JP5021312B2 - 角速度センサ及びその製造方法 - Google Patents
角速度センサ及びその製造方法 Download PDFInfo
- Publication number
- JP5021312B2 JP5021312B2 JP2006536699A JP2006536699A JP5021312B2 JP 5021312 B2 JP5021312 B2 JP 5021312B2 JP 2006536699 A JP2006536699 A JP 2006536699A JP 2006536699 A JP2006536699 A JP 2006536699A JP 5021312 B2 JP5021312 B2 JP 5021312B2
- Authority
- JP
- Japan
- Prior art keywords
- frame
- sensor
- mass
- wafer
- etching
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5705—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using masses driven in reciprocating rotary motion about an axis
- G01C19/5712—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using masses driven in reciprocating rotary motion about an axis the devices involving a micromechanical structure
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5719—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using planar vibrating masses driven in a translation vibration along an axis
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/02—Details
- H03H9/02244—Details of microelectro-mechanical resonators
- H03H9/02338—Suspension means
- H03H2009/02346—Anchors for ring resonators
- H03H2009/02354—Anchors for ring resonators applied along the periphery, e.g. at nodal points of the ring
Description
本発明のさらにもう1つの目的は、低コストの密封包装を有する角速度センサを提供することにある。
本発明のさらにもう1つの目的は、質量行程距離を長くするために、質量に取り付けられているレバー・アームを有する捻れ力により装着され、静電的に駆動されるプレートの使用により、性能が改善され、コストの安い角速度センサを提供することにある。
機械的構成
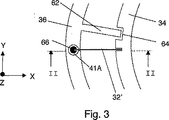
図1の実施形態の場合には、センター・プレート28が、捻れヒンジ28Aによりフレーム34に取り付けられていて、このヒンジによりセンター・プレート28は、図1のX軸を中心にして回転することができる。ヒンジ28Aは、また、その位置をX−Y面内の名目的な位置に戻そうとするプレート28上に復元トルクを提供することができる。プルーフ質量22は、ヒンジ58によりセンタ・プレート28に取り付けられ、プルーフ質量24は、ヒンジ56によりセンター・プレート28に取り付けられている。センター・プレート28、プルーフ質量22およびプルーフ質量24のサブアセンブリは、プルーフ質量22および24が必ずZ軸に沿って反対方向に移動するように一緒にリンク装置を形成している。
動作
図1および図2の実施形態は、2つの動作モードを有する。第1の好適な動作モードの場合には、質量22および24が振動し、Y方向の角速度を測定するためにフレーム34の運動が感知される。第2の動作モードの場合には、フレーム34が振動し、Y方向の角速度を測定するために質量22および24の運動が感知される。これら2つの方法を順番に考察する。
1)第2の動作モードは、フレーム34を角振動させるためのアクチュエータを含む。フレーム34およびベース36に連結されている静電アクチュエータは、フレーム34を角振動させるための1つの適している手段である。このような静電アクチュエータは、図5の構成を含む種々の電極構成を有することができる。
図2の電極48A、48B、50A、50B、52Aおよび52Bは、このような容量性センサを供給する。電極52Aおよび52B上のプレート26の運動は、電極52Aとプレート26との間のキャパシタンスを測定することにより、また電極52Bとプレート26との間のキャパシタンスを測定することにより感知される。プレート28および30の運動も同様に感知される。
製造
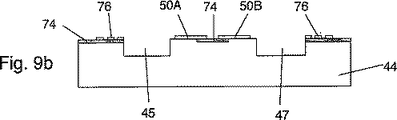
好ましい実施形態の場合には、上記の構造および動作を有する角回転センサ(またはジャイロスコープ)は、(MEMS技術とも呼ばれる)微細加工技術により製造される。2つのタイプのMEMS技術、すなわち、バルクMEMS技術および表面MEMS技術は周知である。バルクMEMS技術は、本発明にとって好適なものである。何故なら、バルクMEMSのプルーフ質量(すなわち、質量22および24)は、より大きな質量を有することができ、表面MEMSのプルーフ質量よりも広い範囲で運動することができるからである。図7a〜図7d、図8a〜図8d、図9a〜図9dおよび図10a、図10bは、本発明の実施形態を製造するのに適している例示としての製造シーケンスの略図である。
Claims (78)
- センサ面の角速度を測定するためのセンサであって、前記センサが、
a)感知サブアセンブリであって、
i)前記面に平行で平らなフレームと、
ii)前記面内に配置されている第1の質量と、
iii)前記第1の質量とともに前記面内に配置されている第2の質量と、
iv)前記フレーム内に位置し、前記フレームに連結されているリンク装置であって、前記リンク装置は、前記第1の質量および前記第2の質量に連結され、前記リンク装置は、前記第1および第2の質量が、前記面に垂直にそれぞれ反対方向に移動するのを許容するリンク装置とを備える感知サブアセンブリと、
b)前記リンク装置及び前記フレームの一方を駆動周波数で振動させるためのアクチュエータと、
c)前記角速度により前記リンク装置及び前記フレームの他方の運動を感知するためのトランスジューサとを備えるセンサ。 - 前記アクチュエータが、静電アクチュエータ、電磁アクチュエータ、圧電アクチュエータおよび熱アクチュエータからなるグループから選択される請求項1に記載のセンサ。
- 前記トランスジューサが、容量性センサ、電磁センサ、圧電センサ、およびピエゾ抵抗センサからなるグループから選択される請求項1に記載のセンサ。
- 前記フレームの運動が、前記センサ面に垂直な軸を中心とする回転に制約される請求項1に記載のセンサ。
- 前記フレームが円形である請求項4に記載のセンサ。
- 前記第1および第2の質量の運動が、前記フレームに対して前記センサ面に垂直な方向だけに許容される請求項1に記載のセンサ。
- 空気抵抗を低減するために、前記質量のうちの少なくとも一方に孔部をさらに有する請求項1に記載のセンサ。
- 前記リンク装置が、
前記フレームに連結され、また前記第1および第2の質量におよびその間に連結されたセンター・プレートであって、回転の中心軸を中心にして回転可能なセンター・プレートと、
前記フレームおよび前記第1の質量に連結された第1の縁部プレートであって、回転の第1の軸を中心にして回転可能な第1の縁部プレートと、
前記フレームおよび前記第2の質量に連結されている第2の縁部プレートであって、回転の第2の軸を中心にして回転可能な第2の縁部プレートとをさらに備え、
回転の前記中心軸、第1および第2の軸が相互に平行であり、また前記センサ面に平行である請求項1に記載のセンサ。 - 前記センター・プレートが、前記第1の質量に連結された第1のレバー・アームと、前記第2の質量に連結された第2のレバー・アームとをさらに備え、それにより前記センター・プレートの回転に応じた前記センサ面に垂直な前記質量の運動が増大する請求項8に記載のセンサ。
- 前記第1の縁部プレートが、前記第1の質量に連結されたレバー・アームをさらに備え、それにより前記第1の縁部プレートの回転に応じた前記センサ面に垂直な前記第1の質量の運動が増大する請求項8に記載のセンサ。
- 前記フレームが、前記センサ面に垂直な軸を中心にする前記フレームの角回転を有する基本フレーム共振モードを備えている請求項1に記載のセンサ。
- 前記リンク装置は、前記センサ面に垂直な方向に相互に180度位相がずれている前記第1および第2の質量の振動を有する基本リンク装置共振モードを備えている請求項1に記載のセンサ。
- 前記フレームが、前記センサ面に垂直な軸を中心にする前記フレームの角回転を有する基本フレーム共振モードを備えている請求項12に記載のセンサ。
- 前記フレームに平行で、その周囲に位置する平らなベースをさらに備える請求項1に記載のセンサ。
- 前記フレームが前記センサ面に垂直な軸を中心にして回転できるように、前記ベースを前記フレームに連結されている複数の撓み部分をさらに有する請求項14に記載のセンサ。
- 前記ベースに取り付けられている頂面を有するシリコン基準ウェハをさらに備え、前記感知サブアセンブリおよび前記ベースが、1つのシリコン・ジャイロスコープ・ウェハからエッチングされる請求項14に記載のセンサ。
- 前記基準ウェハが、前記センサ面に垂直な前記第1および第2の質量の運動を収容するように2つの凹部を備える請求項16に記載のセンサ。
- 前記基準ウェハが、前記感知サブアセンブリに電気的に連結されているCMOS電子回路を備える請求項16に記載のセンサ。
- 前記基準ウェハに対する前記リンク装置の運動を感知するための容量性センサをさらに備える請求項16に記載のセンサ。
- 前記リンク装置が、
前記フレームに連結され、また前記第1および第2の質量におよびその間に連結されたセンター・プレートであって、回転の中心軸を中心にして回転可能なセンター・プレートと、
前記フレームおよび前記第1の質量に連結されている第1の縁部プレートであって、回転の第1の軸を中心にして回転可能な第1の縁部プレートと、
前記フレームおよび前記第2の質量に連結されている第2の縁部プレートであって、回転の第2の軸を中心にして回転可能な第2の縁部プレートとをさらに備え、
回転の前記中心軸、第1および第2の軸が相互に平行であり、また前記センサ面に平行である請求項19に記載のセンサ。 - 前記アクチュエータが、
前記基準ウェハの前記頂面上の前記第1の縁部プレートの下に位置し、所定の距離dだけ前記第1の縁部プレートから離れている第1の縁部分割電極と、
前記基準ウェハの前記頂面上の前記第2の縁部プレートの下に位置し、前記距離dだけ前記第2の縁部プレートから離れている第2の縁部分割電極と、
前記基準ウェハの前記頂面上の前記センター・プレートの下に位置し、前記距離dだけ前記センター・プレートから離れているセンター分割電極とを備える請求項20に記載のセンサ。 - 前記第1の縁部電極、前記第2の縁部電極および前記センター分割電極が、前記センサ面に垂直な方向に相互に180度位相がずれた状態で、前記第1および第2の質量の振動を有する前記リンク装置の振動モードを励起するために、協力して電気的に駆動される請求項21に記載のセンサ。
- 前記駆動周波数が、前記振動モードの共振周波数に等しい請求項22に記載のセンサ。
- 前記トランスジューサが、前記ベースおよび前記フレームに連結された容量性センサを備え、前記基準ウェハが、前記容量性センサに連結され、また前記第1の縁部電極、前記第2の縁部電極、および前記センター分割電極に接続されたCMOS電子回路を備える請求項21に記載のセンサ。
- 前記フレームが前記センサ面に垂直な軸を中心にして回転できるように、前記フレームを前記基準ウェハに連結する複数の撓み部分をさらに有し、前記撓み部分が、前記ベースを貫通していて複数のベース分離トレンチにより前記ベースから分離していて、それにより前記ベースの応力が前記撓み部分に伝わらない請求項16に記載のセンサ。
- 前記撓み部分から前記基準ウェハの前記頂面を分離している複数の基準分離トレンチをさらに備え、それにより前記基準ウェハの前記頂面の表面応力が、前記撓み部分にほとんど伝わらない請求項25に記載のセンサ。
- 前記ベースに取り付けられている底面を有するシリコン・キャップ・ウェハをさらに備える請求項16に記載のセンサ。
- 前記キャップ・ウェハが、前記センサ面に垂直な前記第1および第2の質量の運動を収容するための凹部を有する請求項27に記載のセンサ。
- 前記キャップ・ウェハが、前記ベースに密封状に取り付けられ、前記基準ウェハが、前記ベースに密封状に取り付けられる請求項27に記載のセンサ。
- 前記ベース、前記キャップ・ウェハおよび前記基準ウェハが形成する密封エンクロージャ内のガスの圧力が、大気圧とは異なる請求項29に記載のセンサ。
- 前記キャップ・ウェハが、Si−SiO2溶融接合により前記ベースに密封状に取り付けられ、前記基準ウェハが、金属シールにより前記ベースに密封状に取り付けられる請求項29に記載のセンサ。
- 前記フレームが、前記センサ面に垂直な軸を中心にして回転することができるように、前記フレームを前記キャップ・ウェハに連結されている複数の撓み部分をさらに有し、前記撓み部分が前記ベースを貫通し、複数のベース分離トレンチにより前記ベースから分離していて、それにより前記ベースの応力が、前記撓み部分に伝わらない請求項27に記載のセンサ。
- 前記撓み部分から前記キャップ・ウェハの前記底面を分離している複数のキャップ分離トレンチをさらに有し、それにより前記キャップ・ウェハの前記底面の表面応力が前記撓み部分に伝わらない請求項32に記載のセンサ。
- 前記撓み部分が前記基準ウェハに連結されている請求項33に記載のセンサ。
- 前記撓み部分から前記基準ウェハの前記頂面を分離している複数の基準分離トレンチをさらに備え、それにより前記基準ウェハの前記頂面の表面応力が前記撓み部分に伝わらない請求項34に記載のセンサ。
- X−Yセンサ面の角速度のXおよびY成分を測定するための二軸センサであって、前記二軸センサが、
A)角速度のX成分を測定するための第1のサブセンサを備え、前記第1のサブセンサが、
a)第1の感知サブアセンブリであって、
i)前記面に平行で平らな第1のフレームと、
ii)前記面内に配置される第1の質量と、
iii)前記第1の質量とともに前記面内に配置される第2の質量と、
iv)前記フレーム内に位置し、前記フレームに連結された第1のリンク装置であって、前記第1の質量および前記第2の質量に連結され、前記第1および第2の質量がそれぞれ前記面に垂直な反対方向に移動するのを許容する第1のリンク装置とを備える第1の感知サブアセンブリと、
b)駆動周波数で前記第1のリンク装置及び前記第1のフレームの一方を振動するための第1のアクチュエータと、
c)角速度のX成分による前記第1のリンク装置及び前記第1のフレームの他方の運動を感知するための第1のトランスジューサとを備え、さらに、
B)角速度のY成分を測定するための第2のサブセンサを備え、前記第2のサブセンサが、
a)第2の感知サブアセンブリであって、
i)前記面に平行で平らな第2のフレームと、
ii)前記面内に配置される第3の質量と、
iii)前記第3の質量とともに前記面内に配置される第4の質量と、
iv)前記第2のフレーム内に位置し、前記第2のフレームに連結された第2のリンク装置であって、前記第3の質量および前記第4の質量に連結され、前記第3および第4の質量が前記面に垂直な反対方向に移動するのを許容する第2のリンク装置とを備える第2の感知サブアセンブリと、
b)駆動周波数で前記第2のリンク装置及び前記第2のフレームの一方を振動するための第2のアクチュエータと、
c)角速度のY成分による前記第2のリンク装置及び前記第2のフレームの他方の運動を感知するための第2のトランスジューサとを備えるセンサ。 - センサ面の角速度を測定するためのセンサであって、前記センサが、
a)第1の感知サブアセンブリであって、
i)前記面に平行で平らな第1のフレームと、
ii)前記面内に配置される第1の質量と、
iii)前記第1の質量とともに前記面内に配置される第2の質量と、
iv)前記フレーム内に位置し、前記フレームに連結された第1のリンク装置であって、前記第1の質量および前記第2の質量に連結され、前記第1および第2の質量がそれぞれ前記面に垂直な反対方向に移動するのを許容する第1のリンク装置とを備える第1の感知サブアセンブリと、
b)駆動周波数で前記第1のリンク装置及び前記第1のフレームの一方を振動するための第1のアクチュエータと、
c)前記角速度に応じた前記第1のリンク装置及び前記第1のフレームの他方の第1の運動を感知するための第1のトランスジューサと、
d)第2の感知サブアセンブリであって、
i)前記面に平行で平らな第2のフレームと、
ii)前記面内に配置される第3の質量と、
iii)前記第3の質量とともに前記面内に配置される第4の質量と、
iv)前記第2のフレーム内に位置し、前記第2のフレームに連結された第2のリンク装置であって、前記第3の質量および前記第4の質量に連結され、前記第3および第4の質量がそれぞれ前記面に垂直な反対方向に移動するのを許容し、前記第1のリンク装置と同じ構成および向きを有していて、前記第3の質量が前記第1の質量に対応し、前記第4の質量が前記第2の質量に対応する第2のリンク装置とを備える第2の感知サブアセンブリと、
e)駆動周波数で前記第2のリンク装置及び前記第2のフレームの一方を振動するための第2のアクチュエータと、
f)前記角速度に応じた前記第2のリンク装置及び前記第2のフレームの他方の第2の運動を感知するための第2のトランスジューサとを備え、
前記第1および第2のトランスジューサからの信号が、前記角速度に応じた前記第1および第2の運動を、前記角速度によらない運動から区別するために結合されるセンサ。 - 前記第1の質量および前記第3の質量がそれぞれ前記面に垂直な反対方向に移動するように、前記第1および第2のリンク装置が駆動される請求項37に記載のセンサ。
- 前記第1および第2のフレームが前記面内で回転することができ、前記第1のフレームを前記第2のフレームに対して連結するフレーム・リンク装置をさらに備え、前記第1および第2のフレームは前記フレーム・リンク装置により、反対方向への回転が許容される請求項38に記載のセンサ。
- 感知面の角速度を測定するためのセンサを製造するための方法であって、前記方法が、
a)ジャイロスコープ・ウェハから感知サブアセンブリをエッチングするステップであって、前記サブアセンブリが、
i)前記面に平行で平らなフレームと、
ii)前記フレームに連結されたリンク装置であって、前記面内に配置され、前記面に垂直な反対方向へのそれぞれの移動が許容された第1の質量および第2の質量を備えたリンク装置とを備えるステップと、
b)駆動周波数で前記リンク装置及び前記フレームの一方を振動するためのアクチュエータを提供するステップと、
c)前記角速度に応じた前記リンク装置及び前記フレームの他方の運動を感知するためのトランスジューサを提供するステップとを含む方法。 - アクチュエータを提供する前記ステップが、静電アクチュエータ、電磁アクチュエータ、圧電アクチュエータおよび熱アクチュエータからなるグループから選択されるアクチュエータを提供するステップを含む請求項40に記載の方法。
- トランスジューサを提供する前記ステップが、容量性センサ、電磁センサ、圧電センサ、およびピエゾ抵抗センサからなるグループから選択されるトランスジューサを提供するステップを含む請求項40に記載の方法。
- 感知サブアセンブリをエッチングする前記ステップが、空気抵抗を低減するために、前記質量のうちの少なくとも一方に孔部をエッチングするステップをさらに含む請求項40に記載の方法。
- 感知サブアセンブリをエッチングする前記ステップが、高アスペクト比エッチングを含む請求項40に記載の方法。
- 前記高アスペクト比エッチングが、深反応性イオン・エッチングを含む請求項44に記載の方法。
- 感知サブアセンブリをエッチングする前記ステップの前に、前記ジャイロスコープ・ウェハを薄くするステップをさらに含む請求項40に記載の方法。
- 前記薄くするステップが、研磨ステップを含む請求項46に記載の方法。
- 前記薄くするステップが、40ミクロンの厚さを有するジャイロスコープ・ウェハを提供するステップを含む請求項46に記載の方法。
- 前記薄くするステップが、前記ジャイロスコープ・ウェハを少なくとも2つの異なる厚さに選択的に薄くして、その結果前記エッチングにより形成される前記質量が前記2つの異なる厚さの厚い方を有するステップを含む請求項46に記載の方法。
- 前記エッチングの前に、前記サブアセンブリを形成するために前記ジャイロスコープ・ウェハをフォトリソグラフィによりパターン形成するステップをさらに含む請求項40に記載の方法。
- 前記ジャイロスコープ・ウェハから平らなベースをエッチングするステップであって、前記ベースが前記フレームに平行でありその周囲に位置するステップと、
基準ウェハの頂面に前記ベースを基準接合するステップとをさらに含み、
アクチュエータを提供する前記ステップが、前記基準ウェハの前記頂面上に複数の電極を堆積するステップを含み、
トランスジューサを提供する前記ステップが、前記フレームに連結されているフレーム電極を堆積するステップと、前記ベースに連結されているベース電極を堆積するステップとを含み、前記フレームおよびベース電極が容量性センサを備える請求項40に記載の方法。 - 前記基準接合が、アルミニウム−ゲルマニウム接合、半田接合、インジウム−金接合、共融合金接合およびポリマー結合からなるグループから選択される請求項51に記載の方法。
- 前記基準ウェハ内にCMOS回路を形成するステップをさらに含む請求項51に記載の方法。
- 前記複数の電極に前記回路を接続するステップと、前記容量性センサに前記回路を接続するステップとをさらに含む請求項53に記載の方法。
- 前記回路に連結され、前記基準ウェハに対する前記リンク装置の運動を感知するための前記基準ウェハの前記頂面上に位置する電極を堆積するステップをさらに含む請求項53に記載の方法。
- 前記基準ウェハの前記頂面内に2つの凹部をエッチングするステップをさらに含み、前記凹部が、前記センサ面に垂直な前記質量の運動を収容するために、前記第1および第2の質量と整合している請求項51に記載の方法。
- 感知サブアセンブリをエッチングする前記ステップが、
前記フレームに連結され、また前記第1および第2の質量におよびその間に連結されているセンター・プレートをエッチングするステップと、
前記フレームおよび前記第1の質量に連結されている第1の縁部プレートをエッチングするステップと、
前記フレームおよび前記第2の質量に連結されている第2の縁部プレートをエッチングするステップとをさらに含み、
前記プレートが、前記センサ面に平行な、平行回転軸を中心にして回転することができ、
前記リンク装置が、前記センター・プレートと、前記第1および第2の縁部プレートとをさらに備える請求項51に記載の方法。 - 感知サブアセンブリをエッチングする前記ステップが、
前記センター・プレートを前記フレームに連結している撓み部分の第1のペアをエッチングするステップと、
前記第1の縁部プレートを前記フレームに連結している撓み部分の第2のペアをエッチングするステップと、
前記第2の縁部プレートを前記フレームに連結している撓み部分の第3のペアをエッチングするステップとをさらに含む請求項57に記載の方法。 - 感知サブアセンブリをエッチングする前記ステップが、空気抵抗を低減するために、前記プレートのうちの少なくとも一方に孔部をエッチングするステップをさらに含む請求項57に記載の方法。
- 複数の制御電極を堆積する前記ステップが、
前記基準ウェハの前記頂面上の前記第1の縁部プレートの下に位置し、所定の距離(d)だけ前記第1の縁部プレートから分離している第1の縁部分割電極を堆積するステップと、
前記基準ウェハの前記頂面上の前記第2の縁部プレートの下に位置し、前記距離(d)だけ前記第2の縁部プレートから分離している第2の縁部分割電極を堆積するステップと、
前記基準ウェハの前記頂面上の前記センター・プレートの下に位置し、前記距離(d)だけ前記センター・プレートから分離しているセンター分割電極を堆積するステップとを含む請求項57に記載の方法。 - 前記距離(d)を画定するために、前記基準ウェハの前記頂面上にスタンドオフを堆積するステップをさらに含む請求項60に記載の方法。
- 前記距離(d)を画定するために、前記ベース上にスタンドオフをエッチングするステップをさらに含む請求項60に記載の方法。
- センター・プレートをエッチングする前記ステップが、前記第1の質量に連結されている第1のレバー・アームをエッチングするステップと、前記第2の質量に連結されている第2のレバー・アームをエッチングするステップとをさらに含み、それにより前記センター・プレートの回転に応じた前記センサ面に垂直な前記質量の運動が増大する請求項57に記載の方法。
- 第1の縁部プレートをエッチングする前記ステップが、前記第1の質量に連結されているレバー・アームをエッチングするステップをさらに含み、それにより前記第1の縁部プレートの回転に応じた前記センサ面に垂直な前記第1の質量の運動が増大する請求項57に記載の方法。
- 第2の縁部プレートをエッチングする前記ステップが、前記第2の質量に連結されているレバー・アームをエッチングするステップをさらに含み、それにより前記第2の縁部プレートの回転に応じた前記センサ面に垂直な前記第2の質量の運動が増大する請求項57に記載の方法。
- 前記フレームに前記ベースを連結する複数の撓み部分をエッチングするステップをさらに含む請求項51に記載の方法。
- 感知サブアセンブリをエッチングする前記ステップが、前記ベースの方を向いている前記フレームの表面に溝をエッチングするステップをさらに含み、平らなベースをエッチングする前記ステップが、前記ベースから前記フレームの方向に延び、前記溝と係合しているタブをエッチングするステップをさらに含み、前記タブと前記溝の組合せが、前記フレームの運動の範囲を許容し、それにより前記撓み部分を保護する請求項66に記載の方法。
- 前記フレームを前記基準ウェハに連結する複数の撓み部分をエッチングするステップと、
前記ベースから前記撓み部分を分離している複数のベース分離トレンチをエッチングするステップとをさらに含み、
それにより前記ベースの応力が前記撓み部分に伝わらない請求項51に記載の方法。 - 前記基準ウェハの前記頂面から前記撓み部分を分離している複数の基準分離トレンチをエッチングするステップをさらに含み、
それにより前記基準ウェハの前記頂面の応力が前記撓み部分に伝わらない請求項68に記載の方法。 - シリコン・キャップ・ウェハの底面に前記ベースをキャップ接合するステップをさらに含む請求項51に記載の方法。
- 前記キャップ接合が、ガラス接合、金共融接合、半田接合、Si−Si溶融接合、およびSi−SiO2溶融接合からなるグループから選択される請求項70に記載の方法。
- 前記キャップ接合が、前記基準接合と等しいかより高い温度で行われ、前記キャップ接合が、前記基準接合前に行われる請求項70に記載の方法。
- 前記感知サブアセンブリの運動を収容するように、前記キャップ・ウェハの前記底面内に凹部をエッチングするステップをさらに含む請求項70に記載の方法。
- 前記キャップ接合が、第1の密封接合を含み、前記基準接合が第2の密封接合を含み、それにより前記感知サブアセンブリを囲む密封エンクロージャを提供する請求項70に記載の方法。
- 前記密封エンクロージャ内の圧力を、大気圧とは異なる圧力に変えるステップをさらに含む請求項74に記載の方法。
- 前記第1の密封接合が第1の共融金属シールを含み、前記第2の密封接合が第2の共融金属シールを含む請求項74に記載の方法。
- 前記フレームを前記キャップ・ウェハに連結する複数の撓み部分をエッチングするステップと、
前記ベースから前記撓み部分を分離する複数のベース分離トレンチをエッチングするステップとをさらに含み、
それにより前記ベースの応力が前記撓み部分に伝わらない請求項記70載の方法。 - 前記キャップ・ウェハの前記底面から前記撓み部分を分離している複数のキャップ分離トレンチをエッチングするステップをさらに含み、それにより前記キャップ・ウェハの前記底面の応力が、前記撓み部分に伝わらない請求項77に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/690,224 | 2003-10-20 | ||
| US10/690,224 US6892575B2 (en) | 2003-10-20 | 2003-10-20 | X-Y axis dual-mass tuning fork gyroscope with vertically integrated electronics and wafer-scale hermetic packaging |
| PCT/US2004/034431 WO2005043079A2 (en) | 2003-10-20 | 2004-10-12 | X-y axis dual-mass tuning fork gyroscope with vertically integrated electronics and wafer-scale hermetic packaging |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007509346A JP2007509346A (ja) | 2007-04-12 |
| JP2007509346A5 JP2007509346A5 (ja) | 2007-05-31 |
| JP5021312B2 true JP5021312B2 (ja) | 2012-09-05 |
Family
ID=34521583
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006536699A Expired - Fee Related JP5021312B2 (ja) | 2003-10-20 | 2004-10-12 | 角速度センサ及びその製造方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6892575B2 (ja) |
| EP (1) | EP1676096B1 (ja) |
| JP (1) | JP5021312B2 (ja) |
| TW (1) | TWI247896B (ja) |
| WO (1) | WO2005043079A2 (ja) |
Families Citing this family (119)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7458263B2 (en) * | 2003-10-20 | 2008-12-02 | Invensense Inc. | Method of making an X-Y axis dual-mass tuning fork gyroscope with vertically integrated electronics and wafer-scale hermetic packaging |
| KR100652952B1 (ko) * | 2004-07-19 | 2006-12-06 | 삼성전자주식회사 | 커플링 스프링을 구비한 멤스 자이로스코프 |
| FR2876180B1 (fr) * | 2004-10-06 | 2006-12-08 | Commissariat Energie Atomique | Resonateur a masses oscillantes. |
| FI116544B (fi) * | 2004-12-31 | 2005-12-15 | Vti Technologies Oy | Värähtelevä mikromekaaninen kulmanopeusanturi |
| FI116543B (fi) * | 2004-12-31 | 2005-12-15 | Vti Technologies Oy | Värähtelevä mikromekaaninen kulmanopeusanturi |
| US7442570B2 (en) | 2005-03-18 | 2008-10-28 | Invensence Inc. | Method of fabrication of a AL/GE bonding in a wafer packaging environment and a product produced therefrom |
| US7240552B2 (en) * | 2005-06-06 | 2007-07-10 | Bei Technologies, Inc. | Torsional rate sensor with momentum balance and mode decoupling |
| US7621183B2 (en) * | 2005-11-18 | 2009-11-24 | Invensense Inc. | X-Y axis dual-mass tuning fork gyroscope with vertically integrated electronics and wafer-scale hermetic packaging |
| CN103278147B (zh) | 2006-01-24 | 2015-11-04 | 松下电器产业株式会社 | 惯性力传感器 |
| JP4974340B2 (ja) * | 2006-05-15 | 2012-07-11 | 住友精密工業株式会社 | 角速度センサ |
| JP4310325B2 (ja) * | 2006-05-24 | 2009-08-05 | 日立金属株式会社 | 角速度センサ |
| US7434464B2 (en) * | 2006-09-29 | 2008-10-14 | Freescale Semiconductor, Inc. | Methods and apparatus for a MEMS gyro sensor |
| DE102006046772A1 (de) * | 2006-09-29 | 2008-04-03 | Siemens Ag | Anordnung zur Messung einer Drehrate mit einem Vibrationssensor |
| US7461552B2 (en) * | 2006-10-23 | 2008-12-09 | Custom Sensors & Technologies, Inc. | Dual axis rate sensor |
| JP4942470B2 (ja) * | 2006-12-20 | 2012-05-30 | 住友精密工業株式会社 | 2軸角速度センサ |
| US8250921B2 (en) | 2007-07-06 | 2012-08-28 | Invensense, Inc. | Integrated motion processing unit (MPU) with MEMS inertial sensing and embedded digital electronics |
| US8462109B2 (en) | 2007-01-05 | 2013-06-11 | Invensense, Inc. | Controlling and accessing content using motion processing on mobile devices |
| US8508039B1 (en) * | 2008-05-08 | 2013-08-13 | Invensense, Inc. | Wafer scale chip scale packaging of vertically integrated MEMS sensors with electronics |
| US20090265671A1 (en) * | 2008-04-21 | 2009-10-22 | Invensense | Mobile devices with motion gesture recognition |
| US8952832B2 (en) * | 2008-01-18 | 2015-02-10 | Invensense, Inc. | Interfacing application programs and motion sensors of a device |
| US8047075B2 (en) | 2007-06-21 | 2011-11-01 | Invensense, Inc. | Vertically integrated 3-axis MEMS accelerometer with electronics |
| US7934423B2 (en) | 2007-12-10 | 2011-05-03 | Invensense, Inc. | Vertically integrated 3-axis MEMS angular accelerometer with integrated electronics |
| US7796872B2 (en) * | 2007-01-05 | 2010-09-14 | Invensense, Inc. | Method and apparatus for producing a sharp image from a handheld device containing a gyroscope |
| US20090262074A1 (en) * | 2007-01-05 | 2009-10-22 | Invensense Inc. | Controlling and accessing content using motion processing on mobile devices |
| US8020441B2 (en) | 2008-02-05 | 2011-09-20 | Invensense, Inc. | Dual mode sensing for vibratory gyroscope |
| US8141424B2 (en) | 2008-09-12 | 2012-03-27 | Invensense, Inc. | Low inertia frame for detecting coriolis acceleration |
| US20100071467A1 (en) * | 2008-09-24 | 2010-03-25 | Invensense | Integrated multiaxis motion sensor |
| JP4792143B2 (ja) * | 2007-02-22 | 2011-10-12 | 株式会社デンソー | 半導体装置およびその製造方法 |
| CN101711364A (zh) * | 2007-04-13 | 2010-05-19 | 领航网络有限公司 | 确定移动物体的旋转半径的力传感设备和方法 |
| KR100856293B1 (ko) * | 2007-05-04 | 2008-09-03 | 삼성전기주식회사 | 수정 진동자 제조방법 |
| EP2011762B1 (en) | 2007-07-02 | 2015-09-30 | Denso Corporation | Semiconductor device with a sensor connected to an external element |
| US20090085194A1 (en) * | 2007-09-28 | 2009-04-02 | Honeywell International Inc. | Wafer level packaged mems device |
| US7677099B2 (en) * | 2007-11-05 | 2010-03-16 | Invensense Inc. | Integrated microelectromechanical systems (MEMS) vibrating mass Z-axis rate sensor |
| US8125512B2 (en) * | 2007-11-16 | 2012-02-28 | Samsung Electronics Co., Ltd. | System and method for moving object selection in a handheld image capture device |
| US8089518B2 (en) * | 2007-11-16 | 2012-01-03 | Samsung Electronics Co., Ltd. | System and method for automatic image capture in a handheld camera with a multiple-axis actuating mechanism |
| JP5450451B2 (ja) * | 2008-02-05 | 2014-03-26 | インベンセンス,インク. | 垂直方向に集積した電子回路およびウェハスケール密封包装を含むx−y軸二重質量音叉ジャイロスコープ |
| US7971483B2 (en) * | 2008-03-28 | 2011-07-05 | Honeywell International Inc. | Systems and methods for acceleration and rotational determination from an out-of-plane MEMS device |
| US7984648B2 (en) | 2008-04-10 | 2011-07-26 | Honeywell International Inc. | Systems and methods for acceleration and rotational determination from an in-plane and out-of-plane MEMS device |
| US8011247B2 (en) * | 2008-06-26 | 2011-09-06 | Honeywell International Inc. | Multistage proof-mass movement deceleration within MEMS structures |
| KR101001666B1 (ko) * | 2008-07-08 | 2010-12-15 | 광주과학기술원 | 마이크로 수직 구조체의 제조 방법 |
| US8682606B2 (en) * | 2008-10-07 | 2014-03-25 | Qualcomm Incorporated | Generating virtual buttons using motion sensors |
| JP2010117292A (ja) * | 2008-11-14 | 2010-05-27 | Alps Electric Co Ltd | 角速度センサ |
| DE102008043796B4 (de) | 2008-11-17 | 2023-12-21 | Robert Bosch Gmbh | Drehratensensor |
| US8351910B2 (en) * | 2008-12-02 | 2013-01-08 | Qualcomm Incorporated | Method and apparatus for determining a user input from inertial sensors |
| DE102009001244A1 (de) * | 2009-02-27 | 2010-09-02 | Sensordynamics Ag | Mikro-Gyroskop zur Ermittlung von Rotationsbewegungen um eine x-, y- oder z-Achse |
| FI20095201A0 (fi) * | 2009-03-02 | 2009-03-02 | Vti Technologies Oy | Värähtelevä mikromekaaninen kulmanopeusanturi |
| US8151641B2 (en) * | 2009-05-21 | 2012-04-10 | Analog Devices, Inc. | Mode-matching apparatus and method for micromachined inertial sensors |
| US8266961B2 (en) * | 2009-08-04 | 2012-09-18 | Analog Devices, Inc. | Inertial sensors with reduced sensitivity to quadrature errors and micromachining inaccuracies |
| US8593155B2 (en) * | 2009-08-13 | 2013-11-26 | Analog Devices, Inc. | MEMS in-plane resonators |
| US8783103B2 (en) | 2009-08-21 | 2014-07-22 | Analog Devices, Inc. | Offset detection and compensation for micromachined inertial sensors |
| WO2011029878A1 (de) | 2009-09-09 | 2011-03-17 | Continental Teves Ag & Co. Ohg | Doppelaxialer, schockrobuster, drehratensensor mit linearen und rotatorischen seismischen elementen |
| US8534127B2 (en) * | 2009-09-11 | 2013-09-17 | Invensense, Inc. | Extension-mode angular velocity sensor |
| US9097524B2 (en) * | 2009-09-11 | 2015-08-04 | Invensense, Inc. | MEMS device with improved spring system |
| US8701459B2 (en) * | 2009-10-20 | 2014-04-22 | Analog Devices, Inc. | Apparatus and method for calibrating MEMS inertial sensors |
| US9021880B2 (en) | 2010-04-30 | 2015-05-05 | Qualcomm Mems Technologies, Inc. | Micromachined piezoelectric three-axis gyroscope and stacked lateral overlap transducer (slot) based three-axis accelerometer |
| US8966400B2 (en) | 2010-06-07 | 2015-02-24 | Empire Technology Development Llc | User movement interpretation in computer generated reality |
| TWI434803B (zh) | 2010-06-30 | 2014-04-21 | Ind Tech Res Inst | 微機電元件與電路晶片之整合裝置及其製造方法 |
| US8395381B2 (en) | 2010-07-09 | 2013-03-12 | Invensense, Inc. | Micromachined magnetic field sensors |
| US20120007597A1 (en) * | 2010-07-09 | 2012-01-12 | Invensense, Inc. | Micromachined offset reduction structures for magnetic field sensing |
| US8567246B2 (en) | 2010-10-12 | 2013-10-29 | Invensense, Inc. | Integrated MEMS device and method of use |
| US9091544B2 (en) | 2010-11-05 | 2015-07-28 | Analog Devices, Inc. | XY-axis shell-type gyroscopes with reduced cross-talk sensitivity and/or mode matching |
| US8631700B2 (en) | 2010-11-05 | 2014-01-21 | Analog Devices, Inc. | Resonating sensor with mechanical constraints |
| US8919199B2 (en) | 2010-12-01 | 2014-12-30 | Analog Devices, Inc. | Apparatus and method for anchoring electrodes in MEMS devices |
| US8616056B2 (en) | 2010-11-05 | 2013-12-31 | Analog Devices, Inc. | BAW gyroscope with bottom electrode |
| US8604663B2 (en) * | 2010-11-15 | 2013-12-10 | DigitalOptics Corporation MEMS | Motion controlled actuator |
| DE102010062056B4 (de) | 2010-11-26 | 2018-09-27 | Robert Bosch Gmbh | Mikromechanisches Bauteil |
| US8947081B2 (en) | 2011-01-11 | 2015-02-03 | Invensense, Inc. | Micromachined resonant magnetic field sensors |
| US9664750B2 (en) | 2011-01-11 | 2017-05-30 | Invensense, Inc. | In-plane sensing Lorentz force magnetometer |
| US8860409B2 (en) | 2011-01-11 | 2014-10-14 | Invensense, Inc. | Micromachined resonant magnetic field sensors |
| JP5790915B2 (ja) * | 2011-01-13 | 2015-10-07 | セイコーエプソン株式会社 | 物理量センサー及び電子機器 |
| US9039976B2 (en) | 2011-01-31 | 2015-05-26 | Analog Devices, Inc. | MEMS sensors with closed nodal anchors for operation in an in-plane contour mode |
| JP5807381B2 (ja) * | 2011-05-20 | 2015-11-10 | セイコーエプソン株式会社 | 物理量センサー、および電子機器 |
| US9705450B2 (en) * | 2011-06-24 | 2017-07-11 | The United States Of America As Represented By The Secretary Of The Navy | Apparatus and methods for time domain measurement of oscillation perturbations |
| US20130001710A1 (en) * | 2011-06-29 | 2013-01-03 | Invensense, Inc. | Process for a sealed mems device with a portion exposed to the environment |
| EP2544370B1 (en) * | 2011-07-06 | 2020-01-01 | Nxp B.V. | MEMS resonator |
| US9863769B2 (en) | 2011-09-16 | 2018-01-09 | Invensense, Inc. | MEMS sensor with decoupled drive system |
| US10914584B2 (en) | 2011-09-16 | 2021-02-09 | Invensense, Inc. | Drive and sense balanced, semi-coupled 3-axis gyroscope |
| US9714842B2 (en) | 2011-09-16 | 2017-07-25 | Invensense, Inc. | Gyroscope self test by applying rotation on coriolis sense mass |
| US8833162B2 (en) * | 2011-09-16 | 2014-09-16 | Invensense, Inc. | Micromachined gyroscope including a guided mass system |
| US9170107B2 (en) * | 2011-09-16 | 2015-10-27 | Invensense, Inc. | Micromachined gyroscope including a guided mass system |
| US8739627B2 (en) | 2011-10-26 | 2014-06-03 | Freescale Semiconductor, Inc. | Inertial sensor with off-axis spring system |
| DE102011056971A1 (de) * | 2011-12-23 | 2013-06-27 | Maxim Integrated Products, Inc. | Mikromechanischer Coriolis-Drehratensensor |
| TWI453371B (zh) | 2011-12-30 | 2014-09-21 | Ind Tech Res Inst | 一種具振盪模組的微機電系統裝置 |
| DE102012200132A1 (de) | 2012-01-05 | 2013-07-11 | Robert Bosch Gmbh | Drehratensensor und Verfahren zum Betrieb eines Drehratensensors |
| US8984942B2 (en) * | 2012-02-10 | 2015-03-24 | Hewlett-Packard Development Company, L.P. | Suspended masses in micro-mechanical devices |
| JP5708535B2 (ja) * | 2012-03-13 | 2015-04-30 | 株式会社デンソー | 角速度センサ |
| US9212908B2 (en) | 2012-04-26 | 2015-12-15 | Analog Devices, Inc. | MEMS gyroscopes with reduced errors |
| US9194704B2 (en) | 2013-03-13 | 2015-11-24 | Freescale Semiconductor, Inc. | Angular rate sensor having multiple axis sensing capability |
| WO2015042700A1 (en) | 2013-09-24 | 2015-04-02 | Motion Engine Inc. | Mems components and method of wafer-level manufacturing thereof |
| EP3019442A4 (en) | 2013-07-08 | 2017-01-25 | Motion Engine Inc. | Mems device and method of manufacturing |
| WO2015013828A1 (en) | 2013-08-02 | 2015-02-05 | Motion Engine Inc. | Mems motion sensor and method of manufacturing |
| US9709595B2 (en) | 2013-11-14 | 2017-07-18 | Analog Devices, Inc. | Method and apparatus for detecting linear and rotational movement |
| US9599471B2 (en) | 2013-11-14 | 2017-03-21 | Analog Devices, Inc. | Dual use of a ring structure as gyroscope and accelerometer |
| JP6590812B2 (ja) | 2014-01-09 | 2019-10-16 | モーション・エンジン・インコーポレーテッド | 集積memsシステム |
| US9958271B2 (en) | 2014-01-21 | 2018-05-01 | Invensense, Inc. | Configuration to reduce non-linear motion |
| JP2015184009A (ja) | 2014-03-20 | 2015-10-22 | セイコーエプソン株式会社 | 振動素子、電子機器、および移動体 |
| WO2015154173A1 (en) | 2014-04-10 | 2015-10-15 | Motion Engine Inc. | Mems pressure sensor |
| US11674803B2 (en) | 2014-06-02 | 2023-06-13 | Motion Engine, Inc. | Multi-mass MEMS motion sensor |
| JP6481294B2 (ja) | 2014-09-05 | 2019-03-13 | セイコーエプソン株式会社 | 物理量センサー素子、物理量センサー、電子機器および移動体 |
| JP2016057073A (ja) | 2014-09-05 | 2016-04-21 | セイコーエプソン株式会社 | 物理量センサー素子、物理量センサー、電子機器および移動体 |
| JP6481293B2 (ja) | 2014-09-05 | 2019-03-13 | セイコーエプソン株式会社 | 物理量センサー素子、物理量センサー、電子機器および移動体 |
| WO2016040018A1 (en) | 2014-09-08 | 2016-03-17 | Invensense Incorporated | System and method for hierarchical sensor processing |
| US10746548B2 (en) | 2014-11-04 | 2020-08-18 | Analog Devices, Inc. | Ring gyroscope structural features |
| WO2016090467A1 (en) | 2014-12-09 | 2016-06-16 | Motion Engine Inc. | 3d mems magnetometer and associated methods |
| US10231337B2 (en) | 2014-12-16 | 2019-03-12 | Inertial Sense, Inc. | Folded printed circuit assemblies and related methods |
| US10407299B2 (en) | 2015-01-15 | 2019-09-10 | Motion Engine Inc. | 3D MEMS device with hermetic cavity |
| KR101659207B1 (ko) | 2015-02-05 | 2016-09-22 | 삼성전기주식회사 | 각속도 센서 |
| WO2016130722A1 (en) | 2015-02-11 | 2016-08-18 | Invensense, Inc. | 3D INTEGRATION USING Al-Ge EUTECTIC BOND INTERCONNECT |
| US9869552B2 (en) * | 2015-03-20 | 2018-01-16 | Analog Devices, Inc. | Gyroscope that compensates for fluctuations in sensitivity |
| KR101915954B1 (ko) * | 2016-06-29 | 2018-11-08 | 주식회사 신성씨앤티 | 멤스 기반의 3축 가속도 센서 |
| US10192850B1 (en) | 2016-09-19 | 2019-01-29 | Sitime Corporation | Bonding process with inhibited oxide formation |
| JP6639377B2 (ja) | 2016-12-08 | 2020-02-05 | 株式会社東芝 | 振動装置 |
| DE102017200725A1 (de) | 2017-01-18 | 2018-07-19 | Robert Bosch Gmbh | Mikromechanischer Sensor |
| US10466053B2 (en) * | 2017-04-04 | 2019-11-05 | Invensense, Inc. | Out-of-plane sensing gyroscope robust to external acceleration and rotation |
| US11656077B2 (en) | 2019-01-31 | 2023-05-23 | Analog Devices, Inc. | Pseudo-extensional mode MEMS ring gyroscope |
| US11060866B2 (en) * | 2019-02-15 | 2021-07-13 | Murata Manufacturing Co., Ltd. | Balanced multiaxis gyroscope |
| EP3696503B1 (en) * | 2019-02-15 | 2022-10-26 | Murata Manufacturing Co., Ltd. | Vibration-robust multiaxis gyroscope |
| DE102020205372A1 (de) * | 2020-04-28 | 2021-10-28 | Robert Bosch Gesellschaft mit beschränkter Haftung | Mikromechanisches Bauteil für einen Drehratensensor und entsprechendes Herstellungsverfahren |
| US11714102B2 (en) | 2021-06-08 | 2023-08-01 | Analog Devices, Inc. | Fully differential accelerometer |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5359893A (en) * | 1991-12-19 | 1994-11-01 | Motorola, Inc. | Multi-axes gyroscope |
| DE4414237A1 (de) * | 1994-04-23 | 1995-10-26 | Bosch Gmbh Robert | Mikromechanischer Schwinger eines Schwingungsgyrometers |
| DE19523895A1 (de) * | 1995-06-30 | 1997-01-02 | Bosch Gmbh Robert | Beschleunigungssensor |
| US5992233A (en) | 1996-05-31 | 1999-11-30 | The Regents Of The University Of California | Micromachined Z-axis vibratory rate gyroscope |
| JPH1038578A (ja) * | 1996-07-17 | 1998-02-13 | Tokin Corp | 角速度センサ |
| US6122961A (en) | 1997-09-02 | 2000-09-26 | Analog Devices, Inc. | Micromachined gyros |
| JP3882973B2 (ja) * | 1998-06-22 | 2007-02-21 | アイシン精機株式会社 | 角速度センサ |
| JP3106395B2 (ja) * | 1998-07-10 | 2000-11-06 | 株式会社村田製作所 | 角速度センサ |
| US6481283B1 (en) | 1999-04-05 | 2002-11-19 | Milli Sensor Systems & Actuators, Inc. | Coriolis oscillating gyroscopic instrument |
| US6481285B1 (en) | 1999-04-21 | 2002-11-19 | Andrei M. Shkel | Micro-machined angle-measuring gyroscope |
| US6189381B1 (en) * | 1999-04-26 | 2001-02-20 | Sitek, Inc. | Angular rate sensor made from a structural wafer of single crystal silicon |
| US6487907B1 (en) | 1999-07-08 | 2002-12-03 | California Institute Of Technology | Microgyroscope with integrated vibratory element |
| US6508122B1 (en) | 1999-09-16 | 2003-01-21 | American Gnc Corporation | Microelectromechanical system for measuring angular rate |
| KR100343211B1 (ko) | 1999-11-04 | 2002-07-10 | 윤종용 | 웨이퍼 레벨 진공 패키징이 가능한 mems의 구조물의제작방법 |
| US6370937B2 (en) | 2000-03-17 | 2002-04-16 | Microsensors, Inc. | Method of canceling quadrature error in an angular rate sensor |
| JP2002148048A (ja) * | 2000-11-08 | 2002-05-22 | Murata Mfg Co Ltd | 角速度検出素子 |
| US6480320B2 (en) | 2001-02-07 | 2002-11-12 | Transparent Optical, Inc. | Microelectromechanical mirror and mirror array |
| US6513380B2 (en) | 2001-06-19 | 2003-02-04 | Microsensors, Inc. | MEMS sensor with single central anchor and motion-limiting connection geometry |
| US6629460B2 (en) * | 2001-08-10 | 2003-10-07 | The Boeing Company | Isolated resonator gyroscope |
| KR100436367B1 (ko) | 2001-12-14 | 2004-06-19 | 삼성전자주식회사 | 수직 진동 질량체를 갖는 멤스 자이로스코프 |
| KR100431004B1 (ko) | 2002-02-08 | 2004-05-12 | 삼성전자주식회사 | 회전형 비연성 멤스 자이로스코프 |
-
2003
- 2003-10-20 US US10/690,224 patent/US6892575B2/en not_active Expired - Lifetime
-
2004
- 2004-10-12 EP EP04795573.7A patent/EP1676096B1/en active Active
- 2004-10-12 JP JP2006536699A patent/JP5021312B2/ja not_active Expired - Fee Related
- 2004-10-12 WO PCT/US2004/034431 patent/WO2005043079A2/en active Application Filing
- 2004-10-15 TW TW093131432A patent/TWI247896B/zh active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2005043079A3 (en) | 2005-08-11 |
| EP1676096B1 (en) | 2017-06-07 |
| EP1676096A2 (en) | 2006-07-05 |
| WO2005043079A2 (en) | 2005-05-12 |
| TW200526961A (en) | 2005-08-16 |
| US20050081633A1 (en) | 2005-04-21 |
| TWI247896B (en) | 2006-01-21 |
| EP1676096A4 (en) | 2009-11-18 |
| JP2007509346A (ja) | 2007-04-12 |
| US6892575B2 (en) | 2005-05-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5021312B2 (ja) | 角速度センサ及びその製造方法 | |
| US7250112B2 (en) | Method of making an X-Y axis dual-mass tuning fork gyroscope with vertically integrated electronics and wafer-scale hermetic packaging | |
| US7621183B2 (en) | X-Y axis dual-mass tuning fork gyroscope with vertically integrated electronics and wafer-scale hermetic packaging | |
| KR101105059B1 (ko) | 수직으로 집적화된 일렉트로닉스 및 웨이퍼 스케일 밀봉패키징을 갖는 x―y축 듀얼 매스 튜닝 포크자이로스코프를 제조 방법 | |
| JP5450451B2 (ja) | 垂直方向に集積した電子回路およびウェハスケール密封包装を含むx−y軸二重質量音叉ジャイロスコープ | |
| KR101100021B1 (ko) | Z-축 각속도 센서 | |
| US9683844B2 (en) | Extension-mode angular velocity sensor | |
| CN107576322B (zh) | 具有分开z轴部分的微电子机械系统(MEMS)质量块 | |
| EP2462408B1 (en) | Micromachined inertial sensor devices | |
| EP1212585B1 (en) | Electrically decoupled micromachined gyroscope | |
| US8739626B2 (en) | Micromachined inertial sensor devices | |
| Seeger et al. | Development of high-performance high-volume consumer MEMS gyroscopes | |
| US20120210789A1 (en) | Physical quantity sensor and electronic device | |
| KR100319920B1 (ko) | 비대칭 내부 비틀림 짐벌을 가진 측면 구동 방식의 짐벌형 자이로스코프 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070326 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070326 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100910 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100921 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20101221 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110104 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110322 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110524 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110824 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120522 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120614 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5021312 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150622 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |