、前記カメラ画像に基づいて、前記監視対象の軌跡を特定し、
前記監視対象が前記撮影可能エリアの外部にいるときは、前記光信号が有するパターンに基づいて、前記監視対象の軌跡を特定する、
付記11に記載の監視装置。
(付記13)
前記監視部は、前記監視対象が前記カメラの撮影可能エリアの内部にいるときは、前記カメラ画像に基づいて、前記監視対象の軌跡を特定し、前記光信号が有するパターンに基づいて、前記監視対象の行動を特定する、
付記11に記載の監視装置。
(付記14)
前記監視対象は、人であり、
前記監視部は、複数の人がいる場合、前記光信号が有するパターンに基づいて、前記複数の人の各々について行動を特定し、前記複数の人の各々の行動に基づいて、前記複数の人の中から前記監視対象を決定する、
付記11から13のいずれか1項に記載の監視装置。
(付記15)
前記監視対象は、人であり、
前記監視部は、複数の人がいる場合、前記カメラ画像に基づいて、前記複数の人の各々について顔認証を行い、前記複数の人の各々の顔認証の結果に基づいて、前記複数の人の中から前記監視対象を決定する、
付記11から13のいずれか1項に記載の監視装置。
(付記16)
監視装置による監視方法であって、
ケーブルに含まれる少なくとも1つの光ファイバから、監視対象の状態に応じたパターンを有する光信号を受信し、
前記光信号が有するパターンに基づいて、前記監視対象の位置を特定し、特定された位置の位置変動に基づいて、前記監視対象の軌跡を特定する、
監視方法。
(付記17)
コンピュータに、
ケーブルに含まれる少なくとも1つの光ファイバから、監視対象の状態に応じたパターンを有する光信号を受信する手順と、
前記光信号が有するパターンに基づいて、前記監視対象の位置を特定し、特定された位置の位置変動に基づいて、前記監視対象の軌跡を特定する手順と、
を実行させるためのプログラムが格納された非一時的なコンピュータ可読媒体。
20 光ファイバケーブル
30 監視装置
31 光ファイバ検知部
32 監視部
40 カメラ
50 表示部
60 コンピュータ
601 プロセッサ
602 メモリ
603 ストレージ
604 入出力インタフェース
6041 表示装置
6042 入力装置
605 通信インタフェース
Claims (9)
- 光ファイバを含むケーブルと、
前記ケーブルに含まれる少なくとも1つの光ファイバから、監視対象の状態に応じた振動パターンを有する散乱光を受信する受信部と、
前記散乱光が有する振動パターンに基づいて、前記監視対象の位置を特定し、特定された位置の位置変動に基づいて、前記監視対象の軌跡を特定する監視部と、
を備え、
前記監視部は、前記散乱光が有する振動パターンに基づいて、前記監視対象の行動を特定する、
光ファイバセンシングシステム。 - ケーブルに含まれる少なくとも1つの光ファイバから、監視対象の状態に応じた振動パターンを有する散乱光を受信する受信部と、
前記散乱光が有する振動パターンに基づいて、前記監視対象の位置を特定し、特定された位置の位置変動に基づいて、前記監視対象の軌跡を特定する監視部と、
を備え、
前記監視部は、前記散乱光が有する振動パターンに基づいて、前記監視対象の行動を特定する、
監視装置。 - 前記監視部は、前記散乱光が有する振動パターン及び前記監視対象を撮影可能なカメラが撮影したカメラ画像に基づいて、前記監視対象の位置を特定し、特定された位置の位置変動に基づいて、前記監視対象の軌跡を特定する、
請求項2に記載の監視装置。 - 前記監視部は、
前記監視対象が前記カメラの撮影可能エリアの内部にいるときは、前記カメラ画像に基づいて、前記監視対象の軌跡を特定し、
前記監視対象が前記撮影可能エリアの外部にいるときは、前記散乱光が有する振動パターンに基づいて、前記監視対象の軌跡を特定する、
請求項3に記載の監視装置。 - 前記監視部は、前記監視対象が前記カメラの撮影可能エリアの内部にいるときは、前記カメラ画像に基づいて、前記監視対象の軌跡を特定し、前記散乱光が有する振動パターンに基づいて、前記監視対象の行動を特定する、
請求項3に記載の監視装置。 - 前記監視対象は、人であり、
前記監視部は、複数の人がいる場合、前記散乱光が有する振動パターンに基づいて、前記複数の人の各々について行動を特定し、前記複数の人の各々の行動に基づいて、前記複数の人の中から前記監視対象を決定する、
請求項3から5のいずれか1項に記載の監視装置。 - 前記監視対象は、人であり、
前記監視部は、複数の人がいる場合、前記カメラ画像に基づいて、前記複数の人の各々について顔認証を行い、前記複数の人の各々の顔認証の結果に基づいて、前記複数の人の中から前記監視対象を決定する、
請求項3から5のいずれか1項に記載の監視装置。 - 監視装置による監視方法であって、
ケーブルに含まれる少なくとも1つの光ファイバから、監視対象の状態に応じた振動パターンを有する散乱光を受信するステップと、
前記散乱光が有する振動パターンに基づいて、前記監視対象の位置を特定し、特定された位置の位置変動に基づいて、前記監視対象の軌跡を特定する特定ステップと、
を含み、
前記特定ステップでは、前記散乱光が有する振動パターンに基づいて、前記監視対象の行動を特定する、
監視方法。 - コンピュータに、
ケーブルに含まれる少なくとも1つの光ファイバから、監視対象の状態に応じた振動パターンを有する散乱光を受信する手順と、
前記散乱光が有する振動パターンに基づいて、前記監視対象の位置を特定し、特定された位置の位置変動に基づいて、前記監視対象の軌跡を特定する特定手順と、
を実行させるためのプログラムであり、
前記特定手順では、前記散乱光が有する振動パターンに基づいて、前記監視対象の行動を特定する、
プログラム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/004217 WO2020161823A1 (ja) | 2019-02-06 | 2019-02-06 | 光ファイバセンシングシステム、監視装置、監視方法、及びコンピュータ可読媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2020161823A1 JPWO2020161823A1 (ja) | 2021-11-25 |
| JP7464281B2 true JP7464281B2 (ja) | 2024-04-09 |
Family
ID=71947702
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020570258A Active JP7464281B2 (ja) | 2019-02-06 | 2019-02-06 | 光ファイバセンシングシステム、監視装置、監視方法、及びプログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20220120607A1 (ja) |
| JP (1) | JP7464281B2 (ja) |
| WO (1) | WO2020161823A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11816886B1 (en) * | 2018-06-28 | 2023-11-14 | Meta Platforms Technologies, Llc | Apparatus, system, and method for machine perception |
| JP7188604B2 (ja) * | 2019-08-26 | 2022-12-13 | 日本電気株式会社 | 光ファイバセンシングシステム、道路監視方法、及び光ファイバセンシング機器 |
| WO2022137350A1 (ja) * | 2020-12-22 | 2022-06-30 | 楽天グループ株式会社 | 監視システム、及び無人走行体 |
| CN113129530B (zh) * | 2021-04-19 | 2022-05-31 | 深圳晶华相控科技有限公司 | 基于物联网和机器视觉的智能安防电子围栏报警系统 |
| CN113256926B (zh) * | 2021-05-11 | 2022-10-25 | 仲永东 | 基于施工安全保护的主动式围栏系统 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006208061A (ja) | 2005-01-26 | 2006-08-10 | Comsec:Kk | 侵入検知センサー |
| WO2008111459A1 (ja) | 2007-03-06 | 2008-09-18 | Kabushiki Kaisha Toshiba | 不審行動検知システム及び方法 |
| JP2009128984A (ja) | 2007-11-20 | 2009-06-11 | Yamamoto Sangyo Kk | 敷物および監視装置 |
| CN107238412A (zh) | 2017-06-26 | 2017-10-10 | 鞍山睿科光电技术有限公司 | 一种同时监测振动、应力、温度的分布式光纤传感器 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07198471A (ja) * | 1993-12-29 | 1995-08-01 | Anritsu Corp | 振動源位置検出器及び振動源位置検出装置 |
| US6218945B1 (en) * | 1997-09-10 | 2001-04-17 | John E Taylor, Jr. | Augmented monitoring system |
| JP4401232B2 (ja) * | 2003-06-17 | 2010-01-20 | 株式会社クレヴァシステムズ | 侵入検知システム |
| JP4748981B2 (ja) * | 2004-12-20 | 2011-08-17 | 株式会社クレヴァシステムズ | 侵入検知センサー、および侵入検知システム |
| ES2369039T3 (es) * | 2005-05-06 | 2011-11-24 | Omnilink Systems, Inc. | Sistema y método de seguimiento del movimiento de individuos y bienes. |
| GB2445364B (en) * | 2006-12-29 | 2010-02-17 | Schlumberger Holdings | Fault-tolerant distributed fiber optic intrusion detection |
| US7605369B2 (en) * | 2007-01-08 | 2009-10-20 | Max-Viz, Inc. | Assessing runway visibility to airborne infrared vision devices |
| DK177172B1 (en) * | 2010-11-05 | 2012-04-16 | Nkt Cables Group As | An integrity monitoring system and a method of monitoring integrity of a stationary structure |
| US10217133B2 (en) * | 2013-07-19 | 2019-02-26 | Paypal, Inc. | Reverse showrooming and merchant-customer engagement system |
| US9904946B2 (en) * | 2013-07-18 | 2018-02-27 | Paypal, Inc. | Reverse showrooming and merchant-customer engagement system |
| US11734958B2 (en) * | 2015-06-19 | 2023-08-22 | eConnect, Inc. | Predicting behavior from surveillance data |
| US9836756B2 (en) * | 2015-06-24 | 2017-12-05 | Intel Corporation | Emotional engagement detector |
| US11625629B2 (en) * | 2016-03-04 | 2023-04-11 | Axon Vibe AG | Systems and methods for predicting user behavior based on location data |
-
2019
- 2019-02-06 JP JP2020570258A patent/JP7464281B2/ja active Active
- 2019-02-06 WO PCT/JP2019/004217 patent/WO2020161823A1/ja active Application Filing
- 2019-02-06 US US17/428,179 patent/US20220120607A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006208061A (ja) | 2005-01-26 | 2006-08-10 | Comsec:Kk | 侵入検知センサー |
| WO2008111459A1 (ja) | 2007-03-06 | 2008-09-18 | Kabushiki Kaisha Toshiba | 不審行動検知システム及び方法 |
| JP2009128984A (ja) | 2007-11-20 | 2009-06-11 | Yamamoto Sangyo Kk | 敷物および監視装置 |
| CN107238412A (zh) | 2017-06-26 | 2017-10-10 | 鞍山睿科光电技术有限公司 | 一种同时监测振动、应力、温度的分布式光纤传感器 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220120607A1 (en) | 2022-04-21 |
| WO2020161823A1 (ja) | 2020-08-13 |
| JPWO2020161823A1 (ja) | 2021-11-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7464281B2 (ja) | 光ファイバセンシングシステム、監視装置、監視方法、及びプログラム | |
| JP7505609B2 (ja) | 光ファイバセンシングシステム及び行動特定方法 | |
| JP7491414B2 (ja) | 制御装置、表示制御方法、及びプログラム | |
| KR101425505B1 (ko) | 객체인식기술을 이용한 지능형 경계 시스템의 감시 방법 | |
| EP2274654B1 (en) | Method for controlling an alarm management system | |
| US9767663B2 (en) | GPS directed intrusion system with data acquisition | |
| KR101933153B1 (ko) | 관심객체 이동방향에 따른 관제 영상 재배치 방법 및 장치 | |
| EP2618288A1 (en) | Monitoring system and method for video episode viewing and mining | |
| KR101832274B1 (ko) | 영상 촬영에 의한 지능형 방범 시스템 및 그 수행 방법 | |
| JP7276356B2 (ja) | 光ファイバセンシングシステム、状態検知装置、状態検知方法、及びプログラム | |
| CN114677640A (zh) | 基于机器视觉的智慧工地安全监测系统及方法 | |
| US20230401941A1 (en) | Monitoring system, monitoring apparatus, monitoring method, and computer readable medium | |
| JP5111795B2 (ja) | 監視装置 | |
| KR101611696B1 (ko) | 음향을 감지하여 위치 추적이 가능한 모니터링 시스템 및 방법과 이를 이용한 이벤트 모니터링 네트워크 | |
| JP7338687B2 (ja) | 光ファイバセンシングシステム、光ファイバセンシング機器、及び地中行動監視方法 | |
| JP4675217B2 (ja) | 追尾型監視システム | |
| WO2021059507A1 (ja) | 光ファイバセンシングシステム及び監視方法 | |
| Kent et al. | Integrated multisensor perimeter detection systems |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210721 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210721 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220712 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220907 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20221206 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230224 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20230224 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20230303 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20230307 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20230428 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240115 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240321 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7464281 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |