JP4810088B2 - 画像処理装置、画像処理方法及びそのプログラム - Google Patents
画像処理装置、画像処理方法及びそのプログラム Download PDFInfo
- Publication number
- JP4810088B2 JP4810088B2 JP2004366467A JP2004366467A JP4810088B2 JP 4810088 B2 JP4810088 B2 JP 4810088B2 JP 2004366467 A JP2004366467 A JP 2004366467A JP 2004366467 A JP2004366467 A JP 2004366467A JP 4810088 B2 JP4810088 B2 JP 4810088B2
- Authority
- JP
- Japan
- Prior art keywords
- interpolation
- defect
- defective portion
- processing
- processing apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/70—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals characterised by syntax aspects related to video coding, e.g. related to compression standards
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/85—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using pre-processing or post-processing specially adapted for video compression
- H04N19/89—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using pre-processing or post-processing specially adapted for video compression involving methods or arrangements for detection of transmission errors at the decoder
- H04N19/895—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using pre-processing or post-processing specially adapted for video compression involving methods or arrangements for detection of transmission errors at the decoder in combination with error concealment
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Television Systems (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
- Compression, Expansion, Code Conversion, And Decoders (AREA)
- Two-Way Televisions, Distribution Of Moving Picture Or The Like (AREA)
Description
(第1の実施形態)
まず、本発明の第1の実施形態における情報処理装置(画像処理装置)として、ネットワークを介して配信される動画像ストリームを受信し再生する機能を有する画像処理装置を一例として説明する。
まず、ステップs205において、画像欠陥検出部15は、フレームデータ格納部12から読み出した画像データにおける欠陥と位置を検出する。本実施形態においては、画像データの欠陥の原因として例えば以下の2点を考慮する。
(1)通信エラー(通信パケットが到着しない場合も含む)
(2)デコードエラー(画像伸張処理部14での処理エラー)
特に(1)の通信エラーにおいて、通信パケット到着時にそのパケットが画像のどの位置のデータを含むか明確であれば、画像欠陥の位置の検出が容易となる。
修復難易度=(n−1)×m

以下、図3−1、図3−2、及び図8に基づき、本発明の第2の実施形態における画像処理装置について説明する。
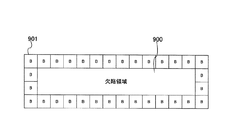
以下、図9、10に基づき、本発明の第3の実施形態における情報処理装置(画像処理装置)について説明する。
図9は、第3の実施形態における画像中の欠陥領域(欠陥部分)例を示す図である。図10は、第3の実施形態で用いるDCT(離散コサイン変換)係数に対する重み付け係数例を示す図である。
以下、図11、12に基づき、本発明の第4の実施形態における画像処理装置について説明する。
以下、図13に基づき、本発明の第5の実施形態における情報処理装置について説明する。尚、第5の実施形態における情報処理装置は、図1及び図2に示した情報処理装置10と同様の構成であるので、第5の実施形態における情報処理装置10として説明する。第5の実施形態における情報処理装置10が、第1の実施形態における情報処理装置10と異なる点は、補間方法決定部16において、全欠陥に対する処理時間の合計を見積もり、その見積もりに応じて補間方法を変更する機能を有する点である。
また、上記プログラムは、前述した機能の一部を実現する為のものであっても良い。さらに、前述した機能をコンピュータシステムに既に記録されているプログラムとの組合せで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
以上、この発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
11 制御部
12 フレームデータ格納部
13 通信処理部
14 画像伸張処理部
15 画図欠陥検出部
16 補間方法決定部
17 重要度算出部
18 補間順位決定部
19 タイマ処理部
1A 補間処理部
1B 中断処理部
1C 表示処理部
20 ネットワーク
30 動画像ストリーム配信サーバ
101 CPU
102 RAM
103 ROM
104 通信部
105 デコーダ
106 アクセラレータ
107 バス
501〜505 欠陥領域(欠陥部分)
800 画像処理装置
801 通信インタフェース
802 通信処理部
803 通信欠陥検出処理部
804 デコード処理部
805 画像欠陥検出処理部
806 補間方法決定処理部
807 画像欠陥優先度付加処理部
808 スケジュール処理部
809 補間処理部
810 出力処理部
811 出力装置
Claims (11)
- 動画像データを処理する画像処理装置であって、
動画像データから欠陥部分を検出する欠陥検出手段と、
前記動画像データの1つのフレーム内の欠陥部分に対して優先順位を決定する決定手段と、
前記1つのフレーム内の第1の欠陥部分と第2の欠陥部分とのうち、前記決定手段がより高い優先順位に決定した前記第1の欠陥部分の補間処理を行い、当該第1の欠陥部分の補間処理中に、前記動画像データのフレームレートに基づく時間に応じたタイムアウト時間に達した場合、前記第2の欠陥部分の補間処理を行わない補間処理手段と
を具備することを特徴とする画像処理装置。 - 前記決定手段は、前記欠陥部分の位置情報に応じて前記優先順位を決定することを特徴とする請求項1に記載の画像処理装置。
- 前記欠陥部分の位置情報は、前記欠陥部分が含まれる画像の中心からの距離を示す情報であることを特徴とする請求項2に記載の画像処理装置。
- 前記欠陥部分が、前のフレームで検出され、かつ補間処理の対象となった欠陥部分と同じ位置であるか否かを判定する判定手段を更に具備し、
前記決定手段は、前記判定手段の判定を用いて優先順位を決定することを特徴とする請求項1に記載の画像処理装置。 - 前記決定手段は、前記欠陥部分が人物の顔の領域を含むか否かに応じて優先順位を決定することを特徴とする請求項1に記載の画像処理装置。
- 前記決定手段は、前記欠陥部分が焦点の合致している領域を含むか否かに応じて優先順位を決定することを特徴とする請求項1に記載の画像処理装置。
- 前記決定手段は、前記欠陥部分の広さに応じて前記優先順位を決定することを特徴とする請求項1に記載の画像処理装置。
- 前記決定手段は、フレーム間の前記欠陥部分を含む領域の動きの大きさに基づいて優先順位を決定することを特徴とする請求項7に記載の画像処理装置。
- 前記補間処理手段は、前記決定手段で前記第1及び第2の欠陥部分を含む複数の欠陥部分に対して優先順位が決定された場合、前記優先順位をもとに一番高い順位の欠陥部分から順に補間処理を行うことを特徴とする請求項1に記載の画像処理装置。
- 動画像データを処理する画像処理装置を用いた画像処理方法であって、
動画像データから欠陥部分を検出する欠陥検出ステップと、
前記動画像データの1つのフレーム内の欠陥部分に対して優先順位を決定する決定ステップと、
前記1つのフレーム内の第1の欠陥部分と第2の欠陥部分とのうち、前記決定ステップがより高い優先順位に決定した前記第1の欠陥部分の補間処理を行い、当該第1の欠陥部分の補間処理中に、前記動画像データのフレームレートに基づく時間に応じたタイムアウト時間に達した場合、前記第2の欠陥部分の補間処理を行わない補間処理ステップと
を有することを特徴とする画像処理方法。 - 動画像データを処理する画像処理方法をコンピュータに実行させるプログラムであって、
動画像データから欠陥部分を検出する欠陥検出ステップと、
前記動画像データの1つのフレーム内の欠陥部分に対して優先順位を決定する決定ステップと、
前記1つのフレーム内の第1の欠陥部分と第2の欠陥部分とのうち、前記決定ステップがより高い優先順位に決定した前記第1の欠陥部分の補間処理を行い、当該第1の欠陥部分の補間処理中に、前記動画像データのフレームレートに基づく時間に応じたタイムアウト時間に達した場合、前記第2の欠陥部分の補間処理を行わない補間処理ステップと
をコンピュータに実行させるためのプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004366467A JP4810088B2 (ja) | 2004-12-17 | 2004-12-17 | 画像処理装置、画像処理方法及びそのプログラム |
| US11/300,084 US7920726B2 (en) | 2004-12-17 | 2005-12-14 | Image processing apparatus, image processing method, and program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004366467A JP4810088B2 (ja) | 2004-12-17 | 2004-12-17 | 画像処理装置、画像処理方法及びそのプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006174280A JP2006174280A (ja) | 2006-06-29 |
| JP2006174280A5 JP2006174280A5 (ja) | 2008-01-31 |
| JP4810088B2 true JP4810088B2 (ja) | 2011-11-09 |
Family
ID=36652840
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004366467A Expired - Fee Related JP4810088B2 (ja) | 2004-12-17 | 2004-12-17 | 画像処理装置、画像処理方法及びそのプログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7920726B2 (ja) |
| JP (1) | JP4810088B2 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4921928B2 (ja) * | 2006-11-08 | 2012-04-25 | 株式会社日立国際電気 | 映像受信装置および映像受信方法 |
| JP2009130719A (ja) * | 2007-11-26 | 2009-06-11 | Sanyo Electric Co Ltd | 送信方法および受信方法ならびにそれらを利用したデータ処理装置 |
| JP4561837B2 (ja) | 2008-01-07 | 2010-10-13 | 日本電気株式会社 | 再生装置、システム、方法、プログラム及びコンピュータ読取可能な記録媒体 |
| DE102008024255A1 (de) | 2008-05-20 | 2009-12-10 | Siemens Enterprise Communications Gmbh & Co. Kg | Vorrichtungen und Verfahren zum Verarbeiten von Datenpaketen eines Datenstroms, sowie eine Verwendung der Vorrichtungen |
| US20100014584A1 (en) * | 2008-07-17 | 2010-01-21 | Meir Feder | Methods circuits and systems for transmission and reconstruction of a video block |
| JP2010258624A (ja) | 2009-04-22 | 2010-11-11 | Panasonic Corp | 画像再生装置及び画像再生方法 |
| JP4911234B2 (ja) * | 2010-03-23 | 2012-04-04 | コニカミノルタビジネステクノロジーズ株式会社 | 表示画面制御装置、表示画面制御方法およびプログラム |
| JP6484403B2 (ja) * | 2014-03-28 | 2019-03-13 | 株式会社日立情報通信エンジニアリング | 通信装置、通信プログラム、通信方法 |
| JP2016076761A (ja) * | 2014-10-03 | 2016-05-12 | 株式会社ニコン | 画像処理装置および画像処理プログラム |
| CN104796726B (zh) * | 2015-04-10 | 2018-02-02 | 北京邮电大学 | 一种检测图像压缩痕迹的方法 |
| GB201519801D0 (en) * | 2015-11-10 | 2015-12-23 | Rolls Royce Plc | Pass fail sentencing of hollow components |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6261485A (ja) | 1985-09-12 | 1987-03-18 | Fujitsu Ltd | フレ−ム間予測復号化装置 |
| FR2645383B1 (fr) * | 1989-03-31 | 1997-06-27 | Thomson Consumer Electronics | Procede et dispositif d'interpolation temporelle d'images, a compensation de mouvement corrigee |
| JPH0322735A (ja) | 1989-06-20 | 1991-01-31 | Matsushita Electric Ind Co Ltd | 映像信号のパケット伝送装置 |
| US5140417A (en) * | 1989-06-20 | 1992-08-18 | Matsushita Electric Co., Ltd. | Fast packet transmission system of video data |
| US5125043A (en) * | 1989-06-23 | 1992-06-23 | Microterm, Inc. | Image processing with real time zoom logic |
| US5164992A (en) * | 1990-11-01 | 1992-11-17 | Massachusetts Institute Of Technology | Face recognition system |
| JPH0750752A (ja) * | 1993-08-06 | 1995-02-21 | Fuji Xerox Co Ltd | 画像密度変換方法及び装置 |
| US5544256A (en) * | 1993-10-22 | 1996-08-06 | International Business Machines Corporation | Automated defect classification system |
| JP2981642B2 (ja) * | 1994-01-07 | 1999-11-22 | 富士通株式会社 | 映像生成装置 |
| JP3360922B2 (ja) * | 1994-04-11 | 2003-01-07 | 株式会社日立製作所 | 動画像通信システム及びその画像復元装置並びにその画像復元方法 |
| US5917934A (en) * | 1996-03-15 | 1999-06-29 | Sony Corporation | Automated visual inspection apparatus for detecting defects and for measuring defect size |
| US5982946A (en) * | 1996-09-20 | 1999-11-09 | Dainippon Screen Mfg. Co., Ltd. | Method of identifying defective pixels in digital images, and method of correcting the defective pixels, and apparatus and recording media therefor |
| JP3114668B2 (ja) * | 1997-10-03 | 2000-12-04 | 日本電気株式会社 | 物体検出・背景除去方法、装置およびプログラムを記録した記録媒体 |
| JPH11331839A (ja) * | 1998-05-13 | 1999-11-30 | Matsushita Electric Ind Co Ltd | 映像伝送再送の装置及び方法 |
| US6289113B1 (en) * | 1998-11-25 | 2001-09-11 | Iridian Technologies, Inc. | Handheld iris imaging apparatus and method |
-
2004
- 2004-12-17 JP JP2004366467A patent/JP4810088B2/ja not_active Expired - Fee Related
-
2005
- 2005-12-14 US US11/300,084 patent/US7920726B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US7920726B2 (en) | 2011-04-05 |
| US20060152605A1 (en) | 2006-07-13 |
| JP2006174280A (ja) | 2006-06-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2015101126A1 (zh) | 一种在视频通话中适应屏幕方向切换的方法和装置 | |
| US9172907B2 (en) | Method and apparatus for dynamically adjusting aspect ratio of images during a video call | |
| CN105827633B (zh) | 一种视频传输方法及装置 | |
| US10582211B2 (en) | Neural network to optimize video stabilization parameters | |
| JP4810088B2 (ja) | 画像処理装置、画像処理方法及びそのプログラム | |
| JP5766877B2 (ja) | 類似度、視覚的品質、および関心に基づくフレーム符号化選択 | |
| JP2007522772A (ja) | 適応的画像安定 | |
| JP2009533924A (ja) | フレーム選択を用いるパノラマ画像の構成 | |
| JP2015536594A (ja) | 積極的なビデオフレームドロップ | |
| US6961082B2 (en) | Image display control system reducing image transmission delay | |
| JP2022002376A (ja) | 画像処理装置、画像処理方法およびプログラム | |
| JP2009273048A (ja) | 画像処理装置 | |
| JP2004015501A (ja) | 動画像符号化装置および動画像符号化方法 | |
| US6157675A (en) | Image transmission device and image transmission method | |
| JP2005012619A (ja) | パノラマ画像生成装置 | |
| JP6660869B2 (ja) | 遠隔作業支援システムおよびその作業者端末 | |
| CN110913118B (zh) | 视频处理方法、装置及存储介质 | |
| US20110317921A1 (en) | Information processing equipment and method, and information processing system | |
| JP2006517363A (ja) | モーションベクトルの予測方法及びシステム | |
| EP3468188A1 (en) | Method and system for encoding video streams | |
| JP2005341093A (ja) | コンテンツ適応化装置、コンテンツ適応化システム、コンテンツ適応化方法 | |
| US8107525B1 (en) | Variable bit rate video CODEC using adaptive tracking for video conferencing | |
| JP2004208146A (ja) | 動画像符号化装置および動画像符号化方法 | |
| CN114125275B (zh) | 拍摄装置的带宽调整方法、装置、计算机设备和存储介质 | |
| CN113160342B (zh) | 基于反馈的编码方法及装置、存储介质、电子设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071212 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071212 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101013 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101019 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110426 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110615 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110816 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110822 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140826 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |