JP4791319B2 - インバータ装置、圧縮機駆動装置および冷凍・空調装置 - Google Patents
インバータ装置、圧縮機駆動装置および冷凍・空調装置 Download PDFInfo
- Publication number
- JP4791319B2 JP4791319B2 JP2006279575A JP2006279575A JP4791319B2 JP 4791319 B2 JP4791319 B2 JP 4791319B2 JP 2006279575 A JP2006279575 A JP 2006279575A JP 2006279575 A JP2006279575 A JP 2006279575A JP 4791319 B2 JP4791319 B2 JP 4791319B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- phase difference
- acceleration
- current
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Control Of Motors That Do Not Use Commutators (AREA)
Description
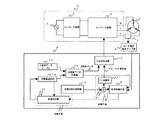
以下、本発明の第1実施形態を図1に基づいて説明する。本発明のモータ駆動用のインバータ装置は、図1に示すように、3相の同期モータであるモータ1がインバータ回路2の出力側に接続されており、インバータ制御によって駆動される。インバータ回路2には、コンバータ回路3によってAC電源4からの交流電圧が直流電圧に変換されて供給される。
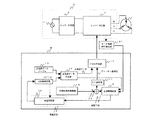
第2実施形態と第1実施形態とは、図3に示すように、モータ電流推定に関する手段が異なる。すなわち、第1実施形態では、モータ1の特定相に流れるモータ電流を電流センサ5によって検出しているが、第2実施形態は、コンバータ回路3とインバータ回路2とを流れる電流を検出する。
第3実施形態と第1実施形態とは、図4に示すように、モータ電流推定に関する手段が異なる。すなわち、第1実施形態では、モータ1の特定相に流れるモータ電流を電流センサ5によって検出しているが、第3実施形態は、インバータ部Aを流れるモータ電流の極性を検出する。
2 インバータ回路
3 コンバータ回路
4 AC電源
5 電流センサ
6 モータ電流検出アンプ部
8 位相差検出部
9 目標位相差情報格納部
10 加算器
11 PI演算部
12 回転数設定部
13 正弦波データテーブル
14 正弦波データ作成部
15 PWM作成部
16 加速判定部
21 電流検出抵抗
22 直流電流検出アンプ部
23 モータ電流推定部
31 モータ電流極性検出部
A インバータ部
B マイクロコンピュータ
Claims (5)
- 可変電圧、可変周波数を出力し、同期モータを可変速制御するインバータ装置であって、同期モータに電力を供給するインバータ部と、PWM制御方式によって前記インバータ部を他制運転制御する制御装置とを備え、
前記制御装置は、前記インバータ部を流れる電流を検出する電流検出手段と、検出された前記電流からモータ電流とモータ電圧との位相差を検出する位相差検出手段と、前記位相差と目標とする目標位相差との差に応じてデューティ基準値を調整する調整手段と、前記位相差の変化から前記同期モータの加速を制御する加速手段と、前記同期モータの回転数指令値を設定する回転数設定手段と、前記回転数指令値に対応する出力波形データと調整された前記デューティ基準値とに基づいてPWM信号を算出するPWM信号作成手段とを有し、
前記回転数設定手段は、前記加速手段の指令に応じて前記回転数指令値を変更することを特徴とするインバータ装置。 - 加速手段は、位相差が減少している場合は同期モータの加速を許可し、位相差が増加している場合は前記同期モータの加速を禁止することを特徴とする請求項1に記載のインバータ装置。
- 請求項1または2に記載のインバータ装置を備えたことを特徴とする圧縮機駆動装置。
- 請求項3に記載の圧縮機駆動装置を備えたことを特徴とする冷凍装置。
- 請求項3に記載の圧縮機駆動装置を備えたことを特徴とする空調装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006279575A JP4791319B2 (ja) | 2006-10-13 | 2006-10-13 | インバータ装置、圧縮機駆動装置および冷凍・空調装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006279575A JP4791319B2 (ja) | 2006-10-13 | 2006-10-13 | インバータ装置、圧縮機駆動装置および冷凍・空調装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008099467A JP2008099467A (ja) | 2008-04-24 |
| JP2008099467A5 JP2008099467A5 (ja) | 2009-05-14 |
| JP4791319B2 true JP4791319B2 (ja) | 2011-10-12 |
Family
ID=39381714
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006279575A Expired - Fee Related JP4791319B2 (ja) | 2006-10-13 | 2006-10-13 | インバータ装置、圧縮機駆動装置および冷凍・空調装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4791319B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5195444B2 (ja) * | 2009-01-14 | 2013-05-08 | パナソニック株式会社 | ブラシレスdcモータの駆動装置並びにこれを用いた冷蔵庫及び空気調和機 |
| JP5556992B2 (ja) * | 2009-08-21 | 2014-07-23 | アイシン精機株式会社 | モータ制御装置及び車両用シート制御装置 |
| EP2825403B1 (en) | 2012-03-15 | 2018-06-13 | BorgWarner Sweden AB | An electric drive axle arrangement for a road vehicle |
| KR101367678B1 (ko) | 2012-07-31 | 2014-02-26 | 삼성전기주식회사 | 모터 구동 장치 |
| KR102459423B1 (ko) * | 2020-09-10 | 2022-10-27 | 에스트라오토모티브시스템 주식회사 | Emi 저감을 위한 차량용 전동압축기의 모터 제어 방법 및 시스템 |
-
2006
- 2006-10-13 JP JP2006279575A patent/JP4791319B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008099467A (ja) | 2008-04-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Kim et al. | Commutation torque ripple reduction in a position sensorless brushless DC motor drive | |
| US9444377B2 (en) | Motor drive control device | |
| JP3888082B2 (ja) | モータ装置およびその制御方法 | |
| JP3684203B2 (ja) | モータ制御装置 | |
| JP5222640B2 (ja) | 冷凍装置 | |
| WO2012144276A1 (ja) | モータ制御装置 | |
| US7375482B2 (en) | Driving device of motor | |
| JP6463966B2 (ja) | モータ駆動装置およびモータ駆動用モジュール並びに冷凍機器 | |
| JP4791319B2 (ja) | インバータ装置、圧縮機駆動装置および冷凍・空調装置 | |
| US11088646B2 (en) | Motor driving control device and motor driving control method | |
| JP3753074B2 (ja) | Dcブラシレスモーター装置 | |
| JP4050489B2 (ja) | モータの制御方法 | |
| JP2008172948A (ja) | ブラシレスモータの制御装置 | |
| JP2003199388A (ja) | モータ駆動装置 | |
| JP2006149097A (ja) | モータ制御装置 | |
| JP2004147430A (ja) | 電動機のセンサレス駆動制御方法及び駆動制御システム | |
| JP5422435B2 (ja) | ブラシレスモータの駆動装置および駆動方法 | |
| JP4197974B2 (ja) | モータ制御装置及びモータの制御方法 | |
| JP2008148437A (ja) | 永久磁石型同期モータの制御装置 | |
| JP2014007916A (ja) | モータ制御装置 | |
| JP2007151215A (ja) | インバータ装置、圧縮機駆動装置および冷凍・空調装置 | |
| JP2011050170A (ja) | インバータ装置 | |
| JP2000333465A (ja) | インバータ装置、電動機駆動装置、および電動機駆動システム装置 | |
| US20230142956A1 (en) | Motor controller, motor system and method for controlling motor | |
| JP2009011014A (ja) | インバータ制御装置と電動圧縮機および家庭用電気機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090327 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090327 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110531 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110628 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110721 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140729 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |