JP5111127B2 - 動画像符号化装置及びその制御方法、並びに、コンピュータプログラム - Google Patents
動画像符号化装置及びその制御方法、並びに、コンピュータプログラム Download PDFInfo
- Publication number
- JP5111127B2 JP5111127B2 JP2008011927A JP2008011927A JP5111127B2 JP 5111127 B2 JP5111127 B2 JP 5111127B2 JP 2008011927 A JP2008011927 A JP 2008011927A JP 2008011927 A JP2008011927 A JP 2008011927A JP 5111127 B2 JP5111127 B2 JP 5111127B2
- Authority
- JP
- Japan
- Prior art keywords
- block
- prediction mode
- prediction
- frame
- processing target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Compression Or Coding Systems Of Tv Signals (AREA)
Description
処理対象ブロックの予測モードを、
該処理対象ブロックに隣接する第1のブロックについて選択された予測モードと、
該処理対象ブロックに隣接する第2のブロックについて選択された予測モード、もしくは、前記処理対象ブロックが属する第1のフレーム内で前記第2のブロックが有する空間位置と同一の空間位置を前記第1のフレームと時間的に最も近い符号化済の第2のフレーム内で有する第3のブロックについて選択された予測モードと
に基づいて推定する推定手段であって、該処理対象ブロックに隣接する第1のブロック及び第2のブロックのうち、
双方がイントラ予測符号化済の場合は、該第1のブロックと該第2のブロックとについてそれぞれ選択された前記予測モードに基づき、前記処理対象ブロックの予測モードを推定し、
前記第1のブロックのみがイントラ予測符号化済である場合は、該第1のブロックについて選択された予測モードと、前記第3のブロックについて選択された予測モードとに基づき、前記処理対象ブロックの予測モードを推定する推定手段と、
前記複数の予測モードのそれぞれが前記処理対象ブロックのイントラ予測符号化の際に選択された場合に該選択された予測モードを指定する指定データを、前記推定手段により推定された予測モードに基づき生成し、該指定データの第1の予測符号量を算出する生成手段と、
前記複数の予測モードのそれぞれについて、前記処理対象ブロックをイントラ予測符号化した際の第2の予測符号量を、前記第1の予測符号量を用いて予測する予測手段と、
前記予測手段により予測された第2の予測符号量に基づいて、前記処理対象ブロックのイントラ予測符号化に用いる予測モードを決定する決定手段と
を備える。
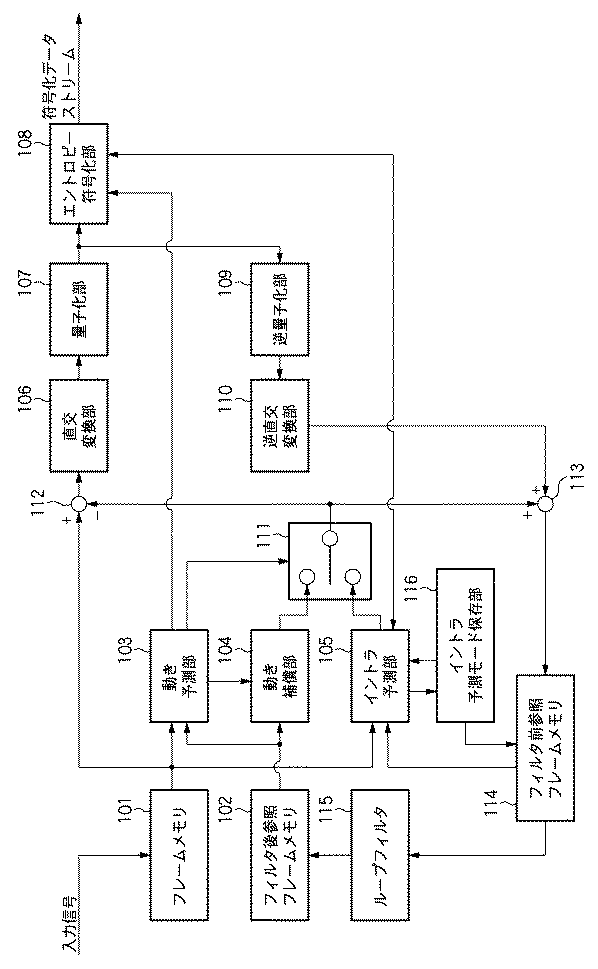
図1は、本実施形態に係る動画像符号化装置の機能構成の一例を示すブロック図である。図1に示すように、本発明に係る動画像符号化装置はフレームメモリ101、フィルタ後参照フレームメモリ102、動き予測部103、動き補償部104、イントラ予測部105、直交変換部106、量子化部107を備える。また、エントロピー符号化部108、逆量子化部109、逆直交変換部110、選択スイッチ111、減算器112、加算器113、フィルタ前参照フレームメモリ114、ループフィルタ115、イントラ予測モード保存部116をさらに備える。
予測モード0は、vertical(垂直)予測であり、P(x,-1)が「利用可能」である場合に適用される。この場合に、vertical(垂直)予測では、予測画像データPIの画素データPred(x,y)を数1のように生成する。
Pred(x,y)=P(x,-1) : x,y = 0..15
予測モード1:
予測モード1は、horizontal(水平)予測であり、P(-1,y)が「利用可能」である場合に適用される。この場合、horizontal(水平)予測では、予測画像データPIの画素データPred(x,y)を数2のように生成する。
Pred(x,y)=P(-1,y) : x,y = 0..15
予測モード2:
予測モード2は、DC予測であり、イントラ16x16予測では、予測画像データPIの画素データPred(x,y)を数3のように生成する。
予測モード3は、plane予測であり、P(x,-1)、P(-1,y)の全てが上記「利用可能」である場合に適用される。
この場合に、plane予測では、予測画像データPIの画素データPred(x,y)を数6のように生成する。
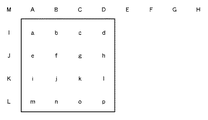
予測モード0は、vertical(垂直)予測であり、図4に示す画素データA,B,C,Dの全てが上記「利用可能」である場合に適用される。この場合、vertical予測は、符号化対象ブロックの画素データa〜pの予測値を、画素データA,B,C,Dを用いて数7のように生成する。
a,e,i,m: A
b,f,j,n: B
c,g,k,o: C
d,h,l,p: D
予測モード1:
予測モード1は、horizontal(水平)予測であり、図4に示す画素データI,J,K,Lの全てが上記「利用可能」である場合に適用される。この場合、horizontal予測は、符号化対象ブロック画素データa〜pの予測値を、画素データI,J,K,Lを用いて数8のように生成する。
a,b,c,d: I
e,f,g,h: J
i,j,k,l: K
m,n,o,p: L
予測モード2:
予測モード2は、DC予測である。図4に示す画素データA,B,C,D,I,J,K,Lの全てが上記「利用可能」である場合には、符号化対象ブロック画素データa〜pの予測値を、画素データA,B,C,D,I,J,K,Lを用いて数9のように生成する。
(A+B+C+D+I+J+K+L+4)>>3
また、図4に示す画素データA,B,C,Dの全てが上記「利用可能」でない場合には、符号化対象ブロック画素データa〜pの予測値を、画素データA,B,C,Dを用いて数10のように生成する。
(I+J+K+L+2)>>2
また、図4に示す画素データI,J,K,Lの全てが上記「利用可能」でない場合には、符号化対象ブロック画素データa〜pの予測値を、画素データI,J,K,Lを用いて数11のように生成する。
(A+B+C+D+2)>>2
また、図4に示す画素データA,B,C,D,I,J,K,Lの全てが上記「利用可能」でない場合には、符号化対象ブロック画素データa〜pの予測値「128」を用いる。
予測モード3は、Diagonal_Down_Left予測であり、図4に示す画素データA,B,C,D,I,J,K,L,Mの全てが上記「利用可能」である場合に適用される。この場合、Diagonal_Down_Left予測は、符号化対象ブロック画素データa〜pの予測値を、画素データA,B,C,D,I,J,K,L,Mを用いて数12のように生成する。
a: (A+2B+C+2)>>2
b,e:(B+2C+D+2)>>2
c,f,i:(C+2D+E+2)>>2
d,g,j,m:(D+2E+F+2)>>2
h,k,n:(E+2F+G+2)>>2
l,o:(F+2G+H+2)>>2
p:(G+3H+2)>>2
予測モード4:
予測モード4は、Diagonal_Down_Right予測であり、図4に示す画素データA,B,C,D,I,J,K,L,Mの全てが上記「利用可能」である場合に適用される。この場合に、符号化対象ブロック画素データa〜pの予測値を、画素データA,B,C,D,I,J,K,L,Mを用いて数13のように生成する。
m:(J+2K+L+2)>>2
i,n:(I+2J+K+2)>>2
e,j,o:(M+2I+J+2)>>2
a,f,k,p:(A+2M+I+2)>>2
b,g,l:(M+2A+B+2)>>2
c,h:(A+2B+C+2) >>2
d:(B+2C+D+2)>>2
予測モード5:
予測モード5は、Diagonal_Vertical_Right予測であり、図4に示す画素データA,B,C,D,I,J,K,L,Mの全てが上記「利用可能」である場合に適用される。この場合に、符号化対象ブロック画素データa〜pの予測値を、画素データA,B,C,D,I,J,K,L,Mを用いて数14のように生成する。
a,j:(M+A+1)>>1
b,k:(A+B+1)>>1
c,l:(B+C+1)>>1
d:(C+D+1)>>1
e,n:(I+2M+A+2)>>2
f,o:(M+2A+B+2)>>2
g,p:(A+2B+C+2)>>2
h:(B+2C+D+2)>>2
I:(M+2I+J+2)>>2
m:(I+2J+K+2)>>2
予測モード6:
予測モード6は、Horizontal_Down予測であり、図4に示す画素データA,B,C,D,I,J,K,L,Mの全てが上記「利用可能」である場合に適用される。この場合に、符号化対象ブロック画素データa〜pの予測値を、画素データA,B,C,D,I,J,K,L,Mを用いて数15のように生成する。
a,g:(M+I+1)>>1
b,h:(I+2M+A+2)>>2
c:(M+2A+B+2)>>2
d:(A+2B+C+2)>>2
e,k:(I+J+1)>>1
f,l:(M+2I+J+2)>>2
i,o:(J+K+1)>>1
j,p:(I+2J+K+2)>>2
m:(K+L+1)>>1
n:(J+2K+L+2)>>2
予測モード7:
予測モード7は、Vertical_Left予測であり、図4に示す画素データA,B,C,D,I,J,K,L,Mの全てが上記「利用可能」である場合に適用される。この場合に、符号化対象ブロック画素データa〜pの予測値を、画素データA,B,C,D,I,J,K,L,Mを用いて数16のように生成する。
a:(A+B+1)>>1
b,i:(B+C+1)>>1
c,j:(C+D+1)>>1
d,k:(D+E+1)>>1
l:(E+F+1)>>1
e:(A+2B+C+2)>>2
f,m:(B+2C+D+2)>>2
g,n:(C+2D+E+2)>>2
h,o:(D+2E+F+2)>>2
p:(E+2F+G+2)>>2
予測モード8:
予測モード8は、Horizontal_Up予測であり、図4に示す画素データA,B,C,D,I,J,K,L,Mの全てが上記「利用可能」である場合に適用される。この場合に、符号化対象ブロック画素データa〜pの予測値を、画素データA,B,C,D,I,J,K,L,Mを用いて数17のように生成する。
a:(I+J+1)>>1
b:(I+2J+K+2)>>2
c,e:(J+K+1)>>1
d,f:(J+2K+L+2)>>2
g,i:(K+L+1)>>1
h,j:(K+3L+2)>>2
k,l,m,n,o,p:L
なおイントラ16×16予測のモード1は水平方向に高い相関(重み付け)を持たせたモードであり、モード0は垂直方向に高い相関(重み付け)を持たせたモードである。またモード2、3は水平および垂直方向の重み付けを殆ど行っていないモードである。
垂直方向に隣接し、当該選択された第1のブロックデータによりも前に予測モード決定回路205にてイントラ予測モードが決定される第1のブロックデータ(図7「B」)と、
水平方向で隣接し、当該選択されたブロックデータよりも前に予測モード決定回路205にてイントラ予測モードが決定される第2のブロックデータ(図7の「A」)と
のイントラ予測モードを、イントラ予測部105の外部にあるイントラ予測モード保存部116から受信し、MPMデータを生成する。
MPM(C)=min(イントラ予測モード(A)、イントラ予測モード(B))
MPM選択回路201は、予測モード決定有無検出回路200から入力した判断結果が「処理対象のブロックデータが第2のグループに属する」ことを示す場合は、以下のようにしてMPMデータを生成する。
MPM(C)=min(イントラ予測モード(A’)、イントラ予測モード(B))
予測モード指定データ・符号量生成回路202は、MPM選択回路201から入力されたMPMデータを基に、処理対象ブロックのヘッダデータとそのヘッダデータを符号化した時の符号量を判断する指標データを生成する。この指標データは、SATD0として生成される。上記ヘッダデータには、最終的に決定されたイントラ予測モードを指定するための予測モード指定データPREV、REMが含まれる。ここで、「PREV」は、予測モードの伝送の有無を示すフラグであり、「REM」は、予測モードを示す。
一方、ステップS311では、予測モード指定データ・符号量生成回路202は、上述した処理を経て得られた全ての予測モード指定データPREVns(nsは、0から8)、REMnsns(nsは、0から8)の予測符号量(第1の予測符号量)を生成する。生成データは、4x4COST算出回路203に出力される。
COST=SATD+λ(QP)×SATD0
数20において、SATD(Sum of Absolute Transformed Difference)は、4x4の予測ブロックデータと、符号化対象の4x4のブロックデータとの画素データ間の差分にアダマール変換を施した値の累積値である。λ(QP)は、量子化パラメータQPに応じて決まるヘッダデータの予測符号量の係数である。SATD0は、予測モード指定データ・符号量生成回路202から入力された、予測モード指定データPREV,REMの予測符号量を示している。
次に図5のブロック図および図6を参照しながら、本発明にかかる動画像符号化装置の第2の実施形態について詳細に説明する。
以下、MAE値を例にした場合の、グローバルベクトルの選定方法の例を説明する。参照フレームを所定の方向(例えば、x方向)に1画素ずつずらしていき、画素の移動距離ごとにMAE値の総和の平均を取る。そして平均MAE値が最小となるときの移動量がグローバルベクトルの選定基準となる。この処理を例えば所定の方向と直交する他の方向(例えばy方向)についても実行し、この方向で平均MAE値が最小となる移動量が求まれば、2つの移動量とその移動方向からグローバルベクトルを決定することができる。
なお、本発明は、複数の機器(例えばホストコンピュータ、インタフェイス機器、リーダ、プリンタなど)から構成されるシステムに適用しても、一つの機器からなる装置(例えば、複写機、ファクシミリ装置など)に適用してもよい。
102フィルタ後参照フレームメモリ
103 動き予測部
104 動き補償部
105 イントラ予測部
106 直交変換部
107 量子化部
108 エントロピー符号化部
109 逆量子化部
110 逆直交変換部
111 選択スイッチ
112 減算器
113 加算器
114 フィルタ前参照フレームメモリ
115 ループフィルタ
116 イントラ予測モード保存部
Claims (18)
- フレームを構成する各々のブロックについて、複数の予測モードのいずれかの予測モードに従って、処理対象ブロックの隣接ブロックの画素データを用いてイントラ予測符号化を行う動画像符号化装置であって、
処理対象ブロックの予測モードを、
該処理対象ブロックに隣接する第1のブロックについて選択された予測モードと、
該処理対象ブロックに隣接する第2のブロックについて選択された予測モード、もしくは、前記処理対象ブロックが属する第1のフレーム内で前記第2のブロックが有する空間位置と同一の空間位置を前記第1のフレームと時間的に最も近い符号化済の第2のフレーム内で有する第3のブロックについて選択された予測モードと
に基づいて推定する推定手段であって、該処理対象ブロックに隣接する第1のブロック及び第2のブロックのうち、
双方がイントラ予測符号化済の場合は、該第1のブロックと該第2のブロックとについてそれぞれ選択された前記予測モードに基づき、前記処理対象ブロックの予測モードを推定し、
前記第1のブロックのみがイントラ予測符号化済である場合は、該第1のブロックについて選択された予測モードと、前記第3のブロックについて選択された予測モードとに基づき、前記処理対象ブロックの予測モードを推定する推定手段と、
前記複数の予測モードのそれぞれが前記処理対象ブロックのイントラ予測符号化の際に選択された場合に該選択された予測モードを指定する指定データを、前記推定手段により推定された予測モードに基づき生成し、該指定データの第1の予測符号量を算出する生成手段と、
前記複数の予測モードのそれぞれについて、前記処理対象ブロックをイントラ予測符号化した際の第2の予測符号量を、前記第1の予測符号量を用いて予測する予測手段と、
前記予測手段により予測された第2の予測符号量に基づいて、前記処理対象ブロックのイントラ予測符号化に用いる予測モードを決定する決定手段と
を備えることを特徴とする動画像符号化装置。 - 前記第1のフレームと前記第2のフレームとの空間的な位置の差を示すグローバルベクトルを演算するグローバルベクトル演算手段をさらに備え、
前記推定手段は、前記第3のブロックの予測モードに換えて、前記第2のブロックが前記第1のフレーム内で有する空間位置と同一の空間位置を前記第2のフレーム内で有するブロックから、前記グローバルベクトル分だけずれた第4のブロックの予測モードに基づき、前記処理対象ブロックの予測モードを推定することを特徴とする請求項1に記載の動画像符号化装置。 - 前記グローバルベクトル演算手段は、前記第1のフレームと前記第2のフレームとを複数のエリアに分割し、対応するエリア毎に前記グローバルベクトルを演算し、
前記推定手段は、前記処理対象ブロックが属するエリアについて求めた前記グローバルベクトルに基づいて、前記第4のブロックを特定することを特徴とする請求項2に記載の動画像符号化装置。 - 前記推定手段は、前記第4のブロックが前記第2のフレームに含まれなくなる場合には、前記第1のブロックについて選択された予測モードに基づき、前記処理対象ブロックの予測モードを推定することを特徴とする請求項2又は3に記載の動画像符号化装置。
- 前記生成手段は、前記複数の予測モードの各々について、
該予測モードと前記推定された予測モードとが一致する場合に、該一致を示す情報を含み、当該予測モードを示す値を含まない前記指定データを生成し、
該予測モードと前記推定された予測モードとが一致しない場合に、該予測モードを示す値、又は、該値から一定値を減算した値を含む前記指定データを生成する
ことを特徴とする請求項1から4のいずれか1項に記載の動画像符号化装置。 - 前記第1のブロックは、前記処理対象ブロックよりも符号化順が上位で、かつ、前記処理対象ブロックと垂直方向に隣接するブロックであり、
前記第2のブロックは、前記処理対象ブロックよりも符号化順が上位で、かつ、前記処理対象ブロックと水平方向に隣接するブロックである
ことを特徴とする請求項1から5のいずれか1項に記載の動画像符号化装置。 - フレームを構成する各々のブロックについて、複数の予測モードのいずれかの予測モードに従って、処理対象ブロックの隣接ブロックの画素データを用いてイントラ予測符号化を行う動画像符号化装置の制御方法であって、
推定手段が、処理対象ブロックの予測モードを、
該処理対象ブロックに隣接する第1のブロックについて選択された予測モードと、
該処理対象ブロックに隣接する第2のブロックについて選択された予測モード、もしくは、前記処理対象ブロックが属する第1のフレーム内で前記第2のブロックが有する空間位置と同一の空間位置を前記第1のフレームと時間的に最も近い符号化済の第2のフレーム内で有する第3のブロックについて選択された予測モードと
に基づいて推定する推定工程であって、該処理対象ブロックに隣接する第1のブロック及び第2のブロックのうち、
双方がイントラ予測符号化済の場合は、該第1のブロックと該第2のブロックとについてそれぞれ選択された前記予測モードに基づき、前記処理対象ブロックの予測モードを推定し、
前記第1のブロックのみがイントラ予測符号化済である場合は、該第1のブロックについて選択された予測モードと、前記第3のブロックについて選択された予測モードとに基づき、前記処理対象ブロックの予測モードを推定する推定工程と、
生成手段が、前記複数の予測モードのそれぞれが前記処理対象ブロックのイントラ予測符号化の際に選択された場合に該選択された予測モードを指定する指定データを、前記推定工程において推定された予測モードに基づき生成し、該指定データの第1の予測符号量を算出する生成手段と、
予測手段が、前記複数の予測モードのそれぞれについて、前記処理対象ブロックをイントラ予測符号化した際の第2の予測符号量を、前記第1の予測符号量を用いて予測する予測工程と、
決定手段が、前記予測工程において予測された第2の予測符号量に基づいて、前記処理対象ブロックのイントラ予測符号化に用いる予測モードを決定する決定工程と
を備えることを特徴とする動画像符号化装置の制御方法。 - フレームを構成する各々のブロックについて、複数の予測モードのいずれかの予測モードに従って、処理対象ブロックの隣接ブロックの画素データを用いてイントラ予測符号化を行う動画像符号化装置であって、
処理対象ブロックの予測モードを、前記処理対象ブロックを含む第1のフレーム内における前記処理対象ブロックに隣接するブロックの予測モードと、前記第1のフレームよりも前に符号化された第2のフレーム内における前記隣接するブロックに対応するブロックの予測モードとを用いて決定する決定手段と、
前記決定された予測モードに従って前記処理対象ブロックをイントラ予測符号化する符号化手段と
を有し、
前記決定手段は、
前記隣接するブロックの予測モードが取得できる場合は、前記第2のフレーム内における前記隣接するブロックに対応するブロックの予測モードを用いずに、前記隣接するブロックの予測モードを用いて、前記処理対象ブロックの予測モードを決定し、
前記隣接するブロックの予測モードが取得できない場合は、前記第2のフレーム内における前記予測モードが取得できないブロックに対応するブロックの予測モードを用いて、前記処理対象ブロックの予測モードを決定する
ことを特徴とする動画像符号化装置。 - 前記第2のフレーム内における前記予測モードが取得できないブロックに対応するブロックは、前記第1のフレーム内で前記予測モードが取得できないブロックが有する空間位置と同一の空間位置を前記第2のフレーム内で有するブロックであることを特徴とする請求項8記載の動画像符号化装置。
- 前記第1のフレームと前記第2のフレームとの空間的な位置の差を示すグローバルベクトルを演算する演算手段をさらに備え、
前記決定手段は、
前記隣接するブロックの予測モードが取得できない場合は、前記予測モードが取得できないブロックの前記第1のフレーム内での空間位置と前記グローバルベクトルとに基づいて選択した前記第2のフレーム内のブロックを、前記予測モードが取得できないブロックに対応するブロックとして、前記処理対象ブロックの予測モードを決定することを特徴とする請求項8に記載の動画像符号化装置。 - 前記決定手段は、前記処理対象ブロックの予測モードを、前記予測モードが取得できないブロックの前記第1のフレーム内での空間位置から前記グローバルベクトル分だけずれた位置の前記第2のフレーム内のブロックの予測モードを用いて決定することを特徴とする請求項10に記載の動画像符号化装置。
- 前記演算手段は、前記第1のフレームと前記第2のフレームとをずらしながら、各フレームの画素値の差分平均値を演算し、該差分平均値が最小になるずれ量に基づいて前記グローバルベクトルを演算することを特徴とする請求項10または11記載の動画像符号化装置。
- 前記演算手段は、前記第1のフレームと前記第2のフレームとをそれぞれ複数のエリアに分割し、対応するエリア毎に前記グローバルベクトルを演算し、
前記決定手段における前記第2のフレーム内のブロックの選択は、前記処理対象ブロックが属するエリアについて求めた前記グローバルベクトルに基づくことを特徴とする請求項10から12のいずれか1項に記載の動画像符号化装置。 - 前記決定手段は、
前記グローバルベクトルに基づくブロックの空間位置が前記第2のフレームの外となる場合には、
前記第1のフレーム内で前記予測モードが取得できないブロックが有する空間位置と同一の空間位置の前記第2のフレーム内で有するブロックを前記予測モードが取得できないブロックに対応するブロックとして、前記処理対象ブロックの予測モードを決定することを特徴とする請求項10から13のいずれか1項記載の動画像符号化装置。 - 前記処理対象ブロックに隣接するブロックは、前記処理対象ブロックに異なる方向でそれぞれ隣接する2つのブロックを含み、
前記隣接するブロックの予測モードが取得できない場合とは、前記隣接する2つのブロックのうち一方のブロックの予測モードのみが取得できない場合であって、当該場合に前記決定手段は、
前記第2のフレーム内における前記予測モードが取得できないブロックに対応するブロックの予測モードと、前記隣接する2つのブロックのうち予測モードが取得できた他方のブロックの予測モードとのうち、予測モードを表す番号が小さい予測モードを用いて、前記処理対象ブロックの予測モードを決定することを特徴とする請求項8から13のいずれか1項記載の動画像符号化装置。 - 前記符号化手段は、前記第1のフレームの複数のブロックを並列に符号化することを特徴とする請求項8から15のいずれか1項記載の動画像符号化装置。
- フレームを構成する各々のブロックについて、複数の予測モードのいずれかの予測モードに従って、処理対象ブロックの隣接ブロックの画素データを用いてイントラ予測符号化を行う動画像符号化装置の制御方法であって、
決定手段が、処理対象ブロックの予測モードを、前記処理対象ブロックを含む第1のフレーム内における前記処理対象ブロックに隣接するブロックの予測モードと、前記第1のフレームよりも前に符号化された第2のフレーム内における前記隣接するブロックに対応するブロックの予測モードとを用いて決定する決定工程と、
符号化手段が、前記決定された予測モードに従って前記処理対象ブロックをイントラ予測符号化する符号化工程とを有し、
前記決定工程において、
前記隣接するブロックの予測モードが取得できる場合は、前記第2のフレーム内における前記隣接するブロックに対応するブロックの予測モードを用いずに、前記隣接するブロックの予測モードを用いて、前記処理対象ブロックの予測モードを決定し、
前記隣接するブロックの予測モードが取得できない場合は、前記第2のフレーム内における前記予測モードが取得できないブロックに対応するブロックの予測モードを用いて、前記処理対象ブロックの予測モードを決定する
ことを特徴とする動画像符号化装置の制御方法。 - コンピュータを、請求項1から6、8から16のいずれか1項に記載の動画像符号化装置の各手段として機能させるためのコンピュータプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008011927A JP5111127B2 (ja) | 2008-01-22 | 2008-01-22 | 動画像符号化装置及びその制御方法、並びに、コンピュータプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008011927A JP5111127B2 (ja) | 2008-01-22 | 2008-01-22 | 動画像符号化装置及びその制御方法、並びに、コンピュータプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009177352A JP2009177352A (ja) | 2009-08-06 |
| JP2009177352A5 JP2009177352A5 (ja) | 2011-02-03 |
| JP5111127B2 true JP5111127B2 (ja) | 2012-12-26 |
Family
ID=41032017
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008011927A Expired - Fee Related JP5111127B2 (ja) | 2008-01-22 | 2008-01-22 | 動画像符号化装置及びその制御方法、並びに、コンピュータプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5111127B2 (ja) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5235818B2 (ja) * | 2009-08-11 | 2013-07-10 | キヤノン株式会社 | 動画像符号化装置、動画像符号化装置の制御方法及びプログラム |
| KR101452860B1 (ko) | 2009-08-17 | 2014-10-23 | 삼성전자주식회사 | 영상의 부호화 방법 및 장치, 영상 복호화 방법 및 장치 |
| US8644375B2 (en) | 2010-04-09 | 2014-02-04 | Sharp Laboratories Of America, Inc. | Methods and systems for intra prediction |
| CN105635737B (zh) | 2010-04-09 | 2019-03-15 | Lg电子株式会社 | 处理视频数据的方法和装置 |
| US20110249741A1 (en) * | 2010-04-09 | 2011-10-13 | Jie Zhao | Methods and Systems for Intra Prediction |
| US20110249734A1 (en) * | 2010-04-09 | 2011-10-13 | Segall Christopher A | Methods and Systems for Intra Prediction |
| US8619857B2 (en) * | 2010-04-09 | 2013-12-31 | Sharp Laboratories Of America, Inc. | Methods and systems for intra prediction |
| US20110249733A1 (en) * | 2010-04-09 | 2011-10-13 | Jie Zhao | Methods and Systems for Intra Prediction |
| US20110249735A1 (en) * | 2010-04-09 | 2011-10-13 | Jie Zhao | Methods and Systems for Intra Prediction |
| JP2012028858A (ja) * | 2010-07-20 | 2012-02-09 | Sony Corp | 画像処理装置及び画像処理方法 |
| KR101494562B1 (ko) | 2011-01-18 | 2015-02-17 | 후지쯔 가부시끼가이샤 | 동화상 부호화 장치, 동화상 부호화 방법 및 동화상 부호화용 컴퓨터 프로그램이 기록된 컴퓨터 판독가능한 기록 매체 |
| WO2012134046A2 (ko) * | 2011-04-01 | 2012-10-04 | 주식회사 아이벡스피티홀딩스 | 동영상의 부호화 방법 |
| KR101383775B1 (ko) | 2011-05-20 | 2014-04-14 | 주식회사 케이티 | 화면 내 예측 방법 및 장치 |
| RS56760B1 (sr) | 2011-06-28 | 2018-04-30 | Samsung Electronics Co Ltd | Ureðaj za dekodiranje videa korištenjem intra predikcije |
| CN104935929B (zh) * | 2011-10-24 | 2018-05-25 | 英孚布瑞智有限私人贸易公司 | 图像解码设备 |
| US9020031B2 (en) * | 2011-10-24 | 2015-04-28 | Infobridge Pte. Ltd. | Method and apparatus for decoding intra prediction mode |
| EP2804377A4 (en) * | 2012-01-13 | 2015-12-09 | Sharp Kk | Image Decoding Device, Image Coding Device and Data Structure of the Coded Data |
| KR101336622B1 (ko) | 2013-02-26 | 2013-12-16 | 에스케이플래닛 주식회사 | 오디오 데이터를 이용한 프레즌스 정보 제공 시스템, 이를 위한 장치 및 이를 위한 방법 |
| KR101606853B1 (ko) | 2014-05-15 | 2016-04-11 | 삼성전자주식회사 | 영상의 부호화 방법 및 장치, 영상 복호화 방법 및 장치 |
| KR101607611B1 (ko) | 2014-10-29 | 2016-03-30 | 삼성전자주식회사 | 영상의 부호화 방법 및 장치, 영상 복호화 방법 및 장치 |
| JP6501532B2 (ja) * | 2015-01-23 | 2019-04-17 | キヤノン株式会社 | 画像符号化装置、画像符号化方法及びプログラム |
| KR101607614B1 (ko) | 2015-07-23 | 2016-03-30 | 삼성전자주식회사 | 영상의 부호화 방법 및 장치, 영상 복호화 방법 및 장치 |
| KR101607613B1 (ko) | 2015-07-23 | 2016-03-30 | 삼성전자주식회사 | 영상의 부호화 방법 및 장치, 영상 복호화 방법 및 장치 |
| KR101886259B1 (ko) * | 2017-07-19 | 2018-08-08 | 삼성전자주식회사 | 영상 부호화 방법 및 장치, 및 부호화된 비트스트림을 포함하는 기록 매체 |
| KR101989160B1 (ko) * | 2018-08-01 | 2019-06-13 | 삼성전자주식회사 | 영상 부호화 방법 및 장치 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3520800B2 (ja) * | 1999-03-30 | 2004-04-19 | 株式会社日立製作所 | 画像復号化装置及び画像復号化方法 |
| JP4216769B2 (ja) * | 2004-06-02 | 2009-01-28 | 日本電信電話株式会社 | 動画像符号化方法、動画像符号化装置、動画像符号化プログラム及びそのプログラムを記録したコンピュータ読み取り可能な記録媒体 |
| JP2006005438A (ja) * | 2004-06-15 | 2006-01-05 | Sony Corp | 画像処理装置およびその方法 |
| US8885707B2 (en) * | 2005-04-01 | 2014-11-11 | Panasonic Corporation | Image decoding apparatus and image decoding method |
| TWI344792B (en) * | 2006-07-12 | 2011-07-01 | Lg Electronics Inc | A method and apparatus for processing a signal |
-
2008
- 2008-01-22 JP JP2008011927A patent/JP5111127B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009177352A (ja) | 2009-08-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5111127B2 (ja) | 動画像符号化装置及びその制御方法、並びに、コンピュータプログラム | |
| US8126052B2 (en) | Motion image encoding apparatus, motion image decoding apparatus, motion image encoding method, motion image decoding method, motion image encoding program, and motion image decoding program | |
| JP5197591B2 (ja) | 映像符号化方法及び復号方法、それらの装置、それらのプログラム並びにプログラムを記録した記録媒体 | |
| EP3174297B1 (en) | Video encoding and decoding with improved error resilience | |
| US9743088B2 (en) | Video encoder and video encoding method | |
| CN102752593B (zh) | 估计运动矢量的方法和设备,编码器/解码器和解码方法 | |
| US9031125B2 (en) | Image predictive encoding and decoding device | |
| WO2010001916A1 (ja) | 画像処理装置および方法 | |
| WO2011013253A1 (ja) | 幾何変換動き補償予測を用いる予測信号生成装置、動画像符号化装置及び動画像復号化装置 | |
| JP4939273B2 (ja) | 画像符号化装置及び画像符号化方法 | |
| US20140233645A1 (en) | Moving image encoding apparatus, method of controlling the same, and program | |
| US8792549B2 (en) | Decoder-derived geometric transformations for motion compensated inter prediction | |
| JP5178616B2 (ja) | シーンチェンジ検出装置および映像記録装置 | |
| CN104885462A (zh) | 视频编码装置和方法、视频解码装置和方法、以及其程序 | |
| JP2010183162A (ja) | 動画像符号化装置 | |
| JP4732184B2 (ja) | 動画像符号化装置及びその制御方法、コンピュータプログラム、記憶媒体 | |
| JP4958825B2 (ja) | 動画像符号化装置及びその制御方法、コンピュータプログラム | |
| JP4971817B2 (ja) | 画像符号化装置 | |
| JP4677351B2 (ja) | 動き補償器、動き補償処理方法、コンピュータプログラム及び記憶媒体 | |
| JP4898415B2 (ja) | 動画像符号化装置及び動画像符号化方法 | |
| JP5281597B2 (ja) | 動きベクトル予測方法,動きベクトル予測装置および動きベクトル予測プログラム | |
| JP4708821B2 (ja) | 動画像符号化装置及びその制御方法、コンピュータプログラム及び記憶媒体 | |
| JP5235813B2 (ja) | 動画像符号化装置、動画像符号化方法及びコンピュータプログラム | |
| JP2011041014A (ja) | 動画像符号化装置、動画像符号化装置の制御方法及びプログラム | |
| JP2006074520A (ja) | 動きベクトル検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101214 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101214 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111107 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111111 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120106 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120907 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121009 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151019 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5111127 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151019 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |