JP4679729B2 - Cine高調波位相(harp)磁気共鳴画像法を用いた心臓動きのトラッキング - Google Patents
Cine高調波位相(harp)磁気共鳴画像法を用いた心臓動きのトラッキング Download PDFInfo
- Publication number
- JP4679729B2 JP4679729B2 JP2000613339A JP2000613339A JP4679729B2 JP 4679729 B2 JP4679729 B2 JP 4679729B2 JP 2000613339 A JP2000613339 A JP 2000613339A JP 2000613339 A JP2000613339 A JP 2000613339A JP 4679729 B2 JP4679729 B2 JP 4679729B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- strain
- spectral peak
- points
- harp
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 230000033001 locomotion Effects 0.000 title claims abstract description 139
- 238000002595 magnetic resonance imaging Methods 0.000 title claims abstract description 43
- 238000000034 method Methods 0.000 claims abstract description 127
- 230000003595 spectral effect Effects 0.000 claims abstract description 70
- 210000004165 myocardium Anatomy 0.000 claims abstract description 25
- 238000001208 nuclear magnetic resonance pulse sequence Methods 0.000 claims abstract description 19
- 210000005240 left ventricle Anatomy 0.000 claims description 25
- 230000008602 contraction Effects 0.000 claims description 9
- 238000005259 measurement Methods 0.000 claims description 9
- 238000001228 spectrum Methods 0.000 claims description 9
- 230000007423 decrease Effects 0.000 claims description 7
- 230000006872 improvement Effects 0.000 claims description 7
- 230000000977 initiatory effect Effects 0.000 claims 1
- 230000008569 process Effects 0.000 abstract description 12
- 230000008859 change Effects 0.000 abstract description 4
- 238000003384 imaging method Methods 0.000 description 35
- 238000013459 approach Methods 0.000 description 27
- 230000002107 myocardial effect Effects 0.000 description 26
- 238000004422 calculation algorithm Methods 0.000 description 23
- 238000006073 displacement reaction Methods 0.000 description 21
- 238000004458 analytical method Methods 0.000 description 20
- 238000004364 calculation method Methods 0.000 description 19
- 230000003287 optical effect Effects 0.000 description 19
- 239000013598 vector Substances 0.000 description 14
- 230000002861 ventricular Effects 0.000 description 14
- 230000006870 function Effects 0.000 description 13
- 210000001519 tissue Anatomy 0.000 description 13
- 230000000747 cardiac effect Effects 0.000 description 11
- 239000000463 material Substances 0.000 description 11
- 230000008901 benefit Effects 0.000 description 10
- 241000282472 Canis lupus familiaris Species 0.000 description 9
- 238000012545 processing Methods 0.000 description 9
- 238000002474 experimental method Methods 0.000 description 8
- 238000004904 shortening Methods 0.000 description 8
- 230000002123 temporal effect Effects 0.000 description 8
- 230000005415 magnetization Effects 0.000 description 7
- 239000011159 matrix material Substances 0.000 description 7
- JRWZLRBJNMZMFE-UHFFFAOYSA-N Dobutamine Chemical compound C=1C=C(O)C(O)=CC=1CCNC(C)CCC1=CC=C(O)C=C1 JRWZLRBJNMZMFE-UHFFFAOYSA-N 0.000 description 6
- 238000010009 beating Methods 0.000 description 6
- 229960001089 dobutamine Drugs 0.000 description 6
- 210000001174 endocardium Anatomy 0.000 description 6
- 230000002159 abnormal effect Effects 0.000 description 5
- 238000011161 development Methods 0.000 description 4
- 230000018109 developmental process Effects 0.000 description 4
- 239000000126 substance Substances 0.000 description 4
- 238000012360 testing method Methods 0.000 description 4
- 238000010200 validation analysis Methods 0.000 description 4
- 238000012800 visualization Methods 0.000 description 4
- 208000012661 Dyskinesia Diseases 0.000 description 3
- 230000004913 activation Effects 0.000 description 3
- 210000004369 blood Anatomy 0.000 description 3
- 239000008280 blood Substances 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000001914 filtration Methods 0.000 description 3
- 230000010016 myocardial function Effects 0.000 description 3
- 208000031225 myocardial ischemia Diseases 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 238000003672 processing method Methods 0.000 description 3
- 230000000541 pulsatile effect Effects 0.000 description 3
- 230000001052 transient effect Effects 0.000 description 3
- 241000282465 Canis Species 0.000 description 2
- 241000282412 Homo Species 0.000 description 2
- 230000001154 acute effect Effects 0.000 description 2
- 238000002059 diagnostic imaging Methods 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 238000005562 fading Methods 0.000 description 2
- 239000012634 fragment Substances 0.000 description 2
- 238000010191 image analysis Methods 0.000 description 2
- 208000028867 ischemia Diseases 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 208000010125 myocardial infarction Diseases 0.000 description 2
- 238000005457 optimization Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 206010061216 Infarction Diseases 0.000 description 1
- FYYHWMGAXLPEAU-UHFFFAOYSA-N Magnesium Chemical compound [Mg] FYYHWMGAXLPEAU-UHFFFAOYSA-N 0.000 description 1
- 241001465754 Metazoa Species 0.000 description 1
- 238000002940 Newton-Raphson method Methods 0.000 description 1
- 102100026827 Protein associated with UVRAG as autophagy enhancer Human genes 0.000 description 1
- 101710102978 Protein associated with UVRAG as autophagy enhancer Proteins 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 210000003484 anatomy Anatomy 0.000 description 1
- 238000013473 artificial intelligence Methods 0.000 description 1
- 230000003190 augmentative effect Effects 0.000 description 1
- 238000013184 cardiac magnetic resonance imaging Methods 0.000 description 1
- 210000001175 cerebrospinal fluid Anatomy 0.000 description 1
- 230000007012 clinical effect Effects 0.000 description 1
- 230000001427 coherent effect Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 208000029078 coronary artery disease Diseases 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 229910003460 diamond Inorganic materials 0.000 description 1
- 239000010432 diamond Substances 0.000 description 1
- 230000004069 differentiation Effects 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 230000002526 effect on cardiovascular system Effects 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 230000010247 heart contraction Effects 0.000 description 1
- 208000019622 heart disease Diseases 0.000 description 1
- 238000001727 in vivo Methods 0.000 description 1
- 230000007574 infarction Effects 0.000 description 1
- 230000002045 lasting effect Effects 0.000 description 1
- 229910052749 magnesium Inorganic materials 0.000 description 1
- 239000011777 magnesium Substances 0.000 description 1
- 230000005389 magnetism Effects 0.000 description 1
- 238000004137 mechanical activation Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000008450 motivation Effects 0.000 description 1
- 210000003205 muscle Anatomy 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 238000012805 post-processing Methods 0.000 description 1
- 238000000718 qrs complex Methods 0.000 description 1
- 238000011002 quantification Methods 0.000 description 1
- 230000010410 reperfusion Effects 0.000 description 1
- 230000003362 replicative effect Effects 0.000 description 1
- 230000029058 respiratory gaseous exchange Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 210000002186 septum of brain Anatomy 0.000 description 1
- 238000010008 shearing Methods 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000000638 stimulation Effects 0.000 description 1
- 230000009897 systematic effect Effects 0.000 description 1
- 210000002435 tendon Anatomy 0.000 description 1
- 230000008719 thickening Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
- 230000009012 visual motion Effects 0.000 description 1
Images



































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/055—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves involving electronic [EMR] or nuclear [NMR] magnetic resonance, e.g. magnetic resonance imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7235—Details of waveform analysis
- A61B5/7253—Details of waveform analysis characterised by using transforms
- A61B5/7257—Details of waveform analysis characterised by using transforms using Fourier transforms
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/563—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution of moving material, e.g. flow contrast angiography
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/45—For evaluating or diagnosing the musculoskeletal system or teeth
- A61B5/4519—Muscles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/563—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution of moving material, e.g. flow contrast angiography
- G01R33/56308—Characterization of motion or flow; Dynamic imaging
- G01R33/56333—Involving spatial modulation of the magnetization within an imaged region, e.g. spatial modulation of magnetization [SPAMM] tagging
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S128/00—Surgery
- Y10S128/92—Computer assisted medical diagnostics
- Y10S128/922—Computer assisted medical diagnostics including image analysis
Landscapes
- Health & Medical Sciences (AREA)
- Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- High Energy & Nuclear Physics (AREA)
- Animal Behavior & Ethology (AREA)
- Signal Processing (AREA)
- Radiology & Medical Imaging (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Psychiatry (AREA)
- Artificial Intelligence (AREA)
- Mathematical Physics (AREA)
- Physiology (AREA)
- Vascular Medicine (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
Description
(関連出願との相互参照)
本出願は、1999年4月22日に出願された米国特許仮出願シリアル番号第60/130,595号の利益を主張する。
【0002】
(政府の支持)
本発明は、国立衛生研究所授与番号第R29HL47405号および全米科学財団授与番号第MIP93−50336号によって少なくとも一部は支持された。
【0003】
(発明の背景)
1.発明の分野
本発明は、磁気共鳴画像化を使用して心臓の動きを測定することに関し、より具体的には、心臓における物質点の追跡およびラグランジアンひずみを計算するために磁気共鳴画像化を使用して獲得される高調波位相画像(harmonic phase image)を使用するプロセスに関する。
【0004】
2.従来技術の説明
興味領域内の核を励起し、そして受信機によって受け取られ、場合によってはコンピュータ手段によって処理され、その後で結果が記録され、結果のハードコピーを表示または生成する磁気エネルギーの応答放出を引き起こすために働くRFパルスおよび傾斜パルスを交互に生成する磁場内に、患者または対象が置かれる磁気共鳴画像化の有利な使用は、長い間公知であった。概して、Atalar−McVeighの米国特許第5,512,825号およびConturo−Robinsonの米国特許第5,281,914号を参照されたい。その両方は、本発明の所有者に譲渡され、その開示は、参照により本明細書中に明確に援用される。
【0005】
磁化の空間変調(SPAMM)アプローチを介して磁気共鳴画像化で、2次元の心臓壁の動きを画像化する場合に、画像面に直交する方向にある2組のタグ付面を使用することは、公知である。米国特許第5,054,489号、ならびに第5,111,820号、および5,217,016号を参照されたい。また、Axel et al.,「MR Imaging of Motion with Spatial Modulation of Magnetization」 Radiology,171:841−845,1989、およびAxel et al.,「Heart Wall Motion:Improved Method of Spatial Modulation of Magnetization for MR Imaging」 Radiology,172(1):349−350,1989を参照されたい。
【0006】
タグ特徴を探知し、そしてその後で、その特徴を、使用されている引き続いての補間を伴う変位およびひずみに関する詳細な動きのマップ内へ結合するために、画像処理技術を使用することは、磁気共鳴のタグ付に関連して公知である。例えば、Young et al.,「Three−Dimensional Motion and Deformation with Spatial Modulation of Magnetization」 Radiology,185:241−247,1992、およびMcVeigh et al.,「Noninvasive Measurements of Transmural Gradients in Myocardial Strain with MR Imaging」 Radiology,180(3):677−683,1991を参照されたい。これらのアプローチは、自動化されていない。なぜならいくつかの手動による変調作業が必要であるから。
【0007】
磁気共鳴タグ付画像シーケンスに関するオプティカルフローの方法を使用することも公知である。概して、Prince et al.,「Motion Estimation from Tagged MR Image Sequences」 IEEE Trans. on Medical Imaging,11(2):238−249,June 1992、Gupta et al.,「On Variable Brightness Optical Flow for Tagged MRI」 Technical Report,95−13,JHU/ECE,1995、およびGupta et al.,「Bandpass Optical Flow for Tagged MR Imaging」 Proceedings of the IEEE International Conf. on Image Proc.,Santa Barbara,1997を参照されたい。そのようなアプローチにおいて、正弦波状タグパターンが、飽和面(saturated plane)の代わりに使用される。画像輝度傾斜は、画像のペアから推定される一時的な微分と共に、「オプティカルフロー」と一般的に呼ばれる密な動きの推定を提供するために使用され得る特徴である。そのようなアプローチは、輝度傾斜は傾斜の方向だけの動きについての情報を含むという事実を補償するための調整を必要とする。
【0008】
米国特許第5,275,163号は、対象の一部の動きをモニターする場合の磁気共鳴画像化の使用を開示している。パルスおよび傾斜シーケンスは、空間的に異なるタグ付パターンおよび差し引き像をタグ付画像を形成するために使用、ペアで適用される。
【0009】
米国特許第5,352,979号は、スライスまたはボリュームにおけるボリューム要素の位相角応答を観察すること、および外部刺激によって引き起こされる摂動前および中に生じる画像化を開示している。
【0010】
米国特許第5,379,766号は、タグ付パターンの検出についての高コントラストタグ付グリッドを使用することによって、対象の一部の量的な動きの推定を開示している。
【0011】
米国特許第5,315,248号および第5,545,993号は、動きの追跡を開示している。
【0012】
磁気共鳴画像化において平面タグ分析を使用することは公知である。心筋の動き分析と関連してこのようなアプローチを使用することもまた、公知である。そのような従来の技術は、通常、変位ベクトルまたはひずみパターンを介して、これらの画像から動きを抽出することを含み、そして後に補間されるタグ特定および位置推定を含む。
【0013】
位相コントラスト磁気共鳴画像化はまた公知である。これは、速度に敏感な属性を測定すること、および有限差分を使用して計算されたひずみを有する速度場を再構築することによって、動きを直接測定するための方法を提供する。これら2つのアプローチに関する課題の1つは、平面タグ付画像は、自動的には正確に分析され得ないことである。位相コントラスト画像は、自動的に分析され得るが、信号対雑音比が低くなりがちであり、許容し難い結果になる。
【0014】
心筋におけるひずみ測定は、心臓病の診断および定量化において重要であり得ることは公知である。タグ付心臓磁気共鳴画像化におけるこの10年間にわたる発展で、インビボでの心臓の心筋層の詳細なひずみパターンを測定することが可能となった。MRタグ付は、心筋層の「タグ」と呼ばれる一時的特徴を生成するために、被験者の長軸に沿う磁化を空間的に変調するための特別なパルスシーケンスを使用する。タグ付MRIは、正常なおよび異常な心筋の動きのモデルを開発しおよび洗練するために、心筋の動きの異常と冠状動脈病の相互関係をよりよく理解するために、心筋梗塞の治療の効果を理解するためペースメーカーを使用する心臓の活動化パターンを分析するために、および虚血性心疾患を初期に探知するためのストレステストと結びついて、使用されてきた。科学的取り組みが成功しているにもかかわらず、タグ付MRIは、長い画像化ならびに後の処理時間、画像化中の患者への不適切なアクセスおよび臨床医および同僚によるMR処理の恩恵の理解の欠如のせいで、普通の臨床使用になることが遅かった。
【0015】
(発明の要旨)
本明細書中に使用される「角度画像」という言葉は、SPAMMタグ付磁気共鳴画像における孤立したスペクトルピークに対応する画像の位相を言う。この言葉はまた、高調波位相画像またはHARP画像と本明細書中では呼ばれる。
【0016】
本発明は、磁気共鳴画像化による対象の動きの測定方法を含み、パルスシーケンスが、対象の空間変調された興味領域に適用され、そして空間変調された対象のフーリエ領域からの少なくとも1つの第一のスペクトルピークが獲得される。獲得された第一のスペクトルピークの逆フーリエ変換情報が計算され、そして第一の高調波位相画像が、スペクトルピークの各々から計算される。このプロセスは、各第二のスペクトルピークから第二の高調波位相画像を生成するために、異なる時間に関して繰り返され、そしてひずみが、第一および第二の高調波画像から決定される。
【0017】
本方法は、心臓の動きを追跡するのに特に有用であり、そして1つのアプローチにおいて、円周方向および半径方向のラグランジアンひずみ両方を決定することを含む。好適な実施形態において、SPAMMパルスシーケンスが使用される。
【0018】
1つのアプローチにおいて、タグ磁気共鳴画像のCINEシーケンスを介して、明白な動きの追跡が使用される。
【0019】
磁気共鳴画像化を使用して心臓の動きを追跡する改良された手段を提供することが、本発明の目的である。
【0020】
正確におよび高速で動作するそのようなシステムを提供することが本発明のさらなる目的である。
【0021】
点の動きを追跡する高調波位相磁気共鳴画像化を使用する方法を提供し、そしてそれによって異なる時間に取られた点の画像のシーケンスを比較することによって心臓の部分内のひずみの決定を容易にすることが、本発明のさらなる目的である。
【0022】
時間を追って物質点の動きを正確に追跡する高調波位相画像シーケンスを使用して、心臓の解剖学的組織および心臓と共に動くタグ付特徴の両方の画像化を可能にし、そしてそれによってラグランジアンひずみの決定を可能にするようなシステムを提供することが、本発明のさらなる目的である。
【0023】
対象のタグ付磁気共鳴画像を使用して、対象の動きの素早いそして正確な視覚化のための改良された方法を提供することが本発明の目的である。
【0024】
SPAMMタグ付磁気共鳴画像における孤立したスペクトルピークを使用するような方法を提供することが、本発明の別の目的である。
【0025】
角度画像が、フーリエ変換情報の2つ以上のスペクトルピークから獲得され、そして面ひずみまたはテンソルひずみの計算を提供するために使用されるようなシステムを提供することが本発明のさらなる目的である。
【0026】
角度画像を使用してそのような計算が自動的におよび素早く行われ得るようにすることが、本発明のさらなる目的である。
【0027】
従来の磁気共鳴画像を生成する必要なくフーリエデータから直接角度画像を生成することが本発明のさらに別の目的である。
【0028】
本発明のこれらおよび他の目的が、本明細書に添付の図面を参照して本発明の次の説明から、より十分に理解される。
【0029】
(好適な実施形態の説明)
本明細書中に使用される場合、「患者」という言葉は、人類を含む動物界の生きている一員を意味する。
【0030】
本明細書中に使用される場合、「対象」という言葉は、本発明の方法によって動きについてモニタされている患者ならびに他のすべての項目およびそれらの部分を含む。医療使用の中には、心壁、心筋および心腱の動きを測定する場合の使用がある。モニタされる対象は、例えば血液または脳脊髄液などの流体、あるいは固体または半固体、あるいはそれらの組合せであり得る。
【0031】
図1−7(b)の次の記載は、本出願において開示されそして請求された本発明に関する背景的情報を提供し、そして本発明者らの米国特許出願シリアル番号第09/131,589号の主題である。この従来の出願は、物理的に仮出願シリアル番号第60/130,595の一部であって、そしてそこから本出願へ移行される。図1−7(b)に関連しての図8−18の記載中の「角度画像」の表現は、「高調波位相画像」または「HARP画像」と表現する。
【0032】
タグ付磁気共鳴画像化(MRI)は、虚血または梗塞形成によって引き起こされる心臓の動きの欠陥を探知およびモニタする標準的アプローチに急速になっている。Zerhouni et al.,「Human Heart:Tagging with MR Imaging − A Method for Noninvasive Assessment of Myocardial Motion」 Radiology,Vol.169,No.1,pp.59−63,1988、McVeigh et al.,「Noninvasive Measurements of Transmural Gradients in Myocardial Strain With MR Imaging」 Radiology,Vol.180,No.3,pp.677−683,1991、Moore et al.,「Calculation of Three−Dimensional Left Ventricular Strains from Biplanar Tagged MR Images」 Journal of Mag. Res. Imaging,Vol.2,pp.165−175,Mar/Apr 1992を参照されたい。タグ付MRIは、所定のパターン中の心臓内および周囲の組織の磁気特性を一時的に変化させるためにMRスキャナを使用し、組織は、次に心臓およびパターンの両方がゆがみを受ける場合に、画像化され得る。そうして生じる画像のシーケンスにおけるゆがんだパターンの分析は、心壁内の心筋の動きについての情報を生成する。画像分析は、通常特徴抽出方法を使用して行われるが、光フロー法も検討されてきた。Fischer et al.,「True Myocardial Motion Tracking」Mag.Res.in Medicine,Vol.31,pp.401−413,1994、Denney et al.,「Reconstruction of 3−D Left Ventricular Motion from Planar Tagged Cardiac MR Images: An Estimation Theoretic Approach」IEEE.Trans.Med.Imag.,Vol.14,No.4,pp.625−635,1995、Prince et al.,「Motion Estimation from Tagged MR Image Sequences」 IEEE Trans. on Medical Imaging,Vol.11,pp.238−249,June 1992、Amartur et al.「A New Approach to Study Cardiac Motion: The Optical Flow of Cine MR Images」Mag.Res.Med.,Vol.29,No.1,pp.59−67,1993、およびGupta et al.,「Bandpass Optical Flow for Tagged MR Imaging」Proccedings of the IEEE International Conf. on Image Proc.,Vol.3,pp.364−367,(Santa Barbara),1997もまた参照されたい。
【0033】
平面のゆがみの密な推定は、従来の特徴抽出および光フロー法を使用することなく、SPAMMタグ付画像から直接生成され得る。Osman et al.「Direct Calculation of 2D Components of Myocardial Strain Using Sinusoidal MR Tagging」Proccedings of SPIE’s International Symposium on Medical Imaging,(San Diego,USA),1988、Axel et al.,「MR Imaging of Motion with Spatial Modulation of Magnetization」 Radiology,Vol.171,pp.841−845,1989、およびAxel et al.,「Heart Wall Motion:Improved Method of Spatial Modulation of Magnetization for MR Imaging」 Radiology,Vol.172,No.1,pp.349−350,1989を参照されたい。このアプローチは、SPAMMパターンについての信号モデルおよび動きを基本的な搬送周波数の角度変調と解釈することに依存する。本発明は、非常に小さな変位(エラー変位など)を推定し、タグ線を統合し、およびオプティカルフローを計算する場合に直接有用であり得る。
【0034】
SPAMMタグ付磁気共鳴画像は、フーリエ領域における明白なスペクトルピークの集合を有する。各スペクトルピークは、特定の方向の動きについての情報を含む。帯域通過フィルタを使用することによって抽出され、これらのピークの1つの逆フーリエ変換は、その位相が実際の動きの方向成分に線形に関連する複素画像である。この位相画像は、前に本明細書で定義した「角度画像」である。この位相画像は、(標準逆アークタンジェント演算子の働きによって)[−π、π)の範囲にあるよう制限される。これは、角度ラッピングアーティファクト(angle−wrapping artifact)である。角度ラッピングアーティファクトは存在するが、角度画像は、タグパターンを統合するために使用され得、そして角度画像のペアは、小さな変位フィールド、調整を必要としない画像ペア間のオプティカルフロー、ならびに2次元および3次元のひずみを測定するために使用され得る。
【0035】
心臓は、2次元または3次元の1−1SPAMMタグパターンを使用して拡張末期において、繰り返しタグ付される。タグ付パルスシーケンスは、左心室が血液で一杯であり、心臓が相対的にゆっくり動き、そしてECG信号のQRS群が存在する心臓周期の一部である拡張末期で課される。推定の目的のために、拡張末期は、t=0なる時刻とみなされ得、拡張末期における心臓内の点の位置は、物質座標系として扱われ得る。連続した心臓シーケンス中、k空間は、フーリエ空間における9の主要なスペクトルローブのうち少なくとも1つを含むフーリエ変換情報を獲得するために、標準定常状態傾斜エコー画像化パルスシーケンスを使用してスキャンされる。2つ以上のスペクトルピークが画像化される場合、帯域通過フィルタは、1つのピークの情報だけを抽出するために適用される。このデータの逆フーリエ変換は、共役対称操作を行うことなく、行われる。共役対称操作を行うことは、MR画像化においては通例である。その結果生じる複素画像の角度は、角度画像を形成する。
【0036】
傾斜エコー磁気共鳴画像化によってスキャニングを使用する代わりに、スピンエコー、らせん磁気またはエコー面磁気共鳴画像化などの代わりの公知の手段が、例えば使用され得ることが理解される。
【0037】
1次元の1−1SPAMMタグパターンは、α度パルスを適用し、それに続いて画像面内で横断勾配パルス(transverse gradient pulse)を適用し、それに続いて別のα度パルスを適用し、さらにタグパターンの完成させるためにクラッシャ傾斜(crasher gradient)を適用することによって、生成され得る。これにより、コヒーレント水平磁化が不要になる。1D1−1SPAMMパターンは、各々異なる周波数で生じ結果として1D1−1SPAMMタグ付画像のフーリエ変換における3つのスペクトルピークが存在することになる3つの複素画像の合計である。2次元の1−1SPAMMパターンは、2つの1D1−1SPAMMシーケンスを急速に連続して適用することによって生成され得る。この結果は、そのような画像中に9つのスペクトルピークに結果的になる9つの複素画像の合計である2次元 1−1SPAMMタグ付画像となる。3次元の1−1SPAMMパターンは、3つの1D1−1SPAMMパルスシーケンスを急速に連続して適用することによって生成され得る。この結果は、そのような画像のフーリエ領域において27個のスペクトルピークの結果になる27個の複素画像の合計である3次元の1−1SPAMMタグ付画像となる。一般的に、複素画像およびタグ付画像中のスペクトルピークの数は、SPAMMパルスシーケンスの数および特性に依存する。合成された、またはシミュレートされた2次元1−1SPAMMパターンは、リング型の対象に適用され、図1に示されており、そしてそのフーリエ領域の大きさは9のスペクトルピークを示す図2に示されている。
【0038】
これらのスペクトルピークの存在は、搬送高調波を提供するタグプロセスのコンテキスト内で理解され得る。搬送高調波は、画像を空間的に振幅変調させ、それゆえに、対応するスペクトルピークを搬送高調波の位置へと移動させる。
【0039】
数学的コンテキストでこれを置き換えると、時間tに撮られたタグ付けされたMR画像は、y1が出力方向で、且つy2が位相エンコーディング方向である画像平面において、任意の点、y=[y1y2]Tにて、輝度値を与える、Ψ(y,t)により表され得る。スペクトルピークの存在ゆえに、画像Ψ(y,t)は和として書かれ得る。
【0040】
【数1】

【0041】
画像Ψkは、複素画像であり、すなわち、マグニチュード(Dk)および位相(φk)を有する。故に、
【0042】
【数2】
【0043】
その角度画像は
(3) ak(y,t)≡∠Ψk(y,t), k=−K,...,K
を使用して、複素画像から計算され得る。ここで、
【0044】
【数3】
【0045】
【数4】
【0046】
【数5】
【0047】
例えば、図2で丸で囲まれたスペクトルピークから計算された角度画像が、図3に示されている。この画像の鋸歯パターンは、範囲[−π,π)に包み隠される複素数量の角度の結果として生じる。
【0048】
角度画像は、いくつかの非常に有用な以後の分析の基礎となり得る。第1に、画像はタグ付けされたMRI画像における通常の2次元タグに類似した総合タグを生成するために使用され得る。この特徴の利点は、データが完全に自動的に生成され、且ついかなる所望のタグ分類を用いても生成され得ることである。第2に、画像は、オブジェクトの小さな変位を直接計算するために使用され得る。第3に、角度画像は、2次元画像面における2次元のゆがみ、または3次元における完全な3次元ゆがみテンソルを直接計算するために使用され得る。これらのゆがみデータは、心筋虚血および心筋梗塞の検出およびそれらを量で表すときに有用である。第4に、角度画像は、時系列の変位フィールドを表す標準的なオプティカルフローフィールドを形成するために使用され得る。
【0049】
図4および5は、小さな変位のための、計算された変位および実際の変位をそれぞれ示す。計算されたフィールドおよび真の変位フィールドの類似性は、角度画像の動きが、動きを再構築するに効果的であることを示している。
【0050】
画像の統合タグ付の線にとって、シングル角度画像、ak(y,t)が採用され得る。タグ付の線は、
(5) ak(y*,t)=a
を満たす点{y*}の集合である。
【0051】
図6は、図3の角度画像から生成されるタグ付の線を示す。角度画像を使用して総合タグ付の線を生成することには、いくつかの利点がある。第1に、完全な自動プロセスであることである。第2に、よい等輪郭(isocontour)アルゴリズムがこの属性を有しているように、タグ付の線がサブピクセル解画像度を有することである。第3に、全画像が、例えば、左右双方の心室心筋を含むなど、自動的に識別されるこれらのタグを有することである。最後に、範囲[−π,π)内のN値を選択することによって、Nタグ付の線が、空間的期間2π/wk以上の範囲において、統合されることである。原則的には、これらのタグ付の線がどのぐらい接近して間隔を開けられ得るかを制限するものは基本的にない。これは、これらのタグ付の線が互いにどのぐらい接近しているかのという特徴に対する検出可能性によって制限されないからである。
【0052】
小さな変形では、画像作成面に存在する2本の直線の独立したベクトルwkおよびwlの2つの角度画像(akおよびal)は、
【0053】
【数6】
【0054】
【数7】
θkは、パルスシーケンスから決定される既知の角度であり、Wは
(8) W(φ)=mod(φ+π,2π)−π
によって与えられる非線型ラッピング関数(wrapping function)である。ここで関数x(y)は、
(9) x(y)=y1h1+y2h2+x0=Hy+x0
を使用して、画像平面座標システムの任意の点yを、磁気3次元座標システムの位置x ε IR3にマッピングさせる。ここで、行列H ε IR3×2 = [h2h2]であり、ベクトルh1 ε IR3および、ベクトルh2 ε IR3は、それぞれ画像平面の読み出しおよび位相エンコーディング方向を表し、x0 ε IR3は、画像原点である。行列W ε IR3×2= [w1w2]である。
【0055】
モニターされている動きの大きさを最小化する方法はたくさんあり、これらは比較的小さな動きに対し実行される本発明の方法を容易にする。例えば、1つの方法は、心臓が実質的に動く機会を得る前に、心弛緩終期後、即画像を作成することである。このアプローチは、収縮期の最初の数10ミリ秒において、有用であり、且つ潜在的および臨床的に重要である。第2に、低周波タグパターンが使用される場合、タグパターンの物理期間がだんだん大きくなり、動きは角度のあいまい性(ラッピング)を生じない。これを選択した際の潜在的困難性は、低周波パターンのスペクトルピークが別のスペクトルピークと干渉し、所望されない動きのアーティファクトが生じることである。第3のアプローチは、心弛緩終期およびそのすぐ後の画像から、固定の補正値でタグパターンを適用することである。この場合、タグパターンを急速に動く組織へ適用することが必要である。最後に、この問題を回避する方法は、タグ付け時間からの変位ではなく、画像時間の間の変位を画像作成することである。これらの変位は小さい。このアプローチは、古くは「オプティカルフロー(optical flow)」と呼ばれる。
【0056】
ゆがみは組織に隣接する部分間の変位差に関する。これは、2本の直線的で独立したベクトルwkおよびwlの、少なくとも2つの角度画像である(akおよびal)から直接計算され得る。e方向での2次元のゆがみは、
【0057】
【数8】
【0058】
【数9】
【0059】
【数10】
【0060】
オプティカルフローは、画像シーケンスにおける輝度パターンの明らかな動きとして定義される。概略は、E.C.Hildrethの「Measurement of Visual Motion」、MIT Press、Cambridge、1984年を参照されたい。現在のコンテキストにおいては、「明らかな」という語は、真の3次元の動きではなく、画像平面の動きを示唆する。従来技術のコンテキストにおいて、オプティカルフローの定義は、速度フィールドを含み、概してこの速度フィールドの緻密な推定を得るために、ある種の規則化が必要である。概略は、Hornらの「Determining Optical Flow」、Artificial Intelligence、17:185−203、1981年を参照されたい。本発明のコンテキスト内における角度画像の使用により、規則化を使用することなしに、速度フィールドを直接計算することが可能である。
【0061】
角度画像をオプティカルフロー方法に適用するために、直線で且つ独立したベクトルwkおよびwlを有した、少なくとも4つの角度画像ak(y,t)、al(y,t)、ak(y,t+Δt)、およびal(y,t+Δt)が採用され得る。2つの画像間の時間間隔、Δt>0は、時間間隔における一定の動きの速度v2を仮定するのに十分小さいことが好ましい。2次元の動きの速度は
【0062】
【数11】
(14) Δtak(y)≡W[ak(y,t+Δt)−ak(y,t)]
である。
【0063】
図7aおよび7bを参照すると、図7aは1−1SPAMMタグを備えた左心室を示す断面図である。図7bは、本発明の方法により作成される図7aの左心室の断面図の角度画像を示す。
【0064】
図8から18および関連する開示に例示されるような本発明は、タグ付けされた心臓の磁気共鳴画像シーケンスの迅速な分析のための画像処理方法を提供する。この方法は、心臓の動きに関する情報を含むSPAMMタグの磁気共鳴画像における分離されたスペクトルピークの使用を含む。SPAMMスペクトルピークの逆のフーリエ変換は、複素画像であり、その画像の計算された角度は高調波位相(HARP)画像と呼ばれる。この方法は、2つのHARP画像シーケンスを使用し、自動的且つ正確に時間的に物質点を追跡する。1実施形態において、迅速な、半オートメーション化されたプロシージャは、これらの痕跡を使用し、周囲ゆがみおよび放射状ゆがみ双方を含むラグランジュのゆがみを計算する。これらの方法は、2次元のコンテキスト内で開発されたが、3次元で使用され得る。この新しい計算アプローチにより、スキャン完了後約5〜10分内の迅速な分析および可視化が可能となる。その性能は、MR画像シーケンスに示され得、正常な心臓の動きおよび異常な心臓の動きの双方を反映する。
【0065】
タグ付けされた心臓の磁気共鳴画像における過去10年間の主な開発(Zerhouniらの「Human heart:Tagging with MR imaging−−a method for noninvasive assessment of myocardial motion」、Radiology、169(1):59−−63、1988年、Axelらの「MR imaging of motion with spatial modulation of magnetization」、Radiology、171:841−−845、1989年、McVeighらの「Cardiac tagging with breath−hold cine MRI」、Magn.Res.Med.、28:318−−327、1992年、Fischerらの「Improved myocardial tagging contrast」、Magn.Res.Med.、30:191−−200、1993年、Atalarらの「Minimization of dead−periods in MRI pulse sequences for imaging oblique planes」、Magn.Res.Med.、32(6):773−−777、1994年12月、およびFischerらの「True myocardial motion tracking」、Magn.Res.Med.、31:401−−413、1994年)により、ビボ心臓における心筋の詳細なゆがみパターンを測ることが可能になった。(Youngらの「Three−dimensional motion and deformation of the heart wall:Estimation with spatial modulation of magnetization −− a model−based approach」、Radiology、185:241−−247、1992年、Mooreらの「Calculation of three−dimensional left ventricular strains from biplanar tagged MR images」、J.Magn.Res.Imag.、2(2):165−−175、1992年3月/4月、Parkらの「Analysis of left ventricular wall motion based on volumetric deformable models and MRI−SPAMM」、Med.Image Anal.、1(1):53−−71、1996年、Denney,Jr.らの「Model−free reconstruction of three−dimensional myocardial strain from planar tagged MR images」、J.Magn.Res.Imag.、7:799−−810、1997年、およびE.R.McVeighの「Regional myocardial function」、Cardiology Clinics、16(2):189−−206、1998年)MRタグ付けは、特別なパルスシーケンスを使用し、被験体の縦方向の磁化を空間的に変調し、心筋内にタグと呼ばれる一時的な機能を作り出す。すぐだめになる勾配エコー画像作成技術は、CINEシーケンスを作成するために使用され、心臓の解剖、および心臓と共に動くタグ機能の双方の動きを示す。異なる方向且つ異なる時間から撮られた多くの画像におけるタグ機能の動き分析は、3次元における物質点を追跡するために使用され得、心筋内のゆがみパターンの詳細なマップを導く。概略は、E.R.McVeighの「Regional myocardial function」、Cardiology Clinics,16(2):189−−206、1998年およびE.R.McVeighの「MRI of myocardial function:motion tracking techniques」、Mag.Res.Imag.、14(2):137、1996年を参照されたい。
【0066】
タグ付けされたMRIは、最近の多くの医学研究および科学調査において、著しく目立ってきた。タグ付けされたMRIは、正常および異常な心筋の動きのモデルを発展および精錬するために(Mooreらの「Calculation of three−dimensional left ventricular strains from biplanar tagged MR images」、J.Magn.Res.Imag.、2(2):165−−175、1992年3月/4月、E.R.McVeighの「MRI of myocardial function:motion tracking techniques」、Mag.Res.Imag.、14(2):137、1996年、Clarkらの「Circumferential myocardial shortening in the normal human left ventricle」、Circ.、84:67−−74、1991年、McVeighらの「Noninvasive measurements of transmural gradients in myocardial strain with MR imaging」、Radiology、180(3):677−−683、1991年、およびLugo−Olivieriらの「The effects of ischemia on the temporal evolution of radial myocardial deformation in humans」、Radiology、193:161、1994年)、異常な心筋の動きがある、冠状動脈疾患の相関関係をよりよく理解するために(McVeighらの「Imaging asynchronous mechanical activation of the paced heart with tagged MRI」、Magn.Res.Med.、39:507−−513、1998年)、ペースメーカーを使用して心臓の活性化パターンを分析するために(Limaらの「Segmental motion and deformation of transmurally infarcted myocardium in acute postinfarct period」、Am.J.Physiol.、268(3):H1304−−12、1995年)、心筋梗塞後の処置の効果を理解するために(Croisilleらの「Combined dobutamine stress 3D tagged and contrast enhanced MRI differentiate viable from non−viable myocardium after acute infarction and reperfusion」、Circ.、92(8):I−−508、1995年)、心筋虚血の早期発見のためのストレステスト(Budingerらの「Cardiac MR imaging:Report of a working group sponsored by the national heart,lung,and blood institute」、Radiology、208(3):573−−576、1998年)心臓のMRIのための動機)と共に使用されてきた。これらの成功した使用例にもかかわらず、タグ付けされたMRIは日常的臨床使用に参入するのにかなり時間がかかっている。これは一部には、長い画像作成および後処理時間、画像作成の間の患者への不十分なアクセス、MR処理および臨床家およびその提携者による利益に関する理解の欠如のためである(Youngらの「Tracking and finite element analysis of stripe deformation in magnetic resonance tagging」、IEEE Trans.Med.Imag.、14(3):413−−421、1995年9月)。
【0067】
概して、タグ付けされたMR画像の処理および分析は、3つの段階へと分けられ得る。その3つの段階は、(1)2次元画像で左心室(LV)心筋を見つけ、(2)LV壁内のタグ機能の位置を推定し、(3)これらの測定からゆがみフィールドを推定することである。準自動化されたアプローチが同様に提案されてきてはいるが(T.S.Denneyの「Identification of myocardial tags in tagged MR images without prior knowledge of myocardial contours」、In J.DuncanおよびG.Gindi、編集、Proc.Inf.Proc.Med.Imag.、ページ327−−340、1997年)、多くの既知のアプローチが、心内膜および心外膜の完全な手作業の輪郭取りに頼っている(Aminiらの「Coupled B−snake grids and constrained thin−plate splines for analysis of 2次元 tissue deformations from tagged MRI」、IEEE Trans.Med.Imag.、17(3):344−356、1998年6月、およびGuttmanらの「Tag and contour detection in tagged MR images of the left ventricle」、IEEE Trans.Med.Imag.、13(1):74−−88、1994年)。最近の研究はまた、完全に自動化された輪郭取りも示唆してきている(Kerwinらの「Tracking MR tag surfaces using a spatiotemporal filter and interpolator」、Int.J.Imag.Sys.Tech.、10(2):128−−142、1999年)。ほとんどの場合、輪郭取りの結果は、タグ機能の推定段階において必要であり、この推定段階には、いくつかの利用可能な準自動化された方法(Aminiらの「Coupled B−snake grids and constrained thin−plate splines for analysis of 2次元 tissue deformations from tagged MRI」、IEEE Trans.Med.Imag.、17(3):344−−356、1998年6月、およびT.S.Denneyの「Identification of myocardial tags in tagged MR images without prior knowledge of myocardial contours」、In J.DuncanおよびG.Gindi、編集、Proc.Inf.Proc.Med.Imag.、ページ327−−340、1997年)、ならびに完全な自動化にとって恐らく非常に有望な、新しいアルゴリズム(Kerwinらの「Tracking MR tag surfaces using a spatiotemporal filter and interpolator」、Int.J.Imag.Sys.Tech.、10(2):128−−142、1999年、およびMoultonらの「Spline surface interpolation for calculating 3D ventricular strains from MRI tissue tagging」、Am.J.Physiol.(Heart Circ.Physiol.)、270:H281−−H297、1996年)がある。
【0068】
タグ付けされたMR画像処理の第3ステージである、ゆがみ推定は、主に補間および分化計算であり、有限要素法を含む、文献に記載のいくつかの方法(McVeighらの「Noninvasive measurements of transmural gradients in myocardial strain with MR imaging」、Radiology、180(3):677−−683、1991年、Aminiらの「Coupled B−snake grids and constrained thin−plate splines for analysis of 2次元 tissue deformations from tagged MRI」、IEEE Trans.Med.Imag.、17(3):344−356、1998年6月、およびO’Dellらの「Three−dimensional myocardial deformations:Calculations with displacement field fitting of tagged MR images」、Radiology、195:829−−835、1995年)、グローバルポリノミアルフィッティングアプローチ(global polynomial fitting approach)(Denneyらの「Reconstruction of 3D left ventricular motion from planar tagged cardiac MR images:An estimation theoretic approach」、IEEE.Trans.Med.Imag.、14(4):625−−635、1995年)、ならびにいわゆるモデル無し確率論的推定アプローチ(model−free stochastic estimation approach)(Denney,Jrらの「Model−free reconstruction of three−dimensional myocardial strain from planar tagged MR images」、J.Magn.Res.Imag.、7:799−−810、1997年、およびKerwinらの「Cardiac material markers from tagged MR images」、Med.Image Anal.、2(4):339−−353、1998年)がある。タグ表面を推定する方法(O’Dellらの「Three−dimensional myocardial deformations:Calculations with displacement field fitting of tagged MR images」、Radiology、195:829−−835、1995年、Aminiらの「Flexible shapes for segmentation and tracking of cardiovascular data」、In Proc.IEEE Int.Conf.Image Proc.、ページ5−−9、IEEE Comp.Soc.Press、1998年、およびOsmanらの「Direct calculation of 2次元 components of myocardial strain using sinusoidal MR tagging」、In Proc.SPIE Med.Imag.Conf.、1998年2月」San Diego)は、タグ識別およびゆがみ推定の間にある中間段階を表す。これらのタグ付けされたMRI処理方法の間にある明らかな差にもかかわらず、それらはすべて2つの要となる制限を共有する。すなわち、タグつけされたMRI処理方法は、完全に自動化されておらず、且つ緻密なゆがみ推定を形成するために、補間を必要とする。本発明はこれらの関心の双方を取り扱う。
【0069】
本発明は、高調波位相(HAPR)画像作成と呼ばれる、タグ付けされたMR画像の分析への新しいアプローチを記載してきた(Osmanらの「Motion estimation from tagged MR images using angle images」、In Proc.Int.Conf.Imag.Proc.、Volume 1、ページ704−−708.Comp.Soc.Press、1998年、Chicago、Osmanらの「Imaging heart motion using harmonic phase MRI」、1998年10月」提出、およびShinnarらの「Inversion of the Bloch equation」、J.Chem.Phys.、98(8):6121−−6128、1993年4月)。このアプローチは、SPAMMタグパターンに基づいており(Axelらの「MR imaging of motion with spatial modulation of magnetization」、Radiology、171:841−−845、1989年)、SPAMMタグパターンは、基礎を成す画像を振幅変調し、フーリエドメインにずらりと並んだスペクトルピークを生成する。これらのスペクトルピークのそれぞれは、組織の動きの特定の構成要素に関する情報を伝える。この情報は、位相変調方法を使用して抽出され得る。Shinnarらの「Inversion of the Bloch equation」、J.Chem.Phys.、98(8):6121−−6128、1993年4月には、統合タグ付の線を再構築し、小さな変位フィールドを計算し、およびオイラーゆがみ画像を計算する、シングルショットHARP画像分析技術と呼ばれ得るものが記載されている。これらの方法は、心周期内でのシングル位相(時間フレーム)のみからのデータを必要とするが、限られている。なぜならば、これらの方法は、動きの物質的性質を計算し得ないからである。本発明において、この方法は画像シーケンス−CINEタグ付けされたMR画像を採用し得、画像シーケンスは、好適には、物質点追跡技術およびこれらの追跡された点を使用して、周辺ゆがみおよび放射状ゆがみを含むラグランジュゆがみを計算する方法の双方を含む。
【0070】
本発明において提案される方法は、速く且つ完全に自動化されており、迅速に収集され得るデータを使用する。これらの方法は、2次元画像に直接のみ適用する。この結果、推定された動きの量は、3次元の動きから2次元平面への投影を表し、推定された動きの量は「明らかな」動きとして考えられるべきである。本方法は、3次元画像へと拡張され得るが、緻密なデータ獲得方法が採用される。本方法は、即座の臨床効果を有すべきである。これは、その方法が、自動であり、そして周辺ゆがみが、左心室の動きの分析において特に重要であるからである。
【0071】
第1のSPAMMタグ付け方法を考察すると、I(y,t)で、画像座標 y=[y1 y2]T、且つ時間tの際のタグ付けされた心臓MR画像の強度を示す。犬の心臓の異常な動きを示す典型的な画像が、図8(a)に示されている。左心室(LV)が画像中心で輪のように見えている。タグ付けの効果は、タグパターンによって、基礎を成す画像の増加として記載され得る。図8aにあるパターンは、1次元SPAMMタグパターン(グリッド)であり(Axelらの「MR imaging of motion with spatial modulation of magnetization」、Radiology、171:841−−845、1989年)、これはある基本振動数を有する有限の余弦級数として書かれ得る(M.E.Gurtin、「An Introduction to Continuum Mechanics」、Academic Press、Inc.、1981年)。このパターンを増加することによって、基礎を成す画像の振幅変調が生じ、フーリエ変換を図8bに示されるようなパターンへと複製する。フーリエ空間におけるスペクトルピークの位置は、SPAMMタグパルスシーケンスによって決定される基本タグ振動数の整数倍である。
【0072】
スペクトルピークの2次元パターンは、2次元のSPAMMタグパターンを使用して生成され得る。本発明の方法はこの場合においても利用され得る。
【0073】
静的なHARP画像法(Osmanらの発表された「Imaging heart motion using harmonic phase MRI,October 1998.」, Shinnar et al.,「Inversion of the Bloch equation,」J.Chem.Phys.,98(8):6121−−6128,April 1993)は、帯域通過フィルタを使用し、一定のタグ方向において通常最低次の高調波周波数である周波数ωkに集中しているk番目のスペクトルピークを切りはなす(isolate)。帯域通過フィルタは通常、リンギング(ringing)を減少させるために滑らかにロールオフする端(edges)付の楕円形サポート(elliptical support)を有する。図8(b)に描かれた輪郭は、この場合は円であるが、このデータを処理するために使用される帯域通過フィルタの−3dBの等輪郭を示す。一旦フィルタが選択されると、回転されたバージョンを使用して垂直タグ付の画像を処理することを除いて、全ての画像のシーケンスにおいて同じフィルタが使用される。Shinnar et al.,「Inversion of the Bloch equation,」J.Chem.Phys.,98(8):6121−−6128,April 1993において、最適な実施のためのフィルタの選択が、議論される。帯域通過領域の逆フーリエ変換により、
【0074】
【数12】
【0075】
マグニチュード画像Dk(y,t)は、心臓のジオメトリの変化とタグフェージングによる画像強度の変化の両方を反映する。図8(c)は、図8(b)のフィルタを使用して図8(a)から抽出された高調波マグニチュード画像を示す。フィルタリングプロセスによる不鮮明を除いて、その基本画像のように基本的には見える。高調波マグニチュード画像にタグパターンがないために、高調波マグニチュードオ画像を使用して、組織を背景と区別するための断片を提供し得る。単純な閾値を使用して、未加工の断片を提供し得る。ここで、その閾値は、拡張末期と収縮末期の両方の時点で手動で選択され、これらの時間の間で線形補間される。
【0076】
位相画像φ(y,t)は、ωkの方向の心筋の動きの詳細図を提供する。原理的に、Ikの位相は、実部で虚部を割ったアークタンジェントを使用することによって計算され得る。Ikの符号を説明すると、この計算の固有の範囲は、例えば、C、Fortran、またはMATLABの演算子atan2を使用して、[−π,−π)に拡張され得る。しかし、これによると、一般的に実際の直線全体の値を示す実際の位相でなく主値のみが生成される。この主値は、ak(y,t)によって示され得る;それは、
【0077】
【数13】
【0078】
【数14】
【0079】
akまたはφkのどちらかが高調波位相(HARP)画像と呼ばれ得る。この表現は、φkでなくakに一般に使用され、データからそれを直接計算し、視覚化し得る。その2つは混同されるかもしれないが、φkを高調波位相と呼び、akを高調波位相角度と呼ぶ。図8(b)でアウトラインが示されるスペクトルピークに対応するHARP角度画像が図8(d)に示される。明瞭さのために、それは、図8(c)のマグニチュ−ド画像の生の断片を使用して作れられたマスクで表示される。
【0080】
図8(d)のHARP画像を注意深く調べると、ラッピングされたアーティファクトによる鋭い転位によって垂直方向に妨げられた強度傾斜がわかる。これらの転位の位置は、図8(a)のタグ付の線とほとんどかなり一致し、両方は、収縮期の間に生じる心筋の動きを反映している。HARP画像の強度傾斜は、実際、元の画像において十分明白な情報以上の濃密な動きの情報を含む。例えば、HARP角度画像の計算された等輪郭は、任意に分離した心筋中のタグ付の線を生成し得る(Osman et al.,「Imaging heart motion using harmonic phase MRI」,October 1998 および Shinnar et al,「Inversion of the Bloch equation.」J.Chem.Phys., 98(8):6121−−6128,April 1993)。基本的な原理は、高調波位相およびHARP角度の両方は、タグ付の組織という材料の性質ということである;それゆえ、質点は、その動きを通じてそのHARP角度を保持する。これは、動きについてHARPトラッキングの基本である。
【0081】
タグ付のパルスシーケンスについての「見かけ上の」動きの問題に移ると、タグ付の勾配は、一般に画像平面において適用される。この場合、拡張末期の画像に生じるタグ付の線は、図9(a)に示されるように、実際に画像平面に直交するタグ面の一部である。高調波位相は材料の特性であるので、拡張末期に同じ高調波位相φを有する一組の点はまた、画像平面に直交する平面であり、単に別のタイプのタグ面であると考えられ得る。拡張末期で同じHARP角度aを有する一組の点は、ただ1つの平面ではなく平行平面の集合を含む。これは、次のセクションで説明するHARPトラッキングにおいて問題を引き起こす。見かけ上の動きを説明するために、高調波位相φによって与えられる固有の関係が考えられる。
【0082】
水平なタグ画像および垂直なタグ画像の双方を与えられると、拡張末期の同じ2つの高調波位相を有する一組の点は、単一の点で交差する画像平面に直交する線を含むことが図9(a)から明らかである。図9(b)に示されるように、タグ面が動き下でひずみ、それによってこの線を曲線に歪ませる。動きについての緩い仮定の下で、この曲線はまだ、1つの点で画像を交差する。次いで、この点は、拡張末期で対応する点と関連し、画像平面内の見かけ上の動きを表示し得る 見かけ上の動きが、q(y,t)によって示される見かけ上の参照マップを使用して数学的に説明され得る。この関数は、点を(同じ2つの高調波位相を有するという意味において)yが見かけ上の拡張末期にあった画像平面内に与える。q(y,t)が、拡張末期の真の3次元の質点の位置を画像平面に直交に投影したものであることが図9から明らかに示され得る。見かけ上の2次元の動きを計算するには制限があるが、その計算は、真の3次元の動きと非常によく似た関係を有する。ひずみ等の見かけ上の動きから導出された動きの量は、等しく厳密な方法による真の3次元量に関係し得る。
【0083】
CINEタグ付の磁気共鳴画像のHARP処理は、(1)画像平面の質点の見かけ上の動きのトラッキングと、(2)そのようなトラッキングされた点からのラグランジアンひずみの計算を含む。コンパクトな式にするために、ベクトル表示を使用する。詳細には、ベクトルφ=[φ1 φ2]T、およびa=[a1 a2]Tが定義され、それぞれ高調波画像I1およびI2についての一対の高調波位相画像およびHARP角度画像を説明する。
【0084】
HARPトラッキングにおいて、高調波位相は直接計算できないので、その主値であるHARP角度が、計算で使用される。多くの点が同じ一対のHARP角度を有する画像平面にあることが即座に結論される。2つのHARP角度を有する所与の質点に対して、同じHARP角度を共有する点の内の1つのみが正しくマッチングしたものである。すなわち、それはまた、同じ一対の高調波位相を共有する。見かけ上の動きが1つの画像から次の画像まで小さい場合、最近接のこれらの点が正しい点であることは明らかである。本発明の方法は、タグ付のMR画像のCINEシーケンスを介して見かけ上の動きをトラッキングする。位置がymで、時間がtmの質点を仮定する。ym+1が、時間tm+1でのこの点の見かけ上の位置である場合、
【0085】
【数15】
【0086】
【数16】
【0087】
【数17】
【0088】
式(20)の直接的な用法にはいくつかの実際的な問題がある。第1の問題はφが利用できないことであり、その代わりにaを使用しなければならない。幸い、φを含む式をaを含む式で置き換えるのは比較的簡単である。akの勾配は、勾配の大きさが理論的に無限−−実際には非常に大きい(図8(d)参照)、ラッピングアーティファクト以外はΦkの勾配と同じであることは式(16)から明らかである。πをakに加え、再度ラッピングすることによって、1/2の空間距離だけラッピングアーティファクトをシフトさせ、それによってこの勾配が結果的にΦkの勾配に等しくなることは、式(16)から明らかである。結果として、Φkの勾配は、akおよびW(ak+π)の勾配の(大きさにおいて)小さいものに等しい。形式的に、これは、
【0089】
【数18】
【0090】
【数19】
【0091】
【数20】
【0092】
式(20)の使用について第2の問題は、式φ(y(n),tm+1)−φ(ym,tm)の計算であり、この計算は、それのラッピングされたバージョンである高調波位相だけでなく位相自体も分からないのでほとんど不可能と思われる。しかし、k=1,2、|φk(y(n),tm+1)−φk(ym,tm)|<π(微小な動きを仮定)に関して、
【0093】
【数21】
【0094】
【数22】
【0095】
式(25)に基づいてアルゴリズムを実行する際に考慮するいくつかの問題がある。第1に、位相ラッピングのために、その解はもはや固有ではない;実際、両方の方向におけるほぼタグ期間(tag peirod)毎にa(y,tm+1)=a(ym,tm)を満たす解が期待され得る。それゆえ、「よい」初期の点で開始することおよび間違った解に向かうのを防ぐためのステップサイズを保持することの両方が望ましい。従って、y(0)=ymでアルゴリズムを初期化すること且つ1ステップを1画素の距離に制限することが望ましい。第2の問題は、任意のyに対してa(y,tm+1)の推定を行わなければならない。直線の双一次補間は通常、働く;しかしこの場合、ラッピングアーティファクトが誤った結果を引き起こす。これらの誤りを防ぐために、yの近傍のaのローカル位相非ラッピング(local phase unwapping)を実行し、非ラッピング角度を双一次補間し、次いでその結果をラッピングし、補完されたHARP角度を作成する。最後に考慮すべきことは、判定基準を止めることである。以下の2つの判定基準が使用される:(1)計算された角度が望ましい目標HARPベクトルに十分近いかまたは(2)反復カウントが超えられるか。
【0096】
これらをまとめて考慮すると、1つの時間フレームに1つの点を次の時間フレームのその見かけ上の点までトラッキングするアルゴリズムが即座に定義され得る。画像シーケンス全体を介して点をトラッキングするHARPトラッキングアルゴリズムを定義するのを容易にするために、より一般的なフレームワークでこのアルゴリズムを変換することは有用である。従って、その方法では、yinitは、検索が開始される初期化であると考え、a*が目標HARPベクトルであると考える。時間tm+1におけるその見かけ上の位置まで時間tmの点ymをトラッキングするために、yinit=ym,a*=a(ym,tm)と設定し、最大反復カウントNを求め、次いで以下のアルゴリズムを実行する:
(アルゴリズム1(HARP目標設定)n=0とし、y(0)=yinitと設定する)
1.
【0097】
【数23】
【0098】
【数24】
2.適切な補間手順を使用してステップの方向
【0099】
【数25】
3.ステップサイズ
【0100】
【数26】
4.推定値である
y(n+1)=y(n)+α(n)v(n)
を更新する。
5.増分nを増分し、工程1に行く。
【0101】
画像シーケンスを介して点をトラッキングするために、HARP目標設定がシーケンスの各画像にうまく適用される。正しく見かけ上の動きを見出す好適なアプローチは、全体のシーケンスを介して目標HARPベクトルを同じに、すなわち元の点のHARPベクトルと等しいように維持することであり、シーケンスにおいて以前に推定された見かけ上の位置にHARP目標設定を初期化することである。これにより、同じHARP角度を有する連続した点を生成し、一般に所望の解に近いHARP目標設定で使用された初期の点を維持することによって間違った解に向かうのを避ける。形式的にこのアルゴリズムを説明するために、時間tj+1,tm+2・・・・・の全ての画像を通じて時間tjのyjをトラッキングすることを所望すると仮定する。
【0102】
HARPトラッキングは、以下のアルゴリズムにより与えられる。
【0103】
(アルゴリズム2(HARPトラッキング)a*=a(yj,tj),
【0104】
【数27】
(HARP目標設定に対する)最大反復閾値Nを選択する。
1.
【0105】
【数28】
2.アルゴリズム1(HARP目標設定)を適用し、それによって
【0106】
【数29】
3.mを増分し、工程1に進む。
HARPトラッキングは使用され、それにより時間の順方向と厳密に同じ方法で時間の逆方向で点をトラッキングし得る。それゆえ、任意の時間の任意の画像の点を特定し、順方向と逆方向の両方に点をトラッキングし、それによって空間と時間において任意の点の完全なトラジェクトリを与えることが可能になる。
【0107】
ラグランジアンひずみを判定する際に、参照時間t=0が拡張末期であると仮定する。HARPトラッキングは、(利用可能な画像倍の集合に対して)時間tでの質点の位置yに対するt=0での質点qをトラッキングし(このセクションにおいて、全ての位置の量を「見かけ上の」位置と呼ぶ)得る。これにより動きマップy(q,t)の推定値を提供する。y(q,t)を使用して、有限の違いを使用して任意の質点qおよび時間tの変形勾配テンソル
【0108】
【数30】
【0109】
2つの質点qiおよびqjの動きを考える。1単位の伸びまたは単純なひずみが
【0110】
【数31】
【0111】
これらの利点を利用するために、心筋内の同心円上の点をトラッキングし、領域性の動径方向および円形ラグランジアンひずみ(circumferential Lagrangian strain)を計算するアプローチが実行された。単純なユーザインターフェースは、図10に示すようにLV壁内の3つの同心円の配置を可能にする。これらの円は、第1に心室の中心(長軸の位置)上でクリックし、次いで心外膜に対する1つの円および心内膜に対する別の円をドラッグすることによって手動で配置される。3番目の円は、これら2つの円の間の中間に自動的に配置される。通常、円は拡張末期の画像で定義されるが、LVの断面がより円形であり得るので、収縮末期の画像を使用してそれらを定義するのがより容易である。16個の等間隔の点が各円の外周の周りに自動的に定義され、アルゴリズム2(HARPトラッキング)を使用して48点全てが(時間の順方向または逆方向に)トラッキングされる。
【0112】
ひずみは、時間フレームを通じて隣接する点間の距離が変化するのを測定することによって計算される。円は、拡張末期に、収縮末期に、またはその間の任意の時点に定義されるかどうかに関わらず、拡張末期の画像フレームは、物質標準として使用される。同じ円にある点間の距離の変化が円形ひずみに対応する。動径方向の点間の距離の変化は動径方向ひずみに対応する。3つの同心円状があるので、心内膜、心外膜、および中間壁の円形周囲ひずみおよび心内膜および心外膜の動径方向ひずみが計算され得る。ノイズを幾分か低減し、それによって提示を単純化するために、円は、8個の八分円に分けられ、計算されたひずみは、これらの各八分円で平均化された。慣習により、八分円は、図10に示されるように隔壁の中心から時計方向に番号付けされた。その結果、生じるひずみは、時間と八分円の両方の関数としてプロットされ、それに断面図内の心臓の動きを空間時間的に表示する。
【0113】
上記の手順は、点の集合をトラッキングする工程を含む。その工程は、各点にアルゴリズム2を独立して適用することによってうまく達成され得る。しかし、場合によっては心筋の大きな動きまたは画像アーティファクトにより、ある時間フレームで点が誤った目標に収束する(タグジャンプ)ことが起こり得、同様に、連続したフレームで誤ったトラッキングが生じることになる。本発明は、1つ以上の正確にトラッキングされた点を使用する改良手順を使用し、それによって誤ってトラッキングされた点のトラッキングを訂正する。
【0114】
上述したように、アルゴリズム2は、トラッキングされた点の以前に推定された位置で初期化される。しかし、2つの時間フレームの間の平面内の動きが非常に大きい場合、この初期点は正確な解から非常に離れ、誤った点に収束し得る。改良は、アルゴリズム2に対するよりよい初期化についての体系だった識別に基づく。所与の円にある1つの点は、全てのフレームを通して正確にトラッキングされてきたと証明され得ると仮定する。発明者らの実験において、動きが相対的に小さい隔壁のそのような点が常に見出されてきた。
【0115】
この点は、円にある他の全ての点の初期化および、所望ならば3つの円にある全ての点の初期化を改善し得、全体にわたって集約されたトラッキング結果を改良し得る「アンカー」として使用される。
【0116】
正確にトラッキングされたアンカーから始めることで、円に隣接する点の1つとアンカーをつなぐ線セグメントにある1画素未満に分けられた点のシーケンスが定義される。アンカーは、いくつかの特定の時間に点yまでトラッキングされると仮定する。この点が正確にトラッキングされると仮定することによって、そのアンカーに近い点の正確なトラッキングの結果がyに近くなる。従って、yは、アルゴリズム2の初期点として使用され、シーケンスの最初の点をトラッキングする。次いで、この結果は、シーケンス上の第2の点等に対する初期点として使用される。円上のアンカーの第1の隣接する点に達することによって、誤った結果に収束し、タグをジャンプさせる機会はない。隣接する点は、新しいアンカーとして役に立ち、その手順は、円上の全ての点がトラッキングされるまで円上の次に隣接する点に対して繰り返される。
【0117】
改良は、動径方向の経路に沿って円の「橋渡し」をし、3つ全ての円をうまく補正するために使用され得る。一般に、タグジャンプ誤りは、自由壁でのみ起こり、改良が計算的に要求されるにしたがって、その演算は一般に一定の時間では1つの円に抑制される。所望ならば、チェックして、円は、元のアンカーの周囲をトラッキングすることによって、完全なものになり得る。その結果が異なる場合、総計としての誤りがあり、円を再定義することが望ましい。タグフェージングまたは他の画像アーティファクトによりこのタイプの総計としての誤りが生じ得るが、平面外の動きによってこのタイプの総計としての誤りがさらに生じ易くなる。平面外の動きにより、画像化される実際の組織は変化する。この場合、トラッキングされた点に対応する高調波位相角度をもたらす画像平面上に組織が存在することはあり得ない。要約すると、タグが消え、HARPトラッキングアルゴリズムは、正確なHARP角度を有する別の点に簡単に収束する。左心室の動きとジオメトリとの間の特定の関係のために、これは大した問題ではない。問題は、左心室の境界近くでより生じ易いので、それにより課される主な制限は、心外膜または心内膜の非常に近く円を配置してはならないことである。
【0118】
(実施例)
本発明の方法の効率性を確認するために、正常の心臓と異常な心臓の両方についての実験が、犬と人間の両方を含む試験について行われた。異常に拍動する犬のデータセットが、ドブタミンの応力下にある正常な人間の心臓からのデータと同様に得られた。HARPトラッキングと従来技術の周知のタグ付トラッキング法(tag tracking method)の間の質的な比較が為された。
【0119】
(実施例1)
HARPトラッキングの性能を示すために、電気的に拍動させた犬の心臓についてのタグ付画像のセットが使用された。これらのデータは、タグ付磁気共鳴画像法および分析技術を使用した、電気的に拍動させる活性化下での心臓の動きの研究において、以前に使用された。実験手順およびその結果についての十分な説明が、Lima等の「Segmental motion and deformation of transmurally infarcted myocardium in acute postinfarct period.」Am.J.Physiol.,268(3):H1304−−12,1995において与えらている。この結果は、完全な3次元において見かけ上の動きおよびひずみを説明するのでなく、1つの断面積上の見かけ上の動きおよびひずみのみを説明する。しかし、本発明で得られた結果はLima等による方法の結果とほとんど同じであるが、Lima等による方法にかかる時間のほんの一部(a fraction of the time)で生成される。これは、本発明の方法を使用することにより結果が正確かつ短時間で生成されるという利点を示してる。
【0120】
拍動リード(pacing lead)が、犬の心臓の左心室の基底自由壁(basal free wall)内に配置された。ソフトウェアリリース4.7(General Electric Medical Systems,Milwaukee,WI)を備えた標準的な1.5Tスキャナで、磁気共鳴画像法が実行された。6msのSPAMMパルスシーケンスが心筋についてのタグ付パターン(tag pattern)を生成するように使用され、そのタグ付パターンは画像平面の中で5.5mmで分けられた平行面飽和帯(parallel plane saturation bands)を含む。パルスシーケンスにタグ付けすることがペーサー(pacer)からの信号でトリガーされ、パルスにタグ付けした後3msでパルスシーケンスの画像化が開始する。画像スキャン変数は、以下の通りである:TR=6.5ms、TE=2.1、読み出し帯域=±3.2kHz、320mmの視野、256×96の獲得マトリックス(acquisition matrix)、部分的エコー、動画フレーム当たり2つの読み出しおよび6mmスライスの厚さ。
【0121】
1つは水平タグであり、残りは垂直タグである20タグ付MR短軸画像の2つのシーケンスは、心臓が収縮してる間に14ms間隔で獲得された。画像は、断片化されたk空間獲得(k−space acquisition)により息を止めてる間に獲得された。拍動リードの位置に近い基底面(basal plane)において獲得された画像が使用された。図11は、視覚化のためにLVの周囲の関心ある領域でクロップされた結果として生じる画像を示す。強い初期の収縮は、約5時(5 o’clock)に拍動リードの近くで見られ得る。フレーム4〜8において、中隔壁(septal wall)が外向きに曲がってるのが見られ、それは中隔領域への電気的な活性化信号の遅延により引き起こされるプリストレッチング(pre−streching)と呼ばれる異常な動きである。この後、LV心筋全体が、収縮期を通じてほとんど正常に連続的に収縮することを経験する。
【0122】
HARPトラッキングにおいて、HARP画像は、図8(b)に示される帯域通過フィルタを使用して水平タグ付画像シーケンスから計算された。このフィルタを90°回転させたバージョンが、垂直HARP画像を計算するために使用された。HARPトラッキング(アルゴリズム2)を示すために、1つは垂直であり、残りは水平である2つのタグ付の線が選択され、それぞれのタグ点の収集が手動で選択された。これらの点の位置、および後に3回にわたる時点で個々にトラッキングされたこれらの位置が、図12に示される。1つだけ例外はあるが、全ての点は、タグを消去した後にさえ点を見るのを期待する箇所にトラッキングされた。詳細には、正常な収縮の内部「反り(bowing)」および異常なプリストレッチングの外部「反り」が、HARPトラッキングによって非常によく取り込まれる。間違ってトラッキングされた点のみが、図12(d)の画像の上部に見られ得る。画像を注意深く調べることによって、平面の外での動きにより、第1の時間のフレームのLVの上部にあるタグ付の水平線が長い間に消えることがわかる。改良によって解決されない間、このタイプの問題は、心筋の境界にそれほど近くない点を選択することによって避けられ得る。
【0123】
HARPトラッキングがタグ付の線の点に限定されないことおよび圧力テンソルを計算するためのポテンシャルを示すために、1画素(1.25mm)によって分けられる点の5×5グリッドが、図13(a)に示されるように、LVの前横方向側の4つのタグ付の線によって境界を付けられた領域に配置された。これらの点は、全ての画像シーケンスを介してそれぞれにトラッキングされた。図13(b)〜(c)は、時間フレーム1,5,10,20でそれらの位置を示す拡大図を示す。トラッキングされた点に対する副画素の解像度がより後の画像において明瞭に示され、ひずみの基本的なローカルパターン(local pattern)を明瞭に見ることができる。四角形からひし形というグリッドの明確な発展によって、正常な心臓が動きする際に動径方向に厚くなることおよび円形方向に短縮することの両方が大変明瞭に示される。このデータからひずみテンソルを計算するために差分が容易に使用され得ることはトラッキングされた点の規則性から明らかである。これから、主なひずみ(principle straints)の局所領域変化および方向を含む動きに関する様々な量が計算され得る。
【0124】
次に、領域ラグランジアンひずみは、アルゴリズム2の後で説明された手順を使用して計算された。ユーザインターフェースを使用して、心外膜および心内膜の円(circles)が定義された。収縮末期にLVはほとんど円形なので、図11の最後の画像が、これらの円を定義するように使用された。結果として生じる3つの円および定義された八分円が、図14(a)に示される。それぞれの円の16個の点が、拡張末期まで後方にトラッキングされ、結果として図14(b)に示される形となった。歪んだ状態のシーケンス全体が、図14(c)に示される。このシーケンスから、LVの断面積の形状がいくらか伸張し始めるが、急速に円形になり、次いでほとんど動径方向に収縮するのがわかる。そのようなタグのジャンプが、1つ以上の時間フレームにおいて非常に歪んだ輪郭を描くので、図14に誤ってトラッキングされた点はないことを確認にするのは容易である。
【0125】
ラグランジアンひずみプロフィールは、アルゴリズム2において以下で説明されるように図14(c)に示されたトラッキングされた点から計算された。各八分円における動径方向のひずみについての時間的発展が、図15(a)で示される。正の値は、心筋の厚みが増加するのを示し、負の値はその厚みが薄くなるのを示す。初期の時点で心筋の厚みが増加することは八分円3〜6のみで明らかであり、八分円8、1および2は厚みが薄くなるのを示す。これは、初期に拍動リード近くの心筋で生じる大きな収縮と反対の壁(wall)での心筋のプリストレッチングの両方の直接的な表現である。時間フレーム5〜10の間で、再収縮して拡張末期で厚さが最も大きく増加するその前に、八分円5〜7の拍動リード近くの心筋は弛緩する。心内膜の厚さの増加がより大きい八分円7を除いて、心外膜と心内膜の動径方向のひずみの間にほとんど違いはない。
【0126】
図15(b)は、各八分円内の円形ひずみの時間的発展を示す。正の値は、円形方向に伸張するのを示し、負の値は収縮を示す。これらのプロットは、動径方向のひずみのプロフィールに示されるような同一の一般的な振る舞いを示す。八分円4〜6における初期の時点での収縮が短縮(shortening)として示され、これと同じ期間内に八分円8、1および2は大きく伸張してるのを示す。いくらかの期間の後に、全ての心筋組織は収縮性の短縮(contractile shortening)を示す。これらのプロットはまた、心外膜より大きく短縮する中間壁に比べて一貫してより大きく心内膜が短縮を有するのを示す。これは、収縮する間の左心室の心筋の公知の振る舞いと一致する(Clark et al., 「Circumferential myocardial shortening in the normal human left ventricle.」Cric.,84:67−−74,1991)。
【0127】
(実施例2)
この実施例は、ドブタミン−誘導の(5μg/kg/min)心臓の応力を経験してる正常な男性ボランティア(27歳)の心臓の動きのHARPトラッキングの使用を含む。この実施例は、ドブタミンの応力下のこの心臓の非常に急速な動きおよび誤ってトラッキングされた点を補正するためのHARP改良の使用を含む。
【0128】
その画像は、上述の犬の試験と同じ基礎的な画像手順を使用して同じ磁石で獲得された。SPAMMタグが、7mmで分けられた画像平面に直交する飽和平面(saturation planes)を作成するために拡張末期で生成された。垂直タグおよび水平タグを備える画像の2つのセットが、個別に息止めしてる際に獲得された。4つのスライスが獲得されるが、この実施例では中間壁の基本的なスライスのみが使用される。スキャナの設定は以下のようである:視野36cm、タグ分離7mm、8mmのスライスの厚さ、TR=6.5ms、E=2.3ms、15°チップ角度、256×160画像マトリックス、動画フレーム当たりの5位相−符号化されたビュー。
【0129】
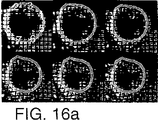
図16(a)は、LVの周囲の関心のある領域に関する、共に加算され、クロップされた結果として生じる水平タグおよび垂直タグ付の画像を示す。これらの画像に生じる輪郭は、HARPトラッキングを使用する時間内に、心外膜および心内膜の円を第1の画像に手動で配置し、それらを順方向にトラッキングすることによって生成された。第1および第2の時間フレームの間の大きな動きのために、前自由壁(anterior free−wall)のいくつかの点が、第2のフレームにおいてトラッキングされなかった。基礎的なHARPトラッキングアプローチは、現在のフレームにおける初期化として以前にトラッキングされた点を使用するので、残りのフレームにおいて、この残りは補正されなかった。隔壁内の手動で識別された3つのアンカー(各円に1つ)を使用してHARP改良を適用する結果が、図16(b)に示される。見て調べると、改良された結果により、各時間フレームで予想される箇所にトラッキングされた点が配置されたのが理解され得る。タグジャンプが排除される。
【0130】
改良されたトラッキングの結果を使用して、各四分円での円形ひずみの時間的発展が計算された。その結果は、図16(c)に示される。これらのプロットは、自由壁において最大かつ持続性のある短縮を伴うLV中のかなり画一的な短縮を示す。これらはまた、正常な筋肉において一般に生じるような心内膜中に生じる最大の短縮を示す。
【0131】
公知の従来技術の方法と量的な比較をするために、FindTagsとして知られる公知の技術の基礎である適切なフィルタリングと比較してHARPトラッキングの精度についての2つの予備調査が行われた(T.S. Denney,「Identification of myocardial tags in tagged MR images without prior knowledge of myocardial contours,」In J. Duncan and G.Gindi,editors,Proc.Inf.Proc.Med.Imag.,pages 327−−340,1997)。画像のノイズ比(CNR)との対比に依存して、FindTagsの精度が0.1〜0.2画素の範囲であることが、理論およびファントム確証(phantom validation)の両方によって示される(Mooreら.,「Tagged MR imaging in a deforming phantom:photographic validation,」Radiology,190:765−−769,1994)。その結果により、HARPの精度が、適合したフィルタリングアプローチより同じまたはより優れていることが示される。
【0132】
次に、正常な人間という対象からのデータを使用してタグ付の線を見出すことに注意が向けられた。FindTagsは、垂直なタグ付の短軸のデータセットからの27個の画像において輪郭(心外膜および心内膜)およびタグ付の線の両方を推定するために使用された。その27個の画像は、LV内の3つの長軸方向の位置からの9つの画像シーケンスを含む。HARP画像は、図8(b)に示されたものと同様の第1の高調波および帯域通過フィルタを使用してこれら9つの画像から生成された。理論によると、タグの底は、πラジアンの位相角度で配置され、それによって、HARP画像のπ等輪郭(isocontours)が、FindTagsによって識別されるタグ点に非常に近接することになると予測される。図17(a)では、タグのかなりの消去が生じる心室の中間についての7つの時間フレームで撮られた画像におけるこれらのHARP等輪郭に、FindTagsからのタグ点が重ね合わされる。
【0133】
FindTagsを使用して推定されたHAPR等輪郭とタグ輪郭の間はわずかな違いしかない。HARPは非常に小さく滑らかな結果を生成し、主な違いが、自由壁(3時)上のHARPによる結果の周りの小さな揺らぎとなる。どれが視覚的に満足に値するかを決定するのは難しい。FindTagsタグ点の収集全体を使用して計算された平均HARP角度が、非常にπ(3桁の数(three significant digits))に近く、それによってタグの底がπというHARP角度を有するという理論的予測を証明する。ローカル位相非ラッピング(unwrapping)は、HARP画像のラッピング(wrapping)アーティファクトの位置に正確にπが対応する場合、この平均角度を計算するために使用された。
【0134】
精度についての量的な測定を実行するために、同じ画像における各タグ点と最近接のHARPπラジアン等輪郭(π radian isocontour)との間の距離が計算された。全時間と空間的位置にわたる平方二乗平均(rms)距離が、約0.15画素である。基底の、中間の心室の、短軸の先端の画像に対して、時間の関数として平均距離がプロットされて、図17(b)に示される。FindTagsは現実を表す場合、HARPは、約0.15〜0.25画素誤りを有すると結論され得る。これらの平均距離はFindTagsの固有の誤りと同じオーダーであるので、この結論は引き出すことは正しい。実際、HARPは大きく誤りを減少させ得、その場合には、これらの距離はFindTagsの固有の誤りを簡潔に表示してる。しかし、FindTagsの誤りに加えて、HARPがこの誤りを有し、その場合にはHARPは約0.3画素平均誤りを有する可能性もまたある。HARPトラッキング誤りは、FindTagsの誤りとほとんど同じであると結論される。
【0135】
HARPトラッキングは同時に2つのHARP画像を使用し、それによってタグ付の線自体よりタグ付の線の交差の認識の方がより容易になる。結果として、この実験では、HARPトラッキングは、FindTagsを使用するタグ付の線の交差の推定と比較された。本明細書中で説明された拍動する犬の心臓のデータを使用して、FindTagsは、20の画像基底短軸画像シーケンス(20−image basal short−axis image sequence)における垂直と水平の両方の全てのタグ付の線の位置を計算するように使用された。心内膜および心外膜の輪郭を使用して、またFindTagsの使用を推定され、心筋内部に落ち込む(falling)タグ付の線の交差点が計算された。HARPトラッキングは、次いで、ターゲットベクトルa=[ππ]Tラジアンを求め、第1の時間フレームを含むこれら各々の点で実行された。
【0136】
FindTags交差点とHARPトラッキングされた点の間の平方二乗平均距離が、図18に時間の関数として示される。これらの誤りは、以前の実験よりいくらか大きい。これは、1つの線の代わりに2つの線を求める場合、誤りが
【0137】
【数32】
【0138】
図18に示されるプロットにおいて、興味ある特徴の1つは、時間フレーム4〜7において「こぶ(hump)」が生じることである。HARPで使用される帯域通過フィルタの設定(placement)により、これを説明することが可能である。収縮期の間に正常な心臓な動きは収縮するので、基本的なタグ高調波(the fundamental tag harmonic)のローカル周波数は一般的に増加する。また、タグが消えるにつれて第1の高調波の周りのスペクトルとの干渉が生じるので、エネルギー的にDCスペクトルピークが増加する。それゆえ、わずかに高い周波数に帯域通過フィルタを設定したり、収縮に関連するその高い周波数スペクトルを同時に取り込んだり、DCスペクトルピークからの干渉を避けるために通常は使用される。しかし、フレーム4〜7では、図11および図15に見られ得るように、プリストレッチング現象が最もはっきりしており、これによりタグのローカル周波数は増加ではなく減少する。わずかに高い違いの原因およびおそらく誤りを増加させる原因となるスペクトルのこの部分は、フィルタでカットオフされ得る。
【0139】
上述の実験では、HARPトラッキング方法およびラグランジアンひずみ計算法(Lagrangian strain computations)を包含する全ての計算が、MATLAB(The Mathworks、Natick MA)を使用して400MHzのIntel Pentium(R) IIプロセッサで実行された。MATLABコードを最適化(例えば、ループをなくすこと)しない事実にも関わらず、HARP処理は、知られてる他の方法と比較して非常に速い。拍動する犬の心臓に対して、20の垂直HARP画像および20の水平HARP画像の計算が約30秒で終了した。LVの心筋内への心内膜および心外膜の円の配置によって、人間に相互作用があるのは約20秒である。20の時間フレーム全てを介するこのプロセスにより定義された48の点のトラッキングは、わずか約5秒で終了し、ラグランジアンひずみの計算もまた、わずか約5秒で終了する。画像からひずみを計算する時間全体は、ボタンにクリックし、画像を調整する時間を含んでわずか約2秒である。さらに一定の工程の重要な効率化が可能になる。
【0140】
画像データの編集(organization)および帯域通過フィルタの設定(definition)もまた、HARP分析の処理時間全体を増加する。標準のスキャンでは、これらの時間は無視できる程であり、画像シーケンスは、自動的に構築され得、現行の帯域通過フィルタが使用され得る。特定のスキャンまたは実験手順では、いくつかの付加的な時間が、HARP処理のためにデータを準備する際に費やされ得る。当業者は、一般的にこれらの付加的な工程を30分未満で実行し得、便利なユーザインターフェースによりさらにこの時間が低減する。HARPは、さらにわずかな有効化および最適化を伴う臨床的使用に有用である。
【0141】
HARP画像を使用して、高密度の増分速度場(incremental velocity field)であるオプティカルフローを計算するための方法を以前に提案した(Osman et al .,「Imaging heart motion using harmonic phase MRI,」October 1998)。このHARPオプティカルフロー方法では、材料の性質としてHARP角度のアイデアおよび見かけ上の動きの観念を用いたが、2つのHARP値を共有して点を繰り返して求めはしなかった。代わりに、各画素で単純な2×2のマトリックスインバースを使用して次の画像フレームにおいて直接におよび急速に各画素の大体の位置を計算するための複数の制約光フローのアイデアを用いる。画像における全ての画素に適用され、次の時間フレームにのみトラッキングされる場合、HARPトラッキングは、より優れた精度のみについて本質的に同じ結果を与える。HARPオプティカルフロー方法はまた、さらに多くの時間おそらく4〜5倍の長い時間が必要となる。HARPオプティカルフロー方法は、HARPトラッキングを初期化すること、または視覚化動きのための非常に高速で高密度の動き場を生成することあるいは高密度のメッシュ上の他の動き量を計算することについて有用であり得る。
【0142】
本発明の方法では、HARP角度という材料の性質が、速く、正確で、ロバストな2次元のHARPトラッキング法を開発するために利用された。点は、左心室の円形方向および動径方向のラグランジアンひずみを直接に計算するために座標系においてトラッキングされた。拍動した犬の心臓についての実験は、異常な動きをトラッキングし、以前に報告された分析と一致するひずみを計算するHARPの能力を示した。誤ってトラッキングされた点の補正についての改良技術を発展させ、ドブタミンの応力を経験する正常な人間の心臓について示された。最後に、予備的な誤り分析が行われ、FindTags、標準テンプレートマッチング法と比較するとHARPトラッキング法は非常に利点を有することを示した。HARPトラッキングおよびラグランジアンひずみ分析が、計算的に高速で、さらに適切な有効化の後では臨床的な使用に用いられることが示された。
【0143】
開示の簡易性の目的のために、本発明の方法を医学的用途に使用することを特に参考にしてきたが、本発明の方法は、それに制限されず、広範な多様な産業的用途および他の用途において使用され得る。
【0144】
それゆえ、本発明の特定の実施形態は例示のために本明細書中で説明され、当業者には、本発明から逸脱することなく詳細部の多数の変更が為され得ることが明らかである。
【図面の簡単な説明】
【図1】 図1は、2次元の1−1SPAMMタグ付画像のシミュレーション図である。
【図2】 図2は、図1の画像のフーリエ変換の大きさを示す。
【図3】 図3は、複素画像の角度を示す。
【図4】 図4は、対象における点の計算された変位を示す。
【図5】 図5は、対象の点を実際の変位とともに示す。
【図6】 図6は、図3に示される角度画像から生成される計算された変位タグ線を示す。
【図7a】 図7aは、1−1SPAMMタグを有する左心室の断面図である。
【図7b】 図7bは、図7aの角度画像である。
【図8a】 図8aは、水平SPAMMタグを有する磁気共鳴画像を示す。
【図8b】 図8bは、図8aの画像のフーリエ変換の大きさを示す。
【図8c】 図8cは、図8bの円内のスペクトルピークを抽出することによって生成される、大きさを示す複素画像を示す。
【図8d】 図8dは、図8cの位相を示す。
【図9a】 図9aは、拡張末期のタグ面を模式的に示す。
【図9b】 図9bは、動きの結果生じるタグ面のゆがみを示す。
【図10】 図10は、左心室壁および八分円の図上に重ねられた同心円の模式図である。
【図11】 図11は、グリッドを提供するために垂直および水平のタグ画像を増やすことによって生成される電気刺激で鼓動させた犬の心臓のタグ付磁気共鳴画像のシーケンスを示す。画像は、左上に示される拡張末期から右下に示される収縮末期までの電気刺激で鼓動させた犬の心臓の動きを示す20個の時間フレームである。
【図12a】 図12aは、時間を追って追跡された時間フレーム1における手動で選択された点を示す。
【図12b】 図12bは、時間を追って追跡された時間フレーム5における手動で選択された点を示す。
【図12c】 図12cは、時間を追って追跡された時間フレーム10における手動で選択された点を示す。
【図12d】 図12dは、時間を追って追跡された時間フレーム20における手動で選択された点を示す。
【図13a】 図13aは、密集して拾われた点の位置を示す拡張末期の心臓を示す。
【図13b】 図13bは、時間フレーム1における追跡物質点の拡大を示す。
【図13c】 図13cは、時間フレーム5における追跡物質点の拡大を示す。
【図13d】 図13dは、時間フレーム10における追跡物質点の拡大を示す。
【図13e】 図13eは、時間フレーム20における追跡物質点の拡大を示す。
【図14a】 図14aは、収縮末期における手動で定義される円を示す。
【図14b】 図14bは、拡張末期へ逆のぼって追跡した後の図14aの円のゆがんだ形を示す。
【図14c】 図14cは、追跡された円の全シーケンスを示す。
【図15a】 図15aは、各八分円における心外膜の半径方向のひずみ(1点鎖線)および心内膜の半径方向のひずみ(実線)の時間的進展を示す。
【図15b】 図15bは、各八分円における心外膜の円周方向のひずみ(1点鎖線)、心中壁の円周方向のひずみ(破線)、および心内膜の円周方向のひずみ(実線)の時間的進展を示す。
【図16a】 図16aは、HARP改良なしの初めの左上の表示から最後の右下の表示まで、短軸画像および追跡された円を含むドブタミン誘因ストレスを受ける通常の人間の心臓を示す。
【図16b】 図16bは、図16aと類似しているが、HARP改良適用後の結果を示す。
【図16c】 図16cは、改良点を使用して計算された円周方向のひずみの時間的進展を示す。
【図17a】 図17aは、HARPπ輪郭(白いカーブ)が上書きされているFindTags(黒点)からのタグ点を有するタグ付画像を有する通常の人間のデータを使用してFindTagsと比較してのHARP精度を示す。
【図17b】 図17bは、FindTagsのタグ点とHARPイソ輪郭との間の平均距離を示す。
【図18】 図18は、FindTagsとHARPとの間のタグ交差推定における平均差のプロットを示す。
Claims (40)
- 磁気共鳴画像装置を操作して対象物の動きを測定するための方法であって、該方法は、
該対象物内の関心のある領域を空間的に変調してタグ付磁気共鳴画像のCINEシリーズのフーリエ領域内の明白なスペクトルピークのアレイを生成するパルスシーケンスを適用する工程と、
帯域通過フィルタを使用して、該フーリエ領域内の明白なスペクトルピークの該アレイから、第1の時間フレームに対応する第1のスペクトルピークを切りはなす工程と、
該切りはなされた第1のスペクトルピークの逆フーリエ変換情報を計算する工程と、
該第1のスペクトルピークから第1の高調波位相画像を計算する工程と、
帯域通過フィルタを使用して、該フーリエ領域内の明白なスペクトルピークの該アレイから、該第1の時間フレームに対応する第2のスペクトルピークを切りはなす工程と、
該切りはなされた第2のスペクトルピークの逆フーリエ変換情報を計算する工程と、
該第2のスペクトルピークから第2の高調波位相画像を計算する工程と、
帯域通過フィルタを使用して、該フーリエ領域内の明白なスペクトルピークの該アレイから、第2の時間フレームに対応する第3のスペクトルピークを切りはなす工程と、
該切りはなされた第3のスペクトルピークの逆フーリエ変換情報を計算する工程と、
該第3のスペクトルピークから第3の高調波位相画像を計算する工程と、
帯域通過フィルタを使用して、該フーリエ領域内の明白なスペクトルピークの該アレイから、該第2の時間フレームに対応する第4のスペクトルピークを切りはなす工程と、
該切りはなされた第4のスペクトルピークの逆フーリエ変換情報を計算する工程と、
該第4のスペクトルピークから第4の高調波位相画像を計算する工程と、
該第1、第2、第3および第4の高調波位相画像を使用して、画像面における複数の質点の見かけ上の動きをトラッキングする工程と
を包含する方法。 - 前記質点が心臓に対応する、請求項1に記載の方法。
- 円形ラグランジアンひずみを判定するために前記方法を用いる工程を包含する、請求項2に記載の方法。
- 動径方向ラグランジアンひずみを判定するために前記方法を用いる工程を包含する、請求項2に記載の方法。
- ラグランジアンひずみの2次元画像を提供するために前記方法を用いる工程を包含する、請求項1に記載の方法。
- 動いている人間の心臓に前記方法を用いる工程を包含する、請求項1に記載の方法。
- ラグランジアンひずみの3次元画像を提供するために前記方法を用いる工程を包含する、請求項1に記載の方法。
- 心内膜のひずみと、心外膜のひずみと、中間壁のひずみとのうちの少なくとも1つを判定する際に前記方法を用いる工程を包含する、請求項3に記載の方法。
- 心内膜の動径方向のひずみと心外膜の動径方向のひずみとのうちの少なくとも1つを判定する際に前記方法を用いる工程を包含する、請求項4に記載の方法。
- 心筋におけるひずみを判定するために前記方法を用いる工程を包含する、請求項2に記載の方法。
- 2つの異なる時間の点間の距離の増加を測定するために、前記方法を用いる工程を包含する、請求項1に記載の方法。
- 2つの異なる時間の点間の距離の減少を測定するために、前記方法を用いる工程を包含する、請求項1に記載の方法。
- 前記心臓の左心室内部の動きを測定するために前記方法を用いる工程を包含する、請求項6に記載の方法。
- 約拡張末期で前記動きの測定を開始する工程を包含する、請求項6に記載の方法。
- 水平方向と垂直方向の両方にタグ付画像を用いる工程を包含する、請求項1に記載の方法。
- 画像面の前記質点の見かけ上の動きをトラッキングすることによりひずみを判定する工程と、該トラッキングされた点からラグランジアンひずみを判定する工程とを包含する、請求項1に記載の方法。
- 前記動きをトラッキングする際に改良手順を用いる工程を包含し、該改良手段は、前記質点内の誤ってトラッキングされた点を補正するために、該質点内から一つ以上の正確にトラッキングされた点を使用することを含む、請求項1に記載の方法。
- 前記改良手順において、点のシーケンスであって、該点の各々は、次の隣接する点から1画素未満離れている、シーケンスを用いる工程を包含する、請求項17に記載の方法。
- 円形伸張の指標として正のひずみ値を用い、円形収縮の指標として負のひずみ値を用いる工程を包含する、請求項3に記載の方法。
- 動径方向の厚みの増加の指標として正のひずみ値を用い、動径方向の厚みの減少の指標として負のひずみ値を用いる工程を包含する、請求項4に記載の方法。
- 磁気共鳴画像装置を操作して対象物の動きを測定するためのシステムであって、該システムは、
該対象物内の関心のある領域を空間的に変調してタグ付磁気共鳴画像のCINEシリーズのフーリエ領域内の明白なスペクトルピークのアレイを生成するパルスシーケンスを適用する手段と、
該フーリエ領域内の明白なスペクトルピークの該アレイから、第1の時間フレームに対応する第1のスペクトルピークを切りはなす第1の帯域通過フィルタと、
該切りはなされた第1のスペクトルピークの逆フーリエ変換情報を計算する手段と、
該第1のスペクトルピークから第1の高調波位相画像を計算する手段と、
該フーリエ領域内の明白なスペクトルピークの該アレイから、該第1の時間フレームに対応する第2のスペクトルピークを切りはなす第2の帯域通過フィルタと、
該切りはなされた第2のスペクトルピークの逆フーリエ変換情報を計算する手段と、
該第2のスペクトルピークから第2の高調波位相画像を計算する手段と、
該フーリエ領域内の明白なスペクトルピークの該アレイから、第2の時間フレームに対応する第3のスペクトルピークを切りはなす第3の帯域通過フィルタと、
該切りはなされた第3のスペクトルピークの逆フーリエ変換情報を計算する手段と、
該第3のスペクトルピークから第3の高調波位相画像を計算する手段と、
該フーリエ領域内の明白なスペクトルピークの該アレイから、該第2の時間フレームに対応する第4のスペクトルピークを切りはなす第4の帯域通過フィルタと、
該切りはなされた第4のスペクトルピークの逆フーリエ変換情報を計算する手段と、
該第4のスペクトルピークから第4の高調波位相画像を計算する手段と、
該第1、第2、第3および第4の高調波位相画像を使用して、画像面における複数の質点の見かけ上の動きをトラッキングする手段と
を備える、システム。 - 前記質点が心臓に対応する、請求項21に記載のシステム。
- 円形ラグランジアンひずみを判定するのに適している、請求項22に記載のシステム。
- 動径方向ラグランジアンひずみを判定するのに適している、請求項22に記載のシステム。
- ラグランジアンひずみの2次元画像を提供するのに適している、請求項21に記載のシステム。
- 動いている人間の心臓の動きを測定するのに適している、請求項21に記載のシステム。
- ラグランジアンひずみの3次元画像を提供するのに適している、請求項21に記載のシステム。
- 心内膜のひずみと、心外膜のひずみと、中間壁のひずみとのうちの少なくとも1つを判定するのに適している、請求項23に記載のシステム。
- 心内膜の動径方向のひずみと心外膜の動径方向のひずみとのうちの少なくとも1つを判定するのに適している、請求項24に記載のシステム。
- 心筋におけるひずみを判定するのに適している、請求項22に記載のシステム。
- 2つの異なる時間の点間の距離の増加を測定するのに適している、請求項21に記載のシステム。
- 2つの異なる時間の点間の距離の減少を測定するのに適している、請求項21に記載のシステム。
- 前記心臓の左心室内部の動きを測定するのに適している、請求項26に記載のシステム。
- 前記動きの測定が、概して拡張末期で開始される、請求項26に記載のシステム。
- 水平方向と垂直方向の両方のタグ付画像に適している、請求項21に記載のシステム。
- 画像面の前記質点の見かけ上の動きをトラッキングすることによりひずみを判定する手段と、該トラッキングされた点からラグランジアンひずみを判定する手段とを備える、請求項21に記載のシステム。
- 前記動きをトラッキングする際に改良手順を備えており、該改良手段は、前記質点内の誤ってトラッキングされた点を補正するために、該質点内から一つ以上の正確にトラッキングされた点を使用することを含む、請求項21に記載のシステム。
- 前記改良手順は、点のシーケンスであって、該点の各々は、次の隣接する点から1画素未満離れている、シーケンスを使用することを含む、請求項37に記載のシステム。
- 正のひずみ値が円形伸張の指標であり、負のひずみ値が円形収縮の指標である、請求項23に記載のシステム。
- 正のひずみ値が動径方向の厚みであり、負のひずみ値が動径方向の厚みの減少の指標である、請求項24に記載のシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13059599P | 1999-04-22 | 1999-04-22 | |
| US60/130,595 | 1999-04-22 | ||
| PCT/US2000/010232 WO2000064344A1 (en) | 1999-04-22 | 2000-04-14 | Cardiac motion tracking using cine harmonic phase (harp) magnetic resonance imaging |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2002541963A JP2002541963A (ja) | 2002-12-10 |
| JP2002541963A5 JP2002541963A5 (ja) | 2007-05-31 |
| JP4679729B2 true JP4679729B2 (ja) | 2011-04-27 |
Family
ID=22445423
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000613339A Expired - Lifetime JP4679729B2 (ja) | 1999-04-22 | 2000-04-14 | Cine高調波位相(harp)磁気共鳴画像法を用いた心臓動きのトラッキング |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US6892089B1 (ja) |
| EP (1) | EP1171031B1 (ja) |
| JP (1) | JP4679729B2 (ja) |
| AT (1) | ATE545873T1 (ja) |
| AU (1) | AU780349B2 (ja) |
| CA (1) | CA2368237A1 (ja) |
| MX (1) | MXPA01010656A (ja) |
| WO (1) | WO2000064344A1 (ja) |
Families Citing this family (61)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6597935B2 (en) | 2000-02-10 | 2003-07-22 | The Johns Hopkins University | Method for harmonic phase magnetic resonance imaging |
| AU2002309989A1 (en) | 2001-05-18 | 2002-12-03 | Rigel Pharmaceuticals, Incorporated | Directed evolution of protein in mammalian cells |
| US6961454B2 (en) * | 2001-10-04 | 2005-11-01 | Siemens Corporation Research, Inc. | System and method for segmenting the left ventricle in a cardiac MR image |
| DE10160205A1 (de) * | 2001-12-07 | 2003-06-18 | Philips Intellectual Property | Verfahren zur Rekonstruktion eines 3D-Bilddatensatzes eines Untersuchungsbereiches |
| JP4176989B2 (ja) | 2001-12-12 | 2008-11-05 | 株式会社東芝 | 磁気共鳴診断装置 |
| JP4060615B2 (ja) * | 2002-03-05 | 2008-03-12 | 株式会社東芝 | 画像処理装置及び超音波診断装置 |
| US7835783B1 (en) * | 2002-04-22 | 2010-11-16 | The United States Of America As Represented By The Department Of Health And Human Services | Magnetic resonance imaging methods and apparatus for time-series motion tracking with inversion recovery compensation |
| ATE530115T1 (de) * | 2002-07-29 | 2011-11-15 | Univ Wake Forest | Herzdiagnostikum mit wandbewegungs- und perfusions-herz-mrt-darstellung und systeme für die herzdiagnostik |
| US7081749B2 (en) * | 2004-08-02 | 2006-07-25 | Albert Macovski | Magnetic resonance imaging using demodulated k-space segments |
| SE526438C2 (sv) * | 2003-04-01 | 2005-09-13 | Sectra Imtec Ab | Metod och system för mätning i en dynamisk sekvens av medicinska bilder |
| US8064979B2 (en) * | 2003-06-09 | 2011-11-22 | General Electric Company | Tempero-spatial physiological signal detection method and apparatus |
| US7495438B2 (en) * | 2005-05-04 | 2009-02-24 | John Hopkins University | Three dimensional magnetic resonance motion estimation on a single image plane |
| US7352370B2 (en) * | 2005-06-02 | 2008-04-01 | Accuray Incorporated | Four-dimensional volume of interest |
| DE102005051323B4 (de) * | 2005-10-26 | 2008-01-31 | Siemens Ag | Verfahren und Gerät zur Magnet-Resonanz-Bildgebung auf Basis einer Gradientenechosequenz |
| US7911207B2 (en) | 2005-11-16 | 2011-03-22 | Board Of Regents, The University Of Texas System | Method for determining location and movement of a moving object |
| US7498811B2 (en) * | 2005-11-16 | 2009-03-03 | Macfarlane Duncan L | Apparatus and method for patient movement tracking |
| US7977942B2 (en) * | 2005-11-16 | 2011-07-12 | Board Of Regents, The University Of Texas System | Apparatus and method for tracking movement of a target |
| EP1982305B1 (en) * | 2006-01-31 | 2011-06-15 | Canadian Space Agency | Method and system for increasing signal-to-noise ratio |
| CN100570393C (zh) * | 2006-02-06 | 2009-12-16 | 株式会社东芝 | 磁共振成像装置及磁共振成像方法 |
| JP5105848B2 (ja) * | 2006-02-06 | 2012-12-26 | 株式会社東芝 | 磁気共鳴イメージング装置および磁気共鳴イメージング装置における撮影条件設定方法 |
| WO2007099525A2 (en) * | 2006-03-03 | 2007-09-07 | Medic Vision - Brain Technologies Ltd. | System and method of automatic prioritization and analysis of medical images |
| US8081806B2 (en) * | 2006-05-05 | 2011-12-20 | General Electric Company | User interface and method for displaying information in an ultrasound system |
| US7813537B2 (en) * | 2006-05-15 | 2010-10-12 | Siemens Medical Solutions Usa, Inc. | Motion-guided segmentation for cine DENSE images |
| EP2023812B1 (en) | 2006-05-19 | 2016-01-27 | The Queen's Medical Center | Motion tracking system for real time adaptive imaging and spectroscopy |
| US8073523B2 (en) * | 2006-06-06 | 2011-12-06 | California Institute Of Technology | Method for obtaining strain from radially-tagged magnetic resonance imaging (MRI) |
| US8290266B2 (en) * | 2006-08-24 | 2012-10-16 | Agency For Science, Technology And Research | Model-based method and system for image segmentation and modelling |
| US20100099994A1 (en) * | 2007-02-28 | 2010-04-22 | Holmstroem Nils | Implantable heart analyzing device, system and method |
| US8384382B2 (en) * | 2007-10-18 | 2013-02-26 | Hitachi Medical Corporation | Magnetic resonance imaging apparatus |
| TW200930850A (en) * | 2008-01-03 | 2009-07-16 | Green Energy Technology Inc | Cooling structure for body of crystal growth furnace |
| US8475823B2 (en) * | 2008-04-18 | 2013-07-02 | Medtronic, Inc. | Baclofen formulation in a polyorthoester carrier |
| US8390291B2 (en) * | 2008-05-19 | 2013-03-05 | The Board Of Regents, The University Of Texas System | Apparatus and method for tracking movement of a target |
| JP5398230B2 (ja) * | 2008-10-30 | 2014-01-29 | 株式会社東芝 | 画像処理装置、磁気共鳴イメージング装置および画像管理システム |
| US8848989B2 (en) * | 2009-01-23 | 2014-09-30 | Koninklijke Philips N.V. | Cardiac image processing and analysis |
| JP5629272B2 (ja) * | 2009-01-29 | 2014-11-19 | コーニンクレッカ フィリップス エヌ ヴェ | 生物学的構造における時変パラメータの視覚化 |
| JP5491836B2 (ja) * | 2009-01-30 | 2014-05-14 | 株式会社東芝 | 超音波診断装置、超音波画像処理装置、医用画像診断装置及び医用画像処理装置 |
| JP5330006B2 (ja) * | 2009-02-05 | 2013-10-30 | 株式会社東芝 | 磁気共鳴イメージング装置 |
| WO2010125832A1 (ja) * | 2009-04-30 | 2010-11-04 | 国立大学法人京都大学 | タギングmr画像における撮像対象の運動解析方法及びmri装置 |
| DE102009021492B4 (de) * | 2009-05-15 | 2012-01-12 | Siemens Aktiengesellschaft | Verfahren zur Bestimmung einer MR-Relaxationszeit im Herzmuskel bei einer Magnetresonanzuntersuchung, Magnetresonanzanlage, Computerprogrammprodukt und elektronisch lesbarer Datenträger |
| US8478012B2 (en) * | 2009-09-14 | 2013-07-02 | General Electric Company | Methods, apparatus and articles of manufacture to process cardiac images to detect heart motion abnormalities |
| WO2012006578A2 (en) | 2010-07-08 | 2012-01-12 | The Regents Of The University Of California | End-to-end visual recognition system and methods |
| EP2670302A4 (en) | 2011-02-03 | 2015-04-15 | Univ California | CURVILIGNE MARKING IN CARDIAC MRI |
| US20130035588A1 (en) * | 2011-08-03 | 2013-02-07 | Siemens Corporation | Magnetic resonance imaging for therapy planning |
| EP2747641A4 (en) | 2011-08-26 | 2015-04-01 | Kineticor Inc | METHOD, SYSTEMS AND DEVICES FOR SCAN INTERNAL MOTION CORRECTION |
| WO2013040546A1 (en) * | 2011-09-16 | 2013-03-21 | University Of Pittsburgh - Of The Commonwealth | Noncontact electrophysiological measurement and imaging of the heart |
| ES2898624T3 (es) | 2012-08-29 | 2022-03-08 | Hempel As | Composiciones de revestimiento de imprimación anticorrosiva de zinc que comprenden esferas de vidrio huecas y un pigmento conductor |
| US9717461B2 (en) | 2013-01-24 | 2017-08-01 | Kineticor, Inc. | Systems, devices, and methods for tracking and compensating for patient motion during a medical imaging scan |
| US10327708B2 (en) | 2013-01-24 | 2019-06-25 | Kineticor, Inc. | Systems, devices, and methods for tracking and compensating for patient motion during a medical imaging scan |
| US9305365B2 (en) | 2013-01-24 | 2016-04-05 | Kineticor, Inc. | Systems, devices, and methods for tracking moving targets |
| EP2950714A4 (en) | 2013-02-01 | 2017-08-16 | Kineticor, Inc. | Motion tracking system for real time adaptive motion compensation in biomedical imaging |
| EP3157422A4 (en) | 2014-03-24 | 2018-01-24 | The University of Hawaii | Systems, methods, and devices for removing prospective motion correction from medical imaging scans |
| DE102014209803B4 (de) * | 2014-05-22 | 2016-03-03 | Siemens Aktiengesellschaft | 4D-Geschwindigkeitsprofil-Bildaufnahme mit einer Magnetresonanzanlage |
| US9734589B2 (en) | 2014-07-23 | 2017-08-15 | Kineticor, Inc. | Systems, devices, and methods for tracking and compensating for patient motion during a medical imaging scan |
| CN105426927B (zh) * | 2014-08-26 | 2019-05-10 | 东芝医疗系统株式会社 | 医学图像处理装置、医学图像处理方法和医学图像设备 |
| CN105701846B (zh) * | 2014-11-27 | 2019-01-15 | 东芝医疗系统株式会社 | 医学图像处理装置和方法以及医学成像设备 |
| US9943247B2 (en) | 2015-07-28 | 2018-04-17 | The University Of Hawai'i | Systems, devices, and methods for detecting false movements for motion correction during a medical imaging scan |
| WO2017091479A1 (en) | 2015-11-23 | 2017-06-01 | Kineticor, Inc. | Systems, devices, and methods for tracking and compensating for patient motion during a medical imaging scan |
| JP7163278B2 (ja) | 2016-04-27 | 2022-10-31 | マイオカーディアル ソリューションズ インク. | Mriのストレイン測定値による心機能の迅速な定量評価 |
| US10109050B2 (en) * | 2016-06-01 | 2018-10-23 | Siemens Healthcare Gmbh | Spatiotemporal background phase correction for phase contrast velocity encoded MRI |
| KR101784502B1 (ko) | 2016-09-05 | 2017-11-06 | 성균관대학교산학협력단 | 동적 태그 자기 공명 영상 장치 및 방법 |
| US10855714B2 (en) * | 2016-10-31 | 2020-12-01 | KnowBe4, Inc. | Systems and methods for an artificial intelligence driven agent |
| US11872019B2 (en) | 2019-06-05 | 2024-01-16 | Myocardial Solutions, Inc. | MRI-derived strain-based measurements and related image data acquisitions, image data processing, patient evaluations and monitoring methods and systems |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1099297A (ja) * | 1996-09-18 | 1998-04-21 | Siemens Corporate Res Inc | タグ付けされたmrイメージにおける心臓壁の動きを再生するためのハイブリッドモデルおよび方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4486708A (en) | 1981-12-21 | 1984-12-04 | Albert Macovski | Selective material projection imaging system using nuclear magnetic resonance |
| US5363044A (en) * | 1993-02-09 | 1994-11-08 | Sunnybrook Health Science Center | Motion ghost manipulation in magnetic resonance imaging |
| US5910728A (en) | 1996-11-12 | 1999-06-08 | Beth Israel Deaconess Medical Center | Simultaneous acquisition of spatial harmonics (SMASH): ultra-fast imaging with radiofrequency coil arrays |
| WO1998059255A1 (en) * | 1997-06-24 | 1998-12-30 | California Institute Of Technology | A method for suppressing noise in measurements |
| US6453187B1 (en) * | 1998-08-10 | 2002-09-17 | The Johns Hopkins University | Method of employing angle images for measuring object motion in tagged magnetic resonance imaging |
-
2000
- 2000-04-14 WO PCT/US2000/010232 patent/WO2000064344A1/en active Application Filing
- 2000-04-14 AU AU42474/00A patent/AU780349B2/en not_active Expired
- 2000-04-14 AT AT00922265T patent/ATE545873T1/de active
- 2000-04-14 JP JP2000613339A patent/JP4679729B2/ja not_active Expired - Lifetime
- 2000-04-14 CA CA002368237A patent/CA2368237A1/en not_active Abandoned
- 2000-04-14 US US09/959,311 patent/US6892089B1/en not_active Expired - Lifetime
- 2000-04-14 MX MXPA01010656A patent/MXPA01010656A/es active IP Right Grant
- 2000-04-14 EP EP00922265A patent/EP1171031B1/en not_active Expired - Lifetime
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1099297A (ja) * | 1996-09-18 | 1998-04-21 | Siemens Corporate Res Inc | タグ付けされたmrイメージにおける心臓壁の動きを再生するためのハイブリッドモデルおよび方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| AU780349B2 (en) | 2005-03-17 |
| AU4247400A (en) | 2000-11-10 |
| CA2368237A1 (en) | 2000-11-02 |
| EP1171031A1 (en) | 2002-01-16 |
| MXPA01010656A (es) | 2002-06-04 |
| EP1171031B1 (en) | 2012-02-15 |
| ATE545873T1 (de) | 2012-03-15 |
| EP1171031A4 (en) | 2006-05-10 |
| US6892089B1 (en) | 2005-05-10 |
| JP2002541963A (ja) | 2002-12-10 |
| WO2000064344A1 (en) | 2000-11-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4679729B2 (ja) | Cine高調波位相(harp)磁気共鳴画像法を用いた心臓動きのトラッキング | |
| Osman et al. | Cardiac motion tracking using CINE harmonic phase (HARP) magnetic resonance imaging | |
| Osman et al. | Visualizing myocardial function using HARP MRI | |
| Osman et al. | Imaging heart motion using harmonic phase MRI | |
| Ibrahim | Myocardial tagging by cardiovascular magnetic resonance: evolution of techniques–pulse sequences, analysis algorithms, and applications | |
| US7813537B2 (en) | Motion-guided segmentation for cine DENSE images | |
| Xu et al. | Deformation analysis of 3D tagged cardiac images using an optical flow method | |
| US6597935B2 (en) | Method for harmonic phase magnetic resonance imaging | |
| JP4527881B2 (ja) | 磁気共鳴イメージング方法 | |
| US7495438B2 (en) | Three dimensional magnetic resonance motion estimation on a single image plane | |
| JPH11321A (ja) | 速度符号化核磁気共鳴画像から変形を示す画像を発生する方法 | |
| US10776998B1 (en) | Method and system for analysis of 3D deformations and regional function of a heart with 3D SinMod | |
| JP2003515404A (ja) | 素材の変形及びひずみを検査するための高速3次元磁気共鳴タッギング | |
| Dowsey et al. | Motion-compensated MR valve imaging with COMB tag tracking and super-resolution enhancement | |
| Pan et al. | Fast tracking of cardiac motion using 3D-HARP | |
| Wang et al. | Orthogonal CSPAMM (OCSPAMM) MR tagging for imaging ventricular wall motion | |
| Osman | Measuring regional cardiac function using harmonic phase magnetic resonance imaging | |
| Augenstein et al. | Magnetic resonance imaging and ventricle mechanics | |
| JP2932175B2 (ja) | Mri装置 | |
| Ibrahim | Harmonic Phase (HARP) Analysis | |
| Kolbitsch | Advanced Techniques for Cardiovascular Magnetic Resonance Imaging in Cases of Irregular Motion | |
| Yosry et al. | Improved cardiac wall motion tracking based on harmonic phase technique | |
| Axel et al. | MRI Tagging of the Heart | |
| Yosry et al. | Improved cardiac wall motion tracking based on harmonic phase |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070330 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070330 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100126 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20100420 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20100427 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20100526 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20100602 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100628 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110106 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110202 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4679729 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140210 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |