JP4866951B2 - 測位組み合わせ決定システム - Google Patents
測位組み合わせ決定システム Download PDFInfo
- Publication number
- JP4866951B2 JP4866951B2 JP2009214030A JP2009214030A JP4866951B2 JP 4866951 B2 JP4866951 B2 JP 4866951B2 JP 2009214030 A JP2009214030 A JP 2009214030A JP 2009214030 A JP2009214030 A JP 2009214030A JP 4866951 B2 JP4866951 B2 JP 4866951B2
- Authority
- JP
- Japan
- Prior art keywords
- positioning
- positioning accuracy
- accuracy
- influence parameter
- combination
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
- G01S5/021—Calibration, monitoring or correction
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/40—Correcting position, velocity or attitude
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/48—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system
- G01S19/485—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system whereby the further system is an optical system or imaging system
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Automation & Control Theory (AREA)
- Navigation (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
詳細は、後記する。
まず、本発明の実施形態となる測位組み合わせ決定システムの構成について、図1を参照して説明する。
測位組み合わせ決定システム1は、測位精度影響パラメータ地図作成手段2、測位精度データベース作成手段3、対象走行環境入力手段4、測位組み合わせ候補提示手段5、測位手段‐測位精度影響パラメータ対応記憶手段6、測位精度影響パラメータ地図記憶手段7、測位精度影響パラメータ取得手段8、測位精度データベース記憶手段9、測位精度予測手段10、目標精度入力手段11、予測測位精度評価手段12から構成する。
測位精度影響パラメータ地図作成手段2は、測位精度影響パラメータ地図記憶手段7が記憶する測位精度影響パラメータ地図101を作成する手段である。なお、測位精度影響パラメータ地図101とは、所定の方法で外部の装置(例:通信可能に接続した装置)から読み込んだ地図データに測位精度影響パラメータを含ませた地図データである。また、測位精度影響パラメータとは、各測位手段の測位精度に影響する走行環境のパラメータであり、環境を観測することによって数値として求める。これらの詳細については後述する。
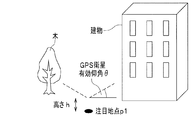
前述のとおり、GPSを用いた測位手段に対応する測位精度影響パラメータである開空率sは、場所毎に異なる値を持つ。よって、対象走行環境入力手段4から入力される対象走行環境を、例えば10m四方のグリッドで区切り、各グリッド中心において開空率を求めて測位精度影響パラメータ地図101に記憶する。あるいは、各グリッド四隅における開空率の平均を記憶する。なお、グリッドのサイズ、即ちグリッド幅iは、10mに限定するものではなく、任意の数値を用いる。ただし、グリッド幅iは、測位組み合わせ決定システム1が対象としている自律移動車や物流搬送ロボットなどのビークルのサイズの10倍以下であることが望ましい。これは、ビークルが移動する経路rの幅は、おおむねビークルのサイズの10倍以下であることによる。例えば国土交通省によれば、自動車の横幅が2m程度であり、片側2車線である幹線道路の横幅が20m程度である。もって、ビークルが移動する経路rを測位精度影響パラメータ地図101上で表現するためには、グリッド幅iはビークルのサイズの10倍以下であることが望ましい。即ち、例えばビークルのサイズが2m四方の場合は、グリッド幅iは20m以下であることが好適である。
ここで、測位組み合わせ決定システム1を使用する際の処理手順を説明する。測位組み合わせ決定システム1の処理手順は、準備段階と運用段階の2つに分割される。もって、それぞれの段階における処理手順を、別個に説明する。
次に、測位組み合わせ決定システム1の変形例となる、測位精度影響パラメータを用いない測位組み合わせ決定システム1a(1)について説明する。測位精度影響パラメータを用いない測位組み合わせ決定システム1aは、前述した測位組み合わせ決定システム1よりも簡単な構成となるが、目標精度を達成可能な測位手段の組み合わせを決定するための、運用段階の処理に必要な費用と時間のコストが、測位組み合わせ決定システム1と比較して低くなる点で有効である。もって、従来技術よりは低コストで、目標精度を達成可能な測位手段の組み合わせを決定できる。
測位精度データベース作成手段3aは、前述した測位精度データベース作成手段3の変形であり、測位精度データベース記憶手段9aが記憶する測位精度データベース102cを作成する手段である。なお、測位精度データベース102cは、測位精度データベース102と同等の機能を有するが、そのデータ形式は、前述した測位精度データベース作成手段3が作成する測位精度データベース102のデータ形式とは異なり、(各測位精度影響パラメータではなく)各位置における各測位手段の測位精度を格納したデータ形式である。
1a 測位組み合わせ決定システム
2 測位精度影響パラメータ地図作成手段
3 測位精度データベース作成手段
3a 測位精度データベース作成手段
4 対象走行環境入力手段
5 測位組み合わせ候補提示手段
6 測位手段‐測位精度影響パラメータ対応記憶手段
7 測位精度影響パラメータ地図記憶手段
8 測位精度影響パラメータ取得手段
9 測位精度データベース記憶手段
9a 測位精度データベース記憶手段
10 測位精度予測手段
10a 測位精度予測手段
11 目標精度入力手段
12 予測測位精度評価手段
13 複数測位手段
14 高精度自己位置取得手段(位置センサ)
15 測位精度算出手段
16 測位精度影響パラメータ参照手段
17 測位精度データベース構築手段
17a 測位精度データベース構築手段
18 プローブ車両
Claims (9)
- ビークルで測位を行うときに用いる1以上の測位手段の組み合わせを決定する測位組み合わせ決定システムにおいて、
前記測位手段が用いるランドマークと、前記測位手段による測位の測位精度に影響を及ぼす測位精度影響パラメータとを対応付けた対応情報と、
前記測位精度影響パラメータが示す値を含む地図データである測位精度影響パラメータ地図と、
前記測位精度影響パラメータが示す値と前記測位精度との関係を示す測位精度データベースと、を記憶する記憶部と、
入力部から、前記ビークルの走行環境と、前記測位手段の組み合わせ候補とを取得する制御と、
前記対応情報により、前記組み合わせ候補に係わる測位手段が用いるランドマークに対応付けられた測位精度影響パラメータを特定する制御と、
前記測位精度影響パラメータ地図により、前記走行環境において前記特定した測位精度影響パラメータが示す値を特定する制御と、
前記測位精度データベースを参照して、前記特定した測位精度影響パラメータが示す値に対する測位精度を、前記組み合わせ候補に係わる測位手段ごとに予測する制御と、
前記予測した測位精度のいずれかが、前記入力部から入力した目標精度以上であれば、前記組み合わせ候補を、前記測位手段の組み合わせとして決定する制御と、を実行する制御部と、を有する
ことを特徴とする測位組み合わせ決定システム。 - 前記制御部は、
前記測位手段による測位の測位精度を算出するのに十分な精度で自己の位置を求める位置センサを用いることにより、前記測位精度と前記測位精度影響パラメータが示す値との関係を求めて前記測位精度データベースを作成する制御、を実行する
ことを特徴とする請求項1に記載の測位組み合わせ決定システム。 - 前記制御部は、
前記走行環境の3次元形状、または前記走行環境の画像の少なくとも一方を、ネットワークを介して他の計算機から取得し、前記取得した3次元形状または前記画像の少なくとも一つに基づいて幾何計算によって前記測位精度影響パラメータ地図を作成する制御、を実行する
ことを特徴とする請求項1に記載の測位組み合わせ決定システム。 - 前記測位精度影響パラメータ地図は、
前記走行環境を区切る所定のサイズのグリッドを有する第1のデータ形式、前記走行環境に存在する道を区切る所定のサイズの区間を有する第2のデータ形式、前記測位手段が用いるランドマークの位置で前記走行環境に存在する道を区切る区間を有する第3のデータ形式のいずれかが、前記測位手段ごとに設定され、前記第1のデータ形式、前記第2のデータ形式、前記第3のデータ形式のいずれかのデータ形式で前記測位精度影響パラメータが示す値を含む
ことを特徴とする請求項1に記載の測位組み合わせ決定システム。 - 前記第1のデータ形式のグリッドのサイズ、また前記第2のデータ形式の区間のサイズは、前記ビークルの大きさの10倍以下である
ことを特徴とする請求項4に記載の測位組み合わせ決定システム。 - 前記測位精度影響パラメータは、前記測位手段が用いるランドマーク同士の間隔距離である
ことを特徴とする請求項1に記載の測位組み合わせ決定システム。 - 前記測位精度データベースは、
前記測位精度影響パラメータが示す値と前記測位精度との関係を関数で示す第1の関係形式、またはルックアップテーブルで示す第2の関係形式のいずれかにより、前記測位手段ごとに記憶されている
ことを特徴とする請求項1に記載の測位組み合わせ決定システム。 - 前記対応情報は、さらに、
前記測位手段による測位のセンシング方法と、前記センシング方法により測位したときの前記測位精度を補正する補正式とを対応付けており、
前記制御部は、
前記測位精度データベースを参照して、前記特定した測位精度影響パラメータが示す値に対する測位精度を、前記補正式による補正を加味して、前記組み合わせ候補に係わる測位手段ごとに予測する制御、を実行する
ことを特徴とする請求項1に記載の測位組み合わせ決定システム。 - ビークルで測位を行うときに用いる1以上の測位手段の組み合わせを決定する測位組み合わせ決定システムにおいて、
前記ビークルの走行環境の各位置と測位精度との関係を示す測位精度データベースを記憶する記憶部と、
入力部から、前記走行環境と、前記測位手段の組み合わせ候補とを取得する制御と、
前記測位精度データベースを参照して、前記走行環境の各位置に対する測位精度を、前記組み合わせ候補に係わる測位手段ごとに予測する制御と、
前記予測した測位精度のいずれかが、前記入力部から入力した目標精度以上であれば、前記組み合わせ候補を、前記測位手段の組み合わせとして決定する制御と、を実行する制御部と、を有する
ことを特徴とする測位組み合わせ決定システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009214030A JP4866951B2 (ja) | 2009-09-16 | 2009-09-16 | 測位組み合わせ決定システム |
| US12/868,128 US8712687B2 (en) | 2009-09-16 | 2010-08-25 | Determining system for localization methods combination |
| EP10008849.1A EP2299290B1 (en) | 2009-09-16 | 2010-08-25 | Determining system for localization methods combination |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009214030A JP4866951B2 (ja) | 2009-09-16 | 2009-09-16 | 測位組み合わせ決定システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011064523A JP2011064523A (ja) | 2011-03-31 |
| JP4866951B2 true JP4866951B2 (ja) | 2012-02-01 |
Family
ID=43513916
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009214030A Active JP4866951B2 (ja) | 2009-09-16 | 2009-09-16 | 測位組み合わせ決定システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8712687B2 (ja) |
| EP (1) | EP2299290B1 (ja) |
| JP (1) | JP4866951B2 (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8200354B2 (en) * | 2006-04-21 | 2012-06-12 | The Boeing Company | Assembly task verification system and method |
| DE102011111342B3 (de) * | 2011-05-31 | 2012-12-06 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren zur Positionsbestimmung von sich bewegenden Objekten |
| CN103717995B (zh) * | 2011-08-29 | 2016-05-11 | 株式会社日立制作所 | 监视装置、监视系统及监视方法 |
| US20140297090A1 (en) * | 2011-11-11 | 2014-10-02 | Hitachi, Ltd. | Autonomous Mobile Method and Autonomous Mobile Device |
| US8825371B2 (en) | 2012-12-19 | 2014-09-02 | Toyota Motor Engineering & Manufacturing North America, Inc. | Navigation of on-road vehicle based on vertical elements |
| KR102096398B1 (ko) * | 2013-07-03 | 2020-04-03 | 삼성전자주식회사 | 자율 이동 로봇의 위치 인식 방법 |
| JP6380936B2 (ja) * | 2015-03-30 | 2018-08-29 | シャープ株式会社 | 移動体及びシステム |
| US11340072B2 (en) * | 2017-03-27 | 2022-05-24 | Sony Corporation | Information processing apparatus, information processing method, and recording medium |
| JP6804806B2 (ja) * | 2017-07-25 | 2020-12-23 | 日本電信電話株式会社 | 測位精度情報算出装置及び測位精度情報算出方法 |
| DE102017118078A1 (de) | 2017-08-09 | 2019-02-14 | Safran Electronics & Defense | Lokalisationseinrichtung für ein Kraftfahrzeug, Fahrerassistenzeinrichtung, Kraftfahrzeug sowie Verfahren zum Lokalisieren eines Kraftfahrzeugs |
| CN107631731A (zh) * | 2017-09-26 | 2018-01-26 | 重庆市智权之路科技有限公司 | 智能医用设备安全行驶路径规划提取方法 |
| US11766785B2 (en) * | 2018-06-29 | 2023-09-26 | Noiseout, Inc. | Automated testing system |
| CN112660148B (zh) * | 2019-09-30 | 2022-09-02 | 阿波罗智能技术(北京)有限公司 | 确定车辆的调头路径的方法、装置、设备和介质 |
| JP6941212B2 (ja) * | 2019-10-28 | 2021-09-29 | ソフトバンク株式会社 | 画像解析システム、画像解析方法、および画像解析プログラム |
| EP4071740A4 (en) * | 2019-12-04 | 2023-12-06 | Pioneer Corporation | INFORMATION PROCESSING DEVICE, CONTROL METHOD, PROGRAM AND STORAGE MEDIUM |
| JP7520332B2 (ja) * | 2021-06-08 | 2024-07-23 | 株式会社アドイン研究所 | 森林用の情報処理装置、情報処理システム、及び、情報処理方法 |
| CN113408157B (zh) * | 2021-08-18 | 2021-11-26 | 北京赛目科技有限公司 | 无人驾驶仿真系统的世界坐标与道路坐标转换方法及装置 |
| DE102021126288A1 (de) | 2021-10-11 | 2023-04-13 | Cariad Se | Verfahren und Vorrichtung zum Bestimmen einer Eigenposition eines Fahrzeugs |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4806940A (en) * | 1986-04-30 | 1989-02-21 | Honeywell Inc. | Navigation mode selection apparatus |
| JPH07229750A (ja) * | 1994-02-22 | 1995-08-29 | Zanabui Informatics:Kk | 車両用ナビゲーション装置 |
| US5751576A (en) * | 1995-12-18 | 1998-05-12 | Ag-Chem Equipment Co., Inc. | Animated map display method for computer-controlled agricultural product application equipment |
| US5839088A (en) * | 1996-08-22 | 1998-11-17 | Go2 Software, Inc. | Geographic location referencing system and method |
| JP4486737B2 (ja) | 2000-07-14 | 2010-06-23 | アジア航測株式会社 | モービルマッピング用空間情報生成装置 |
| JP3788328B2 (ja) * | 2001-11-27 | 2006-06-21 | 株式会社デンソー | ナビゲーションシステム |
| DE60205756T2 (de) | 2002-10-23 | 2006-06-14 | Siemens Ag | Verfahren und Vorrichtung zur Erzeugung eines GPS Simulationsszenarios |
| JP3968429B2 (ja) | 2003-01-16 | 2007-08-29 | 独立行政法人産業技術総合研究所 | 位置情報処理装置 |
| JP2008530531A (ja) * | 2005-02-07 | 2008-08-07 | シーメンス ヴィディーオー オートモーティヴ コーポレイション | ナビゲーション・システム |
| US7299056B2 (en) * | 2005-02-23 | 2007-11-20 | Deere & Company | Vehicular navigation based on site specific sensor quality data |
| JP4946072B2 (ja) | 2006-01-24 | 2012-06-06 | 朝日航洋株式会社 | 樹頂探索方法、装置及びプログラム |
| KR101388133B1 (ko) | 2007-02-16 | 2014-04-23 | 삼성전자주식회사 | 2차원 실사 영상으로부터 3차원 모델을 생성하는 방법 및장치 |
| US20100138147A1 (en) * | 2007-05-24 | 2010-06-03 | T Siobbel Stephen | Positioning device and method to determine a position using an absolute positioning system and a relative positioning system, computer program and a data carrier |
| JP5338044B2 (ja) | 2007-07-09 | 2013-11-13 | 朝日航洋株式会社 | 3次元形状抽出装置、方法及びプログラム |
| JP5254104B2 (ja) * | 2009-03-27 | 2013-08-07 | Kddi株式会社 | 位置情報取得装置、位置情報取得システム、位置情報取得方法およびプログラム |
-
2009
- 2009-09-16 JP JP2009214030A patent/JP4866951B2/ja active Active
-
2010
- 2010-08-25 EP EP10008849.1A patent/EP2299290B1/en active Active
- 2010-08-25 US US12/868,128 patent/US8712687B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011064523A (ja) | 2011-03-31 |
| US20110066303A1 (en) | 2011-03-17 |
| EP2299290A3 (en) | 2014-09-24 |
| EP2299290B1 (en) | 2016-01-06 |
| EP2299290A2 (en) | 2011-03-23 |
| US8712687B2 (en) | 2014-04-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4866951B2 (ja) | 測位組み合わせ決定システム | |
| Kim et al. | Robust vehicle localization using entropy-weighted particle filter-based data fusion of vertical and road intensity information for a large scale urban area | |
| EP3150963B1 (en) | Indexing routes using similarity hashing | |
| JP4934167B2 (ja) | 位置検出装置および位置検出プログラム | |
| EP3648003B1 (en) | Method and apparatus for predicting feature decay using variational auto-encoders | |
| US20170146360A1 (en) | Road Density Calculation | |
| US10928819B2 (en) | Method and apparatus for comparing relevant information between sensor measurements | |
| US9738279B2 (en) | Method for determining a lane course of a lane | |
| EP3640587A1 (en) | Method and apparatus for iteratively establishing object position | |
| EP2735846B1 (en) | Method and device for generating intersection guidance information | |
| CN111351502B (zh) | 用于从透视图生成环境的俯视图的方法,装置和计算机程序产品 | |
| US9292800B2 (en) | Statistical estimation of origin and destination points of trip using plurality of types of data sources | |
| US11193789B2 (en) | Method, apparatus, and computer program product for identifying at-risk road infrastructure | |
| US11353328B2 (en) | Navigation system, apparatus and method for associating a probe point with a road segment | |
| JP2007333652A (ja) | 測位装置、ナビゲーションシステム | |
| US10409842B2 (en) | Storage medium, map information processing apparatus, and data generation method | |
| CN110375763B (zh) | 搜索兴趣点的方法、装置及智能终端 | |
| JP2019174191A (ja) | データ構造、情報送信装置、制御方法、プログラム及び記憶媒体 | |
| WO2019188874A1 (ja) | データ構造、情報処理装置、及び地図データ生成装置 | |
| JP6715706B2 (ja) | 現在位置推定装置、地図調査支援装置、方法、及びプログラム | |
| Forssell et al. | Map-aided positioning system | |
| KR102677509B1 (ko) | 지하시설물에 대한 3차원 정보 취득이 가능한 지하공간 통합지도 관리 시스템 및 그를 이용한 지하공간 통합지도 관리 방법 | |
| JP2013160731A (ja) | ナビゲーション装置 | |
| JP6142478B2 (ja) | 地図データベースのデータベース構造、及びナビゲーション装置 | |
| JP2019021114A (ja) | 位置特定プログラム、位置特定装置、及び位置特定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110801 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111013 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111018 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111114 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141118 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4866951 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |