以下、本発明の実施の形態について図面を参照しながら詳述する。
(実施の形態1)
実施の形態1では、計量装置としてトラックスケールを用いた場合について説明する。なお、実施の形態1に係る計量装置はトラックスケールに限定されるわけではなく、例えば台秤などの非自動はかりであればよい。
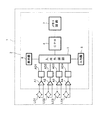
図1は、本発明の実施の形態1に係る計量装置であるトラックスケールの構成を示すブロック図である。図1に示すように、トラックスケール1は、計量載せ台(図示せず)の下方に配置されたロードセルLC1,LC2,LC3,LC4と、これらの各ロードセルLC1,LC2,LC3,LC4から出力される重量信号に基づいて被計量物の重量測定値を演算する重量測定装置2とを備えている。
重量測定装置2は、各ロードセルLC1,LC2,LC3,LC4とそれぞれ接続される演算増幅器A1,A2,A3,A4およびA/D変換器AD1,AD2,AD3,AD4を備えている。また、重量測定装置2は、入出力回路3を備えており、当該入出力回路3には、前述したA/D変換器AD1,AD2,AD3,AD4、CPU4、入力器5、および表示器6が接続されている。ここで、入力器5は、零点調整およびスパン調整などの実施をCPU4に対して指示するための入力キー(後述する基準零点記憶キー、零調整キーを含む)などで構成されている。また、表示器6は、CPU4によって演算された各種のデータを表示するための液晶表示ディスプレイなどで構成されている。
CPU4はメモリ回路7とデータバスラインを介して接続されている。このメモリ回路7は、CPU4によって実行されるプログラムおよび各種のデータを一時的または長期に記憶するためのPROM,RAM,EEPROMなどで構成されている。
A/D変換器AD1,AD2,AD3,AD4は、各ロードセルLC1,LC2,LC3,LC4から出力された後に各演算増幅器A1,A2,A3,A4にて増幅されたアナログ重量信号をデジタル重量信号へ変換し、変換後のデジタル重量信号をCPU4に対して出力する。CPU4は入力されたデジタル重量信号に基づいて被計量物の重量を演算し、その演算した重量を示す情報を表示器6に対して出力する。表示器6は、CPU4から入力された重量を示す情報にしたがって被計量物の重量を表示する。
重量測定装置2は、トラックスケール1及びトラックスケール1が設置されている環境が正常な場合であって、計量載せ台上に被計量物が載置されていないとき(計量載せ台に付着物がなく、しかも重量信号に振動信号が含まれていない等、零点重量値を正確に測定することができるとき)の重量測定値である零点重量値(以下、零点基準値という)を予め測定している。このようにして測定された零点基準値は、メモリ回路7に記憶されている。
以上のように構成されたトラックスケール1では、動作モードとして、(1)通常運転モードにおいて重量測定装置2または重量測定装置2の置かれた環境の正常・異常を判定するための条件を設定するための調整モードと、(2)重量測定装置2を運転しながら重量測定装置2または重量測定装置2の置かれた環境の正常・異常を判定するための通常運転モードとが用意されている。また、(A)零点重量値が異常に大きく変動する現象が生じるか否かを未だ変動量が小さい時点で判定する処理と、(B)零点重量値によって異常な大きさの振動信号が存在するか否かを判定する処理とを実行する。
なお、重量測定装置2には、例えばトラックスケールのように、計量載せ台上に被計量物が置かれていないことを使用者が確認して零調整動作を行うことによって零点重量値を得る方式の計量器と、例えば組み合わせ秤、重量式充填機のように、計量載せ台上に被計量物が置かれていないことを自動的に認識して零点重量値を得る方式の計量器とがある。
以下では、前記(A)及び(B)の場合それぞれについて、2つのモード別にトラックスケール1の動作を説明する。
(A)零点重量値が異常に大きく変動する現象が生じるか否かを未だ変動量が小さい時点で判定する処理
零点重量値が、比較的長い時間をかけて、調整時に設定した零点基準値を中心に設定された零点変動量の正常範囲を超えると、重量測定装置2に異常が発生したと判定することになる。しかしながら、重量測定装置2が故障した場合または使用条件を超えるような環境の変化が生じた場合等においては、比較的短い期間で零点重量値が変動し正確な計量動作ができなくなることがある。したがって、このような場合でも重量測定装置2に異常が発生したと判定し、使用者に対して警告することが必要となる。
そこで、本発明においては、零点重量値の変動量が零点変動量の正常範囲内の大きさであっても、零点計測動作の間の零点変動量が許容限界零点変動量を超えているか否か、または零点変動量の時間変化率が許容限界の零点変動量の時間変化率を超えているか否かを判定する。
[調整モード]
非自動はかりの場合、調整モードおよび通常運転モードの何れにおいても、秤の使用者が、計量載せ台上に被計量物および付着物がない状態での重量値を零点と判断する。ここで非自動はかりとは、通常運転モードにおいて零点調整、すなわち零点計測および被計量物の重量測定が使用者によって人為的に行われる秤を意味している。
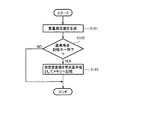
図2Aは、調整モードにおいて、零点基準値を設定する場合における、本発明の実施の形態1に係るトラックスケール1が備える重量測定装置2の動作の流れを示すフローチャートである。
まず、重量測定装置2は、一定時間毎に、重量測定値を生成する(S101)。使用者は、計量載せ台上の状態を確認し、その結果重量測定装置2が零点計測状態にあると判断した場合、入力器5に設けられた基準零点記憶キーを押下する。重量測定装置2は、基準零点記憶キーが押下されたか否かを判定し(S102)、押下されていないと判定した場合(S102でNO)は処理を終了する。一方、押下されたと判定した場合(S102でYES)、重量測定装置2はその押下された時点での重量測定値を零点重量値と判断し、この零点重量値を零点基準値としてメモリ回路7に記憶する(S103)。
図2Bは、調整モードにおいて、零点重量値の正常範囲を設定する場合における、本発明の実施の形態1に係るトラックスケール1が備える重量測定装置2の動作の流れを示すフローチャートである。
使用者は、零点基準値に対する上下限値±Wu、すなわち零点重量値の正常範囲Rを入力器5を用いて入力する。重量測定装置2は、この入力を受け付け(S101')、受け付けた零点重量値の正常範囲Rをメモリ回路7に記憶する(S102')。
さらに、調整モードにおいては、次のような処理が実行される。図3は、調整モードにおいて、零点変動量の正常範囲を設定する場合における、本発明の実施の形態1に係るトラックスケール1が備える重量測定装置2の動作の流れを示すフローチャートである。
使用者は、2つの時点の零点重量値の差である零点重量値の変動量(以下、零点変動量という)に対する上下限値±wu、すなわち零点変動量の正常範囲rを入力器5を用いて入力する。重量測定装置2は、この入力を受け付け(S101'')、受け付けた零点重量値の正常範囲Rをメモリ回路7に記憶する(S102'')。
なお、重量選別機、組み合わせ秤、重量式充填機等の自動はかりの場合、計量器の零点が自動的に判断されるため、零点計測は自動的に実行される。ここで、自動はかりとは、通常運転モードにおいて零点計測、被計量物の重量測定を自動的に実行する秤を意味する。
しかしながら、本発明では、調整モードにおいて、自動はかりも非自動はかりと同様に重量測定動作を実行し、零点重量値の正常範囲Rおよび零点変動量の正常な範囲rが非自動はかりの場合と同様にして設定される。
図4は、以上のようにして設定された零点重量値の正常範囲Rおよび零点変動量の正常範囲rを説明するためのグラフである。図4において、Wiは零点基準値を、±Wuは零点重量値が零点基準値に対する正常範囲R内にあるか否かを判定するための上下限値をそれぞれ示している。
時間t1において、使用者が重量測定装置2の入力機5に含まれる零調整キーを押下した場合、その押下されたときに生成された重量測定値である零点重量値Wzt1と零点基準値Wiとの差である零点偏差量wzt1が算出される。ここで、零点偏差量wzt1が零点重量値の正常範囲R内に入っていればt1の時点の零点重量値Wzt1は正常であり、入っていない場合は異常であると判定されることになる。
同様にして、時間t2において、使用者が重量測定装置2の入力機5に含まれる零調整キーを押下した場合、その押下されたときに生成された重量測定値である零点重量値Wzt2と零点基準値Wiとの差である零点偏差量wzt2が算出される。ここで、零点偏差量wzt2が零点重量値の正常範囲R内に入っていればt1の時点の零点重量値Wzt2は正常と判定され、入っていない場合は異常であると判定されることになる。
また、零点重量値Wzt1とWzt2との差wzeが零点変動量として以下の式1に基づいて算出される。
wze=Wzt2−Wzt1 …式1
ここで、零点変動量wzeが零点変動量の正常範囲r内に入っていれば零点変動量wzeは正常と判定され、入っていない場合は異常であると判定される。
零点変動量が正常であると判定される範囲は、正常な重量測定装置2において、一定時間以内に行われた零点計測により求められる零点変動量から導かれる許容最大零点変動量によって定められる。したがって、重量測定装置2は、時間t1とt2との時間間隔を求め、求めた時間間隔が所定時間よりも長いと判断した場合には、時間t1の時点の零点重量値は消去され、時間t2の時点の零点重量値と次の時間t3の時点の零点重量値との差を新たな零点変動量として異常判定が行われる。
なお、重量測定装置2が自動はかりの場合は自動的に零点計測が行われて零点重量値が得られる。一定の時間間隔で零点計測が行われる場合であれば、その時間間隔で前述したような異常判定が行われることになる。
[通常運転モード]
通常運転モードにおいては、後述するように、零点調整キーが押下されたときに得られる零点重量値が正常範囲R内にあるか否か、さらに零点変動量が正常範囲r内にあるか否かを判定する。
なお、図示していないが、重量測定装置2は、零点調整キーが押下されてから次に同じく押下されるまでの時間を、数msec単位の一定の時間間隔でカウントする零点調整時間間隔カウンタが設けられている。
図5は、本発明の実施の形態1に係る計量装置であるトラックスケール1が備える重量測定装置2の通常運転モードにおける動作の流れを示すフローチャートである。
重量測定装置2は、重量測定値を一定の時間間隔で生成し(S111)、使用者によって零点調整キーが押下されたか否かを判定する(S112)。ここで、零点調整キーが押下されていないと判定した場合(S112でNO)、重量測定装置2は処理は終了する。零点調整キーが押下されていなければ、重量測定値は被計量物の重量の測定結果である可能性があるので、以下のような異常判定処理は実行されない。
一方、ステップS112にて零点調整キーが押下されたと判定した場合(S112でYES)、重量測定装置2は、その押下されたときの重量測定値である零点重量値が正常範囲R内にあるか否かを判定する(S113)。ここで、零点重量値が正常範囲R内にないと判定した場合(S113でNO)、重量測定装置2は零点重量値が異常であることを示す零点異常警報を表示器6に表示する(S114)。これに対して零点重量値が正常範囲R内にあると判定した場合(S113でYES)、零点調整時間間隔カウンタの値を読み取り、前回零点調整キーが押下されたときと今回零点調整キーが押下されたときとの間の時間間隔が規定値以内である否かを判定する(S115)。
ステップS115にて時間間隔が規定値を超えていると判定した場合(S115でNO)、重量測定装置2は、以下の零点変動量の異常判定を実行せず次回に行うために今回の零点重量値をメモリ回路7に記憶し(S119)、零点調整時間隔カウンタの値をクリアすることによりリセットする(S120)。一方、時間間隔が規定値以内であると判定した場合(S115でYES)、重量測定装置2は、今回の零点重量値とメモリ回路7に記憶されている前回の零点重量値との差から零点変動量wzeを求める(S116)。
次に、重量測定装置2は、零点変動量wzeの絶対値|wze|と正常な零点変動量の許容最大値である|wu|との大きさを比較し(S117)、|wze|が|wu|を超える場合は零点変動量に異常があると判定し零点変動量が異常であることを示す零点変動量異常警報を表示器6に表示する(S118)。その後、重量測定装置2は、前述したステップS119およびS120を実行する。
以上のように重量測定装置2が動作することによって、零点重量値が長期的に正常範囲R内に含まれていたとしても、規定時間間隔内における零点変動量が正常範囲r内にない場合は零点変動量が異常であると判定することができるため、零点の異常を正確に検出することができる。
なお、本実施の形態ではある零点調整から次の零点調整までの間の時間を測定しているので、この零点調整時間間隔をTzとすると、ステップS116で求めた零点変動量wzeをTzで除することによって零点時間変化率|wze|/Tzを導くことができる。そこで、予め調整モードにて正常な零点変動量の許容最大値である|wu|の代わりに零点変動量の許容限界時間変化率Atを設定しておき、通常運転モードにて零点調整が行われる都度、時間測定値と零点変動量とから零点時間変化率|wze|/Tzを算出して許容限界時間変化率Atと大小比較することにより異常判定を行うようにしてもよい。
このように、所定時間当たりの零点重量値の変化量が所定の範囲内にあるか否かによって異常判定を行うことが可能である。
(B)零点重量値に基づいて異常な大きさの振動信号が存在するか否かを判定する処理
重量測定装置2の置かれた環境または重量センサの特性が悪化した場合、例えば床振動が増えたような場合であって、重量測定値が正確に測定できなくなったときは、できる限り早い時期に使用者に対して異常を知らせる必要がある。
ところで、計量装置において実際に使用者に利用される重量測定値は、表示器6に表示される重量値(以下、表示重量値という)である。通常、計量装置において、重量測定値は表示重量値よりも高い分解能でもって測定される(以下、このように測定される重量測定値を内部重量値という)。例えば、内部重量値の5カウントが表示重量値の1カウントとされる。したがって、振動信号の振幅が増えたために内部重量値のばらつきが増えたとしても、表示重量値のばらつきとして現れにくい。
非自動はかりの場合、使用者が表示重量値のちらつきを目視によって確認することができるが、表示重量値の最小表示量に影響が出る程度しか表示重量値のばらつきがないときでは、表示重量値のちらつきを発見することは難しい。その結果、誤計量を継続するおそれがある。
一方、自動はかりの場合、通常運転中は被計量物の重量を測定する毎に表示重量値が固定されるため、使用者は表示重量値のばらつきを目視によって確認することができない。
使用者にとっては、非自動はかり、自動はかりの別に関わらず、できる限り早い時期に重量信号のばらつきを感度良く自動的に検出し、フィルタを再調整したり、振動発生源を突き止めて環境改善を行う等して、高精度な重量測定を維持させる必要がある。
重量測定装置によって出力される重量信号のばらつきを感度よく判定するためには、表示重量値よりも分解能が高い内部重量値に基づいて重量信号のばらつき度を判定することが望ましい。
自動はかりの場合、計量載せ台上に被計量物が載置されている時間が極めて短いため、その時間内に重量信号のばらつきを測定して評価することは困難である。したがって、零点計測中に重量信号のばらつきの測定・評価を行う。
一方、非自動はかりの場合、計量載せ台上に被計量物が載置されている時間が比較的長いときは重量信号のばらつきの測定・評価を行うことが可能であるが、被計量物の負荷によって引き起こされる計量装置の固有振動が続くようなときは重量信号のばらつきに影響があるので、自動はかりの場合と同様に零点計測中に重量信号のばらつきの測定・評価を行うことが望ましい。
自動はかりの場合は零点計測のタイミングを計量装置自身が把握するので、計量装置が零点計測中であると判断したときの重量測定値は零点重量値であり、零点重量値のばらつき度によって重量信号のばらつきの測定・評価を行う。
これに対して、非自動はかりの場合、通常では計量装置が零点計測を行っていると判定できるのは使用者が零点調整キーを押下した場合のみである。したがって、重量測定値が零点重量値であると自動的に判定することはできない。そこで、本実施の形態では、使用者によって入力された零点重量値を基準値として、その基準値に対して所定の上下限値を設定し、重量測定値がその上下限値の範囲内に入った場合にその重量測定値を零点重量値と判定するようにすれば、非自動はかりの場合であっても、重量測定値が零点重量値であるか否かを自動的に判定することができる。この上下限値の範囲(以下、零点判定範囲という)を広く設定しすぎると零点重量値であるか否かを正確に判定することができなくなる。したがって、零点判定範囲をあまり広く設定することはできないが、その代わり非自動はかりの場合はこの零点判定範囲を超えるような振動があれば容易に目視でばらつきを確認することができる。
非自動はかりの零点計測は、使用者が零点調整キーを押下することによって行われ、その押下のときに生成された重量測定値が零点重量値としてメモリに記憶される。ここで、重量測定装置は時間間隔tにて内部重量値を繰り返し生成しているものとする。重量測定装置は、記憶された零点重量値に対して上下限値±wu'を設定し、t毎に生成される内部重量値が記憶された零点重量値から±wu'の範囲r'内にあれば、その内部重量値は計量載せ台上に被計量物が存在しない状態で測定されたものとを判断する。以下、範囲r'を仮の零点計測範囲という。
図6は、計量載せ台上に載置された被計量物が降ろされた後、その計量載せ台上に新たな被計量物が載せられた場合の内部重量値の変化を示すグラフである。なお、図6において、Wztは時点tにおいて使用者が零点調整キーを押下したときに得られた零点重量値を、±wu'はその零点計測値Wztを中心にして設定された仮の零点計測範囲r'の上下限値をそれぞれ示している。
内部重量値が時間T毎にサンプリングされるものとすると、図6に示すとおり、内部重量値は振動するように変化する。ここで、順次サンプリングされる内部重量値のうち、Wzt±wu'の仮の零点計測範囲r'内に初めて入るものをW1とし、その後連続して零点計測範囲r'内にp個の内部重量値が入るとき、W1からWpの内部重量値を評価対象の内部重量値とし、その標準偏差を算出して許容値と比較する。ここで許容値以上である場合は警報を表示する。
その後、仮の零点計測が継続すれば新たにp個の内部重量値が記憶される毎に標準偏差を算出する。内部重量値の記憶個数がp個に到達するまでに被計量物が計量載せ台上に載置される等に起因して内部重量値が仮の零点計測範囲r'を超えれば、次の仮の零点計測が成立したときから新たにp個の内部重量値を記憶させて標準偏差を再計算させる。
[調整モード]
調整モードにて、重量測定装置が置かれた環境が正常である場合の内部重量値の標準的なばらつきを記憶させ、この値を基にして、内部重量値のばらつきが異常であるか否かを判定するための範囲を設定する。
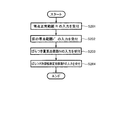
図7Aは、本発明の実施の形態1に係る計量装置であるトラックスケール1が備える重量測定装置2の調整モードにおける動作の流れの他の例を示すフローチャートである。
まず、重量測定装置2は、前記(A)で図2Bに示すフローチャートのように零点正常範囲Rの入力を受け付ける(S201)。
次に、重量測定装置2は、計量載せ台上に被計量物が載置されているか否かを判定するための仮の零点計測範囲r'の入力を使用者から受け付ける(S202)。
次に、重量測定装置2は、重量測定装置が置かれている環境が正常である場合の零点重量値のばらつきを表す標準偏差を算出するためのサンプル数Nの入力を使用者から受け付ける(S203)。ここで、高精度に零点重量値のばらつきの判定を行うために、Nは十分に大きい値に設定される。
さらに、重量測定装置2は、通常運転モードにおいて零点重量値をサンプリングし、零点重量値のばらつきを評価するために標準偏差を算出するのに必要なサンプリング数Pの入力を使用者から受け付ける(S204)。ここで、Pの値は、P<Nが成立するように設定される。
次に、前述したような重量測定装置が置かれた環境が正常である場合の内部重量値の標準的なばらつきを表す基準標準偏差を求める手順を説明する。図7Bは、基準標準偏差を求める場合における、本発明の実施の形態1に係るトラックスケール1が備える重量測定装置2の動作の流れを示すフローチャートである。
なお、調整作業において、零点重量値は零点正常範囲R内に含まれることを使用者が予め確認して行うため、後述する調整モードの許容最大標準偏差を求める手順においては、零点重量値が零点正常範囲R内にあるか否かの判定を省略している。
重量測定装置2は、重量測定値であって、表示重量値よりも分解能の高い内部重量値をサンプリング時間間隔T毎に生成する(S201')。次に、その内部重量値が仮の零点計測範囲r'内に含まれるか否かを判定する(S202')。ここで、重量測定装置2は、内部重量値が仮の零点計測範囲r'内に含まれないと判定した場合(S202'でNO)には処理を終了し、含まれると判定した場合(S202'でYES)にはその内部重量値をメモリ回路7に記憶する(S203')。
重量測定装置2は、メモリ回路7に記憶された内部重量値がN個に到達するか否かを判定する(S204')。ここで、重量測定装置2は、メモリ回路7に記憶された内部重量値がN個に到達していないと判定した場合(S204'でNO)にはステップS201'に戻り、到達したと判定した場合(S203'でYES)にはそれらのN個の内部重量値を用いて基準標準偏差Ssを算出する(S205')。そして、重量測定装置2は、後述するようにして許容最大標準偏差k・Ssを設定する(S206')。
なお、本実施の形態では、仮の零点計測による内部重量値のばらつき量を示す指標として内部重量値の標準偏差を用いているが、この方法に限られるわけではなく、例えば、仮の零点計測範囲r'の中にこの範囲r'よりも狭い範囲±wu''を設け(wu''<wu')、一定個数Mの内部重量値を取得する毎に±wu''以内に含まれる内部重量値の数のMに対する比率と、+wu'から+wu''まで、または−wu''から−wu'までの範囲内に含まれる内部重量値の数のMに対する比率とを求め、それらの比率の大きさをを比較し、ある範囲に係る比率が一定以上であれば内部重量値のばらつき量が大きいと判定する等、統計的な種々の手法を用いることができる。
前述したように、計量装置において実際に使用者に利用される重量測定値は表示重量値である。通常、計量装置において、内部重量値は表示重量値よりも高い分解能でもって測定される。また、表示重量値は、ちらつき防止などのため、ばらつきが少なくなるように処理されていることが一般的である。
内部重量値のばらつき量が一定以上大きくなると表示重量値に影響が出るため、予め内部重量値のばらつき量と表示重量値のばらつき量とを比較し、内部重量値のばらつき量の限界を定めるための係数kの値を求めておく。そして、M個の内部重量値に係る標準偏差がk・Ss以上であれば、表示重量値にばらつきが生じるため計量装置では使用することができないものと考える。そこで、重量測定装置2は、このk・Ssを許容最大標準偏差に設定する。
[通常運転モード]
図8は、本発明の実施の形態1に係る計量装置であるトラックスケール1が備える重量測定装置2の通常運転モードにおける動作の流れの他の例を示すフローチャートである。
まず、重量測定装置2は、表示重量値より分解能が高い重量測定値である内部重量値を時間T毎に生成する(S211)。次に、この生成した内部重量値が零点正常範囲R内に含まれているか否かを判定する(S212)。ここで、内部重量値が零点正常範囲R内に含まれていないと判定した場合(S212でNO)、重量測定装置2は、零点が異常であることを示す零点異常警報を表示器6にて表示し(S220)、後述するステップS221に進む。一方、内部重量値が零点正常範囲R内に含まれていると判定した場合(S212でYES)、重量測定装置2は、その内部重量値が仮の零点計測範囲r'内に含まれるか否かを判定し(S213)、仮の零点計測範囲r'内に含まれていない場合(S213でNO)は後述するステップS221に進む。また、仮の零点計測範囲r'内に含まれている場合(S213でYES)、重量測定値である内部重量値は零点重量値であると判定し、その内部重量値をメモリ回路7に記憶させる(S214)。そして、重量測定装置2は、メモリ回路7に記憶されている内部重量値の個数を示すカウンタCpを1だけインクリメントする(S214)。
なお、メモリ回路7の所定の領域には、後に標準偏差を算出するために必要な個数の内部重量値を記憶するための記憶領域が確保されている。
次に、重量測定装置2は、メモリ回路7に記憶されている内部重量値の数が所定値pに達したか否かを判定し(S216)、達していないと判定した場合(S216でNO)、処理は終了する。一方、達したと判定した場合(S217でYES)、p個の内部重量値を用いて標準偏差Ssiを算出する(S217)。そして、重量測定装置2は、算出した標準偏差Ssiが予め設定記憶されている許容最大標準偏差k・Ss以上であるか否かを判定し(S218)、標準偏差Ssiが許容最大標準偏差k・Ss以上であると判定した場合(S218でYES)、振動信号が異常に大きいことを示す振動異常警報を表示器6に表示させる(S219)。一方、標準偏差Ssiが許容最大標準偏差k・Ssより小さいと判定した場合(S218でNO)、カウンタCpの値を0にセットすることによってリセットし(S221)、またメモリ回路7に記憶されている内部重量値の値をクリアする(S222)。
[異常発生の予告機能について]
前述したように、本実施の形態の計量装置では、通常運転モードにおいて算出された零点偏差量が零点正常範囲R内にあるか否かによって異常の発生の有無を判定している。ここで、この零点正常範囲Rを複数の領域に区分けして利用することによって、以下のように計量装置の異常発生の予告を行うようにすることが可能である。
図10は、複数の領域に区分けされた零点正常範囲Rを示す概念図である。図10に示すとおり、零点正常範囲Rは、零点基準値Wiを中心にして設定された上下限値±Wuにより規定されている。ここで、さらに、Wuよりも小さい値である零点基準値Wiを中心にして上下限値±Wu1(|Wu1|<|Wu|)を設定し、この上下限値±Wu1により規定される領域を領域Aとし、上下限値±Wuにより規定される領域であって、領域Aを除いたものを領域Bとする。また、説明の便宜上、零点正常範囲R外の領域を領域Cとする。
なお、以上で示した±Wuおよび±Wu1の値は重量測定装置2のメモリ回路7に記憶されている。
図9は、異常発生の予告機能を備えた本発明の実施の形態1に係るトラックスケール1が備える重量測定装置2の通常運転モードにおける動作の流れの他の例を示すフローチャートである。
なお、調整モードにおいては図2に示すフローチャートと同様にして零点基準値が記憶され、零点重量値の正常範囲Rを表す±Wuが設定される。また、同様に零点異常注意範囲を表す±Wu1が設定される。
通常運転モードにおいては図9に示すフローチャートにしたがって計量動作が実施される。まず、重流測定装置2は、重量測定値を生成し(S231)、使用者によって零点調整キーが押下されたか否かを判定する(S232)。ここで零点調整キーが押下されなかったと判定された場合(S232でNO)、処理を終了する。一方、零点調整キーが押下されたと判定した場合(S232でYES)、重量測定装置2は、ステップS231にて生成した重量測定値を零点重量値として扱い、その零点重量値と零点基準値Wiとの差である零点偏差量を算出する(S233)。
次に、重量測定装置2は、ステップS233にて算出された零点偏差量が上述した領域Cに属するか否かを判定する(S234)。ここで、零点偏差量が領域Cに属すると判定した場合(S234でYES)、零点異常情報を表示器6に表示させる(S235)。一方、零点偏差量が領域Cに属さないと判定した場合(S234でNO)、重量測定装置2は、零点偏差量が領域Bに属するか否かを判定する(S236)。ここで、零点偏差量が領域Bに属さないと判定した場合(S236でNO)、処理を終了し、領域Bに属すると判定した場合(S236でYES)、近い将来に零点異常が発生する可能性があることを示す零点異常注意情報を表示器6に表示させる(S237)。
従来の重量測定装置の場合、領域Rのみが設けられ、零点重量値がその領域Rを超えたときに異常情報を出力していた。しかしながら、通常運転中に異常情報が出力されると作業を中断して修理を行う必要がある。そこで、上述したように、本発明の場合は、正常範囲内ではあるが、正常範囲の限界近くに所定の閾値を設けることによって新しい領域Bを設定しておき、零点重量値が異常ではないものの近い将来異常になる可能性の高い領域Bに属していると判定した場合には零点異常注意情報を出力することによって、使用者に対して修理点検のタイミングに余裕を与え、生産中断というリスクを回避することができる。また、異常が発生する前に、交換部品を用意しておく等の対応を行うことができる。
以上のように、本実施の形態では、図10における領域Aを正常レベル、領域Bを異常予知レベル、領域Cを異常レベルとしている。ここで、領域Bを細分化することによって、異常予知レベルを段階的に設けるようにしてもよい。
しかしながら、領域Bは正常であるとも異常であるとも言えない境界の領域であるため、複数の零点重量値に係る零点偏差量を用いて確率的な概念を導入することによって処理することが望ましい。
そこで、例えばM個の零点重量値に係る零点偏差量を用いて次のようなルールにしたがって、異常に至る状態をより確率的に判断し易くするように、異常判定を行うことが考えられる。
(1)M個の零点重量値に係る零点偏差量のうち、90%以上が領域A内にあり、残りが領域B内にある場合、正常レベルであると判定する。
(2)M個の零点重量値に係る零点偏差量のうち、10%以上50%未満が領域B内にあり、残りが領域A内にある場合、異常予知レベル1であると判定する。
(3)M個の零点重量値に係る零点偏差量のうち、50%以上が領域B内にあり、残りが領域A内にある場合、異常予知レベル2であると判定する。
(4)M個の零点重量値に係る零点偏差量のうち、90%以上が領域B内にあり、残りが領域A内にある場合、異常予知レベル3であると判定する。
(5)M個の零点重量値に係る零点偏差量のうち1個でも領域C内のものがある場合、異常レベルであると判定する。
ここで、複数の異常予知レベルのうち、異常予知レベル1は正常レベルに近いものであり、異常予知レベル3は異常レベルに近いものであるため、この判定されたレベルを示す情報を表示器6に表示させることによって、異常は発生してないとしても、異常に近づいているなどの傾向を使用者が容易に把握することができるようになる。
使用者は、異常予知レベル1乃至3に応じて、定期点検の予約をしたり、交換部品の用意をしたり、清算終了後の点検を行うなどの対処をとることができるため、突然の故障により計量装置を停止させるような事態を回避することができる。
なお、Mの値によって前述したようなある領域に属する零点偏差量と他の領域に属する零点偏差量との割合、および判定論理を変更するようにしてもよい。例えば、M=4の場合であれば、
(1)3個以上の零点計測値に係る零点偏差量が領域A内にあり、残りが領域B内にある場合、正常レベルであると判定する。
(2)2個以上の零点計測値に係る零点偏差量が領域B内にあり、残りが領域A内にある場合、異常予知レベルであると判定する。
(3)4個の零点計測値に係る零点偏差量のうち1個でも領域C内のものがある場合、異常レベルであると判定する。
(実施の形態2)
実施の形態2に係る計量装置は、複数の被計量物を同時に計量するために、複数の計量手段を備えるものである。このように複数の被計量物を同時に計量するために複数の計量手段を備える計量装置としては、回転式重量充填装置および回転式重量選別装置などがあるが、以下では回転式重量充填装置を例にして説明する。
図11は、本発明の実施の形態2に係る計量装置である回転式重量充填装置の構成を示す平面図である。図11に示すように、本発明の回転式重量充填装置101は、図示しない駆動源によって所定の一定速度で回転駆動される回転体102を備えている。この回転体102の円周方向には、容器14を載置するための複数の計量載せ台12,12…が配置されており、これら計量載せ台12,12…は回転体102とともに回転されるように構成されている。
また、回転体102の回転位置(計量載せ台12,12…の位置)を検出するために、回転体102の回転軸には位置検出手段11が設けられている。この位置検出手段11は、回転体012の1回転のスタートを示す位置でパルスを1個発信する原点用パルス発信器(図示せず)と、回転体102が1回転する間に複数個のパルスを発信する複数パルス発信器(図示せず)とを備えている。また、位置検出手段11は、制御装置10と通信可能に接続されており、原点用パルス発信器及び複数パルス発信器によって発信されたパルスを制御装置10に対して出力する。制御装置10は、原点用パルス発信器にてパルスが発信された時点から現時点までに複数パルス発信器にて発信されたパルス数に基づいて、回転体102の回転位置を検出する。
前述した複数の計量載せ台12,12…には、当該計量載せ台12,12…上に載置された容器14の重量を検出するためのロードセル13,13…がそれぞれ接続されている。また、これらの計量載せ台12,12…の上方には、当該計量載せ台12,12…上に載置された容器14に液体などの充填物を充填するための充填バルブ(図示せず)がそれぞれ設けられている。
計量載せ台12,12…には、搬送コンベヤ16によって搬送された未計量の容器14が、スターホイール15によって順次供給される。一方、後述するような計量処理が行われた後、計量載せ台上12,12…上にある計量済みの容器14はスターホイール17によって順次回収され、搬送コンベヤ18によって搬送される。なお、スターホイール15及び17と計量載せ台12,12…との間で正確に容器14の受け渡しを行うようにするために、回転体102,スターホイール15および17の回転は同期が取られる。
図12は、計量載せ台12,12…上に載置された容器14の重量を測定するための計量手段の構成を示すブロック図である。図12に示すように、計量手段103はCPU23を備えており、このCPU23は増幅器21及びA/D変換器22を介して前述したロードセル13と接続されている。また、CPU23は、入出力装置26を介して前述した充填バルブ27と接続されている。さらに、CPU23は、所定の記憶領域を有するメモリ24、及び制御装置10と通信するための通信インタフェース25と接続されている。
以上のように構成された計量手段103において、ロードセル13から出力されるアナログ計量信号は増幅器21によって増幅された後、A/D変換器22に供給される。そして、A/D変換器22にてアナログ計量信号がデジタル信号に変換され、その変換後のデジタル信号がCPU23に供給される。
CPU23は、メモリ24に記憶されているコンピュータプログラムにしたがって動作する。これにより、CPU23は、A/D変換器22から受けたデジタル信号を重量値に変換したり、重量値と予め設定された基準値とを比較し、その結果に応じて充填バルブ27の動作の制御を行う。
また、CPU23は、通信インタフェース25を介して、後述する零計測位置,風袋計測位置,小投位置,及びエンド位置を示す情報を制御装置10から受け取る。CPU23は、これらの情報により、ロードセル13と接続されている載せ台12の位置を知ることができ、その位置に応じて以下のような処理を実行することになる。
また、図示していないが、回転式重量充填装置101は、各種の情報を表示するための表示器を有している。
なお、計量手段103は、回転式重量充填装置101および回転式重量充填装置101が設置されている環境が正常な場合であって、計量載せ台12上に被計量物が載置されていないとき(計量載せ台に付着物がなく、しかも重量信号に振動信号が含まれていない等、零点重量値を正確に測定することができるとき)の重量測定値である零点重量値を予め複数回測定している。そして、計量手段103は、このようにして測定された複数の零点計測値の算術平均を求め、その結果得られた平均値を零点基準値としてメモリ24に記憶する。
[零点計測処理]
図11において、aは零点計測位置を示しており、この零点計測位置aから始まるT1は零点計測区間を示している。計量手段103が備えるCPU23は、制御装置10から出力された信号に基づいて、計量載せ台12が零点計測位置aに到達したと判定した場合、その計量載せ台12上には容器14が載っていないものと判断し、零点計測処理を開始する。
CPU23は、計量載せ台12が零点計測区間T1にある間、後述するような処理を実行することによって、零点重量値の異常を検出する。
なお、零点重量値が異常であると判定された場合、制御装置10は、その零点重量値を測定した計量手段3に係る充填バルブ27からは充填が行われないようにその動作を制御する。
[風袋計測処理]
図11において、bは風袋計測位置を示しており、この風袋計測位置bから始まるT2は風袋計測区間を示している。計量手段103が備えるCPU23は、制御装置10から出力された信号に基づいて、計量載せ台12が風袋測位置bに到達したと判定した場合、その計量載せ台12上に容器14が載ったものと判断し、風袋計測処理を開始する。
CPU23は、計量載せ台12が風袋計測区間T2にある間、ロードセル13からの出力信号に基づいて複数回重量値を演算し、その平均値を算出する。そして、CPU23は、その算出された平均値から零点を差し引いた値を風袋値としてメモリ24に記憶させる。
なお、計量載せ台12上に容器が載せられているか否かを判断するための容器有無設定値を予め用意しておき、その容器有無設定値とメモリ24に記憶されている風袋値とを比較することによって、容器が載せられているか否かを判断することができる。
[充填処理]
図11において、T3は充填物の予備小投を行う予備小投区間を、T4は充填物の大投入を行う大投入区間を、T5は小投位置待ち区間をそれぞれ示している。また、cは小投位置を示しており、この小投位置cから始まるT6は充填物の小投入を行う小投入区間を示している。
計量手段103が備えるCPU23は、ロードセル13からの出力信号に基づいて、容器14の重量値を繰り返し演算する。そして、その重量値が所定値に達した場合に、予備小投、大投入、小投位置待ち、小投、及び全閉の順に、充填バルブ27の動作を制御する。
[安定待ち処理]
図11において、T7は計量手段3を安定させるための安定待ち区間を、T8は容器14の重量を計測するための安定計測区間をそれぞれ示している。
計量手段103が備えるCPU23は、前述したように充填バルブ27を全閉とした後、安定待ち区間T7にいる間(所定の安定待ち時間の間)、計量手段3を安定させるために待機する。そして、この安定待ち時間が経過したとき、すなわち安定待ち区間T7が終了したとき、計量手段3は安定計測区間T8に入る。
安定計測区間T8において、CPU23はロードセル13からの出力信号に基づいて複数回重量値を演算し、その平均値を算出する。そして、CPU23は、その算出された平均値から零点及び風袋値を差し引いた値を容器14の重量値としてメモリ24に記憶させる。ここで、容器14の重量値が、所定の許容範囲の上限以上又は下限以下であると判定した場合、CPU23はその充填済みの容器14には過不足があると判断し、その容器14を不良側に排出するように所定の処理を実行する。
[エンド位置]
図11において、dはエンド位置を示している。計量手段103が備えるCPU23は、制御装置10から出力された信号に基づいて、計量載せ台12がエンド位置dに到達したと判定した場合、仮にその計量載せ台12上の容器14に対して充填バルブ27による充填処理が施されていたとしても、充填バルブ27の充填動作を終了させる。
このエンド位置dを超えた後、計量載せ台12上に載置された容器14は、スターホイール17によって回収され、搬送コンベヤ18によって搬送される。
次に、実施の形態1の場合と同様に、(A)前回の計量と今回の計量との間隔が比較的長いために、今回の計量動作が前回の計量動作の影響を受けない場合、および(B)前回の計量と今回の計量との間隔が比較的短いために、今回の計量動作が前回の計量動作の影響を受ける場合それぞれについて、調整モードおよび通常運転モードにおける回転式重量充填装置101の動作を説明する。
なお、以下では、図11に示すように、回転式重量充填装置101が36個の計量手段103を有していることとして説明するが、これは例示であって、計量手段103の数は複数であればいくつであっても構わない。
(A)零点重量値が異常に大きく変動する現象を未だ変動量が小さい時点で判定する場合の処理
[調整モード]
図13A〜図13Cは本発明の実施の形態2に係る計量装置である回転式重量充填装置101の調整モードにおける動作の流れを示すフローチャートである。
まず、図13Aに示すフローチャートが実行される前に、回転式重量充填装置101は、各計量手段103それぞれは、回転式重量充填装置101が正常に動作し、設置されている環境も正常である状態において、計量載せ台12上に被計量物が載置されていないときの重量測定値である零点重量値を取得し、その零点重量値に基づいて各計量手段103の零点基準値Wiを前述した場合と同様にして求めてメモリ24に記憶する。
回転式重量充填装置101は、一定の時間間隔で重量測定値を連続的に計量手段103に生成させる(S301)。そして、回転式重量充填装置101は、計量手段103が零点計測過程のタイミングにあるか否か、すなわち計量手段103が図11に示す零点計測位置aから始まる零点計測区間T1にあるか否かを判定し(S302)、零点計測過程のタイミングにはないと判定した場合(S302でNO)、処理を終了する。一方、計量手段103が零点計測過程のタイミングにあると判定した場合(S302でYES)、このタイミングで生成された重量測定値を零点重量値としてメモリ24が有するメモリD(図示せず)に加算する(S303)。そして、回転式重量充填装置101は、メモリ24が有するカウンタC1を1だけインクリメントする(S304)。
次に、回転式重量充填装置101は、カウンタC1の値が所定の回数qに到達したか否かを判定し(S305)、到達していない場合(S305でNO)は処理を終了する。一方、到達している場合(S305でYES)、回転式重量充填装置101は、メモリDの加算結果をカウンタC1の値で除することにより平均零点重量値を求め、この値を表示器等に出力する(S306)。その後、回転式重量充填装置101は、メモリDおよびカウンタC1の値をクリアする(S307)。
回転式重量充填装置101のような自動はかりの場合、零点計測区間T1を十分長く確保することができないので、安定した零点重量値を出力するために、上述したようにして平均値を求めている。
各計量手段103の零点基準値を回転式重量充填装置101に記憶させたい場合、使用者は、基準零点記憶キーを押下する。図13Bに示すように、回転式重量充填装置101は、使用者によって基準零点記憶キーが押下されたことを検出した場合(S301')、その押下されたタイミングで出力されている各計量手段103の零点基準値をメモリ24に記憶する(S302')。
図13Cに示すように、回転式重量充填装置101は、各計量手段103に対して、零点基準値Wi±Wu(所定値)である零点重量値の正常範囲Rを設定し(S301'')、また零点変動量±wu(所定値)である零点変動量の正常範囲rを設定する(S302'')。
以上のようにして、各計量手段103それぞれについて、零点基準値Wi1〜Wi36、零点重量値の正常範囲R、零点変動量の正常範囲rが求められ、これらの値がメモリ24に記憶される。
なお、Wuの値としては、回転式重量充填装置101の零点重量値が長期的に変動した場合において回転式重量充填装置101が正常に動作する変動量の限界値が用いられる。また、回転式重量充填装置101は1回転毎に充填に先立って被計量物の計量における零調整に相当する風袋計測による風袋引きが行われる。そこで、wuの値としては、充填精度の観点から、回転式重量充填装置101が1回の回転の間に許容可能な零点変動量が用いられる。
[通常運転モード]
本発明においては、零点重量値として安定な値を得るため、C2個の移動平均値を求める。そのために、計量手段103のメモリ24の中に移動平均個数である所定のC2に相当する個数の零点重量値を記憶するためのエリア(以下、零点重量値記憶用エリアという)を予め確保しておく。
図14は、本発明の実施の形態2に係る計量装置である回転式重量充填装置101の通常運転モードにおける動作の流れを示すフローチャートである。
回転式重量充填装置101は、一定の時間間隔で重量測定値を連続的に計量手段103に生成させる(S311)。そして、計量手段103が零点計測のタイミングにあるか否か、すなわち計量手段103が図11に示す零点計測位置aから始まる零点計測区間T1にあるか否かを判定し(S312)、零点計測のタイミングにはないと判定した場合(S312でNO)、処理を終了する。一方、計量手段103が零点計測のタイミングにあると判定した場合(S312でYES)、零点重量値記憶用エリアに最も以前に記憶されている値を削除するとともに前記タイミングで生成された重量測定値を零点重量値として零点重量値記憶用エリアに記憶し、既に零点重量値記憶用エリアに記憶されている零点重量値と併せてC2個の零点重量値の平均値を求める(S313)。
次に、回転式重量充填装置101は、ステップS313にて求められた平均値(平均零点重量値)が正常範囲R以内であるか否かを判定する(S314)。ここで、平均零点重量値が正常範囲R以内ではないと判定した場合(S314でNO)、回転式重量充填装置101は、零点異常警報を表示器に表示する(S315)。一方、平均零点重量値が正常範囲R以内であると判定した場合(S314でYES)、回転式重量充填装置101は、今回の平均零点重量値から前回の平均零点重量値を減ずることによって零点変動量wzeを求め(S316)、その零点変動量wzeが正常範囲r内にあるか否かを判定する(S317)。
ステップS317にて零点変動量wzeが正常範囲r内にあると判定した場合(S317でNO)、回転式重量充填装置101は、今回の平均零点重量値を次回の零点計測におけるステップS316の実行時に前回の平均零点重量値として用いるためにメモリ24に記憶する(S319)。一方、零点変動量wzeが正常範囲r内にないと判定した場合(S317でYES)、回転式重量充填装置101は零点変動量異常警報を表示器に表示し(S318)、前述したステップS319を実行する。
なお、回転式重量充填装置101が、各計量手段103の一回転の時間Tzを測定する手段を設け、その手段により通常運転モードにおいて零点計測から次の零点計測までの時間Tzを測定し、零点変動量|wze|を零点計測間隔時間Tzで除することにより零点時間変化率|wze|/Tzを導き、通常運転モードにて零点調整が行われる都度、時間測定値と零点変動量とから|wze|/Tzを算出し、その算出した値と予め調整モードにて正常な零点変動量の許容最大値|wu|の代わりに設定された零点変動量の許容限界時間変化率Azとの大小比較を行うにしてもよい。
(B)零点重量値によって異常な大きさの振動信号の存在を判定する処理
回転式重量充填装置101の場合、図11に示す零点計測位置aに計量載せ台103があるときにその計量載せ台103上に被計量物が載置されていないことを認識することができるため、零点計測位置aにいる時点から零点計測区間T1を過ぎる時点の重量測定値は零点計測によるものとし、この重量測定値を零点重量値とする。したがって、非自動はかりの場合のように、零点重量値を得るために仮の零点計測範囲r'を設ける必要はない。
しかし、回転式重量充填装置101において床振動の影響を検知しその大きさを判定する場合に、その判定を重量測定値によって行うこととすると、毎回被計量物の重量が異なり、しかも被計量物の重量測定時間が短いために、特定の被計量物に対して多くの重量測定値を得ることができないといった不都合が生じる。したがって、零点重量値を使用することが望ましく、しかも零点重量値の場合も零点計測が可能な時間は短いため、複数回の零点計測によって得られる零点重量値を使用することが望ましい。
[調整モード]
以下の処理は回転式重量充填装置101がおよび回転式重量充填装置101が設置されている環境が正常な状態であることが確認された上で行われる。
図15A、図15B、および図15Cは、本発明の実施の形態2に係る計量装置である回転式重量充填装置101の調整モードにおける動作の流れの他の例を示すフローチャートである。
まず、回転式重量充填装置101は、計量手段103の零点基準値を中心に±Wuの幅を持たせた零点重量値の正常範囲Rを設定する(S401)。次に、回転式重量充填装置101および回転式重量充填装置101が設置されている環境が正常である場合の零点重量値のばらつきを表す標準偏差(以下、基準標準偏差という)を算出するためのサンプル数Nを設定する(S402)。ここでNは十分安定した標準偏差を得るために十分に大きな値(例えば20等)に設定される。
回転式重量充填装置101は、通常運転モードにおいて零点重量値をサンプリングし、基準標準偏差を算出するために必要なサンプリング数Mを設定する(S403)。このMも上述したNと同数に設定される。
以上の設定は、36個の計量手段103のそれぞれに対して行われる。以下では、各計量手段103の零点重量値の正常範囲Rを区別するため、零点重量値の正常範囲R1〜R36と表す。
次に、回転式重量充填装置101は、通常運転モードの場合と同様に回転体102を回転させ、各計量手段103の基準標準偏差Ss1〜Ss36を求め、これらの基準標準偏差Ss1〜Ss36の平均値である平均基準標準偏差Ssaおよびこの平均標準偏差Ssaから許容最大標準偏差k・Ssaを求める。ここで、kは零点重量値のばらつき量の限界を定めるための定数である。
以下、図15Bおよび図15Cのフローチャートを参照して回転式重量充填装置101の動作を説明する。なお、これらのフローチャートではある1台の計量手段103に対する処理のみを示しているが、実際にはすべての計量手段103に対して同じ処理が並列に行われる。また、調査作業において、零点重量値は零点基準値に対して正常な範囲Rに含まれることを使用者が予め確認して行うため、後述する調整モードの許容最大標準偏差を求める過程では、零点重量値が正常範囲Rに含まれるか否かの判定は省略されている。
回転式重量充填装置101は、重量測定値であり、表示重量値よりも分解能が高い内部重量値をサンプリング時間間隔T毎に生成する(S401')。次に、回転式重量充填装置101は、計量手段103が零点計測区間T1にあるか否かを判定し(S402')、零点計測区間T1にはないと判定した場合(S402'でNO)、処理を終了する。一方、計量手段103が零点計測区間T1にあると判定した場合(S402'でYES)、回転式重量充填装置101は、その計量手段103の内部重量値を零点重量値としてメモリに記憶させる(S403')。
回転式重量充填装置101は、記憶された内部重量値の個数が所定のN個に到達したか否かを判定し(S404')、N個に到達していないと判定した場合(S404'でNO)、ステップS401'に戻る。一方、N個に到達したと判定した場合(S404'でYES)、回転式重量充填装置101は、N個の内部重量値を用いて基準標準偏差Ssを算出する(S405')。
以上の処理がすべての計量手段103について並列に行われた結果、基準標準偏差Ss1〜Ss36が求められる。次に、図15Cのフローチャートに移る。
回転式重量充填装置101は、全ての計量手段103において基準標準偏差Ssの算出が完了したか否かを判定し(S401'')、完了していないと判定した場合(S401''でNO)、処理を終了する。一方、全ての計量手段103において基準標準偏差Ssの算出が完了したと判定した場合(S401''でYES)、基準標準偏差Ss1〜Ss36の平均値である平均基準標準偏差Ssaを以下の式2にしたがって求める(S402'')。
Ssa=(Ss1+Ss2+…+Ss36)/36 …式2
次に、回転式重量充填装置101は、実施の形態1の場合と同様に、平基準基準標準偏差Ssaに予め用意した零点重量値のばらつき量の限界を定めるための定数kを乗じることにより、許容最大標準偏差k・Ssaを求める(S403'')。
[通常運転モード]
図16は、本発明の実施の形態2に係る計量装置である回転式重量充填装置101の通常運転モードにおける動作の流れの他の例を示すフローチャートである。
まず、回転式重量充填装置101は、各計量手段103において、重量測定値であり、表示重量値より分解能が高い内部重量値をサンプリング時間間隔T毎に生成する(S411)。次に、回転式重量充填装置101は、計量手段103が零点計測区間T1にあるか否かを判定し(S412)、零点計測区間T1にはないと判定した場合(S412でNO)、処理を終了する。一方、計量手段103が零点計測区間T1にあると判定した場合(S412でYES)、回転式重量充填装置101は、各計量手段103の零点重量値が正常範囲R1〜R36内に含まれるか否かを判定する(S413)。ここで、いずれかの零点重量値が正常範囲Rの範囲内にないと判定した場合(S413でNO)、回転式重量充填装置101は、正常範囲Rの範囲内にないと判定された零点重量値に係る計量手段103に零点異常が発生していることを示す零点異常情報を表示器に表示する(S419)。
一方、ステップS413おいて、すべての零点計測量が零点正常範囲R1〜R36内にあると判定された場合(S413でYES)、回転式重量充填装置101は、ステップS411にて測定された零点重量値のすべてをそれぞれの計量手段103のメモリ34に記憶させる(S414)。
回転式重量充填装置101は、各計量手段103について、有効な零点重量値がそれぞれM個得られたか否かを調整モードの場合と同様にして判定する(S415)。ここで、少なくとも1つの計量手段103について有効な零点計測値がM個得られていないと判定された場合(S415でNO)、回転式重量充填装置101は、ステップS412に戻って以降の処理を繰り返す。一方、各計量手段103すべてについて有効な零点計測値がM個得られたと判定された場合(S415でYES)、回転式重量充填装置101は、各計量手段103について、M個の有効な零点重量値のばらつき量を示す指標として標準偏差Ssi1〜Ssi36を算出する(S416)。
次に、回転式重量充填装置101は、ステップS416にて算出された標準偏差Ssi1〜Ssi36の平均値Ssgaを算出し(S417)、後述する異常判定処理を実行する(S418)。
回転式重量充填装置101は、ステップS418の異常判定処理後、各計量手段103のメモリ24に記憶されている零点重量値をクリアさせる(S4110)。これにより次回の判定処理の際の零点重量値のサンプリングに備える。
以上のように、後述する異常判定処理は、各計量手段103が正常範囲R内にあるM個の零点重量値を生成する都度繰り返し実行される。
図17及び図18は、本発明の実施の形態2に係る計量装置である回転式重量充填装置101の通常運転モードにおける異常判定処理の流れを示すフローチャートである。
回転式重量充填装置101は、ステップS417にて算出された平均標準偏差Ssgaが調整モードにおいて算出された許容最大標準偏差k・Ssaよりも小さいか否かを判定する(S501)。
ところで、多くの同型式の計量手段で構成されている1台の計量装置の場合、これらの計量手段のすべてが同時に異常状態となって振動信号を発生させる確率は極めて小さく、通常であればこれらの計量手段のうちの少数のもののみが同時に異常状態となる。そのため、標準偏差Ssgaの値は、各計量手段に共通の要因(例えば、電気ノイズ、床振動、風、気温の急変などの環境条件)による振動信号によって発生したばらつきの標準偏差に等しいとみなすことができる。
以上より、本実施の形態では、Ssga<k・Ssaが成立する場合、各計量手段103に共通の要因による振動信号は許容範囲を超えていないものと考えることができる。一方、Ssga<k・Ssaが成立しない場合、各計量手段103に共通の要因による振動信号は許容範囲を超えているものと考えることができる。
また、各計量手段103に共通の要因による振動信号は許容範囲を超えていないとしても、各計量手段103に特有の要因による振動信号が許容範囲を超えている場合があり得る。そのため、各計量手段103に係る標準偏差Ssi1〜Ssi36のうち許容最大標準偏差k・Ssaと同じかまたは超えているものがある場合は、その同じかまたは超えている標準偏差に係る計量手段103に特有の要因による振動信号が許容範囲を超えているものと考えることができる。一方、すべての標準偏差Ssi1〜Ssi36が許容最大標準偏差k・Ssaよりも小さい場合は、各計量手段103に特有の要因による振動信号が許容範囲を超えていないものと考えることができる。
そこで、ステップS501において、標準偏差Ssgaが許容最大標準偏差k・Ssa以上であると判定した場合(S501でNO)、回転式重量充填装置101は、各計量手段103に共通の要因による振動信号は許容範囲を超えていると判断し、後述するステップS601に進む。一方、標準偏差Ssgaが許容最大標準偏差k・Ssaより小さいと判定された場合(S501でYES)、各計量手段103に共通の要因による振動信号は許容範囲を超えていないと判断し、回転式重量充填装置101は、各標準偏差Ssi1〜Ssi36がそれぞれ許容最大標準偏差k・Ssa以上であるか否かを判定する(S502)。ここで、各標準偏差Ssi1〜Ssi36のすべてが許容最大標準偏差k・Ssaよりも小さいと判定された場合(S502でNO)、回転式重量充填装置101は、各計量手段103に特有の要因による振動信号は許容範囲を超えていないために零点計測値は正常であると判断し、回転式重量充填装置101に関する異常は発生していないことを示す零点正常情報を図示しない表示器に表示する(S503)。
一方、ステップS502において、標準偏差Ssi1〜Ssi36のうち少なくとも1つが許容最大標準偏差k・Ssa以上であると判定された場合(S502でYES)、回転式重量充填装置101は、後述する標準偏差Ssm(mは1の計量手段を特定するための識別子であり、ここでは許容最大標準偏差k・Ssa以上であると判定された標準偏差に係る計量手段を特定している。)を以下のようにして算出する(S504)。
例えば、計量手段mにおいてSsim≧k・Ssaが成立している場合、前述したように、「計量手段mに異常が発生しており、その異常は計量手段mに特有な要因による振動信号が関与している」と考えられる。そこで、この場合は計量手段mの異常の内容についてさらに調べる必要がある。
計量手段mに特有な要因による振動信号によって生じた零点偏差量のばらつきの標準偏差をSsmとし、各計量手段103に共通の要因による振動信号によって生じた計量手段mにおける零点偏差量のばらつきの標準偏差をSsmgとする。ここで、各計量手段103は同一条件で影響を受けているので、標準偏差Ssmgはすべての計量手段103に共通の要因により生じた零点偏差量のばらつきの平均値Ssgaにほぼ等しいと考えることができる。したがって、以下の式3が成立する。
Ssim2=Ssm2+Ssmg2≒Ssm2+Ssga2 …式3
この式3から導かれる以下の式4にしたがって、回転式重量充填装置101は、標準偏差Ssmを算出する(S504)。
Ssm=(Ssim2−Ssga2)1/2 …式4
次に、回転式重量充填装置101は、ステップS504にて算出された標準偏差Ssmが許容最大標準偏差k・Ssa以上であるか否かを判定する(S505)。ここで、標準偏差Ssmが許容最大標準偏差k・Ssa以上であると判定された場合(S505でYES)、回転式重量充填装置101は、計量手段mに特有な要因により生じた振動信号により当該計量手段mが異常状態になっていることを示す第1零点異常情報を、図示しない表示器に表示する(S506)。
一方、ステップS505において、標準偏差Ssmが許容最大標準偏差k・Ssaより小さいと判定された場合(S505でNO)、回転式重量充填装置101は、第2零点異常情報を図示しない表示器に表示する(S507)。ここで、第2零点異常情報は、計量手段mに特有な要因による振動信号および各計量手段103に共通の要因による振動信号の何れも単独では許容範囲を超えてはいないが、これら振動信号の合成が許容範囲を超えているため、計量手段mが異常状態になっていることを示す情報である。
なお、床振動などの各計量手段103に共通な要因による振動信号により生じた零点偏差量のばらつきの標準偏差Ss1g〜Ssngとし、計量手段mにのみ当該計量手段mに特有の要因による振動信号により生じた零点偏差量のばらつきの標準偏差Ssmが含まれていたとすると、各計量手段103における零点偏差量のばらつきの標準偏差Ssi1,Ssi2,…,Ssim,…,SsinはそれぞれSs1g,Ss2g,…,(Ssm2+Ssmg2)1/2,…,Ssngとなる。この場合、すべての計量手段103の標準偏差の平均値Ssgaは以下の式5により算出される。
Ssga
={Ss1g+Ss2g+…+(Ssm2+Ssmg2)1/2+…+Ssng}/n
…式5
ここで、各計量手段103は同型式であって同条件により周囲環境から影響を受けているので、各計量手段103に共通な要因による振動信号によって生じたばらつきの標準偏差は各計量手段103において等しいとみなすことができる。そこで、この値をSsgとすると、以下の式6が成り立つ。
Ssg=Ss1g≒Ss2g≒…≒Ssmg≒…≒Ssng …式6
また、計量手段の数が比較的多いため、1台の計量手段103にのみ存在する振動信号によって生じたばらつきの標準偏差Ssmについて以下の式7が成り立つ。
Ssm≪Ss1g+Ss2g+…+Ssng=n・Ssg …式7
したがって、すべての計量手段103の標準偏差の平均値Ssgaは以下の式8により算出される。
Ssga=n・Ssg/n=Ssg …式8
以上より、1台程度の計量手段103に特有な要因による振動信号を重量信号が含んでいたとしても、すべての計量手段103に係る標準偏差の平均値をとれば、すべての計量手段103に共通な要因による振動信号によって生じた零点偏差量のばらつきの標準偏差に等しくなる。ここで、nの値が大きくなる場合は複数の計量手段の重量信号に異常な振動信号が含まれる確率が高まってくるが、その一方でnが大きくなるのでSsga≒Ssgは成立する。
図17に示すフローチャートに戻り、ステップS501において、標準偏差Ssgaが許容最大標準偏差k・Ssa以上であると判定された場合(S501でNO)、回転式重量充填装置101は、(Ssi12−Ssga2)1/2〜(Ssi362−Ssga2)1/2が許容最大標準偏差k・Ssa以上であるか否かを判定する(S601)。ここで、(Ssi12−Ssga2)1/2〜(Ssi362−Ssga2)1/2のすべてが許容最大標準偏差k・Ssaよりも小さいと判定された場合(S601でNO)、回転式重量充填装置101は、各計量手段103に共通な要因による振動信号によってすべての計量手段103が異常状態にあることを示す第3零点異常情報を図示しない表示器に表示する(S602)。
一方、ステップS601において、(Ssi12−Ssga2)1/2〜(Ssi362−Ssga2)1/2のうち少なくとも1つが許容最大標準偏差k・Ssa以上であると判定された場合(S601でYES)、回転式重量充填装置101は、その許容最大標準偏差k・Ssa以上であると判定された標準偏差に係る計量手段103に特有な要因による振動信号および各計量手段103に共通な要因による振動信号の双方が許容範囲を超えているため、当該計量手段103が異常状態であることを示す第4零点異常情報を図示しない表示器に表示する(S603)。
以上のように、本実施の形態に係る計量装置では、各計量手段に共通な要因および特定の計量手段に特有な要因の双方の影響を受けているのか、何れか一方のみの影響を受けているのかなどが明りょうになるため、適切な対応策を講じることが可能になる。
なお、実施の形態2においても、実施の形態1の場合と同様に異常発生の予告機能を設けるようにしてもよい。