JP4898097B2 - メカニカルセンサーおよびそれを用いた分析システム - Google Patents
メカニカルセンサーおよびそれを用いた分析システム Download PDFInfo
- Publication number
- JP4898097B2 JP4898097B2 JP2004097821A JP2004097821A JP4898097B2 JP 4898097 B2 JP4898097 B2 JP 4898097B2 JP 2004097821 A JP2004097821 A JP 2004097821A JP 2004097821 A JP2004097821 A JP 2004097821A JP 4898097 B2 JP4898097 B2 JP 4898097B2
- Authority
- JP
- Japan
- Prior art keywords
- cantilever
- light
- detection
- sensor
- measuring
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Description
試料表面上の各位置での調節量をコンピュータで画面上にマッピングすることによって試料表面の微細な構造を観察することができる。カンチレバーのたわみは、光てこ法でたわみを検出する。たわみ検出器は、半導体レーザーと、2分割のフォトダイオードからなる。半導体レーザーからレーザー光をカンチレバーに照射し、その反射光をフォトダイオードで受光する。カンチレバーがたわむと反射光の角度が変化し、フォトダイオード上のレーザースポットが移動する。このときに分割フォトダイオードの各部分に入射する光量が変化するため、各部分の電気出力の差分を測定することでカンチレバーのたわみを高感度に検出することができる。
また、前記測定手段が、光照射手段と受光手段とからなる構成とした。このような構成とすることで、非接触で前記検出手段と、前記参照手段の形状変化を測定することが可能となる。
また、前記光照射手段から前記検出手段と前記参照手段とに光を照射し、前記検出手段からの反射光と、前記参照手段からの反射光との干渉光を前記受光手段で受光する構成とした。このような構成とすることで、前記測定手段の光軸あわせを容易に行うことが可能となる。
また、前記受光手段が、少なくとも一つのフォトダイオードからなる構成とした。このような構成とすることで、前記検出手段からの反射光と前記参照手段からの反射光との干渉光の強度変化を測定することができる。
また、前記受光手段が、イメージセンサーからなる構成とした。このような構成とすることで、前記検出手段からの反射光と前記参照手段からの反射光がなす干渉パターンを測定することが可能となる。
また、前記光照射手段が、少なくとも一つのレーザー光源からなる構成とした。このような構成とすることで、可干渉性が向上し、測定分解能の向上が可能となる。
また、干渉パターン603内の任意の箇所にフォトダイオードなど受光素子を配置すると、その出力は図6(B)に示すようになる。図6(B)において、横軸は、検出用カンチレバーのたわみと参照用カンチレバーのたわみの差Dh、縦軸は、受光素子の出力の大きさIである。Dhに対するIの変化は、検出に用いる光の波長の1/4毎に周期的に変化する。従って、受光素子の出力を測定することで、その変化から、Dhを求めることが可能となる。
ここで、Dhを測定するための光源と受光器は、少なくとも一組で各反応部をスキャンしてもよいし、反応部702毎に配置してもよい。また、本説明においては一組の検出用カンチレバー704と参照用カンチレバー705毎に液溜部が配置されている構造を示したが、各反応部702の液溜部が結合した構造としてもよい。
102、502 カンチレバー支持部
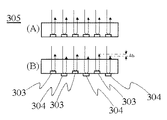
103、403、503、703 参照用カンチレバー
104、404、504、704 検出用カンチレバー
105 カンチレバーセンサー
109 カンチレバー基材
110 反射膜および抗体固定膜
111 抗体
205、405 光源
206 反射鏡
207、407 受光器
208 ビームスプリッタ
701 分析プレート
702 反応部
706 液溜部
1001 XYZトランスレータ
1002 試料ステージ
1003 試料
1004 カンチレバー
1005 カンチレバーのたわみ検出器
1006 コントローラ
1007 コンピュータ
Claims (3)
- 片持ち梁状の複数の検出手段と、片持ち梁状の複数の参照手段と、前記検出手段と前記参照手段との形状変化を測定する測定手段とからなり、固体表面への分子の吸着もしくは温度など環境の変化によって起こる固体の形状変化を測定することにより、分子や環境の変化を検出するメカニカルセンサーにおいて、前記検出手段と前記参照手段とが互いに交互に配置されており、
前記測定手段は、
前記複数の検出手段及び前記複数の参照手段の全てを含むビームスポット(101、501)で光を照射する光照射手段と、
前記検出手段で反射した反射光と前記参照手段で反射した反射光との干渉光を受光する受光手段と、
前記干渉光に対応する干渉光データを用いて前記固体の形状変化を測定する形状変化測定部とを備え、
前記受光手段は、イメージセンサーから構成されており、
前記干渉光データは、前記干渉光の強度データである明線データと前記明線データよりも弱い強度データである暗線データとを備え、
前記形状変化測定部は、前記イメージセンサーにおける前記明線データ及び前記暗線データのいずれか一方のピッチの変化を用いることを特徴とするメカニカルセンサー。 - 請求項1に記載のメカニカルセンサーと、複数の前記検出手段及び複数の前記参照手段を備える液溜部からなる少なくとも一つの反応部とを有し、前記液溜部は測定対象となる液が満たされるものであることを特徴とする分析システム。
- 前記反応部を複数有し、前記検出手段がアレイ状に配置されていることを特徴とする請求項2に記載の分析システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004097821A JP4898097B2 (ja) | 2003-10-31 | 2004-03-30 | メカニカルセンサーおよびそれを用いた分析システム |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003372866 | 2003-10-31 | ||
| JP2003372866 | 2003-10-31 | ||
| JP2004097821A JP4898097B2 (ja) | 2003-10-31 | 2004-03-30 | メカニカルセンサーおよびそれを用いた分析システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005156525A JP2005156525A (ja) | 2005-06-16 |
| JP4898097B2 true JP4898097B2 (ja) | 2012-03-14 |
Family
ID=34741293
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004097821A Expired - Fee Related JP4898097B2 (ja) | 2003-10-31 | 2004-03-30 | メカニカルセンサーおよびそれを用いた分析システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4898097B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101338032B1 (ko) * | 2007-05-04 | 2013-12-09 | 엘지전자 주식회사 | 탐침형 원자현미경 기반 나노정보저장장치 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03123805A (ja) * | 1989-10-09 | 1991-05-27 | Olympus Optical Co Ltd | 原子間力顕微鏡 |
| JPH04179042A (ja) * | 1990-11-13 | 1992-06-25 | Olympus Optical Co Ltd | 走査型プローブ顕微鏡用カンチレバー |
| JPH04188022A (ja) * | 1990-11-22 | 1992-07-06 | Olympus Optical Co Ltd | 変位検出装置 |
| US5280341A (en) * | 1992-02-27 | 1994-01-18 | International Business Machines Corporation | Feedback controlled differential fiber interferometer |
| JP3761906B2 (ja) * | 1992-11-06 | 2006-03-29 | 日立建機株式会社 | 走査プローブ顕微鏡及びその制御誤差の補正方法 |
| DE69309313T2 (de) * | 1993-07-06 | 1997-09-25 | Ibm | Kalorimetrischer sensor |
| US6096559A (en) * | 1998-03-16 | 2000-08-01 | Lockheed Martin Energy Research Corporation | Micromechanical calorimetric sensor |
-
2004
- 2004-03-30 JP JP2004097821A patent/JP4898097B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005156525A (ja) | 2005-06-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1892727B1 (en) | Shape measuring apparatus using an interferometric displacement gauge | |
| KR101161881B1 (ko) | 투명 기판의 결함 검출 검사장치 | |
| JP5112650B2 (ja) | チャックに対する光ビームの位置のドリフトを決定する方法およびシステム | |
| JPH05256641A (ja) | カンチレバー変位検出装置 | |
| KR20090113895A (ko) | 유리시트의 결함 측정장치 | |
| US8345260B2 (en) | Method of detecting a movement of a measuring probe and measuring instrument | |
| US6884981B2 (en) | Diffractive optical position detector | |
| Schulz et al. | Scanning deflectometric form measurement avoiding path-dependent angle measurement errors | |
| JP2022070996A (ja) | 走査型プローブ顕微鏡のための装置および方法 | |
| JP2001116869A (ja) | サンプル検査及び/又は処理装置 | |
| US20120212748A1 (en) | Optical reader systems and methods for microplate position detection | |
| JP5548848B2 (ja) | 検査装置、検査方法、及び半導体装置の製造方法 | |
| JP4898097B2 (ja) | メカニカルセンサーおよびそれを用いた分析システム | |
| KR102646539B1 (ko) | 스캐닝 프로브 현미경 | |
| NL2022264A (en) | Apparatus and methods for determining the position of a target structure on a substrate | |
| CN111398295B (zh) | 一种缺陷检测装置及其方法 | |
| KR101173607B1 (ko) | 생체 물질의 물리적 변화에 대한 실시간 검출이 가능한 바이오 센서 장치 및 센싱 방법 | |
| KR101881752B1 (ko) | 라인빔을 사용하는 결함검출모듈 및 상기 결함검출모듈 어레이를 이용한 결함검출장치 | |
| JP6185701B2 (ja) | 形状測定装置 | |
| JPH0921629A (ja) | 異物評価装置 | |
| JP4143722B2 (ja) | 原子間力/水平力顕微鏡の感度校正方法 | |
| JP5777068B2 (ja) | マスク評価装置 | |
| JP2005147745A (ja) | 近接場散乱光測定装置 | |
| JP2021015027A (ja) | 検査装置及び検査方法 | |
| JPH10213587A (ja) | 走査型プローブ顕微鏡 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070328 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091006 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091110 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20091113 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100223 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100514 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20100528 |
|
| A912 | Removal of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20100702 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111115 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111124 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111226 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4898097 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150106 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |