JP4855902B2 - 生体観測システム - Google Patents
生体観測システム Download PDFInfo
- Publication number
- JP4855902B2 JP4855902B2 JP2006306975A JP2006306975A JP4855902B2 JP 4855902 B2 JP4855902 B2 JP 4855902B2 JP 2006306975 A JP2006306975 A JP 2006306975A JP 2006306975 A JP2006306975 A JP 2006306975A JP 4855902 B2 JP4855902 B2 JP 4855902B2
- Authority
- JP
- Japan
- Prior art keywords
- analysis data
- unit
- shape
- analysis
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000003780 insertion Methods 0.000 claims description 201
- 230000037431 insertion Effects 0.000 claims description 201
- 238000012545 processing Methods 0.000 claims description 61
- 238000005452 bending Methods 0.000 claims description 10
- 238000001514 detection method Methods 0.000 description 28
- 238000012937 correction Methods 0.000 description 14
- 238000003384 imaging method Methods 0.000 description 11
- 238000004891 communication Methods 0.000 description 10
- 230000007423 decrease Effects 0.000 description 10
- 238000000034 method Methods 0.000 description 10
- 230000008569 process Effects 0.000 description 10
- 238000010586 diagram Methods 0.000 description 9
- 238000005286 illumination Methods 0.000 description 6
- 210000002429 large intestine Anatomy 0.000 description 3
- 230000004044 response Effects 0.000 description 2
- 238000011282 treatment Methods 0.000 description 2
- 101000860173 Myxococcus xanthus C-factor Proteins 0.000 description 1
- 210000000436 anus Anatomy 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 210000001035 gastrointestinal tract Anatomy 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images







Landscapes
- Endoscopes (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
Description
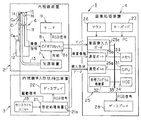
図1から図5は、本発明の第1の実施形態に係るものである。図1は、本発明の第1の実施形態に係る生体観測システムの要部の構成の一例を示す図である。図2は、図1の内視鏡挿入形状検出装置において検出される、図1の内視鏡の挿入部に設けられたソースコイルの座標を示す図である。図3Aは、図1の内視鏡挿入形状検出装置において生成される、挿入形状データの概要を示す図である。図3Bは、図3Aのフレームデータ各々に含まれるデータ及び情報の概要を示す図である。図3Cは、図3Bのコイル座標データに含まれる3次元座標データの概要を示す図である。図4は、図1の画像処理装置により実現される機能ブロックの構成等を示す図である。図5は、図4に示す構成を有する各ブロックにより行われる処理の流れを示す説明図である。
内視鏡装置2は、被験者の内部に存在する大腸等に挿入可能であるとともに、該被検体の内部の被写体を撮像し、撮像信号として出力する内視鏡6と、該被写体を照明するための照明光を内視鏡6に対して供給する光源装置7と、内視鏡6から出力される撮像信号に対して信号処理を行い、映像信号として出力するビデオプロセッサ8と、ビデオプロセッサ8から出力される映像信号に基づき、内視鏡6により撮像された被写体の像を内視鏡観察画像として表示するモニタ9と、を有して構成されている。
成するための信号処理を行う。そして、ビデオプロセッサ8は、前記信号処理により生成した映像信号である、例えばRGB信号をモニタ9に出力する。そして、モニタ9の表示面には、撮像素子16において撮像された被写体の像が内視鏡観察画像として表示される。
内視鏡挿入形状検出装置3の形状処理装置21は、内視鏡6の撮像素子16から1フレーム分の撮像信号が出力されるタイミングに応じ、内視鏡6の挿入部11に内蔵されたM個のソースコイルC0〜CM−1の3次元座標を含む挿入形状データを生成する。また、形状処理装置21は、前記挿入形状データを画像処理装置4へ出力するとともに、前記挿入形状データに基づいて挿入部11の挿入形状の画像を生成し、該挿入形状の画像をディスプレイ22へ出力する。
挿入部11の最も先端側に配置されたソースコイルC0の移動速度と、挿入部11の最も基端側に配置されたソースコイルCM−1の移動速度とを有する解析データ33bを生成するとともに、生成した該解析データ33bをメモリ33に順次格納する。なお、本実施形態において、ソースコイルの移動速度は、例えば、該ソースコイルの1フレーム毎の移動量から算出されるものであるとする。また、本実施形態において、ソースコイルの移動速度は、挿入部11の挿入方向において正の値をとり、挿入部11の抜去方向において負の値をとるものとする。
Rc=k×Rb+(1−k)×Rp ・・・(1)
さらに、解析結果表示制御ブロック43は、図5のステップS3において算出した、表示期間制御値Rcと、表示期間制御値Rcに関する閾値Rcthとの比較を行う。そして、解析結果表示制御ブロック43は、表示期間制御値Rcが閾値Rcthよりも大きいことを検出すると(図5のステップS4)、挿入部11がループ形状等を形成することなく挿入または抜去がなされていると判定し、ディスプレイ28に表示されている挿入補助情報を消去するための処理を行う(図5のステップS5)。また、解析結果表示制御ブロック43は、表示期間制御値Rcが閾値Rcth以下であることを検出すると(図5のステップS4)、挿入部11がループ形状等を形成することにより、挿入部11の挿入が適切になされていないと判定し、ディスプレイ28に挿入補助情報を表示するための処理を行う(図5のステップS6)。
図6は、本発明の第2の実施形態に係るものである。図6は、第2の実施形態において、解析結果表示制御ブロックにより行われる処理の流れを示す説明図である。
Claims (6)
- 被検体内に挿入された内視鏡の挿入部における所定の複数の箇所の座標値を含む情報である、挿入状態情報を取得する挿入状態取得部と、
前記挿入状態情報に基づき、前記所定の複数の箇所の座標値各々に応じた解析データを生成する解析処理部と、
前記解析データを記憶する記憶部と、
前記記憶部に記憶された解析データのうち、最新の解析データと1または複数の過去の解析データとに基づいて表示期間制御値を算出するとともに、該表示期間制御値に基づき、前記挿入部の挿入操作を支援可能な情報である、挿入補助情報を表示部に表示させるか否かを判定する表示制御部と、
を有することを特徴とする生体観測システム。 - 前記1または複数の過去の解析データは、前記最新の解析データに対して時間的に各々連続したものであることを特徴とする請求項1の生体観測システム。
- 前記解析データは、前記挿入部の先端側の所定の第1の位置と、前記挿入部の基端側の所定の第2の位置との移動速度比であることを特徴とする請求項1または請求項2に記載の生体観測システム。
- 前記解析データは、前記挿入部の湾曲角度であることを特徴とする請求項1または請求項2に記載の生体観測システム。
- 前記解析データは、前記挿入部の挿入形状の形状パターンであることを特徴とする請求項1または請求項2に記載の生体観測システム。
- 前記解析データは、前記挿入部が前記被検体内に挿入された挿入量であることを特徴とする請求項1または請求項2に記載の生体観測システム。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006306975A JP4855902B2 (ja) | 2006-11-13 | 2006-11-13 | 生体観測システム |
| CN2007800415775A CN101534699B (zh) | 2006-11-13 | 2007-07-12 | 内窥镜插入形状分析系统 |
| PCT/JP2007/063882 WO2008059636A1 (fr) | 2006-11-13 | 2007-07-12 | Système d'analyse de forme lors de l'insertion d'un endoscope et système d'observation d'un corps vivant |
| EP07790676.6A EP2082678B1 (en) | 2006-11-13 | 2007-07-12 | Endoscope insertion shape analysis system |
| CN201010605413.4A CN102078194B (zh) | 2006-11-13 | 2007-07-12 | 内窥镜插入形状分析系统 |
| US12/464,404 US8251890B2 (en) | 2006-11-13 | 2009-05-12 | Endoscope insertion shape analysis system and biological observation system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006306975A JP4855902B2 (ja) | 2006-11-13 | 2006-11-13 | 生体観測システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008119260A JP2008119260A (ja) | 2008-05-29 |
| JP4855902B2 true JP4855902B2 (ja) | 2012-01-18 |
Family
ID=39504661
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006306975A Expired - Fee Related JP4855902B2 (ja) | 2006-11-13 | 2006-11-13 | 生体観測システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4855902B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5319309B2 (ja) * | 2009-01-15 | 2013-10-16 | 株式会社東芝 | 経食道超音波プローブおよび経食道超音波プローブを備えた超音波診断装置 |
| JP5198686B2 (ja) | 2010-07-01 | 2013-05-15 | オリンパスメディカルシステムズ株式会社 | プローブ形状検出装置及びプローブ形状検出装置の作動方法 |
| EP3473158B1 (en) | 2016-06-16 | 2020-08-12 | FUJIFILM Corporation | Navigation device, navigation method, and endoscope system |
| JP7078494B2 (ja) * | 2018-08-24 | 2022-05-31 | 富士フイルム株式会社 | 表示制御装置、内視鏡システム、表示制御方法、及び表示制御プログラム |
| CN115916023A (zh) * | 2020-04-09 | 2023-04-04 | 日本电气株式会社 | 内窥镜插入辅助装置、方法及存储有程序的非暂态计算机可读介质 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4274854B2 (ja) * | 2003-06-06 | 2009-06-10 | オリンパス株式会社 | 内視鏡挿入形状解析装置 |
| JP4656988B2 (ja) * | 2005-04-11 | 2011-03-23 | オリンパスメディカルシステムズ株式会社 | 内視鏡挿入形状解析装置および、内視鏡挿入形状解析方法 |
-
2006
- 2006-11-13 JP JP2006306975A patent/JP4855902B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008119260A (ja) | 2008-05-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4153963B2 (ja) | 内視鏡挿入形状検出装置 | |
| JP2008301968A (ja) | 内視鏡画像処理装置 | |
| WO2008059636A1 (fr) | Système d'analyse de forme lors de l'insertion d'un endoscope et système d'observation d'un corps vivant | |
| JP4274854B2 (ja) | 内視鏡挿入形状解析装置 | |
| JP4855901B2 (ja) | 内視鏡挿入形状解析システム | |
| JP4789545B2 (ja) | 内視鏡挿入形状解析装置 | |
| JP2010035637A (ja) | 画像表示装置およびこれを用いた内視鏡システム | |
| JP4855902B2 (ja) | 生体観測システム | |
| JP2009039449A (ja) | 画像処理装置 | |
| WO2020165978A1 (ja) | 画像記録装置、画像記録方法および画像記録プログラム | |
| JP2023014288A (ja) | 医用画像処理装置、プロセッサ装置、内視鏡システム、医用画像処理装置の作動方法及びプログラム | |
| JP4855912B2 (ja) | 内視鏡挿入形状解析システム | |
| JP7562193B2 (ja) | 情報処理装置、情報処理方法、及びコンピュータプログラム | |
| WO2022158451A1 (ja) | コンピュータプログラム、学習モデルの生成方法、及び支援装置 | |
| JP4794992B2 (ja) | 挿入モニタリング装置 | |
| JP7189969B2 (ja) | 画像処理装置、画像処理装置の作動方法及び画像処理プログラム | |
| JP4615842B2 (ja) | 内視鏡システムおよび内視鏡画像処理装置 | |
| JP2000079087A (ja) | 内視鏡形状検出装置 | |
| JP7256275B2 (ja) | 医療画像処理装置、内視鏡システム、医療画像処理装置の作動方法及びプログラム | |
| JP2009112507A (ja) | 情報制御方法及び装置、並びに内視鏡システム | |
| JP2008093213A (ja) | 医療用画像処理装置及び医療用画像処理方法 | |
| JP2002369790A (ja) | 内視鏡形状検出システム | |
| JP4827414B2 (ja) | 電子内視鏡システムとファイリングシステム | |
| WO2019027031A1 (ja) | 内視鏡形状表示装置、及び内視鏡システム | |
| WO2023195103A1 (ja) | 検査支援システムおよび検査支援方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090924 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111025 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111027 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141104 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4855902 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141104 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |