JP4889281B2 - 自動車用駆動モータ及びモータ駆動制御方法 - Google Patents
自動車用駆動モータ及びモータ駆動制御方法 Download PDFInfo
- Publication number
- JP4889281B2 JP4889281B2 JP2005326954A JP2005326954A JP4889281B2 JP 4889281 B2 JP4889281 B2 JP 4889281B2 JP 2005326954 A JP2005326954 A JP 2005326954A JP 2005326954 A JP2005326954 A JP 2005326954A JP 4889281 B2 JP4889281 B2 JP 4889281B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- magnetic
- field
- rotor
- pole
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 13
- 230000002093 peripheral effect Effects 0.000 claims description 14
- 239000000696 magnetic material Substances 0.000 claims description 12
- 238000001514 detection method Methods 0.000 claims description 10
- 230000002265 prevention Effects 0.000 claims description 6
- 238000004804 winding Methods 0.000 claims description 6
- 230000008878 coupling Effects 0.000 claims 1
- 238000010168 coupling process Methods 0.000 claims 1
- 238000005859 coupling reaction Methods 0.000 claims 1
- 230000004907 flux Effects 0.000 description 70
- 230000001360 synchronised effect Effects 0.000 description 15
- 230000005284 excitation Effects 0.000 description 14
- 230000003313 weakening effect Effects 0.000 description 9
- 238000010586 diagram Methods 0.000 description 8
- 229910000831 Steel Inorganic materials 0.000 description 7
- 239000010959 steel Substances 0.000 description 7
- 229910000576 Laminated steel Inorganic materials 0.000 description 6
- 230000007423 decrease Effects 0.000 description 5
- 230000009471 action Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 230000015572 biosynthetic process Effects 0.000 description 3
- 230000003247 decreasing effect Effects 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 235000012489 doughnuts Nutrition 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical group [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229910052761 rare earth metal Inorganic materials 0.000 description 1
- 150000002910 rare earth metals Chemical class 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 239000002356 single layer Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000011343 solid material Substances 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 238000003786 synthesis reaction Methods 0.000 description 1
Images













Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
Landscapes
- Control Of Motors That Do Not Use Commutators (AREA)
Description
つぎに、本発明をより詳細に説明するため、電気自動車に適用した一実施形態について、図1〜図9にしたがって詳述する。
まず、構成について説明する。図1は電気自動車の駆動系のブロック図であり,同図において、1Aは本発明の自動車用駆動モータであり、モータ軸方向(紙面左右方向)に連結状態(二分割状態)に配設された第1、第2のモータ部2a、2bを備える。なお、両モータ部2a、2bは両端が開放した鋼板等の磁性体の円筒ケース形状のフレーム3内に、フレーム3に接して又は近接して設けられ、フレーム3は磁性体のステータ間磁路体を形成して後述のステータ間の磁路を形成する。
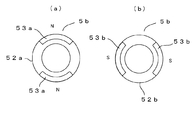
まず、界磁コイル部7が発生する界磁の作用について、図5〜図7の界磁の作用の説明図を参照して説明する。なお、図5〜図7の(a)はロータ5a、5bの連結状態の斜視図であり、(b)、(c)は(a)のロータ5a、5bそれぞれの端面側からみた磁束を示し、それぞれの実線矢印は磁束の方向を示す。また、以下の説明においては、モータ部2a側から界磁コイル部7を見て、時計回転方向の界磁電流を界磁電流(正)と表記し、反時計回転方向の界磁電流を界磁電流(負)と表記する。
第1、第2のロータ5a、5bは、モータ軸51a、51bが磁気的に接続されているので、別個独立に回転しても全体の界磁磁気抵抗は一定であり変化することはない。
この場合、界磁電流(正)に基いて、第2のロータ5bから出て第1のロータ5aに入る向き、すなわち、磁路φ1の磁束に抗する向きの磁束(以下、界磁磁束という)が発生し、第1のロータ5aのN極側の両永久磁石体53a間の磁性体部分は等価的にS磁極となり、第2のロータ5bのS極側の両永久磁石体53b間の磁性体部分は等価的にN磁極となり、図6の(a)に示すように第1のロータ5aのN極側の各永久磁石体53aから出た磁束は磁路φ2を通って両永久磁石体53a間のS極側の磁性体に入るようになり、同様に、第2のロータ5bのN極側の各磁性体部分から出た磁束は磁路φ2と同様の磁路を通ってS極側の両永久磁石体53bに入るようになる。
この場合、界磁電流(負)に基いて、第1のロータ5aから出て第2のロータ5bに入る向き、すなわち、界磁電流(正)の場合と逆向きの界磁コイル磁束が発生し、第1のロータ5aのN極側の両永久磁石体53a間の磁性体部分は等価的にN磁極となり、第2のロータ5bのS極側の両永久磁石体53b間の磁性体部分は等価的にS磁極となる。
つぎに、界磁コイル部7が発生する界磁磁束の変動に基く渦電流損を抑止してモータ効率の一層の向上を図るようにした他の実施形態について、図10〜図12を参照して詳述する。
2a、2b 第1、第2のモータ部
3 磁性体フレーム
4a、4b 第1、第2のステータ
5a、5b 第1、第2のロータ
51a、51b モータ軸
53a、53b 永久磁石体
6 連結部
7 界磁コイル部
8a、8b 回転センサ
9a、9b 駆動輪
12a、12b 三相インバータ
14 単相インバータ
15 接続体
16 渦電流防止体
Claims (7)
- 第1のステータの内側に磁性体の第1のロータを設けて形成され、該第1のロータの周部に円周方向に間隔をとって配設された全ての磁極磁石がN極を外側に向けたN極側永久磁石体で構成された第1のモータ部と、
第2のステータの内側に磁性体の第2のロータを設けて形成され、該第2のロータの周部に円周方向に間隔をとって配設された全ての磁極磁石がS極を外側に向けたS極側永久磁石体で構成された第2のモータ部と、
前記両ロータのモータ軸を相互に独立して回転する状態に連結するとともに磁気的に接続して前記モータ軸方向に磁路を形成する磁性体の連結部と、
前記両ロータ間に前記両モータ部の前記モータ軸が貫通するように前記モータ軸方向の前記磁路に対して巻回され、前記両モータ部に前記モータ軸方向の共通の界磁を発生する界磁コイル部と、
前記両ステータ間の磁路を形成する磁性体のステータ間磁路体とを備え、
前記第1のモータ部の前記モータ軸に左右の駆動輪のいずれか一方が取り付けられ、前記第2のモータ部の前記モータ軸に前記左右の駆動輪のいずれか他方が取り付けられることを特徴とする自動車用駆動モータ。 - 請求項1記載の自動車用駆動モータにおいて、
前記ステータ間磁路体を、前記両ステータを内装した磁性体フレームが形成することを特徴とする自動車用駆動モータ。 - 請求項1記載の自動車用駆動モータにおいて、
前記ステータ間磁路体として前記両ステータの周部の複数個所を橋絡する複数個の接続体を備え、
前記各接続体を前記両モータ部のモータ軸方向の短冊状の複数個の磁性板を貼り合わせた積層磁性体により形成し、
前記積層磁性体の一端部、他端部を前記両モータ部の周部の前記各個所に嵌入したことを特徴とする自動車用駆動モータ。 - 請求項1〜3のいずれかに記載の自動車用駆動モータにおいて、
前記両ロータぞれぞれの前記モータ軸に接する内周部の複数個所に、前記層状磁性体が形成する渦電流防止体を配設したことを特徴とする自動車用駆動モータ。 - 請求項1〜4のいずれかに記載の自動車用駆動モータにおいて、
前記界磁コイル部が円筒形の磁心体にコイルを巻回して形成されることを特徴とする自動車用駆動モータ。 - 請求項1〜5のいずれかに記載の自動車用駆動モータを駆動するモータ駆動制御方法であって、
前記両ロータそれぞれの磁極位置の検出に基いて前記両ステータそれぞれの電流を個別に制御し、
前記両ロータの回転速度の検出に基く前記界磁コイル部の電流制御により前記界磁コイル部が発生する界磁を調整し、
前記両モータ部のモータ電圧が電源電圧近くに上昇する高速回転域のときに、前記界磁により前記両モータ部の磁束を低減して弱め界磁運転の状態にすることを特徴とするモータ駆動制御方法。 - 請求項6記載のモータ駆動制御方法において、
前記両モータ部がそれぞれ三相以上の多相構造であって、
前記両ステータの各相巻き線に前記両モータ部それぞれの多相電源から給電し、前記界磁コイル部に単相電源から給電することを特徴とするモータ駆動制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005326954A JP4889281B2 (ja) | 2005-11-11 | 2005-11-11 | 自動車用駆動モータ及びモータ駆動制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005326954A JP4889281B2 (ja) | 2005-11-11 | 2005-11-11 | 自動車用駆動モータ及びモータ駆動制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007135327A JP2007135327A (ja) | 2007-05-31 |
| JP4889281B2 true JP4889281B2 (ja) | 2012-03-07 |
Family
ID=38156544
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005326954A Expired - Fee Related JP4889281B2 (ja) | 2005-11-11 | 2005-11-11 | 自動車用駆動モータ及びモータ駆動制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4889281B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105048743A (zh) * | 2015-09-07 | 2015-11-11 | 安徽安凯汽车股份有限公司 | 一种双转子驱动电机 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5586275B2 (ja) * | 2010-03-11 | 2014-09-10 | ダイハツ工業株式会社 | モータ |
| DE102010043970A1 (de) * | 2010-11-16 | 2012-05-16 | Robert Bosch Gmbh | Elektrische Maschine für einen Lenkantrieb |
| JP2013027254A (ja) * | 2011-07-25 | 2013-02-04 | Ito Denki Kk | モータ制御システム、制御装置、並びにモータ内蔵ローラと制御装置の組み合わせ |
| CN107294270A (zh) * | 2017-07-19 | 2017-10-24 | 沈阳工业大学 | 一种不对称励磁定子错角双凸极电机及其控制方法 |
| CN107154716B (zh) * | 2017-07-19 | 2023-11-28 | 沈阳工业大学 | 双定子周向错位角电励磁直流电机的控制方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05284698A (ja) * | 1992-03-31 | 1993-10-29 | Nippondenso Co Ltd | 車両用電動機 |
| JPH06351206A (ja) * | 1993-04-14 | 1994-12-22 | Meidensha Corp | ハイブリッド励磁形永久磁石同期回転機 |
| EP0729216A3 (de) * | 1995-02-21 | 1998-03-11 | Siemens Aktiengesellschaft | Hybriderregte Synchronmaschine |
| JP2004072822A (ja) * | 2002-08-01 | 2004-03-04 | Fumio Hamaoka | 電動機 |
-
2005
- 2005-11-11 JP JP2005326954A patent/JP4889281B2/ja not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105048743A (zh) * | 2015-09-07 | 2015-11-11 | 安徽安凯汽车股份有限公司 | 一种双转子驱动电机 |
| CN105048743B (zh) * | 2015-09-07 | 2017-06-20 | 安徽安凯汽车股份有限公司 | 一种双转子驱动电机 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007135327A (ja) | 2007-05-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5605388B2 (ja) | 同期モータ | |
| US7462968B2 (en) | Electric wheel | |
| JP5592848B2 (ja) | 横方向磁束型回転電機及び車輌 | |
| JP4449035B2 (ja) | 電動車両用の永久磁石回転電機 | |
| JP4640422B2 (ja) | ランデルロータ型モータ | |
| US8207645B2 (en) | Magnetic flux controllable rotating electric machine system | |
| US9438151B2 (en) | Transverse flux machine and vehicle | |
| WO2011046070A1 (ja) | 磁束量可変回転電機システム | |
| JP5897298B2 (ja) | ブラシレスモータ制御方法及びブラシレスモータ制御装置並びにブラシレスモータ並びに電動パワーステアリング装置 | |
| JP2008259302A (ja) | 電動機の制御装置 | |
| US20150091403A1 (en) | Transverse flux machine and vehicle | |
| US9787144B2 (en) | Rotating electrical motor using transverse magnetic flux | |
| JP5323592B2 (ja) | 永久磁石回転電機及びそれを用いた電動車両 | |
| JP5612632B2 (ja) | 永久磁石回転電機 | |
| WO2006054676A1 (ja) | 車両駆動システムおよびそれを備える車両 | |
| JP6592525B2 (ja) | 磁石式回転子、磁石式回転子を備える回転電機及び回転電機を備える電気自動車 | |
| JP2001275326A (ja) | モータ | |
| JP4889281B2 (ja) | 自動車用駆動モータ及びモータ駆動制御方法 | |
| JP3347935B2 (ja) | 永久磁石回転電機及びそれを用いた電動車両 | |
| JP5962407B2 (ja) | Ipm型電動回転機 | |
| US9099912B2 (en) | Electromagnetic coupling | |
| JP3171104B2 (ja) | 車両用駆動装置 | |
| US20250158465A1 (en) | Selective permeability rotor structure for interior permanent magnet machine | |
| US20250112512A1 (en) | Reluctance assisted axial flux electric motor | |
| JP2018007493A (ja) | 回転電機とそれを用いた電動駆動システム及び電動車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080612 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110517 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110616 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111213 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111213 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141222 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |