JP4926984B2 - プレートハンドリングシステム - Google Patents
プレートハンドリングシステム Download PDFInfo
- Publication number
- JP4926984B2 JP4926984B2 JP2007557093A JP2007557093A JP4926984B2 JP 4926984 B2 JP4926984 B2 JP 4926984B2 JP 2007557093 A JP2007557093 A JP 2007557093A JP 2007557093 A JP2007557093 A JP 2007557093A JP 4926984 B2 JP4926984 B2 JP 4926984B2
- Authority
- JP
- Japan
- Prior art keywords
- plate
- picker
- picking
- stack
- rotation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H3/00—Separating articles from piles
- B65H3/44—Simultaneously, alternately, or selectively separating articles from two or more piles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H3/00—Separating articles from piles
- B65H3/08—Separating articles from piles using pneumatic force
- B65H3/0808—Suction grippers
- B65H3/0816—Suction grippers separating from the top of pile
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H3/00—Separating articles from piles
- B65H3/24—Separating articles from piles by pushers engaging the edges of the articles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H9/00—Registering, e.g. orientating, articles; Devices therefor
- B65H9/08—Holding devices, e.g. finger, needle, suction, for retaining articles in registered position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2406/00—Means using fluid
- B65H2406/30—Suction means
- B65H2406/34—Suction grippers
- B65H2406/342—Suction grippers being reciprocated in a rectilinear path
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2511/00—Dimensions; Position; Numbers; Identification; Occurrences
- B65H2511/20—Location in space
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2511/00—Dimensions; Position; Numbers; Identification; Occurrences
- B65H2511/50—Occurence
- B65H2511/51—Presence
- B65H2511/514—Particular portion of element
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2553/00—Sensing or detecting means
- B65H2553/80—Arangement of the sensing means
- B65H2553/81—Arangement of the sensing means on a movable element
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2701/00—Handled material; Storage means
- B65H2701/10—Handled articles or webs
- B65H2701/18—Form of handled article or web
- B65H2701/182—Piled package
- B65H2701/1826—Arrangement of sheets
- B65H2701/18264—Pile of alternate articles of different properties, e.g. pile of working sheets with intermediate sheet between each working sheet
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2701/00—Handled material; Storage means
- B65H2701/10—Handled articles or webs
- B65H2701/19—Specific article or web
- B65H2701/1928—Printing plate
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Sheets, Magazines, And Separation Thereof (AREA)
Description
・ 多種の寸法を有し、可変の量のスタックにおいてまとめられ、各スタックが同一の寸法のプレートを有するようにされる、複数のプレートを格納し、
・ IS102によって求められる特定の寸法を有するプレートをピックし、
・ ピックされたプレートをプレート経路120に沿ってIS102上のプレート入口104まで運搬し、
・ 保護差込みスリップシートを、プレートスタックの上部からスリップシート経路130に沿って格納範囲まで運搬することによって除去するよう、
構成される。
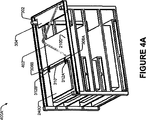
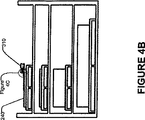
・ プレートピッカーバー430に対して取り付けられる、ピッカーアーム432、
・ プレートピッカーバー430の下部の近くに取り付けられ、ピッカーアーム432の長手方向軸と整列される、電気光学センサ等である水平方向センサ444、
・ 水平方向センサ444の上方に取り付けられ、ピッカーアーム432の長手方向軸と整列される、スリップシートシュー438、及び、
・ 延長可能であるプレートプッシャー440、
を有する。
Claims (16)
- イメージングシステムによる露出に先立ってプリントプレートをハンドリングする方法であって、
1つ又はそれより多くのプレートをピックアップする前にプレートスタック情報を取得する段階を含み、
上部プレートのピッキング端部の位置及び回転を検出する段階を含む前記プレートスタック情報を使用することによって、プレートハンドリングシステムのプレートピッカーを、格納範囲における実際の位置において上部プレートを有するプレートスタックと整列させる段階を含み、前記プレートは、格納配置を有し、
前記プレートピッカーを、前記上部プレートの検出済みピッキング端部の位置及び回転と整列するピッキングの向きに移動させる段階を含み、
前記プレートハンドリングシステムの前記プレートピッカーを、前記プレートスタックの前記上部プレートの実際の前記ピッキング端部の位置及び回転と整列させる段階を含み、前記プレートは、2つの角部を有するピッキング縁部を有し、前記実際のピッキング縁部の位置及び回転は、前記プレートスタックの前記意図される配置に対応する前記ピッキング縁部の意図される位置及び回転とは異なり、
前記上部プレートを前記プレートスタックからピックする段階を含む、前記格納範囲における前記実際の配置から前記プレートをピックする段階を含み、
前記プレートをプレート経路方向において運搬位置まで移動させる段階を含み、
前記ピックされるプレートを前記運搬位置から前記イメージングシステムまで露出のために運搬する段階を含み、
前記プレートプッシャーによって前記上部プレートを前記プレート経路に沿って前記プレート運搬位置まで移動させる段階を含む、前記ピックされたプレートをプレート経路方向において運搬位置まで移動させるようプレートプッシャーをプレート運搬方向に沿って移動させる段階を含む、
方法。 - 前記プレートスタック情報は、
前記プレートスタックの前記上部プレートの推定されるピッキング端部の位置を更に含む、
請求項1に記載の方法。 - 前記プレートスタック情報は、
プレートスタックの寸法と、前記プレートスタックにおけるプレートの量と、プレートの寸法とを含む、
請求項1に記載の方法。 - 前記プレートスタックに関する前記情報に基づき、プレートピッカーを前記上部プレートの前記ピッキング端部に向かって移動させる段階は、
プレートピッカーバーを前記プレート経路方向に沿って前記上部プレートの前記推定されるピッキング端部の位置まで移動させる段階と、
前記推定されるピッキング端部の位置及び前記プレートスタック寸法に基づき、前記ピッカーを前記ピッキング端部の1つ又はそれより多い角部に対して推定される位置まで前記ピッカーバーに沿って移動させる段階とを含む、
請求項1に記載の方法。 - 前記上部プレートの前記ピッキング端部の位置及び回転を検出する段階は、前記上部プレートの前記ピッキング端部の前記1つ又はそれより多い角部の前記位置を検出するよう検出器を位置付けるために、前記ピッカーバー及びピッカー要素を移動させる段階を含む、
請求項4に記載の方法。 - 前記プレートピッカーを検出された前記上部プレートの前記ピッキング端部の位置及び回転と整列するピッキングの向きへと移動させる段階は、
前記上部プレートの前記ピッキング端部の前記1つ又はそれより多い角部の前記検出される位置と整列して前記ピッキング要素を位置付けるよう、前記ピッカーバー及びピッキング要素を移動させる段階を含む、
請求項5に記載の方法。 - 前記上部プレートを前記プレートスタックからピックする段階は、
前記上部プレートの前記ピッキング端部の各角部を持ち上げる段階と、
持ち上げられた各角部の下方の空間からスリップシートを引きつける段階と、
前記引きつけられるスリップシートを保持する段階とを含み、
前記スリップシートは、前記上部プレートの下方表面又は前記プレートスタックの上方表面のいずれかに対して接着する、
請求項1に記載の方法。 - 前記上部プレートの前記ピッキング端部の前記角部を持ち上げる段階は、前記プレート角部を持ち上げるために低圧範囲を作るよう、プレートカップを介して空気を送る段階を含む、
請求項7に記載の方法。 - 持ち上げられた各角部の下方の前記空間から前記スリップシートを引きつける段階は、
前記持ち上げられた角部の下方の前記空間へとスリップシートシューを移動させる段階と、
前記スリップシートを真空ホールまで引きつけるよう、前記スリップシートシューに対して真空を適用する段階とを含む、
請求項7に記載の方法。 - 前記引きつけられるスリップシートを保持する段階は、前記スリップシートシューに対して前記真空を維持する段階を含む、
請求項7に記載の方法。 - プレートをイメージングシステムに対して供給するプレート装置であって、
プレート格納設備と、
プレートハンドリング作動を制御するコントローラと、
前記プレートをピックするプレートピッカーと、
露出のために前記プレートを前記イメージングシステムまで運搬するプレート運搬器とを含み、
前記プレート格納設備は、実際の位置及び回転において実際の格納配置を備えるプレートを有する少なくとも1つの格納範囲を含み、前記実際の格納配置は、前記プレートの意図される配置とは異なることができ、
前記コントローラは、前記プレートの前記実際の位置及び回転を自動的に定め、且つ、ピッキングに先立って前記プレートピッカーを前記プレートの前記実際の位置及び回転と整列させるよう作動可動であり、
前記コントローラは、プレートプッシャーをプレート運搬方向に沿って移動させるよう作動し、且つ、前記上部プレートを前記プレート経路位置に沿ってプレート運搬位置まで移動させるよう前記プレートプッシャーを移動させることによって、前記ピックされたプレートを前記プレート経路方向において前記プレート運搬位置まで移動させるようにも作動可能である、
プレート装置。 - 前記意図される配置と異なり得る実際の配置を備えるプレートスタックを有するプレート格納設備と、
前記プレートスタックの上部プレートをピックするプレートピッカーと、
露出のために前記ピックされたプレートを前記イメージングシステムまで運搬するプレート運搬器とを更に含み、
前記プレートスタックのプレートは、2つの角部と、実際の位置と、実際の回転とを有するピッキング端部を備えるプレートを含み、前記ピッキング端部の前記実際の位置及び回転は、前記プレートスタックの前記意図される配置に対応する前記ピッキング端部の意図される位置及び回転と異なり、
前記コントローラは、前記プレートスタックの前記上部プレートの前記位置及び回転を自動的に決定し、且つ、ピッキングに先立って前記プレートピッカーを前記上部プレートの前記位置及び回転と整列させるよう作動可能である、
請求項11に記載のプレート装置。 - 前記プレートピッカーは、
前記プレート経路方向に対して垂直に公称的に配列され且つプレート経路方向に沿って移動されるよう作動可能であるピッカーバーと、
該ピッカーバー上に取り付けられ且つ前記ピッカーバーに沿って独立して移動されるよう作動可能である一組のピッカー要素と、
プレートを検出するために各ピッカー要素と結合されるプレート検出器とを含む、
請求項11に記載のプレート装置。 - 前記コントローラは、
前記プレートを含むプレートスタックに関する情報を取得し、
前記プレートスタックに関する前記情報に基づき、前記プレートピッカーを前記プレートスタックの上部プレートと整列させるよう垂直方向に移動させ、
前記プレートスタックに関する前記情報に基づき、前記プレートピッカーを前記上部プレートの前記ピッキング端部に向かって移動させ、
前記上部プレートの前記ピッキング端部の1つ又はそれより多い角部の位置を検出するために前記検出器を位置付けるよう前記ピッカーバー及びピッカー要素を移動させ、
前記プレートピッカーから前記上部プレートの検出されたピッキング端部の位置及び回転を取得し、
前記プレートピッカーを前記上部プレートの前記検出されるピッキング端部の位置及び回転と整列するピッキング向きに移動させ、
前記プレートスタックから前記上部プレートをピックするよう前記プレートピッカーを作動させ、
前記ピックされるプレートを前記イメージングシステムまで運搬するよう前記プレート運搬器を作動させるよう作動可能である、
請求項11に記載のプレート装置。 - 前記プレートピッカーは、前記ピックされるプレートを前記プレート経路方向において運搬位置まで動かすよう作動可能であり、前記プレート運搬器は、前記ピックされるプレートを前記運搬位置から前記イメージングシステムまで運搬するようにも作動可能である、請求項11に記載のプレート装置。
- 前記コントローラは、前記ピックされるプレートを前記プレート経路方向において前記運搬位置まで移動させるよう前記プレートピッカーを作動させるようにも作動可能である、請求項11に記載のプレート装置。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US65449405P | 2005-02-22 | 2005-02-22 | |
| US60/654,494 | 2005-02-22 | ||
| US34382306A | 2006-01-31 | 2006-01-31 | |
| US11/343,823 | 2006-01-31 | ||
| PCT/US2006/006019 WO2006091558A1 (en) | 2005-02-22 | 2006-02-22 | Plate handling system |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008532076A JP2008532076A (ja) | 2008-08-14 |
| JP2008532076A5 JP2008532076A5 (ja) | 2009-04-02 |
| JP4926984B2 true JP4926984B2 (ja) | 2012-05-09 |
Family
ID=36572327
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007557093A Expired - Fee Related JP4926984B2 (ja) | 2005-02-22 | 2006-02-22 | プレートハンドリングシステム |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP1853501B1 (ja) |
| JP (1) | JP4926984B2 (ja) |
| WO (1) | WO2006091558A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7744078B2 (en) | 2007-01-30 | 2010-06-29 | Eastman Kodak Company | Methods and apparatus for storing slip-sheets |
| EP1980510A1 (en) * | 2007-04-11 | 2008-10-15 | Punch Graphix International N.V. | Loading device, input section, method for loading a printing plate, computer system and computer program product |
| US7888664B2 (en) * | 2008-03-10 | 2011-02-15 | Eastman Kodak Company | Plate pallet alignment system |
| IT1394149B1 (it) * | 2008-09-12 | 2012-05-25 | Panotec Srl | Apparecchiatura per il caricamento di un materiale relativamente rigido, ad esempio cartone, e relativo procedimento di caricamento |
| US8739702B2 (en) | 2008-11-13 | 2014-06-03 | Eastman Kodak Company | Printing plate loading apparatus for loading plates from either a plate stack or cassette |
| EP2653419A1 (en) * | 2012-04-19 | 2013-10-23 | Xeikon IP B.V. | A handling system for transferring printing plates and a method |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2163083C3 (de) * | 1971-12-18 | 1974-05-16 | Heidelberger Druckmaschinen Ag, 6900 Heidelberg | Saugkopf einer Bogenanlegevorrichtung für Druckmaschinen |
| DE8900217U1 (de) * | 1989-01-10 | 1989-02-23 | Agfa-Gevaert Ag, 5090 Leverkusen | Vorrichtung zur Entnahme von Blattfilmen, insbesondere Röntgenfilmen, aus einem Magazin |
| JP2669572B2 (ja) * | 1991-11-12 | 1997-10-29 | 富士写真フイルム株式会社 | 印刷版搬送装置 |
| JPH05246011A (ja) * | 1992-03-09 | 1993-09-24 | Fuji Photo Film Co Ltd | 刷版作成装置 |
| JPH09162257A (ja) * | 1995-12-05 | 1997-06-20 | Metsukusu:Kk | 薄型基板の搬送装置 |
| DE19839924C2 (de) * | 1998-09-02 | 2002-06-20 | Siempelkamp Gmbh & Co Kg G | Vorrichtung zur Abnahme von Folien von einem Folienstapel in einer Stapelstation und zur Ablage der abgenommenen Folien in einer Zusammenlegestation |
| DE19917405B4 (de) * | 1999-04-16 | 2005-04-14 | LTG Mailänder GmbH & Co. KG | Verfahren und Vorrichtung zum Vereinzeln flexibler flächiger Gegenstände |
| DE10101233A1 (de) * | 2001-01-11 | 2002-07-25 | Dieffenbacher Gmbh Maschf | Vorrichtung für das Zusammenlegen von Folien zu einem Schichtpaket |
| JP2002287373A (ja) * | 2001-03-28 | 2002-10-03 | Fuji Photo Film Co Ltd | 給版装置 |
| JP3845005B2 (ja) * | 2001-12-12 | 2006-11-15 | 富士写真フイルム株式会社 | 画像記録材料枚葉装置 |
| JP4454211B2 (ja) * | 2002-08-12 | 2010-04-21 | チメイ オプトエレクトロニクス コーポレーション | 基板搬送ロボットシステム及びこの基板搬送ロボットシステムに用いられる基板搬送容器 |
| EP1428778A1 (en) | 2002-12-10 | 2004-06-16 | Fuji Photo Film Co., Ltd. | Printing plate sucker |
-
2006
- 2006-02-22 EP EP06735608A patent/EP1853501B1/en not_active Not-in-force
- 2006-02-22 WO PCT/US2006/006019 patent/WO2006091558A1/en active Application Filing
- 2006-02-22 JP JP2007557093A patent/JP4926984B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| WO2006091558A1 (en) | 2006-08-31 |
| EP1853501A1 (en) | 2007-11-14 |
| JP2008532076A (ja) | 2008-08-14 |
| EP1853501B1 (en) | 2012-11-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4926984B2 (ja) | プレートハンドリングシステム | |
| EP1055621B1 (en) | An automatic plate feeding system | |
| US7861940B2 (en) | Plate handling system | |
| US5588797A (en) | IC tray handling apparatus and method | |
| US20060071353A1 (en) | Automatic printing plate feeding system | |
| US7381026B1 (en) | Mail traying apparatus | |
| JP7507284B2 (ja) | ロボットハンド、ロボット及びロボットシステム | |
| JP2019043772A (ja) | 荷降し装置、及び荷降し方法 | |
| JP2003015312A (ja) | 印刷版選別搬送装置 | |
| JPH01502866A (ja) | 自動ウェファーローディング方法及び装置 | |
| JP2850474B2 (ja) | 部品供給装置 | |
| KR20220098173A (ko) | 기판 매거진의 로딩 및 언로딩 장치, 기판 매거진 시스템 | |
| JP3638931B2 (ja) | 検体遠心分離システム | |
| WO2021079940A1 (ja) | 荷降し装置、及び、荷降し方法 | |
| JP2008532076A5 (ja) | ||
| TWI835329B (zh) | 堆棧容納結構 | |
| KR100852468B1 (ko) | 로드락 챔버 직결식 로드포트 | |
| US6461085B1 (en) | Sputter pallet loader | |
| TWI829738B (zh) | 收納裝置及基板加工裝置 | |
| US20060138273A1 (en) | Automated roll handling system | |
| JP2022103996A (ja) | テープマウンタ | |
| JPS6213285A (ja) | 厚膜モジユ−ル基板用ロ−ダ・アンロ−ダ | |
| JPH042906Y2 (ja) | ||
| US20220288797A1 (en) | Robot system for object conveying, handling, posturing and processing | |
| KR100254303B1 (ko) | 장치 패키지의 핸들링 방법 및 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090210 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090210 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110905 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110913 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111209 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120117 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120208 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150217 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| LAPS | Cancellation because of no payment of annual fees | ||
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |