JP4881112B2 - 超音波診断装置及び画像データ生成方法 - Google Patents
超音波診断装置及び画像データ生成方法 Download PDFInfo
- Publication number
- JP4881112B2 JP4881112B2 JP2006252570A JP2006252570A JP4881112B2 JP 4881112 B2 JP4881112 B2 JP 4881112B2 JP 2006252570 A JP2006252570 A JP 2006252570A JP 2006252570 A JP2006252570 A JP 2006252570A JP 4881112 B2 JP4881112 B2 JP 4881112B2
- Authority
- JP
- Japan
- Prior art keywords
- data
- ultrasonic
- reception
- transmission
- dimensional
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52023—Details of receivers
- G01S7/52034—Data rate converters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8993—Three dimensional imaging systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52077—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging with means for elimination of unwanted signals, e.g. noise or interference
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52085—Details related to the ultrasound signal acquisition, e.g. scan sequences
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52085—Details related to the ultrasound signal acquisition, e.g. scan sequences
- G01S7/52095—Details related to the ultrasound signal acquisition, e.g. scan sequences using multiline receive beamforming
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8934—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a dynamic transducer configuration
- G01S15/8938—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a dynamic transducer configuration using transducers mounted for mechanical movement in two dimensions
- G01S15/894—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a dynamic transducer configuration using transducers mounted for mechanical movement in two dimensions by rotation about a single axis
Description
河野俊彦他、"循環器用超音波診断装置のハイフレームレート化の検討"、日本超音波医学会論文集、日本超音波医学会、1989年、第55巻、p.727−728
素子を有した超音波プローブを用い、所定断面に沿った走査方向における並列同時受信に
よって得られる2次元的な超音波データを前記走査方向と交差するスライス方向の複数断
面にて収集し、このとき得られた3次元的な超音波データに基づいて画像データを生成す
る超音波診断装置において、前記走査方向及び前記スライス方向に対する超音波の送信方
向及び受信方向を制御する送受信方向制御手段と、前記送信方向及び受信方向を制御した
超音波の送受信に基づいて得られた前記3次元的な超音波データに基づいてデータを合成
処理し超音波データを生成するデータ合成手段と、前記超音波データに基づいて画像デー
タを生成する画像データ生成手段とを備え、前記送受信方向制御手段は、前記並列同時受
信における送信方向及び受信方向群の走査方向に対する位置を、前記スライス方向ごとに
所定間隔シフトして、前記走査方向に対する超音波走査を行う。
ローブを用い、所定断面に沿った走査方向における並列同時受信によって得られる2次元
的な受信信号を前記走査方向と交差するスライス方向の複数断面にて収集し、このとき得
られた3次元的な受信信号に基づいて画像データを生成する超音波診断装置において、前
記走査方向及び前記スライス方向に対する超音波の送信方向及び受信方向を制御する送受
信方向制御手段と、前記送信方向及び受信方向を制御した超音波の送受信に基づいて得ら
れた前記3次元的な受信信号を合成処理するデータ合成手段と、合成された受信信号に基
づいて画像データを生成する画像データ生成手段とを備え、前記送受信方向制御手段は、
前記並列同時受信における送信方向及び受信方向群の走査方向に対する位置を、前記スラ
イス方向毎に所定間隔シフトして、前記走査方向に対する超音波走査を行なう。
た超音波プローブを用い、所定断面に沿った走査方向における並列同時受信によって得ら
れる2次元的な超音波データを前記走査方向と交差するスライス方向の複数断面にて収集
し、このとき得られた3次元的な超音波データに基づいて画像データを生成する画像デー
タ生成方法であって、送受信方向制御手段が、前記並列同時受信における送信方向及び受
信方向群の走査方向に対する位置を、前記スライス方向ごとに所定間隔シフトして、前記
走査方向に対する超音波走査を行なうと共に、前記断面のスライス方向への移動を行なっ
て3次元的な超音波データを収集するステップと、データ合成手段が、前記走査方向及び
スライス方向に対して前記3次元的な超音波データの合成処理を行なうステップと、前記
データ合成手段が、合成された超音波データの位置情報を前記複数の超音波データの位置
情報に基づいて算出するステップと、ボリュームデータ生成手段が、前記合成された超音
波データをその位置情報に対応させて保存しボリュームデータを生成するステップと、画
像データ生成手段が、前記ボリュームデータを用いて2次元あるいは3次元の画像データ
を生成するステップとを有する。
超音波プローブを用い、所定断面に沿った走査方向における並列同時受信によって得られ
る2次元的な受信信号を前記走査方向と交差するスライス方向の複数断面にて収集し、こ
のとき得られた3次元的な受信信号に基づいて画像データを生成する画像データ生成方法
であって、送受信方向制御手段が、前記並列同時受信における送信方向及び受信方向群の
走査方向に対する位置を、前記スライス方向毎に所定間隔シフトして、前記走査方向に対
する超音波走査を行うと共に、前記断面のスライス方向への移動を行って3次元的な受信
信号を収集するステップと、データ合成手段が、前記走査方向及びスライス方向に対して
前記3次元的な受信信号の合成処理を行うステップと、前記データ合成手段が、合成され
た受信信号の位置情報を前記複数の受信信号の位置情報に基づいて算出するステップと、
超音波データ生成手段が、前記合成された受信信号を処理して超音波データを生成するス
テップと、ボリュームデータ生成手段が、前記超音波データを前記合成された受信信号の
位置情報に対応させて保存しボリュームデータを生成するステップと、画像データ生成手
段が、前記ボリュームデータを用いて2次元あるいは3次元の画像データを生成するステ
ップとを有する。
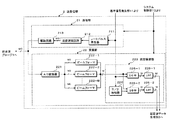
以下では、本発明の第1の実施例における超音波診断装置の構成と各ユニットの動作につき図1乃至図9を用いて説明する。尚、図1は、本実施例における超音波診断装置の全体構成を示すブロック図であり、図2及び図4は、この超音波診断装置を構成する送受信部及び超音波データ生成部のブロック図である。

次に、本実施例における画像データの生成手順につき図10のフローチャートに沿って説明する。尚、以下では、被検体の3次元領域において収集したBモードデータに基づいてボリュームデータを生成し、更に、このボリュームデータを用いてボリュームレンダリング画像データを生成する場合について述べるが、前記3次元領域において収集したカラードプラデータに基づいてボリュームデータを生成してもよい。又、Bモードデータやカラードプラ画像データに基づくボリュームデータを用いてサーフェイスレンダリング画像データやMIP画像データ、更には、MPR画像データ等の画像データを生成しても構わない。
次に、超音波データに対してデータ合成部7が行なう合成処理の変形例につき図11乃至図13を用いて説明する。図11に示した第1の変形例における第1の画像断面の2次元データs1は、方向θ4に対する送信と方向θ1、θ3、θ5及びθ7に対する並列同時受信によって得られた超音波データq(1、1)、q(1、3)、q(1、5)及びq(1、7)、方向θ12に対する送信と方向θ9、θ11、θ13及びθ15に対する並列同時受信によって得られた超音波データq(1、9)、q(1、11)、q(1、13)及びq(1、15)・・・から構成されている。
本実施例における超音波診断装置と上述の第1の実施例における超音波診断装置とは特に超音波データ生成部とデータ合成部において差異がある。本実施例における超音波診断装置の構成と動作につき図14に示したブロック図を用いて説明する。尚、本実施例の超音波診断装置の全体構成を示す図14において、上述の第1の実施例のユニットと同一の動作及び機能を有するユニットは同一の符号を付加し、詳細な説明は省略する。
次に、本実施例における画像データの生成手順につき図15のフローチャートに沿って説明する。当該被検体に対する画像データの生成に先立ち、超音波診断装置200の操作者は、入力部12において被検体情報を入力すると共にボリュームデータや画像データの生成条件を設定し(図15のステップS11)、当該被検体の体表近傍に超音波プローブ1を配置して画像データの生成開始コマンドを入力する(図15のステップS12)。
2…送受信部
21…送信部
22…受信部
3、3a…超音波データ生成部
31、31a…Bモードデータ生成部
32、32a…カラードプラデータ生成部
4…プローブ移動機構部
5…プローブ位置検出部
6…送受信方向制御部
7、7a…データ合成部
71、71a…データ記憶部
72、72a…演算部
8…ボリュームデータ生成部
9…画像データ生成部
10…表示部
11…基準信号発生部
12…入力部
13…システム制御部
100、200…超音波診断装置
Claims (15)
- 超音波の送受信を行う振動素子を有した超音波プローブを用い、所定断面に沿った走査
方向における並列同時受信によって得られる2次元的な超音波データを前記走査方向と交
差するスライス方向の複数断面にて収集し、このとき得られた3次元的な超音波データに
基づいて画像データを生成する超音波診断装置において、
前記走査方向及び前記スライス方向に対する超音波の送信方向及び受信方向を制御する
送受信方向制御手段と、
前記送信方向及び受信方向を制御した超音波の送受信に基づいて得られた前記3次元的
な超音波データに基づいてデータを合成処理し超音波データを生成するデータ合成手段と
、
前記超音波データに基づいて画像データを生成する画像データ生成手段とを備え、
前記送受信方向制御手段は、前記並列同時受信における送信方向及び受信方向群の走査
方向に対する位置を、前記スライス方向の位置が異なる断面ごとに所定間隔シフトして、
前記走査方向に対する超音波走査を行う
ことを特徴とする超音波診断装置。 - 前記送受信方向制御手段は、前記走査方向に対する前記送信方向及び受信方向群の配置
パターンを少なくとも第1のパターンと第2のパターンの2種類有し、前記スライス方向の
断面ごとに前記配置パターンを切り替えることにより前記シフトを行う
ことを特徴とする請求項1に記載の超音波診断装置。 - 前記送受信方向制御手段は、前記並列同時受信における送信方向及び受信方向群の走査
方向に対する位置のシフトを、前記スライス方向の断面位置の移動に連動して行う
ことを特徴とする請求項1または2に記載の超音波診断装置。 - 前記合成された超音波データをその位置情報に対応させて保存しボリュームデータを生
成するボリュームデータ生成手段を備え、前記画像データ生成手段は、前記ボリュームデ
ータに対し所定の処理を行なって2次元画像データあるいは3次元画像データを生成する
ことを特徴とする請求項1乃至3のいずれか1項に記載の超音波診断装置。 - 前記データ合成手段は、前記合成された超音波データの位置情報を前記複数領域の各々
における前記複数の超音波データの位置情報に基づいて算出することを特徴とする請求項
4記載の超音波診断装置。 - 超音波の送受信を行なう振動素子を有した超音波プローブを用い、所定断面に沿った走
査方向における並列同時受信によって得られる2次元的な受信信号を前記走査方向と交差
するスライス方向の複数断面にて収集し、このとき得られた3次元的な受信信号に基づい
て画像データを生成する超音波診断装置において、
前記走査方向及び前記スライス方向に対する超音波の送信方向及び受信方向を制御する送
受信方向制御手段と、
前記送信方向及び受信方向を制御した超音波の送受信に基づいて得られた前記3次元的な
受信信号を合成処理するデータ合成手段と、
合成された受信信号に基づいて画像データを生成する画像データ生成手段とを備え、
前記送受信方向制御手段は、前記並列同時受信における送信方向及び受信方向群の走査方
向に対する位置を、前記スライス方向の位置が異なる断面ごとに所定間隔シフトして、前
記走査方向に対する超音波走査を行なうことを特徴とする超音波診断装置。 - 前記合成された受信信号を信号処理して超音波データを生成する超音波データ生成手段
と、前記超音波データを前記合成された受信信号の位置情報に対応させて保存することに
よりボリュームデータを生成するボリュームデータ生成手段を備え、前記画像データ生成
手段は、前記ボリュームデータに対し所定の処理を行なって2次元画像データあるいは3
次元画像データを生成することを特徴とする請求項6記載の超音波診断装置。 - 前記データ合成手段は、前記合成された受信信号の位置情報を前記複数領域の各々にお
ける前記複数の受信信号の位置情報に基づいて算出し、前記ボリュームデータ生成手段は
、前記超音波データを前記合成された受信信号の位置情報に対応させて保存し前記ボリュ
ームデータを生成することを特徴とする請求項7記載の超音波診断装置。 - 前記送受信方向制御手段は、前記超音波プローブを前記スライス方向に対して揺動ある
いは移動させることにより前記スライス方向に対する超音波の送信方向及び受信方向を制
御することを特徴とする請求項1又は請求項6に記載した超音波診断装置。 - 前記データ合成手段は、前記複数領域の各々における前記複数の超音波データあるいは
受信信号を加算処理することを特徴とする請求項1又は請求項6に記載した超音波診断装
置。 - 前記送受信方向制御手段は、前記走査方向に対する4方向並列同時受信のための制御を
行ない、前記データ合成手段は、前記スライス方向に隣接した2つの超音波データあるい
は受信信号と前記走査方向において前記2つの超音波データあるいは受信信号の各々と隣
接した2つの超音波データあるいは受信信号を合成処理することを特徴とする請求項1又
は請求項6に記載した超音波診断装置。 - 前記送受信方向制御手段は、前記走査方向に対する4方向並列同時受信のための制御を
行ない、前記データ合成手段は、前記スライス方向に近接した4つの超音波データあるい
は受信信号を合成処理することを特徴とする請求項1又は請求項6に記載した超音波診断
装置。 - 前記送受信方向制御手段は、前記走査方向に対する4方向並列同時受信のための制御を
行ない、前記データ合成手段は、前記スライス方向に近接した4つの超音波データあるい
は受信信号と前記走査方向において前記4つの超音波データあるいは受信信号の各々と隣
接した4つの超音波データあるいは受信信号を合成処理することを特徴とする請求項1又
は請求項6に記載した超音波診断装置。 - 超音波の送受信を行なう振動素子を有した超音波プローブを用い、所定断面に沿った走
査方向における並列同時受信によって得られる2次元的な超音波データを前記走査方向と
交差するスライス方向の複数断面にて収集し、このとき得られた3次元的な超音波データ
に基づいて画像データを生成する画像データ生成方法であって、
送受信方向制御手段が、前記並列同時受信における送信方向及び受信方向群の走査方向
に対する位置を、前記スライス方向の位置が異なる断面ごとに所定間隔シフトして、前記
走査方向に対する超音波走査を行なうと共に、前記断面のスライス方向への移動を行なっ
て3次元的な超音波データを収集するステップと、
データ合成手段が、前記走査方向及びスライス方向に対して前記3次元的な超音波データ
の合成処理を行なうステップと、
前記データ合成手段が、合成された超音波データの位置情報を前記複数の超音波データの
位置情報に基づいて算出するステップと、
ボリュームデータ生成手段が、前記合成された超音波データをその位置情報に対応させて
保存しボリュームデータを生成するステップと、
画像データ生成手段が、前記ボリュームデータを用いて2次元あるいは3次元の画像デー
タを生成するステップとを
有することを特徴とする画像データ生成方法。 - 超音波の送受信を行なう振動素子を有した超音波プローブを用い、所定断面に沿った走
査方向における並列同時受信によって得られる2次元的な受信信号を前記走査方向と交差
するスライス方向の複数断面にて収集し、このとき得られた3次元的な受信信号に基づい
て画像データを生成する画像データ生成方法であって、
送受信方向制御手段が、前記並列同時受信における送信方向及び受信方向群の走査方向に
対する位置を、前記スライス方向の位置が異なる断面ごとに所定間隔シフトして、前記走
査方向に対する超音波走査を行うと共に、前記断面のスライス方向への移動を行って3次
元的な受信信号を収集するステップと、
データ合成手段が、前記走査方向及びスライス方向に対して前記3次元的な受信信号の合
成処理を行うステップと、
前記データ合成手段が、合成された受信信号の位置情報を前記複数の受信信号の位置情報
に基づいて算出するステップと、
超音波データ生成手段が、前記合成された受信信号を処理して超音波データを生成するス
テップと、
ボリュームデータ生成手段が、前記超音波データを前記合成された受信信号の位置情報に
対応させて保存しボリュームデータを生成するステップと、
画像データ生成手段が、前記ボリュームデータを用いて2次元あるいは3次元の画像デー
タを生成するステップとを
有することを特徴とする画像データ生成方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006252570A JP4881112B2 (ja) | 2006-09-19 | 2006-09-19 | 超音波診断装置及び画像データ生成方法 |
| US11/857,917 US9316725B2 (en) | 2006-09-19 | 2007-09-19 | Ultrasound diagnostic apparatus and method for acquiring ultrasound data |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006252570A JP4881112B2 (ja) | 2006-09-19 | 2006-09-19 | 超音波診断装置及び画像データ生成方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008073085A JP2008073085A (ja) | 2008-04-03 |
| JP4881112B2 true JP4881112B2 (ja) | 2012-02-22 |
Family
ID=39345781
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006252570A Active JP4881112B2 (ja) | 2006-09-19 | 2006-09-19 | 超音波診断装置及び画像データ生成方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9316725B2 (ja) |
| JP (1) | JP4881112B2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7698948B2 (en) * | 2003-12-02 | 2010-04-20 | Hitachi Medical Corporation | Ultrasonic diagnostic apparatus |
| JP2008229096A (ja) * | 2007-03-22 | 2008-10-02 | Toshiba Corp | 超音波診断装置 |
| JP5627171B2 (ja) * | 2008-06-26 | 2014-11-19 | 株式会社東芝 | 超音波診断装置 |
| US8279705B2 (en) | 2010-10-20 | 2012-10-02 | Kabushiki Kaisha Toshiba | Ultrasonic diagnostic apparatus and ultrasonic transmission/reception method |
| JP2012105959A (ja) * | 2010-10-20 | 2012-06-07 | Toshiba Corp | 超音波診断装置及び超音波送受信方法 |
| US9354204B2 (en) * | 2011-10-14 | 2016-05-31 | General Electric Company | Ultrasonic tomography systems for nondestructive testing |
| WO2016009544A1 (ja) * | 2014-07-17 | 2016-01-21 | 株式会社日立製作所 | 超音波撮像装置 |
| CN107802287B (zh) * | 2017-11-16 | 2020-05-19 | 深圳纯和医药有限公司 | 提高超声诊断仪4d机械探头成像稳定度的方法 |
| US11540812B2 (en) * | 2018-12-21 | 2023-01-03 | General Electric Company | Method and system for increasing effective line density of volume compound ultrasound images |
Family Cites Families (99)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5027658A (en) * | 1986-05-02 | 1991-07-02 | Anderson Forrest L | Three dimensional imaging method and device using ellipsoidal backprojection with arbitrarily shaped pulses |
| JP3090718B2 (ja) * | 1990-07-11 | 2000-09-25 | 株式会社東芝 | 超音波診断装置 |
| JPH05237116A (ja) * | 1991-06-12 | 1993-09-17 | Yokogawa Medical Syst Ltd | 超音波診断装置 |
| US5235982A (en) * | 1991-09-30 | 1993-08-17 | General Electric Company | Dynamic transmit focusing of a steered ultrasonic beam |
| US5318033A (en) * | 1992-04-17 | 1994-06-07 | Hewlett-Packard Company | Method and apparatus for increasing the frame rate and resolution of a phased array imaging system |
| JP3329485B2 (ja) * | 1992-06-15 | 2002-09-30 | 株式会社東芝 | 超音波診断装置 |
| US6005916A (en) * | 1992-10-14 | 1999-12-21 | Techniscan, Inc. | Apparatus and method for imaging with wavefields using inverse scattering techniques |
| US5441052A (en) * | 1992-12-28 | 1995-08-15 | Kabushiki Kaisha Toshiba | Color doppler-type ultrasonic diagnostic apparatus |
| JPH06209941A (ja) * | 1993-01-18 | 1994-08-02 | Toshiba Corp | 超音波診断装置 |
| US5433202A (en) * | 1993-06-07 | 1995-07-18 | Westinghouse Electric Corporation | High resolution and high contrast ultrasound mammography system with heart monitor and boundary array scanner providing electronic scanning |
| JPH078492A (ja) | 1993-06-28 | 1995-01-13 | Toshiba Corp | 超音波診断装置 |
| JPH07265314A (ja) * | 1994-03-31 | 1995-10-17 | Hitachi Medical Corp | 超音波断層装置 |
| US5560362A (en) * | 1994-06-13 | 1996-10-01 | Acuson Corporation | Active thermal control of ultrasound transducers |
| US5555534A (en) * | 1994-08-05 | 1996-09-10 | Acuson Corporation | Method and apparatus for doppler receive beamformer system |
| US5460180A (en) * | 1994-09-30 | 1995-10-24 | Siemens Medical Systems, Inc. | Connection arrangement and method of operation of a 2D array for phase aberration correction |
| US5517995A (en) * | 1994-09-30 | 1996-05-21 | Siemens Medical Systems, Inc. | 2D array for phase aberration correction |
| US5546807A (en) * | 1994-12-02 | 1996-08-20 | Oxaal; John T. | High speed volumetric ultrasound imaging system |
| US5678554A (en) * | 1996-07-02 | 1997-10-21 | Acuson Corporation | Ultrasound transducer for multiple focusing and method for manufacture thereof |
| US5899861A (en) * | 1995-03-31 | 1999-05-04 | Siemens Medical Systems, Inc. | 3-dimensional volume by aggregating ultrasound fields of view |
| JPH09526A (ja) * | 1995-06-22 | 1997-01-07 | Toshiba Corp | 超音波診断装置 |
| US6248073B1 (en) * | 1995-06-29 | 2001-06-19 | Teratech Corporation | Ultrasound scan conversion with spatial dithering |
| US5904652A (en) * | 1995-06-29 | 1999-05-18 | Teratech Corporation | Ultrasound scan conversion with spatial dithering |
| US5573001A (en) * | 1995-09-08 | 1996-11-12 | Acuson Corporation | Ultrasonic receive beamformer with phased sub-arrays |
| EP0883860B1 (en) * | 1996-02-29 | 2006-08-23 | Acuson Corporation | Multiple ultrasound image registration system, method and transducer |
| US5720291A (en) * | 1996-03-22 | 1998-02-24 | Advanced Technology Laboratories, Inc. | Three dimensional medical ultrasonic diagnostic image of tissue texture and vasculature |
| US5680863A (en) * | 1996-05-30 | 1997-10-28 | Acuson Corporation | Flexible ultrasonic transducers and related systems |
| US5673699A (en) * | 1996-05-31 | 1997-10-07 | Duke University | Method and apparatus for abberation correction in the presence of a distributed aberrator |
| JPH10118063A (ja) * | 1996-10-24 | 1998-05-12 | Aloka Co Ltd | 超音波診断装置 |
| US6030344A (en) * | 1996-12-04 | 2000-02-29 | Acuson Corporation | Methods and apparatus for ultrasound image quantification |
| US6086539A (en) * | 1996-12-04 | 2000-07-11 | Acuson Corporation | Methods and apparatus for ultrasound image quantification |
| US6721235B2 (en) * | 1997-02-03 | 2004-04-13 | Teratech Corporation | Steerable beamforming system |
| US6292433B1 (en) * | 1997-02-03 | 2001-09-18 | Teratech Corporation | Multi-dimensional beamforming device |
| US5779641A (en) * | 1997-05-07 | 1998-07-14 | General Electric Company | Method and apparatus for three-dimensional ultrasound imaging by projecting filtered pixel data |
| US5954653A (en) * | 1997-05-07 | 1999-09-21 | General Electric Company | Method and apparatus for automatically enhancing contrast in projected ultrasound image |
| US6126603A (en) * | 1997-05-07 | 2000-10-03 | General Electric Company | Method and apparatus for segmenting color flow mode data using velocity information in three-dimensional ultrasound imaging |
| US5899863A (en) * | 1997-05-07 | 1999-05-04 | General Electric Company | Method and apparatus for segmenting B-mode intensity data using doppler shift data in three-dimensional ultrasound imaging |
| US5904653A (en) * | 1997-05-07 | 1999-05-18 | General Electric Company | Method and apparatus for three-dimensional ultrasound imaging combining intensity data with color flow velocity or power data |
| US5897501A (en) * | 1997-05-07 | 1999-04-27 | General Electric Company | Imaging system with multiplexer for controlling a multi-row ultrasonic transducer array |
| US5840032A (en) * | 1997-05-07 | 1998-11-24 | General Electric Company | Method and apparatus for three-dimensional ultrasound imaging using transducer array having uniform elevation beamwidth |
| US6102864A (en) * | 1997-05-07 | 2000-08-15 | General Electric Company | Three-dimensional ultrasound imaging of velocity and power data using average or median pixel projections |
| US5882309A (en) * | 1997-05-07 | 1999-03-16 | General Electric Company | Multi-row ultrasonic transducer array with uniform elevator beamwidth |
| US5865750A (en) * | 1997-05-07 | 1999-02-02 | General Electric Company | Method and apparatus for enhancing segmentation in three-dimensional ultrasound imaging |
| US6269262B1 (en) * | 1997-06-20 | 2001-07-31 | Hitachi, Ltd. | Biomagnetic field measuring apparatus |
| JP3806229B2 (ja) * | 1997-06-27 | 2006-08-09 | アロカ株式会社 | 超音波診断装置 |
| US5876342A (en) * | 1997-06-30 | 1999-03-02 | Siemens Medical Systems, Inc. | System and method for 3-D ultrasound imaging and motion estimation |
| US6867720B1 (en) * | 1997-10-06 | 2005-03-15 | The Regents Of The University Of Michigan | Beamformed ultrasonic imager with delta-sigma feedback control |
| US5964708A (en) * | 1997-10-06 | 1999-10-12 | The Regents Of The University Of Michigan | Beamformed ultrasonic imager with delta-sigma feedback control |
| US6048312A (en) * | 1998-04-23 | 2000-04-11 | Ishrak; Syed Omar | Method and apparatus for three-dimensional ultrasound imaging of biopsy needle |
| US5934288A (en) * | 1998-04-23 | 1999-08-10 | General Electric Company | Method and apparatus for displaying 3D ultrasound data using three modes of operation |
| US6102858A (en) * | 1998-04-23 | 2000-08-15 | General Electric Company | Method and apparatus for three-dimensional ultrasound imaging using contrast agents and harmonic echoes |
| US6511426B1 (en) * | 1998-06-02 | 2003-01-28 | Acuson Corporation | Medical diagnostic ultrasound system and method for versatile processing |
| US6036646A (en) * | 1998-07-10 | 2000-03-14 | Guided Therapy Systems, Inc. | Method and apparatus for three dimensional ultrasound imaging |
| US6048313A (en) * | 1998-09-17 | 2000-04-11 | Stonger; Kelly A. | Method and apparatus for fractal-based enhancement of ultrasound imaging |
| US5951479A (en) * | 1998-09-29 | 1999-09-14 | General Electric Company | Method and apparatus for synthetic transmit aperture imaging |
| JP3847976B2 (ja) * | 1998-10-14 | 2006-11-22 | 株式会社東芝 | 超音波診断装置 |
| US6059729A (en) * | 1998-10-19 | 2000-05-09 | Stonger; Kelly A. | Method and apparatus for edge enhancement in ultrasound imaging |
| US6183419B1 (en) * | 1999-02-01 | 2001-02-06 | General Electric Company | Multiplexed array transducers with improved far-field performance |
| US6102861A (en) * | 1999-04-23 | 2000-08-15 | General Electric Company | Method and apparatus for three-dimensional ultrasound imaging using surface-enhanced volume rendering |
| US6413219B1 (en) * | 1999-03-31 | 2002-07-02 | General Electric Company | Three-dimensional ultrasound data display using multiple cut planes |
| US7399279B2 (en) * | 1999-05-28 | 2008-07-15 | Physiosonics, Inc | Transmitter patterns for multi beam reception |
| US6682483B1 (en) * | 1999-05-28 | 2004-01-27 | Vuesonix Sensors, Inc. | Device and method for mapping and tracking blood flow and determining parameters of blood flow |
| US7534209B2 (en) * | 2000-05-26 | 2009-05-19 | Physiosonics, Inc. | Device and method for mapping and tracking blood flow and determining parameters of blood flow |
| US6306092B1 (en) * | 1999-09-13 | 2001-10-23 | General Electric Company | Method and apparatus for calibrating rotational offsets in ultrasound transducer scans |
| US6488625B1 (en) * | 1999-09-14 | 2002-12-03 | Ecton, Inc. | Medical diagnostic ultrasound system and method |
| US6312381B1 (en) * | 1999-09-14 | 2001-11-06 | Acuson Corporation | Medical diagnostic ultrasound system and method |
| US6524244B1 (en) * | 1999-09-14 | 2003-02-25 | Ecton Inc. | Medical diagnostic ultrasound system and method |
| US6468213B1 (en) * | 1999-09-14 | 2002-10-22 | Ecton, Inc. | Medical diagnostic ultrasound system and method |
| US6436039B1 (en) * | 1999-09-14 | 2002-08-20 | Ecton, Inc. | Medicial diagnostic ultrasound system and method |
| US6497664B1 (en) * | 1999-09-14 | 2002-12-24 | Ecton, Inc. | Medical diagnostic ultrasound system and method |
| US6325759B1 (en) * | 1999-09-23 | 2001-12-04 | Ultrasonix Medical Corporation | Ultrasound imaging system |
| US6277075B1 (en) * | 1999-11-26 | 2001-08-21 | Ge Medical Systems Global Technology Company, Llc | Method and apparatus for visualization of motion in ultrasound flow imaging using continuous data acquisition |
| US6457365B1 (en) * | 2000-02-09 | 2002-10-01 | Endosonics Corporation | Method and apparatus for ultrasonic imaging |
| US6530885B1 (en) * | 2000-03-17 | 2003-03-11 | Atl Ultrasound, Inc. | Spatially compounded three dimensional ultrasonic images |
| US6423004B1 (en) * | 2000-05-30 | 2002-07-23 | Ge Medical Systems Global Technology Company, Llc | Real-time ultrasound spatial compounding using multiple angles of view |
| US6464638B1 (en) * | 2000-10-05 | 2002-10-15 | Koninklijke Philips Electronics N.V. | Ultrasound imaging system and method for spatial compounding |
| JP3961209B2 (ja) * | 2000-10-10 | 2007-08-22 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 超音波撮影装置 |
| US6537219B2 (en) * | 2001-04-04 | 2003-03-25 | Koninklijke Philips Electronics N.V. | Static focus ultrasound apparatus and method |
| US6685644B2 (en) * | 2001-04-24 | 2004-02-03 | Kabushiki Kaisha Toshiba | Ultrasound diagnostic apparatus |
| US7044913B2 (en) * | 2001-06-15 | 2006-05-16 | Kabushiki Kaisha Toshiba | Ultrasonic diagnosis apparatus |
| US6468218B1 (en) * | 2001-08-31 | 2002-10-22 | Siemens Medical Systems, Inc. | 3-D ultrasound imaging system and method |
| US7141020B2 (en) * | 2002-02-20 | 2006-11-28 | Koninklijke Philips Electronics N.V. | Portable 3D ultrasound system |
| WO2003075769A1 (en) * | 2002-03-08 | 2003-09-18 | University Of Virginia Patent Foundation | An intuitive ultrasonic imaging system and related method thereof |
| US7314447B2 (en) * | 2002-06-27 | 2008-01-01 | Siemens Medical Solutions Usa, Inc. | System and method for actively cooling transducer assembly electronics |
| JP3987388B2 (ja) * | 2002-07-05 | 2007-10-10 | 松下電器産業株式会社 | 超音波診断装置 |
| WO2004062467A2 (en) * | 2002-12-31 | 2004-07-29 | John Herbert Cafarella | Multi-sensor breast tumor detection |
| US6749569B1 (en) * | 2003-01-07 | 2004-06-15 | Esaote S.P.A. | Method and apparatus for ultrasound imaging |
| US20040158154A1 (en) * | 2003-02-06 | 2004-08-12 | Siemens Medical Solutions Usa, Inc. | Portable three dimensional diagnostic ultrasound imaging methods and systems |
| US20050277835A1 (en) * | 2003-05-30 | 2005-12-15 | Angelsen Bjorn A | Ultrasound imaging by nonlinear low frequency manipulation of high frequency scattering and propagation properties |
| US8038616B2 (en) * | 2003-05-30 | 2011-10-18 | Surf Technology As | Acoustic imaging by nonlinear low frequency manipulation of high frequency scattering and propagation properties |
| WO2004110279A1 (en) * | 2003-06-12 | 2004-12-23 | Bracco Research Sa | Blood flow estimates through replenishment curve fitting in ultrasound contrast imaging |
| US6966878B2 (en) * | 2003-08-28 | 2005-11-22 | Ge Medical Systems Global Technology Company, Llc | Method and apparatus for obtaining a volumetric scan of a periodically moving object |
| US6980844B2 (en) * | 2003-08-28 | 2005-12-27 | Ge Medical Systems Global Technology Company | Method and apparatus for correcting a volumetric scan of an object moving at an uneven period |
| JP4181007B2 (ja) * | 2003-10-14 | 2008-11-12 | アロカ株式会社 | 超音波診断装置 |
| KR100896304B1 (ko) * | 2004-04-26 | 2009-05-07 | 가부시끼가이샤 도시바 | 3차원 초음파 검사 장치 |
| US7470232B2 (en) * | 2004-05-04 | 2008-12-30 | General Electric Company | Method and apparatus for non-invasive ultrasonic fetal heart rate monitoring |
| JP2006204621A (ja) * | 2005-01-28 | 2006-08-10 | Toshiba Corp | 超音波画像診断装置および超音波画像診断装置の制御プログラム |
| JP4772338B2 (ja) * | 2005-02-21 | 2011-09-14 | 株式会社東芝 | 超音波診断装置 |
| US7874988B2 (en) * | 2005-08-09 | 2011-01-25 | Kabushiki Kaisha Toshiba | Ultrasonic diagnostic apparatus and ultrasonic transmission method |
| JP2008253549A (ja) * | 2007-04-05 | 2008-10-23 | Toshiba Corp | 超音波診断装置 |
-
2006
- 2006-09-19 JP JP2006252570A patent/JP4881112B2/ja active Active
-
2007
- 2007-09-19 US US11/857,917 patent/US9316725B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US9316725B2 (en) | 2016-04-19 |
| JP2008073085A (ja) | 2008-04-03 |
| US20080154133A1 (en) | 2008-06-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11944500B2 (en) | Determining material stiffness using multiple aperture ultrasound | |
| JP4881112B2 (ja) | 超音波診断装置及び画像データ生成方法 | |
| US7874988B2 (en) | Ultrasonic diagnostic apparatus and ultrasonic transmission method | |
| JP4958348B2 (ja) | 超音波撮像装置 | |
| JP4969985B2 (ja) | 超音波診断装置、及び超音波診断装置の制御プログラム | |
| JP2008514264A (ja) | 乳房の超音波画像診断を高精度で行う方法および装置 | |
| JPH06125908A (ja) | 超音波診断装置 | |
| JP2000107182A (ja) | 超音波診断装置 | |
| JP2008307087A (ja) | 超音波診断装置 | |
| JP2008253549A (ja) | 超音波診断装置 | |
| JP2007038016A (ja) | 3次元超音波診断装置 | |
| JP2009061086A (ja) | 超音波診断装置、並びに、画像処理方法及びプログラム | |
| JP2011115457A (ja) | 超音波診断装置及び輝度変化曲線表示用制御プログラム | |
| KR20150118493A (ko) | 초음파 장치 및 그 제어 방법 | |
| JP2005342194A (ja) | 超音波診断装置 | |
| JP2006223736A (ja) | 超音波診断装置 | |
| JP5627171B2 (ja) | 超音波診断装置 | |
| JP2007135994A (ja) | 超音波診断装置及び超音波画像データ生成方法 | |
| JP4772338B2 (ja) | 超音波診断装置 | |
| JP2005143733A (ja) | 超音波診断装置、3次元画像データ表示装置及び3次元画像データ表示方法 | |
| JP5016782B2 (ja) | 超音波診断装置 | |
| JP4895365B2 (ja) | 超音波診断装置及び超音波送信方法 | |
| JP4987503B2 (ja) | 超音波診断装置、画像データ表示装置及び画像データ表示用制御プログラム | |
| KR20150118732A (ko) | 초음파 장치 및 그 제어 방법 | |
| JP6188393B2 (ja) | 超音波診断装置及び制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090911 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110822 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110830 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111014 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111108 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111202 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4881112 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141209 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313115 Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |