JP5049251B2 - モータ制御装置 - Google Patents
モータ制御装置 Download PDFInfo
- Publication number
- JP5049251B2 JP5049251B2 JP2008291921A JP2008291921A JP5049251B2 JP 5049251 B2 JP5049251 B2 JP 5049251B2 JP 2008291921 A JP2008291921 A JP 2008291921A JP 2008291921 A JP2008291921 A JP 2008291921A JP 5049251 B2 JP5049251 B2 JP 5049251B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- circuit
- control device
- resistor
- semiconductor switch
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Landscapes
- Control Of Ac Motors In General (AREA)
- Stopping Of Electric Motors (AREA)
Description
図12は従来のモータ制御装置における回生エネルギー処理回路とDB回路とを示す図であり、図13は従来のモータ制御装置におけるDB回路の簡略化を示す図である。
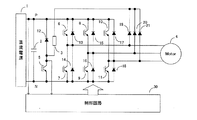
モータ制御装置は、一般的に、3相交流電源を入力としダイオードを用いた整流回路と平滑コンデンサによって直流電源を作り、直流電源を3相交流に変換するインバータブリッジで3相のモータを駆動するものである。
この直流電圧の上昇を抑制する方法として、図12のように直流配線に抵抗3と半導体スイッチ5を直列接続し、半導体スイッチ5の保護用ダイオード12を備えた回生エネルギー処理回路が用いられる。回生エネルギー処理回路のダイオード12は、半導体スイッチ5がオフした際に、抵抗3の配線インダクタンスに起因するサージ電圧を抑制するために必要である。回生エネルギー処理回路は、直流電圧が閾値よりも上昇すると制御回路によって半導体スイッチ5をオンし、抵抗3によってサーボモータ4からの回生エネルギーを消費する。従って、回生エネルギー処理回路の抵抗3は、サーボモータ4からの回生電力量を消費しなければならず、かなり大きなサイズの抵抗が必要となるのである。
このように、従来のモータ制御装置は、前述のように、回生エネルギー処理回路およびDB回路が必要なために、それぞれ追加の回路と大きなサイズの抵抗を備える必要があり、モータ制御装置自体の小形化または低価格化ができないという問題があった。
図14は、第1の従来技術におけるモータ制御装置の概略構成図である。図において、1はAC電源供給部、3は整流部、5はコンデンサー、7はモーター、9はインバーター部、11は過電圧保護スイッチング素子、13はダイナミックブレーキング抵抗、15は抵抗、17は過電圧保護ダイオード、19は多接点リレーである。なお、図面に付した符号は、第1の従来技術である特許文献1に付された符号と同一のものを用いて説明している。
図15は、第2の従来技術におけるモータ制御装置の概略構成図である。図において、1A〜1Cはモータ、2A〜2Cはインバータ回路、3は整流回路、4は主回路コンデンサ、5は電圧監視回路、6は回生抵抗、7,7´は回生用トランジスタ(スイッチング手段)、8,8´は制御回路(制御信号発生回路)、9A〜9Cはインバータ駆動回路、10は制御電源回路、11は電源監視回路、12は回生検出回路である。なお、図面に付した符号は、第2の従来技術である特許文献2に付された符号と同一のものを用いて説明している。
また、第1の従来技術におけるモータ制御装置(特許文献1)では、比較的小サイズでよい突入電流防止用の抵抗は省略できるが、回生エネルギー処理回路については言及されておらず、大きなサイズの回生エネルギー処理回路とDB回路の抵抗を共用することができない。また、直流電源の配線上に接点を備えることで抵抗部品を共用して部品数を減少し、製品サイズ及び製造コストを減らすことを実現しているが、通常のサーボモータを駆動する運転時に、この接点部での損失が増加してしまい、一般的なモータ制御装置よりも効率が低下するという問題もあった。
また、第2の従来技術におけるモータ制御装置(特許文献2)では、直流電源の配線上に半導体スイッチを設けているので、通常の運転時にリレー接点よりもさらに大幅に損失が増加し、この半導体スイッチの冷却装置も必要となり、一般的なモータ制御装置よりも大幅に効率が低下し、大形化してしまうという問題があった。
また、第3の従来技術におけるモータ制御装置(特許文献3)では、「回生処理回路で用いるスイッチング手段として、制御端子に制御信号が入力されているときにはオフ状態となり、制御端子に制御信号が入力されていないときにはオン状態になるノーマリーオン構造の回生用トランジスタ7を用い」ているので、停電時でない場合にダイナミックブレーキを行うことができない。また、停電時でない場合にダイナミックブレーキ動作を行うと直流電源から抵抗へ電力が供給されるので抵抗が焼損してしまうという問題があった。
本発明はこのような問題点に鑑みてなされたものであり、回生エネルギー処理回路とDB回路を備えるものであって、回生エネルギー処理回路の抵抗とDB回路の抵抗とを共用すると共に両回路を簡単化し、また、サーボモータ駆動時の両回路における損失を抑制し、装置自体の小形化または低コスト化を図ることができるモータ制御装置を提供することを目的とする。
本発明の一の観点によるモータ制御装置は、直流電源と、前記直流電源の正側負側間に接続する平滑コンデンサと、前記直流電源からの直流電力を交流電力に変換してモータへ供給するインバータブリッジを含むインバータブリッジ回路と、前記インバータブリッジ回路にPWM制御信号を出力する制御回路と、前記インバータブリッジの出力端それぞれにアノード端子を個別に接続する複数のダイオードと、複数の前記ダイオードのカソード端子をコモン接続すると共に、該コモン端子とその一端とを接続する共通抵抗と、前記共通抵抗の他端とその一端とを接続すると共に、前記直流電源の負側とその他端とを接続する半導体スイッチと、前記半導体スイッチの一端とアノード端子とを接続すると共に、前記直流電源の正側とカソード端子とを接続する他のダイオードと、を備えたモータ制御装置が適用される。
また、簡単な回路の増設で回生動作とDB動作の抵抗値を調整することができるので、サーボドライブ装置の性能と安全性を向上することができる。また、回生用の抵抗とダイナミックブレーキ用の抵抗とを分けて設計したい場合や抵抗値を状況に応じて細かく調整したい場合、容易に対応することができ、最適な両回路動作をさせることができ、モータ制御装置自体の信頼性向上を図ることができる。
また、PWM動作によって回生エネルギーの消費量を調整・増加させることができるので、更に装置自体の小形化または低コスト化を図ることができる。
本発明における回生エネルギー処理回路またはDB回路は、抵抗3、半導体スイッチ5、ダイオード12、ダイオード19乃至21で構成されるものであり、抵抗3が両回路に共用する抵抗となるものである。
また、制御装置30は、直流電源1のPとNの端子間電圧である主回路電圧(VPN)を監視し、適宜、半導体スイッチ5をオンオフ動作させるものである。
図2において点線矢印が回生時の電流経路であり、図1における制御回路30は、図示するように半導体スイッチ5,6,8,10をオン動作させると、平滑コンデンサ2に蓄えられたエネルギーは該電流経路を通って、抵抗3によって消費されるのである。
また、図3において点線矢印がDB時の電流経路であり、図1における制御回路30は、図示するように半導体スイッチ5のみをオン動作させると、モータ4からのDBエネルギーは該電流経路を通って、抵抗3によって消費されるのである。
このように、回生時またはDB時にオン動作させる半導体スイッチを可変することにより、抵抗3を共用できると共に、簡単な回路構成により、回生エネルギー処理回路とDB回路とを構成できるのである。
しかしながら、PWM動作の中で、半導体スイッチ6、8、10がオン、半導体スイッチ7、9、11がオフであって、インバータブリッジの全ての出力電圧が直流電源1のP(正)の端子電圧となり、モータ4へ印加される線間電圧は零となる状態(線間出力零電圧状態)、または、半導体スイッチ6、8、10がオフ、半導体スイッチ7、9、11がオンであって、インバータブリッジの全ての出力電圧が直流電源1のN(負)の端子電圧となり、モータ4へ印加される線間電圧は零となる状態(線間出力零電圧状態)では、電流はモータ4の配線内で閉じてしまうので、平滑コンデンサ3への充電は行われないのである。
前述のように、半導体スイッチ6、8、10がオンの線間出力零電圧状態で半導体スイッチ5がオンすると、主回路の平滑コンデンサに蓄えられたエネルギーは、抵抗に移動し消費される。このとき半導体スイッチ6、8、10には、モータの負荷電流方向によって、モータの電流と平滑コンデンサから抵抗へ流れる電流の和が流れることとなり、半導体スイッチの損失が従来のモータ制御装置よりも増加することもある。しかしながら、回生エネルギー処理は、もともとエネルギーを抵抗の損失へ変えるものであるので、この動作時に損失が増えることはモータ制御装置の効率には影響なく問題ないものである。なお、この電流増加に伴う損失増加が、半導体スイッチ5、6、8、10の冷却能力を超えないように抵抗3の値を決めるか、駆動する負荷側で回生エネルギー量を制限する必要がある。
前述のように、抵抗3による回生エネルギー処理動作は、半導体スイッチ6、8、10が全てオンとなる線間出力零電圧状態の条件下のみで行われる。この線間出力零電圧状態の期間は、インバータブリッジの出力電圧に依存し、出力電圧が高い場合は、この期間が非常に短くなる。モータ4から電力を回生する条件では、インバータ出力電圧 < モータ電圧(モータの電圧はモータ回転速度に依存)となるため、線間出力零電圧の期間は、ある程度確保される傾向になる。
本発明におけるモータ制御装置のダイナミックブレーキ動作は、図1における制御回路30が入力電源の停電、装置故障などを監視して、ダイナミックブレーキを用いた非常停止の必要性を判断した上で行うものである。
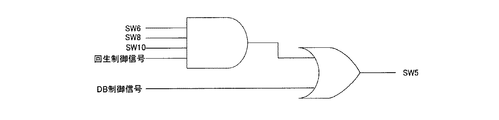
ダイナミックブレーキを行う場合には、制御回路は、DB制御信号をオン、かつ半導体スイッチ6〜11の信号SW6〜SW11の全てをオフとし、半導体スイッチ5の信号SW5をオンとして半導体スイッチ5をオン動作させる。この時のDB時の電流経路は、図3の例に示すような経路を通って、電力が抵抗3によって消費されるのである。
前述のように、ダイナミックブレーキを行うと、モータからのエネルギーは図3に示すDB時の電流経路を介して電力が抵抗3で消費されるので、主回路電圧を下げることはできなくなる。しかしながら、モータから平滑コンデンサ2への充電がなくなるので、平滑コンデンサの電位上昇も止まり、主回路電圧がON Level以下であれば、平滑コンデンサ2等の部品の電圧破壊もないため、この電圧で保持されても問題はない。
したがって、回生エネルギー処理回路動作からDB動作へ移行する場合においても、主回路電圧がON Level以下であれば、ダイナミックブレーキを行っても何ら問題はないのである。逆に、回生エネルギー処理回路動作中の主回路電圧がON Level以上である間は、ダイナミックブレーキを行わない等のシーケンス処理か、負荷装置の保護を優先する場合はダイナミックブレーキを行い、ON Levelの値を若干超える値も平滑コンデンサ2など主回路電圧が印加される部品が破壊しないレベルに設計することが必要である。
回生エネルギーの消費電力とダイナミックブレーキの消費電力は、モータ制御装置が利用される負荷装置の容量や、その運転条件によって決まるので、その条件に応じて、それぞれ違う最適値が存在することが知られている。
回生エネルギーは負荷に依存するものであって、モータ制御装置の数〜数十%程度であり、モータ制御装置の利用時にその抵抗値R1が設計される。また、ダイナミックブレーキは、モータの巻線インダクタンスと巻線抵抗、回転数によって、最短時間で停止する抵抗値の最適値R2が決まるので、モータ固有の値となる。
したがって、抵抗の容量は、一般的に回生用抵抗の方が大きいので、抵抗サイズは必要な回生エネルギー消費量に合わせるように設計すればよい。
なお、図11は抵抗回路を1つ増設する例を示したが、増設数をさらに増やしてもよい。また、抵抗を多数並列接続するよう構成すれば、各抵抗の有効あるいは無効の組み合わせにより、細かい抵抗値の調整が可能となり、ブレーキ時の力の可変もできるようになる。
2 平滑コンデンサ
3、25、28 抵抗
4 モータ
5〜11、27 半導体スイッチ
12〜21、29 ダイオード
30 制御回路
Claims (11)
- 直流電源と、
前記直流電源の正側負側間に接続する平滑コンデンサと、
前記直流電源からの直流電力を交流電力に変換してモータへ供給するインバータブリッジを含むインバータブリッジ回路と、
前記インバータブリッジ回路にPWM制御信号を出力する制御回路と、
前記インバータブリッジの出力端それぞれにアノード端子を個別に接続する複数のダイオードと、
複数の前記ダイオードのカソード端子をコモン接続すると共に、該コモン端子とその一端とを接続する共通抵抗と、
前記共通抵抗の他端とその一端とを接続すると共に、前記直流電源の負側とその他端とを接続する半導体スイッチと、
前記半導体スイッチの一端とアノード端子とを接続すると共に、前記直流電源の正側とカソード端子とを接続する他のダイオードと、を備えたことを特徴とするモータ制御装置。 - 前記制御回路が、前記共通抵抗が前記モータからの回生電力を処理する回生抵抗と前記モータからの制動電力を処理する制動抵抗とを兼ねるように、前記インバータブリッジまたは前記半導体スイッチをオンオフ動作させることを特徴とする請求項1に記載のモータ制御装置。
- 前記制御回路が、ダイナミックブレーキの場合、前記インバータブリッジを全てオフ動作、かつ前記半導体スイッチをオン動作させ、
回生の場合、前記インバータブリッジの出力電圧が、全て、前記直流電源の正側電圧となる前記PWM制御信号のタイミング時に、前記半導体スイッチをオン動作させることを特徴とする請求項1または2に記載のモータ制御装置。 - 前記制御回路が、ダイナミックブレーキの場合、前記インバータブリッジを全てオフ動作、かつ前記半導体スイッチをオン動作させ、
回生の場合、前記インバータブリッジから前記モータに印加される線間電圧がゼロ状態となる前記PWM制御信号のタイミング時に、前記半導体スイッチをオン動作させることを特徴とする請求項1または2に記載のモータ制御装置。 - 前記共通抵抗、前記半導体スイッチ、前記他のダイオードの組みを複数組み備えることを特徴とする請求項1〜4いずれか1項に記載のモータ制御装置。
- 前記複数組みの互いの前記共通抵抗を並列接続することを特徴とする請求項5に記載のモータ制御装置。
- 前記複数組みの互いの前記共通抵抗を直列接続することを特徴とする請求項5に記載のモータ制御装置。
- 前記制御回路が、前記インバータブリッジの出力電圧が、全て、前記直流電源の正側電圧となる前記PWM制御信号の時間を調整することを特徴とする請求項1〜5のいずれか1項に記載のモータ制御装置。
- 前記制御回路が、前記PWM制御信号を生成するための電圧指令に対して、オフセット量を加えて前記PWM制御信号の時間を調整することを特徴とする請求項8に記載のモータ制御装置。
- 前記制御回路が、前記インバータブリッジの出力電圧が、全て、前記直流電源の正側電圧となる前記PWM制御信号の時間を、PWM周期中に可変することを特徴とする請求項1〜5のいずれか1項に記載のモータ制御装置。
- 前記制御回路が、前記PWM制御信号を生成するための電圧指令に対して、オフセット量を加えて前記PWM制御信号の時間を、PWM周期中に可変することを特徴とする請求項10に記載のモータ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008291921A JP5049251B2 (ja) | 2008-11-14 | 2008-11-14 | モータ制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008291921A JP5049251B2 (ja) | 2008-11-14 | 2008-11-14 | モータ制御装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012161887A Division JP2012196143A (ja) | 2012-07-20 | 2012-07-20 | モータ制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010119253A JP2010119253A (ja) | 2010-05-27 |
| JP2010119253A5 JP2010119253A5 (ja) | 2011-10-20 |
| JP5049251B2 true JP5049251B2 (ja) | 2012-10-17 |
Family
ID=42306519
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008291921A Expired - Fee Related JP5049251B2 (ja) | 2008-11-14 | 2008-11-14 | モータ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5049251B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2714717T3 (es) * | 2012-08-22 | 2019-05-29 | Otis Elevator Co | Sistema de ascensor que utiliza frenado dinámico |
| JP5918406B1 (ja) * | 2015-02-19 | 2016-05-18 | 株式会社荏原製作所 | ドライ真空ポンプ装置およびその制御方法 |
| JP7002522B2 (ja) * | 2019-12-13 | 2022-01-20 | シナノケンシ株式会社 | モータ駆動装置 |
| CN113765438A (zh) * | 2020-06-01 | 2021-12-07 | 施耐德电器工业公司 | 制动控制电路、电动机制动控制方法及系统 |
| CN117388682A (zh) * | 2022-07-04 | 2024-01-12 | 恩智浦美国有限公司 | 用于诊断逆变器中的开关故障和/或缺相的方法 |
| CN117895867B (zh) * | 2024-03-18 | 2024-06-25 | 浙江禾川科技股份有限公司 | 一种伺服驱动器的动态制动控制方法、装置以及介质 |
-
2008
- 2008-11-14 JP JP2008291921A patent/JP5049251B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010119253A (ja) | 2010-05-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012196143A (ja) | モータ制御装置 | |
| JP6285477B2 (ja) | ダイナミックブレーキ回路保護機能を有するモータ駆動装置 | |
| JP5049251B2 (ja) | モータ制御装置 | |
| JP5716715B2 (ja) | 車両用回転電機 | |
| JP5641448B2 (ja) | 車両用回転電機 | |
| JP6183460B2 (ja) | インバータ装置 | |
| JP2010268625A (ja) | 電力供給装置 | |
| US20090230898A1 (en) | Servo amplifier with regenerative function | |
| JP6944546B2 (ja) | 電力変換装置 | |
| JP6469894B2 (ja) | 電力変換装置 | |
| JP2016073127A (ja) | インバータ制御装置、電力変換装置、および、電動車両 | |
| WO2016157391A1 (ja) | 駆動装置、マトリクスコンバータ及びエレベータシステム | |
| JP2008017649A (ja) | 過電流検出回路 | |
| JP7424407B2 (ja) | 制御装置、モータ駆動装置及びモータ駆動システム | |
| CN111052582B (zh) | 变频器、变频器组件及其控制方法 | |
| WO2022158052A1 (ja) | ゲート駆動回路および電力変換装置 | |
| US20240178646A1 (en) | Motor drive device provided with charging control unit | |
| JP6119531B2 (ja) | 車両用回転電機 | |
| JP7536457B2 (ja) | モータドライバ、モータドライバの制御回路、及びモータドライバの制御方法 | |
| JP7421435B2 (ja) | モータ制御装置およびモータ制御方法 | |
| WO2019167427A1 (ja) | モータの駆動制御装置およびモータの駆動制御方法 | |
| WO2023187863A1 (ja) | 駆動回路、駆動回路の制御方法 | |
| JP5268819B2 (ja) | モータ制御装置 | |
| JP2016226234A (ja) | インバータ制御装置、電力変換装置および車両 | |
| JP2006094654A (ja) | 多直列接続された自己消弧型素子のゲート制御方法及びこれを用いた電力変換装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100614 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110907 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20120216 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120606 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120626 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120720 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150727 Year of fee payment: 3 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |