JP4689571B2 - 軽量接合ヘッド組立体 - Google Patents
軽量接合ヘッド組立体 Download PDFInfo
- Publication number
- JP4689571B2 JP4689571B2 JP2006280417A JP2006280417A JP4689571B2 JP 4689571 B2 JP4689571 B2 JP 4689571B2 JP 2006280417 A JP2006280417 A JP 2006280417A JP 2006280417 A JP2006280417 A JP 2006280417A JP 4689571 B2 JP4689571 B2 JP 4689571B2
- Authority
- JP
- Japan
- Prior art keywords
- head assembly
- joining
- joining head
- motor
- support structure
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000758 substrate Substances 0.000 claims description 9
- 238000005452 bending Methods 0.000 claims description 8
- 230000003993 interaction Effects 0.000 claims description 3
- 238000003466 welding Methods 0.000 claims description 3
- DMFGNRRURHSENX-UHFFFAOYSA-N beryllium copper Chemical compound [Be].[Cu] DMFGNRRURHSENX-UHFFFAOYSA-N 0.000 claims description 2
- 229910001220 stainless steel Inorganic materials 0.000 claims description 2
- 239000010935 stainless steel Substances 0.000 claims description 2
- 239000007787 solid Substances 0.000 claims 1
- 239000004065 semiconductor Substances 0.000 description 7
- 238000010348 incorporation Methods 0.000 description 4
- 238000013461 design Methods 0.000 description 3
- 230000036316 preload Effects 0.000 description 3
- 238000000034 method Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000005336 cracking Methods 0.000 description 1
- 238000011143 downstream manufacturing Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000004806 packaging method and process Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
Images






Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67144—Apparatus for mounting on conductive members, e.g. leadframes or conductors on insulating substrates
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/6838—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping with gripping and holding devices using a vacuum; Bernoulli devices
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Die Bonding (AREA)
- Adhesives Or Adhesive Processes (AREA)
- Wire Bonding (AREA)
Description
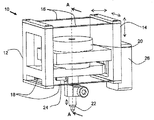
12 接合本体
14 支持構造体
16、18 屈曲要素
16a、18a 屈曲要素
16b、18b 屈曲要素
20 ボイスコイルモータ
22 コレット
24 真空出口
26 エンコーダ、磁石
28 ボイスコイル
30 ダイ
32 表面
36 屈曲アーム
38 装着穴
40 翼付フランジ
42 横方向移動
44 回転移動
Claims (14)
- 接合ヘッド組立体であって、
ダイを基板に接合するための接合ツールと、
該接合ツールを装着している接合本体と、
前記接合ヘッド組立体を異なる位置に移動するよう駆動されるように形状構成された支持構造体と、
少なくとも1つの平面に実質的に沿って配置されているとともに、前記接合本体と前記支持構造体とに取り付けられた撓み部材であって、前記支持構造体に対する前記接合本体の移動の間、前記接合本体を撓み可能に支持するように作動可能である撓み部材と、
前記支持構造体に連結されたモータであって、前記少なくとも1つの平面に実質的に垂直に延在する軸線に沿って前記接合本体を前記支持構造体に対して移動させるよう駆動するように作動可能であるとともに、前記接合ツールと同軸に配置されて前記モータからの実効力を前記接合ツールへ直接伝えるモータと、
を備える接合ヘッド組立体。 - 前記モータは、
ボイスコイル構成要素と、
電磁相互作用を行うように形状構成された磁気回路構成要素と、
を有するボイスコイルモータを備え、
前記ボイスコイル構成要素と前記磁気回路構成要素とのうちの一方の構成要素は前記接合本体に装着され、他方の構成要素は前記支持構造体に装着される、請求項1に記載の接合ヘッド組立体。 - 前記ボイスコイルモータは、前記接合ツールのダイとの接触が、前記ボイスコイル構成要素によって伝達される所定のレベルより高い電流のサージによって検出可能であるように構成される、請求項2に記載の接合ヘッド組立体。
- 前記モータは、正方形状又は長方形状に配置された同一平面状の4つの可撓性アームを備える前記撓み部材に対して中央に装着されて、前記モータが前記撓み部材の少なくとも前記1つの平面に垂直な平面内に存在する力を与えるように形状構成されている請求項1に記載の接合ヘッド組立体。
- 前記モータは、さらに前記与えられた力が前記撓み部材の前記少なくとも1つの平面の中央部を通過するように装着されている、請求項4に記載の接合ヘッド組立体。
- 前記撓み部材は、第1平面に沿って配置された第1組の撓み部材と、前記第1平面に平行な第2平面に沿って配置された第2組の撓み部材と、を備える、請求項1に記載の接合ヘッド組立体。
- 前記第1及び第2平面は前記モータの対向する両側に位置する、請求項6に記載の接合ヘッド組立体。
- 前記撓み部材は、少なくとも2つの可撓性アームを備え、これら可撓性アームは互いから離間している、請求項1に記載の接合ヘッド組立体。
- 前記撓み部材は、正方形状又は長方形状に配置された、同一平面上の4つの可撓性アームを備える、請求項8に記載の接合ヘッド組立体。
- 前記撓み部材は、該撓み部材が配置される前記少なくとも1つの平面に垂直に延在するフランジを更に備える、請求項1に記載の接合ヘッド組立体。
- 前記撓み部材はステンレス鋼又はベリリウム銅製である、請求項1に記載の接合ヘッド組立体。
- 前記支持構造体に対する前記接合本体の移動を監視するように構成されたエンコーダを更に備える、請求項1に記載の接合ヘッド組立体。
- 前記接合本体によって移動した距離を測定するために、前記エンコーダが参照するために前記接合本体に結合された、マーキングを具備するスケールを含む、請求項12に記載の接合ヘッド組立体。
- 前記接合ツールはダイ・ボンディング装置又はダイ・ピックアンドプレイス装置である、請求項1に記載の接合ヘッド組立体。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/250,270 US7303111B2 (en) | 2005-10-14 | 2005-10-14 | Lightweight bondhead assembly |
| US11/250,270 | 2005-10-14 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007110136A JP2007110136A (ja) | 2007-04-26 |
| JP2007110136A5 JP2007110136A5 (ja) | 2010-03-11 |
| JP4689571B2 true JP4689571B2 (ja) | 2011-05-25 |
Family
ID=37433618
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006280417A Active JP4689571B2 (ja) | 2005-10-14 | 2006-10-13 | 軽量接合ヘッド組立体 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US7303111B2 (ja) |
| EP (1) | EP1775753A3 (ja) |
| JP (1) | JP4689571B2 (ja) |
| CN (1) | CN100440426C (ja) |
| MY (1) | MY138793A (ja) |
| SG (1) | SG131882A1 (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1424884A1 (de) * | 2002-11-29 | 2004-06-02 | Leica Geosystems AG | Verfahren zur Montage miniaturisierter Bauteile auf einer Trägerplatte |
| US8293043B2 (en) * | 2006-07-24 | 2012-10-23 | Asm Assembly Automation Ltd | Automatic level adjustment for die bonder |
| US8215648B2 (en) * | 2008-04-21 | 2012-07-10 | Asm Assembly Automation Ltd | Collet mounting assembly for a die bonder |
| CN101635267B (zh) * | 2008-07-21 | 2015-03-25 | 旺矽科技股份有限公司 | 取放晶粒的装置及方法 |
| US8651159B2 (en) * | 2009-06-12 | 2014-02-18 | Asm Assembly Automation Ltd | Die bonder providing a large bonding force |
| KR200460026Y1 (ko) | 2010-02-03 | 2012-04-27 | 리드텍(주) | 비접촉 구동 모터를 이용한 다이본딩 장치 |
| CN102343476B (zh) * | 2010-08-02 | 2015-06-03 | 北京中电科电子装备有限公司 | 键合头装置 |
| CN102343477B (zh) * | 2010-08-02 | 2014-02-19 | 北京中电科电子装备有限公司 | 一种键合头装置 |
| CN102157409A (zh) * | 2011-03-17 | 2011-08-17 | 南通富士通微电子股份有限公司 | 键合机 |
| JP5813432B2 (ja) * | 2011-09-19 | 2015-11-17 | ファスフォードテクノロジ株式会社 | ダイボンダ及びボンディング方法 |
| US9010827B2 (en) | 2011-11-18 | 2015-04-21 | Nike, Inc. | Switchable plate manufacturing vacuum tool |
| US20130127193A1 (en) * | 2011-11-18 | 2013-05-23 | Nike, Inc. | Manufacturing Vacuum Tool |
| US8858744B2 (en) | 2011-11-18 | 2014-10-14 | Nike, Inc. | Multi-functional manufacturing tool |
| US9136243B2 (en) | 2013-12-03 | 2015-09-15 | Kulicke And Soffa Industries, Inc. | Systems and methods for determining and adjusting a level of parallelism related to bonding of semiconductor elements |
| CN105762099B (zh) * | 2014-12-17 | 2019-07-09 | 北京中电科电子装备有限公司 | 一种芯片供送机构及粘片机 |
| CN105789101B (zh) * | 2014-12-25 | 2020-05-05 | 北京中电科电子装备有限公司 | 一种芯片供送机构及粘片机 |
| CN106964889A (zh) * | 2017-04-28 | 2017-07-21 | 菲斯达排放控制装置(苏州)有限公司 | 便于深腔结构焊接的点焊装置 |
| CN111573266B (zh) * | 2019-02-18 | 2022-01-11 | 宁波舜宇光电信息有限公司 | 载具拼板上下料设备及自动扣料机 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10242175A (ja) * | 1997-02-28 | 1998-09-11 | Toshiba Mechatronics Kk | ペレットボンディング装置 |
| WO2004064124A1 (en) * | 2003-01-16 | 2004-07-29 | Koninklijke Philips Electronics N.V. | Chip transfer method and apparatus |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3209447A (en) * | 1962-03-12 | 1965-10-05 | Aeroprojects Inc | Transducer coupling system |
| DE19724732A1 (de) * | 1997-06-12 | 1998-12-17 | Heidenhain Gmbh Dr Johannes | Längenmeßsystem mit modular aufgebautem Maßstab |
| WO2004073914A1 (en) * | 1999-11-10 | 2004-09-02 | Asm Technology Singapore Pte Ltd. | Force sensing apparatus |
| US6640423B1 (en) * | 2000-07-18 | 2003-11-04 | Endwave Corporation | Apparatus and method for the placement and bonding of a die on a substrate |
| KR100773170B1 (ko) * | 2000-09-12 | 2007-11-02 | 언액시스 인터내셔널 트레이딩 엘티디 | 반도체 칩을 장착하는 방법 및 장치 |
| JP3885867B2 (ja) * | 2000-11-29 | 2007-02-28 | 日本電気株式会社 | ワイヤボンディング装置 |
| US6813225B2 (en) * | 2001-08-20 | 2004-11-02 | Asm Assembly Automation Limited | Linear motor driven mechanism using flexure bearings for opto-mechanical devices |
| US20040105750A1 (en) * | 2002-11-29 | 2004-06-03 | Esec Trading Sa, A Swiss Corporation | Method for picking semiconductor chips from a foil |
| US7305757B2 (en) * | 2004-03-15 | 2007-12-11 | Asm Technology Singapore Pte Ltd. | Die ejector system using linear motor |
| US7202956B2 (en) * | 2004-10-08 | 2007-04-10 | Asm Technology Singapore Pte Ltd. | Translation mechanism for opto-mechanical inspection |
-
2005
- 2005-10-14 US US11/250,270 patent/US7303111B2/en active Active
-
2006
- 2006-10-02 EP EP06020698A patent/EP1775753A3/en not_active Withdrawn
- 2006-10-11 CN CNB2006101408244A patent/CN100440426C/zh active Active
- 2006-10-11 MY MYPI20064310A patent/MY138793A/en unknown
- 2006-10-12 SG SG200607123-7A patent/SG131882A1/en unknown
- 2006-10-13 JP JP2006280417A patent/JP4689571B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10242175A (ja) * | 1997-02-28 | 1998-09-11 | Toshiba Mechatronics Kk | ペレットボンディング装置 |
| WO2004064124A1 (en) * | 2003-01-16 | 2004-07-29 | Koninklijke Philips Electronics N.V. | Chip transfer method and apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| CN1956144A (zh) | 2007-05-02 |
| EP1775753A3 (en) | 2009-01-07 |
| MY138793A (en) | 2009-07-31 |
| JP2007110136A (ja) | 2007-04-26 |
| US7303111B2 (en) | 2007-12-04 |
| SG131882A1 (en) | 2007-05-28 |
| EP1775753A2 (en) | 2007-04-18 |
| CN100440426C (zh) | 2008-12-03 |
| US20070084901A1 (en) | 2007-04-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4689571B2 (ja) | 軽量接合ヘッド組立体 | |
| SG194979A1 (en) | Overhead transport carriage | |
| US10340163B2 (en) | Mounting apparatus | |
| WO2007010971A1 (ja) | ステージ装置 | |
| US6805616B2 (en) | Wafer planarization apparatus and planarization method thereof | |
| US7146718B2 (en) | Apparatus for mounting semiconductors | |
| JP5705052B2 (ja) | ダイボンディング装置 | |
| JP2004103653A (ja) | ダイボンダ | |
| JP5762185B2 (ja) | ダイボンディング装置 | |
| JP4496007B2 (ja) | 半導体の実装装置 | |
| CN116207022A (zh) | 一种减振固晶结构及固晶设备 | |
| KR101584328B1 (ko) | 향상된 칩 이송 속도를 갖는 칩 이송장치 | |
| KR100310282B1 (ko) | 본딩 장치 | |
| JP4954652B2 (ja) | 精密部品の組み付け装置 | |
| JP6186053B2 (ja) | 実装装置 | |
| JP7543357B2 (ja) | ピックアンドプレース装置のための可撓性のピックアーム | |
| CN214956783U (zh) | 绑头固晶装置及固晶机 | |
| CN212848350U (zh) | 一种固晶焊头机构及其系统 | |
| CN113496931B (zh) | 一种硅片交接装置 | |
| CN219418976U (zh) | 贴合晶圆分离装置 | |
| KR101183093B1 (ko) | 다이 본더용 본드 헤드 모듈 | |
| WO2022244033A1 (ja) | 部品移載装置 | |
| CN114999991A (zh) | 超精密运动台的片爪 | |
| JPH0526740Y2 (ja) | ||
| JP2024068416A (ja) | 部品移載装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090909 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091027 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20100122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100921 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101221 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110118 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110216 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4689571 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140225 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |