JP4636706B2 - カメラ - Google Patents
カメラ Download PDFInfo
- Publication number
- JP4636706B2 JP4636706B2 JP2001047460A JP2001047460A JP4636706B2 JP 4636706 B2 JP4636706 B2 JP 4636706B2 JP 2001047460 A JP2001047460 A JP 2001047460A JP 2001047460 A JP2001047460 A JP 2001047460A JP 4636706 B2 JP4636706 B2 JP 4636706B2
- Authority
- JP
- Japan
- Prior art keywords
- focus detection
- light receiving
- image
- focus
- optical member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Landscapes
- Focusing (AREA)
- Automatic Focus Adjustment (AREA)
Description
【発明の属する技術分野】
本発明は、複数の光電変換素子から成る受光手段を有するカメラの改良に関するものである。
【0002】
【従来の技術】
従来より、撮影レンズを通過した光束をファインダ光学系に導く半透過部を有する主ミラーと、該主ミラーの半透過部を通過した光束を焦点検出装置に導くサブミラーとを備え、焦点検出時及びファインダ観察時には、主ミラー及びサブミラーを撮影光路内の定位置まで侵入させてこの位置で静止させ、撮影時には、主ミラー及びサブミラーを撮影光路外へ退避させるよう移動可能に構成されたカメラが提案されている。
【0003】
この種のカメラにおいては、主ミラー及びサブミラーの作動回数が増加すると、該主ミラー及びサブミラーの駆動に関わる部材が摩耗し、それに伴い焦点検出時の主ミラー及びサブミラーの静止位置が変化し、焦点検出装置に導かれる光束の光路長変化により、焦点検出装置で検出される合焦位置と結像面の合焦位置がずれてしまうという問題があった。
【0004】
そこで、特開平9−54243号では、あらかじめ光学部材の作動積算回数と焦点検出信号補正量の関係を記憶しておき、焦点検出時に、そのときの作動積算回数とあらかじめ記憶された作動積算回数と焦点検出信号補正量の関係に基づいて焦点検出信号を補正するカメラが提案されている。
【0005】
図14は、前記特開平9−54243号に開示されるカメラの要部を示す構成図である。
【0006】
同図において、101は撮影レンズ、101aは撮影レンズの光軸、102は撮影レンズ101を通過した被写体像を結像させる画像記録媒体である。103は撮影時には撮影光路外へ移動可能に設けられた半透過部を有する主ミラーであり、撮影レンズ101を通過した光束の一部を、ピント板104、ペンタプリズム105、接眼レンズ106から成るファインダ光学系へ導いている。一方、主ミラー103の半透過部を通過した残りの光束は、主ミラー103の動作に同期して移動可能なように構成されるサブミラー107によって下方へ反射され、一対の光電変換素子列から成るイメージセンサ、一対の2次結像レンズ、一対の開口部を有する絞り、フィールドレンズなどから構成される周知の位相差方式の焦点検出装置108に導かれる。
【0007】
ここで、位相差方式の焦点検出原理について、図15を用いて説明する。なお、図14と同一の記号を付した部分は、同一の機能を有するものである。また、この図19においては、図の煩雑さをなくすため、主ミラー103及びサブミラー107を省略し、フィールドレンズ115、一対の開口部を有する絞り116、一対の2次結像レンズ117、一対の光電変換素子列などから成るイメージセンサ118を、撮影レンズの光軸101a上に展開している。
【0008】
光軸101a上の一点を発した光束は、撮影レンズ101を通過後、画像記録媒体102と光学的に共役な位置関係にある1次結像面に結像し、フィールドレンズ115、絞り116、2次結像レンズ117を介して、イメージセンサ118上に一定の間隔を隔てて結像している。前記フィールドレンズ115は、撮影レンズ101の瞳101bと一対の2次結像レンズ117の入射瞳、即ち絞り116付近が結像するように配置されており、絞り116の一対の開口部に対応して撮影レンズ101の瞳101bを図中上下方向に分割している。
【0009】
このような構成で、例えば、撮影レンズ101を図中左方に繰り出して、画像記録媒体102より左方に光束が結像すると、イメージセンサ118上の一対の像は、図中矢印方向に変位する。この被写体像の相対位置変位量は撮影レンズの焦点外れ量と特定の関数関係にあるため、各センサ列対でそのセンサ出力に対してそれぞれ適当な演算を施せば、撮影レンズの焦点外れ量、いわゆるデフォーカス量を検出する事ができる。よって、この一対の像の相対的なずれ量をイメージセンサ118で検出することで、撮影レンズ101の焦点調節を行うことが可能である。尚、撮影レンズ101を図中右方に繰り込んだ場合も同様である。また、撮影レンズ101の光軸101a以外の物点についても同様である。
【0010】
以上のような原理の焦点検出装置108を用いて、撮影レンズ101の焦点検出を行う。
【0011】
図14に戻り、109はカメラの各種の動作を処理、制御するマイクロコンピュータであり、内部にCPU109a、焦点検出処理動作などに関わるプログラムが格納されたROM109b,RAM109c,EEPROM109d(電気的消去可能プログラマブルROM)を具備している。110はイメージセンサ118に接続された焦点検出回路、111は前記主ミラー103を撮影光路外へ移動する為のミラー駆動手段、112はミラー駆動手段111を駆動する為のミラー駆動回路、113は撮影レンズ101の焦点調節を行う為のレンズ駆動手段、114はレンズ駆動手段113を駆動する為のレンズ駆動回路である。
【0012】
マイクロコンピュータ109に内蔵されたEEPROM109dには、予め実験的なデータにより主ミラー103の積算作動回数と焦点検出信号補正量の関係が記憶されており、RAM109bに記憶されている現在までの主ミラー103の積算作動回数と該EEPROM109dに記憶された積算作動回数と焦点検出信号補正量の関係を基に、ROM109cに格納される焦点検出処理動作に従って、焦点検出装置108、焦点検出回路110により得られる焦点検出信号を補正する。従って、主ミラー103及びサブミラー107の作動積算回数が増加した場合には、主ミラー103及びサブミラー107を移動可能に保持する部材が摩耗し、それに伴い焦点検出時の主ミラー及びサブミラーの静止位置が変化し、焦点検出光学系の光路長変化により、焦点検出装置108、焦点検出回路110で検出される合焦位置と画像記録媒体102上の合焦位置がずれてしまうが、そのときの主ミラー103の積算作動回数による焦点検出信号の補正を行うので、高精度の焦点検出を実現することができる。
【0013】
【発明が解決しようとする課題】
しかしながら、例えば、短期集中的に主ミラー103を作動させた場合と、適度な間隔を経て主ミラーを作動させた場合とでは、積算作動回数が同じでも、主ミラー103及びサブミラー107を保持する部材の摩耗具合や疲労度は異なり、それに伴う焦点検出信号のずれも異なる。
【0014】
上記従来例においては、主ミラー103及びサブミラー107の積算作動回数によって一律に焦点検出信号を補正してしまうため、適切な焦点検出信号補正が期待できないものであった。
【0015】
また、個々の部品の製造誤差や組立誤差によっても、摩耗具合や疲労度は異なり、適切な焦点検出信号の補正が行えないものであった。
【0016】
(発明の目的)
本発明の目的は、焦点検出光路内に具備される光学部材の作動回数の増加により焦点検出時における該光学部材に位置変化が生じ、焦点検出光学系の光路長が変化しても、焦点検出手段により得られる合焦位置と結像面での合焦位置のずれを適正に補正し、高精度な焦点検出を行うことのできるカメラを提供しようとするものである。
【0017】
【課題を解決するための手段】
上記目的を達成するために、本発明は、複数の光電変換素子から成る受光手段と、焦点検出の際に光路内にあって、撮影レンズを通過した光束を前記受光手段上に導く光学部材と、前記受光手段からの出力に基づいて前記撮影レンズの焦点状態を検出し、前記撮影レンズを制御する焦点検出手段とを有し、前記光学部材は一部が低反射率となるように構成されており、該低反射率の部位によりパターンが形成され、前記焦点検出手段による前記撮影レンズの制御は、前記光学部材に設けられたパターンの像の受光結果を用いることにより、焦点検出信号のずれを補正することを特徴とするカメラとするものである。また、別の側面の本発明は、複数の光電変換素子から成る受光手段と、焦点検出の際に光路内にあって、撮影レンズを通過した光束を前記受光手段上に導く光学部材と、前記受光手段からの出力に基づいて前記撮影レンズの焦点状態を検出し、前記撮影レンズを制御する焦点検出手段とを有し、前記光学部材にはパターンが形成され、前記焦点検出手段による前記撮影レンズの制御は、前記パターンの像の検出回数が所定回数に至る毎に、前記光学部材に設けられたパターンの像の受光結果を用いることにより、焦点検出信号のずれを補正することを特徴とするカメラとするものである。
【0020】
【発明の実施の形態】
以下、本発明を図示の実施の形態に基づいて詳細に説明する。
【0021】
(実施の第1の形態)
図1は本発明の実施の各形態に係るカメラの要部を示す構成図であり、上記図14と同じ機能を有する部分は同一符号を付し、その説明の詳細は省略する。
【0022】
図1において、撮影レンズ101を通過した光束の一部は、半透過部を有する主ミラー103により図中上方に反射され、ピント板104、ペンタプリズム105、接眼レンズ106から成るファインダ光学系へ導かれる。一方、主ミラー103の半透過部を通過した残りの光束は、サブミラー107によって図中下方へ反射され、周知の位相差方式を採用した焦点検出装置108に導かれる。
【0023】
上記サブミラー107により図中下方に反射された光束は、撮影レンズ101の結像面、即ち画像記録媒体102と光学的共役な位置関係にある1次結像面102aで一度結像し、視野マスク1、撮影レンズ101の瞳101bと2次結像レンズの入射瞳を結像させるフィールドレンズ115を通過後、全反射ミラー2により図中左方に光路を変換する。その後、赤外線カットガラス3、一対の開口部を有する絞り116、一対の射出面を有する2次結像レンズ117を介し、対の光電変換素子列から成るイメージセンサ118上に一対の被写体像を形成している。
【0024】
ここで、主ミラー103は主ミラー回転軸103aを中心に回転可動に設けられており、焦点検出時には、図1に示す位置に静止し、撮影時には、撮影光路外へ退避する周知のクイックリターン機構により構成されている。サブミラー107についても同様である。また、2次結像レンズ117の入射面は、光束が無理に屈折されることがないように凹面形状とし、イメージセンサ118上の広範囲で歪みのない良好な像を得ることができる。
【0025】
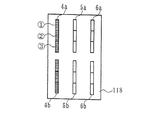
イメージセンサ118は、図2に示すように、複数の光電変換素子から形成される対の光電変換素子列で構成され、2次結像レンズ117の一対の射出面に対応した一対の光電変換素子列4a,4b及び5a,5b及び6a,6bを形成している。この一対の光電変換素子列4a,4b及び5a,5b及び6a,6bで一対の被写体像に関する光量分布を検出することにより、周知の位相差方式の焦点検出により撮影レンズ101の焦点調節状態を検出している。
【0026】
なお、図中、光電変換素子列4a,4bのみ1画素毎に光電変換素子を示したが、その他の光電変換素子列5a,5b,6a,6bについても同様に構成される。また、一対の光電変換素子列4a,4bは、図中示されるように、領域▲1▼,▲2▼,▲3▼に分割されているが、その他の光電変換素子列5a,5b,6a,6bについても同様に分割されている。
【0027】
図3は、イメージセンサ118上の一対の光電変換素子列4a,4b及び5a,5b及び6a,6bを画像記録媒体102上に逆投影し、撮影レンズ101側から見た図であり、画像記録媒体102上では、一対の光電変換素子列4a,4b及び5a,5b及び6a,6bはそれぞれほぼ一致して重なり、図中、4,5,6として示している。また、図3において、7a,7b,7c,7dは、ファインダ内に表示する焦点検出枠(不図示)を画像記録媒体102上に逆投影したものである。
【0028】
ここで、一対の光電変換素子列4a,4b,5a,5b,6a,6bは、前述したようにそれぞれ領域▲1▼,▲2▼,▲3▼に分割されており、したがって、逆投影された光電変換素子列4,5,6も、光電変換素子列4a,4b,5a,5b,6a,6bの分割された領域▲1▼,▲2▼,▲3▼に対応して3つに分割されており、分割されたそれぞれの領域が1つの焦点検出領域を形成している。この焦点検出領域に対応して、焦点検出枠は設けられており、したがって、焦点検出枠を画像記録媒体102上に逆投影すると、図3に示すように、焦点検出領域に対応した位置に7a,7b,7c,7dは位置する。
【0029】
以上のような構成で、画像記録媒体102上の7a,7b,7c,7dに対応したファインダ内の焦点検出枠に目標とする被写体を合わせることで、撮影レンズの焦点調節状態を検出することができる。なお、焦点検出領域4,5,6の分割された焦点検出領域の中で、図3において点線で示される焦点検出領域に対応した光電変換素子列4a,4b,6a,6b中の領域▲1▼及び▲3▼は、本実施の形態において焦点検出に用いられていない。
【0030】
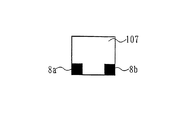
図4は、図1に示したサブミラー107を撮影レンズ101側から見た反射面正面図である。
【0031】
サブミラー107の反射面側には、図中に示されるようにパターン8a,8bが印刷などの手段により設けられており、反射率が限りなく低くなるように黒色の低反射性塗料などで構成されている。したがって、イメージセンサ118上に形成される被写体像は、サブミラー107上のパターン8a,8bを除いた領域で反射された光束である。また、パターン8a,8bはイメージセンサ118の一対の光電変換素子列4a,4b及び6a,6bの領域▲3▼でそれぞれ検出可能なように、領域▲3▼に対応したサブミラー107上の位置に設けられている。
【0032】
以上のような構成とすることにより、撮影に伴い移動可能に設けられたサブミラー107の焦点検出時の静止位置が積算作動回数の増加などの理由で変化しても、サブミラー107上に設けられたパターン8a,8bのイメージセンサ118による検出結果を用いることにより、焦点検出信号のずれを補正することが可能となり、高精度の焦点検出が可能である。
【0033】
以下に、イメージセンサ118によるパターン8a,8bの検出時について説明する。
【0034】
図5は、サブミラー107の静止位置が変化していない初期状態において、図2のイメージセンサ118上にサブミラー107上のパターン8a,8bを投影した図である。
【0035】
一対の光電変換素子列4a,4b及び6a,6bの領域▲3▼上に、パターン8a,8bに対応した図中斜線領域で示される一対のパターン像9a,9b及び9c,9dが所定の間隔を隔てて形成される。実際、サブミラー107上のパターン8a,8bは反射率が極めて低いため、イメージセンサ118上においては、像は形成されないが、パターン8a,8bに対応したイメージセンサ118上の領域を解りやすくするため、斜線領域として示している。また、実際イメージセンサ118上に形成される像は一対の光電変換素子列4a,4b及び5a,5b及び6a,6bの受光部領域のみで、それ以外の領域には光束が導かれないように図1の視野マスク1で制限されている。
【0036】
図6は、図5に示される光電変換素子列4a,4bのパターン像9a,9b付近を拡大した要部拡大図であり、図5と同様に、撮影レンズ101の焦点は画像記録媒体102上に結像している。
【0037】
図中、10a,10bはパターン像に関する光量分布を基に光電変換素子列4a,4bから出力される像信号を、Z0 は像信号10a,10bより公知の像間隔検出処理を経て得られる像間隔を、それぞれ示している。サブミラー107上のパターン8aは1次結像面102から離れているため、実際イメージセンサ118上に形成される一対のパターン像9a,9bはボケ像になる。したがって、例えば光電変換素子列4a,4bの領域▲3▼において、均一で適切な輝度の被写体を検出すると、出力される像信号は10a,10bで示されるように立ち下がりが少しゆるやかな曲線を描く。
【0038】
また、イメージセンサ118上のパターン像9a,9bが形成される位置も光学的に共役な位置から多少ずれてしまう。しかしながら、光電変換素子列4a,4bの領域▲3▼にほぼ均一で適切な輝度の被写体を検出させた場合、イメージセンサ118より出力される像信号は図6の10a,10bに示されるように、平らな高輝度部分(ピーク部)と平らな低輝度部分(ボトム部)が顕著に表れるため、パターン像9a,9bの像間隔をZ0 とすると、公知の像間隔検出処理を用いて像間隔Z0 を検出することが可能である。この像間隔Z0 がサブミラー107の静止位置が変化していない初期状態における像間隔となる。なお、パターン像9a,9bに関する像信号10a,10bに演算フィルタ処理を催してノイズ成分を除去すれば、多少不均一な被写体であっても像間隔Z0 を精度良く検出することが可能である。
【0039】
また、サブミラー107上のパターン8aは、撮影レンズと1次結像面102aの間に位置するので、撮影レンズ101の焦点調節状態(デフォーカス)による影響を受けず、像間隔Z0 は、どのような焦点調節状態であっても、常に一定である。即ち、像間隔Z0 は、被写体と光学部材の位置変化に依存している。
【0040】
次に、サブミラー107の作動回数増加により静止位置が変化した場合について説明する。
【0041】
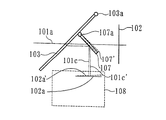
図7は、図1におけるサブミラー107を中心とした部分を拡大した要部拡大図であり、図1等と同一の符号を付した部分は同一の機能を有する部分であり、その詳細は省略する。
【0042】
カメラの撮影動作に伴い作動する主ミラー103及びサブミラー107の積算作動回数が増加すると、これらの作動機構を構成する部材の摩耗、疲労により主ミラー103及びサブミラー107の静止位置は変化する。
【0043】
そこで、例えば、図7に示すように、サブミラー107の静止位置がサブミラー回転軸107aを中心に点線で示す107’のように変化した場合を考える。なお、主ミラー103の積算作動回数による静止位置の変化については、サブミラー107に比較して、焦点検出装置108に及ぼす影響は少ないために省略する。
【0044】
サブミラー107の静止位置が変化しない場合、即ち初期状態においては、撮影レンズ101の光軸101aは、主ミラー103を通過後、サブミラー107により図中下方に方向を変更した光軸101cとなり、焦点検出装置108に導かれる。一方、サブミラー107の静止位置が変化し、図中点線で示す107’のようになった場合、撮影レンズ101の光軸101aは主ミラー103を通過後、サブミラー107’によって光路を変更され、101c’となる。したがって、1次結像面102aも図中点線で示される102a’のように図中右方かつ上方にずれながら傾く。
【0045】
図8は、図6と同様の要部拡大図であり、サブミラー107が、図7における107’の静止位置に変位した場合にパターン6をイメージセンサ118上へ投影した図である。なお、図5及び図6と同様、撮影レンズ101の焦点は画像記録媒体102上に結像している。又図中、上記した各図と同一の符号を付した部分は同じ機能を有する部分であり、その詳細は省略する。
【0046】
上記図7に示したように、1次結像面102aが102a’となり、1次結像面が撮影レンズ101側に移動し、1次結像面からイメージセンサ118までの光路長が長くなるので、一対のパターン像9a,9bは互いに像間隔が縮まる方向に移動し、図8の点線で示される9a’,9b’となる。なお、厳密には一対のパターン像10a,10bのそれぞれの移動量は異なる。それに伴い、イメージセンサ118による像信号10a,10bも、図中点線で示される10a’,10b’となり、公知の像間隔検出処理によってサブミラー107の静止位置変化後の像間隔Z1 が算出される。
【0047】
ここで、初期状態の像間隔Z0 とサブミラー107の静止位置変化後の像間隔Z1 から、以下の式(1)により像間隔ずれ量ΔZ1 を算出する。
【0048】
ΔZ1 =Z1 −Z0 …………(1)
この像間隔ずれ量ΔZ1 を撮影レンズ101の焦点調節量に反映することで、サブミラー107の静止位置が変化しても高精度の焦点検出を実現することができる。
【0049】
以上、ここまでは、サブミラー107上のパターン8aについて説明してきたが、パターン8bについても同様であるため、その説明は省略する。
【0050】
次に、焦点検出信号の補正に関連した実際の動作について説明する。
【0051】
図9は、本実施の形態に係るカメラの回路構成を示すブロック図であり、上記の各図と同じ機能を有する部分には同一符号を付してある。
【0052】
イメージセンサ118には焦点検出回路110が接続され、更に焦点検出回路110は処理装置であるマイクロコンピュータ109に接続されており、イメージセンサ118の受光領域指定や、光電荷の蓄積制御を行っている。マイクロコンピュータ109は、CPU(中央処理部)109a,ROM109b,RAM109c,EEPROM(電気的消去可能プログラマブルROM)109dを有し、ROM109bに格納されているプログラムにしたがって焦点検出動作を実行する。
【0053】
また、EEPROM109dには、焦点検出光学系の光学情報などが調整工程時に予め格納されている。更に、マイクロコンピュータ109には、撮影者により操作されるレリーズボタンの第1のストロークによりONするスイッチSW1、第2のストロークによりONするスイッチSW2が接続されている。また、主ミラー103及びサブミラー107を撮影時に撮影光路外へ退避させるミラー駆動手段111を駆動する為のミラー駆動回路112、撮影レンズ101の不図示のフォーカスレンズ列を焦点検出状態に従って調節移動させるレンズ駆動手段113を駆動する為レンズ駆動回路114が、それぞれマイクロコンピュータ109に接続されている。
【0054】
次に、ROM109bに格納されている焦点検出処理プログラムに従って処理を進めるマイクロコンピュータ109の動作について、図10のフローチャートを用いて説明する。
【0055】
まず、ステップ#101において、撮影者によりレリーズボタンが操作されてスイッチSW1がONしたかを判定し、ONすることによりステップ#102へ進む。そして、このステップ#102において、予め選択された少なくとも1つの焦点検出枠に対応したイメージセンサ118の各領域において光電荷蓄積を開始し、蓄積された電荷を一対の像信号として読み出し、RAM109cに格納する。続くステップ#103においては、像信号の信頼性を判定し、信頼性が所定条件を満たしていない場合は焦点検出不能と判定してステップ#104へ進み、焦点検出不能時の処理に進む。
【0056】
一方、焦点検出信号の信頼性が所定条件を満たしている場合はステップ#103からステップ#105へ進み、一対の像信号に焦点検出光学系の収差による補正を施した後、特定周波数成分を取り除くデジタルフィルタ演算処理を実行する。そして、次のステップ#106において、一対の像信号に対して公知の像間隔検出処理を施すことで、合焦時の像間隔と現在の像間隔から像ずれ量を算出する。なお、合焦時の像間隔は、図3で説明した焦点検出領域毎に異なり、それぞれ焦点検出領域における合焦時の像間隔が予めEEPROM109dに格納されている。その後、温度による像間隔の補正など各種補正が行われ、先に選択された焦点検出枠における撮影レンズ101の焦点調節量が算出される。
【0057】
次に、ステップ#107において、算出された焦点調節量から撮影レンズ101の不図示のフォーカスレンズの駆動量を算出し、レンズ駆動回路114を経て算出した駆動量だけレンズ駆動装置113を駆動し、撮影レンズ101の焦点調節を行う。そして、次のステップ#108において、レンズ駆動後の焦点調節状態が合焦範囲内にあるか否かを判定し、合焦範囲内にあると判定した場合はステップ#109へ進み、一方、合焦範囲内にないと判定した場合はステップ#102の焦点検出処理へ戻る。
【0058】
ステップ#109へ進むと、ここでは図4及び図5に示される、パターン8a及び8bが投影されたイメージセンサ118の一対の光電変換素子列4a,4b及び6a,6bの領域▲3▼において蓄積された光電荷を一対の像信号として読み出し、RAM109に格納する。ここでは、パターン8a及び8bに関する2つの一対の像信号が格納される。そして、次のステップ#110において、一対の像信号の信頼性を判定し、2つの一対の像信号のうちどちらか一方の、若しくは両方の一対の像信号の信頼性が所定条件を満たしていると判定した場合はステップ#111へ進み、信頼性が所定条件を満たしていないと判定した場合は直ちにステップ#116へ進み、パターン検出処理を終了する。
【0059】
ここで、信頼性の判定方法としては、図5を用いて説明したように、均一で適切な輝度の被写体を検出した場合のパターン8a及び8bに関する像信号を予め製造工程時にEEPROM109dに格納しておき、この像信号とパターン検出時の像信号の相関量に基づいて判定するなどの方法が考えられる。
【0060】
像信号の信頼性が所定条件を満たしているとしてステップ#111へ進むと、ここでは一対の像信号に焦点検出光学系の収差による補正を施した後、特定周波数成分を取り除くデジタルフィルタ演算処理を行う。そして、次のステップ#112において、まず、信頼性が所定条件を満たしていると判定された一対の像信号に対して公知の像間隔検出処理を施し、像間隔を算出する。次に、予め製造工程時にEEPROM109dに格納された初期状態の像間隔から、前記式(1)により像間隔ずれ量を算出し、同時に積算検出回数を算出する。ここでの積算検出回数とは、上記ステップ#110における信頼性判定で所定条件を満たしている場合を1回とした、現在までの積算回数を意味し、次回のステップ#112を通過するときには1回増加した値に書き換えられる。
【0061】
ここで、積算検出回数n回のときのパターン8aによる像間隔ずれ量をΔZan、パターン8bによる像間隔ずれ量をΔZbnとすると、以下の式(2)により代表像間隔ずれ量ΔZn が算出される。
【0062】
ΔZn =(ΔZan+ΔZbn)/2 …………(2)
但し、上記ステップ#110の信頼性判定の結果により、像間隔ずれ量ΔZan、若しくは像間隔ずれ量ΔZbnのどちらか一方しか算出されなかった場合は、上記式(2)に依らず、算出された方の像間隔ずれ量を代表像間隔ずれ量ΔZn とする。
【0063】
次のステップ#113においては、代表像間隔ずれ量ΔZn とそのときの積算検出回数nをEEPROM109dに格納する。そして、次のステップ#114において、積算検出回数nが閾値m以上か否かを判定し、閾値m以上の場合(この時の積算検出回数をmと記す)はステップ#115の補正量算出へ進み、閾値mより小さい場合はステップ#118へ進む。ここで、このように閾値mを設けるのは、サブミラー107の作動1回毎の静止位置の微少なばらつき、被写体によるパターン検出信号のばらつきなどによる影響を除去するためで、複数のパターン検出結果を用いて補正することにより、高精度な焦点検出が実現できるからである。
【0064】
なお、サブミラー107の作動回数増加に比べて、積算検出回数nが極端に少なく閾値mに届きそうにない場合は、サブミラー107の作動回数に応じて閾値mの値を変化させるようにし、適切なタイミングで補正が行われるようにするのが望ましい。
【0065】
次にステップ#115へ進むと、ここでは上記ステップ#113にてEEPROM109dに格納した複数の代表像間隔ずれ量ΔZ1 ,ΔZ2 ,・・・ ,ΔZm から像間隔修正量ΔZC を導き出す。このとき像間隔修正量ΔZC は検出された複数の代表像間隔ずれ量ΔZ1 ,ΔZ2 ,・・・ ,ΔZn ,・・・ ,ΔZm の平均値として求める。すなわち以下の式(3)となる。
【0066】
ΔZC =(ΔZ1 ,ΔZ2 ,・・・ ,ΔZn ,・・・ ,ΔZm )/m…………(3)
この像間隔修正量ΔZC にそれぞれの焦点検出領域に応じた係数を乗じ、焦点検出領域別の像間隔修正量を算出する。例えば、図3の焦点検出枠7a(なお、図3の7a〜7dは実際には前述した様に焦点検出枠の投影像であるが、便宜上、これを焦点検出枠とも記す)に対応した焦点検出領域における係数をCFP1 とすると、焦点検出領域別像間隔修正量ΔZFP1Cは、以下の式(4)により算出される。
【0067】
ΔZFP1C= CFP1 × ΔZC …………(4)
このように像間隔修正量ΔZC に、焦点検出領域に応じた係数CFPを乗じるのは、図7に示すように、サブミラー107の静止位置はサブミラー回転軸107aを中心に変化すると仮定すると、焦点検出光学系の光路長変化は、サブミラー107上の光束反射位置によって異なるからである。上式(4)より求められた焦点検出領域別像間隔修正量ΔZFP1Cに基づいて、あらかじめEEPROM109dに格納された初期状態の合焦時の像間隔を修正し、上記ステップ#113にて格納される積算検出回数nをリセットし、0とする。
【0068】
今、焦点検出枠7aに対応した焦点検出領域における初期状態合焦時の像間隔をZFP1 とすると、以下の式(5)に従って像間隔ZFP1 は書き換えられ、次回の焦点検出からサブミラー107の静止位置変化に伴う像間隔のずれが補正される。
【0069】
ZFP1 =ZFP1 +ΔZFP1C …………(5)
同様にして、その他の焦点検出枠7b〜7eに対応した焦点検出領域においても像間隔のずれが補正される。また、焦点検出領域に応じた係数CFP1 は、実験的にサブミラー107の作動回数増加に伴う静止位置変化を測定し、その実験結果から推定される定数であり、あらかじめ決定されている。
【0070】
次に、ステップ#116において、レリーズボタンの第2のストロークによってONするスイッチSW2が撮影者によって操作された否かを判定し、該スイッチSW2がONした場合はステップ#117へ進み、ミラー駆動回路112を介してミラー駆動手段111を駆動し、主ミラー103及びサブミラー107を撮影光束外へ退避させ、不図示のシャッタ開閉により撮影を実行し、一連の動作を終了させる。
【0071】
また、上記ステップ#116にてスイッチSW2がONしていなければステップ#118へ進み、ここではスイッチSW1のON,OFFを再度確認し、ON状態を維持していればステップ#118へ戻り、OFFしていればステップ#101のスタート状態に復帰する。
【0072】
図11は本発明の実施の第1の形態における像間隔修正量ΔZC を示す図であり、ここでは像間隔修正量ΔZC を積算検出回数m回毎に更新していくことを示している。ここで用いられる像間隔修正量ΔZC は、前述のように代表像間隔ずれ量ΔZn の蓄積データから求められる平均値である。
【0073】
初回の0回からm1 回までは代表像間隔ずれ量ΔZn の蓄積データがないため修正は行われないが、ここでは従来例の説明で述べたように光学部材(サブミラー)の作動積算回数と焦点検出信号補正量の関係を記憶しておき、この補正量を反映している。
【0074】
次のm1 回からm2 回までは、0回からm1 回までの検出結果から求められた像間隔修正量ΔZC1を用いて各焦点検出領域別の像間隔修正量を算出し、焦点検出光学系の補正を行う。その後は同様に、mn 回からmn+1 回まではmn-1 回からmn 回までの検出結果から求められた像間隔修正量ΔZCnを用いて各焦点検出領域別の像間隔修正量を算出し、焦点検出光学系の補正を行う。
【0075】
以上のように、上記実施の第1の形態によれば、サブミラー107の作動回数が増加して回転支持部材や静止位置を規制するための部材の摩耗により、該サブミラー107の静止位置が変化し、焦点検出光学系の光路長変化によって撮影レンズ101の合焦位置と焦点検出演算により得られる合焦位置がずれても、サブミラー107上に設けられたパターン8a,8bによる像間隔ずれを検出することで、この検出結果に応じて焦点検出結果を補正することが可能となり、焦点検出光学系を構成する光学部材の作動回数に影響されない高精度の焦点検出を実現することができる。また、パターン8a,8bの検出を撮影レンズ101の合焦後に行うようにしているので、合焦スピードを低下させることもない。
【0076】
この実施の形態では、位相差方式の焦点検出装置を用いて説明したが、コントラスト(ぼけ)検出方式の焦点検出装置にも応用は可能であり、この場合、パターンによる初期状態からの像ずれを検出し、この検出結果に応じて焦点検出結果を補正すればよい。
【0077】
(実施の第2の形態)
図12は本発明の実施の第2の形態による焦点検出光学系の補正量を示す図である。ここでも像間隔修正量ΔZC を積算検出回数m回毎に更新していくことを示している。なお、カメラの構成は上記実施の第1の形態と同様であるので、その説明は省略する。
【0078】
ここで用いられる像間隔修正量ΔZC は代表像間隔ずれ量ΔZn の蓄積データと検出回数mとの相関から推定して求められる近似式から決定される補正量である。例えば、1次関数に近似した場合は式(6)のようになる。なお、kは推定して求める定数、ΔZcaは各区間で始点となる補正量である。
【0079】
ΔZc = kn ×m+ΔZca …………(6)
初回の0回からm1 回までは代表像間隔ずれ量ΔZn の蓄積データがないため修正は行われないが、ここでは従来例の説明で述べたように光学部材(サブミラー)の作動積算回数と焦点検出信号補正量の関係を記憶しておき、この補正量を反映している。次のm1 回からm2 回までの像間隔修正量ΔZc は、0回からm1 回までの検出結果から推定された1 次近似式の傾きk1 とあらかじめ記憶しているm1 回における補正量ΔZc1を始点として決定される。m1 回からm2 回まではこのようにして求められた像間隔修正量ΔZC1を用いて各焦点検出領域別の像間隔修正量を算出し、焦点検出光学系の補正を行う。
【0080】
その後、同様にmn 回からmn+1 回までの像間隔修正量ΔZc は、mn-1 回からmn 回までの検出結果から推定された1次近似式の傾きkn とmn 回における補正量ΔZcnを始点として決定され、これを用いて各焦点検出領域別の像間隔修正量を算出し、焦点検出光学系の補正を行う。
【0081】
当然ながら代表像間隔ずれ量ΔZn の蓄積データと検出回数mとの相関から推定して求められる近似式は1次式に限定せず、より正確に近似できる場合は1次以外の式に近似すればよい。
【0082】
(実施の第3の形態)
図13は本発明の実施の第3の形態による焦点検出光学系の補正量を示す図である。なお、カメラの構成は上記実施の第1の形態と同様であるので、その説明は省略する。
【0083】
上記実施の第2の形態では、各区間における像間隔修正量ΔZCnの始点を前区間で決定された終点としているが、この方法では誤差が積み重なる虞れがある。
【0084】
そこで、本発明の実施の第3の形態では、各区間の始点位置を不連続とし、毎区間毎に始点位置を再決定するようにしたものである。式で表せば前述の(6)と同様であるが、ここでのΔZcaは前区間から求められる平均値とする。すなわち、mn 回からmn+1 回までの像間隔修正量ΔZc はmn-1 回からmn 回までの検出結果から推定された1次近似式の傾きkn と、mn-1 回からmn 回までの検出結果から求められる平均値ΔZcaで決定される。
【0085】
これにより、前区間から推定された補正量に対して毎区間毎に再修正がかかることになりより高精度な像間隔修正量ΔZc が求められる。これを用いて各焦点検出領域別の像間隔修正量を算出し、焦点検出光学系の補正を行う。
【0086】
以上の実施の各形態によれば、イメージセンサ118へ光束を導くために使用する光学部材(サブミラー107)の有効範囲内にパターン8a,8bを設け、前記イメージセンサ118で前記パターン8a,8bに関する光量分布を検出し、この複数回の検出結果に基づいて撮影レンズの焦点検出に関する補正量を算出するようにしているため、光学部材の作動回数増加により該光学部材とイメージセンサ118の相対位置関係が初期状態から変化しても、パターン8a,8bに関する光量分布のずれをイメージセンサ118で検出することで、光学部材の位置変化を知ることができ、パターン8a,8bに関する光量分布のずれ検出結果に基づいて焦点検出回路110により得られる情報を補正することで、光学部材の位置変化に左右されない高精度な焦点検出を実現できる。
【0087】
また、撮影レンズの焦点検出に関する補正量を、光量分布の検出回数が所定回数に至る毎に更新するようにしているので、パターン検出信号のばらつき等による影響を除去でき、安定して高精度な焦点検出に関する補正ができる。
【0088】
また、前記補正量を、所定回数の光量分布の検出結果の平均値とすることにより、パターン検出信号のばらつき等による影響を除去しながらより安定して高精度な焦点検出を実現できる。
【0089】
また、前記補正量を、光量分布の検出回数に応じて変化する値とすることにより、パターン検出信号のばらつき等による影響を除去しながらより安定して高精度な焦点検出を実現できる。
【0090】
また、本実施の形態におけるカメラとは、画像記録媒体102をフィルムとすれば銀塩カメラを意味し、画像記録媒体102をセンサ等の撮像素子とすればデジタルカメラを意味することは云うまでもない。
【0091】
【発明の効果】
以上説明したように、本発明によれば、焦点検出光路内に具備される光学部材の作動回数の増加により焦点検出時における該光学部材に位置変化が生じ、焦点検出光学系の光路長が変化しても、焦点検出手段により得られる合焦位置と結像面での合焦位置のずれを適正に補正し、高精度な焦点検出を行うことができるカメラを提供できるものである。
【図面の簡単な説明】
【図1】本発明の実施の第1の形態に係るカメラの光学的構成を示す概略図である。
【図2】図1のイメージセンサの受光面の概略構成を示す図である。
【図3】図1の画像記録媒体上に、イメージセンサの光電変換素子列及び焦点検出枠を逆投影した図である。
【図4】本発明の実施の第1の形態においてサブミラー反斜面のパターンを示す図である。
【図5】図1のイメージセンサの受光面に図4のパターンを投影した図である。
【図6】図5のイメージセンサの要部を拡大省略した図である。
【図7】図1のサブミラーの付近を拡大した要部拡大図である。
【図8】図5のイメージセンサの要部を拡大省略した図である。
【図9】本発明の実施の第1の形態に係るカメラの回路構成を示すブロック図である。
【図10】本発明の実施の第1の形態に係るカメラの主要部分の動作を示すフローチャートである。
【図11】本発明の実施の第1の形態での像間隔修正量を示す図である。
【図12】本発明の実施の第2の形態での像間隔修正量を示す図である。
【図13】本発明の実施の第3の形態での像間隔修正量を示す図である。
【図14】従来のカメラの光学的構成及び回路構成を示す概略図である。
【図15】位相差(像ずれ)方式の原理を示す図である。
【符号の説明】
1 視野マスク
8a,8b パターン
101 撮影レンズ
103 主ミラー
107 サブミラー
109 マイクロコンピュータ
110 焦点検出回路
111 ミラー駆動手段
112 ミラー駆動回路
117 2次結像レンズ
118 イメージセンサ
Claims (5)
- 複数の光電変換素子から成る受光手段と、
焦点検出の際に光路内にあって、撮影レンズを通過した光束を前記受光手段上に導く光学部材と、
前記受光手段からの出力に基づいて前記撮影レンズの焦点状態を検出し、前記撮影レンズを制御する焦点検出手段とを有し、
前記光学部材は一部が低反射率となるように構成されており、該低反射率の部位によりパターンが形成され、
前記焦点検出手段による前記撮影レンズの制御は、前記光学部材に設けられたパターンの像の受光結果を用いることにより、焦点検出信号のずれを補正することを特徴とするカメラ。 - 複数の光電変換素子から成る受光手段と、
焦点検出の際に光路内にあって、撮影レンズを通過した光束を前記受光手段上に導く光学部材と、
前記受光手段からの出力に基づいて前記撮影レンズの焦点状態を検出し、前記撮影レンズを制御する焦点検出手段とを有し、
前記光学部材にはパターンが形成され、
前記焦点検出手段による前記撮影レンズの制御は、前記パターンの像の検出回数が所定回数に至る毎に、前記光学部材に設けられたパターンの像の受光結果を用いることにより、焦点検出信号のずれを補正することを特徴とするカメラ。 - 前記光学部材が撮影光路内に移動させられた際の該光学部材の位置ずれによる前記受光手段における受光位置のずれ量を検出する位置ずれ検出手段を有し、
前記位置ずれ検出手段は、前記パターンの像の光量分布に基づいて、前記パターンの像の受光位置のずれ量を検出することを特徴とする請求項1に記載のカメラ。 - 前記光学部材が撮影光路内に移動させられた際の前記受光手段における前記パターンの像の受光位置情報を記憶している記憶手段を有し、
前記位置ずれ検出手段は、前記光学部材が撮影光路内に移動させられた際の実際の前記受光手段における前記パターンの像の受光位置情報と前記記憶手段が記憶している受光位置情報とを比較することを特徴とする請求項1乃至3の何れかに記載のカメラ。 - 前記位置ずれ検出手段により検出された前記ずれ量に基づいて、前記焦点検出手段により検出される焦点状態を補正する補正量を演算する補正量演算手段を有し、
前記補正量演算手段は、前記パターンの像の複数回の検出結果に基づいて前記補正量を演算し、該補正量に応じて前記焦点検出手段による前記撮影レンズの制御を変えることを特徴とする請求項1乃至4の何れかに記載のカメラ。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001047460A JP4636706B2 (ja) | 2001-02-23 | 2001-02-23 | カメラ |
| US09/938,869 US6640054B2 (en) | 2000-08-30 | 2001-08-24 | Focus detecting device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001047460A JP4636706B2 (ja) | 2001-02-23 | 2001-02-23 | カメラ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2002250859A JP2002250859A (ja) | 2002-09-06 |
| JP2002250859A5 JP2002250859A5 (ja) | 2008-04-10 |
| JP4636706B2 true JP4636706B2 (ja) | 2011-02-23 |
Family
ID=18908885
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001047460A Expired - Fee Related JP4636706B2 (ja) | 2000-08-30 | 2001-02-23 | カメラ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4636706B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4611605B2 (ja) * | 2002-10-28 | 2011-01-12 | 矢崎総業株式会社 | 電線、ワイヤハーネスの受注生産方法及びこれらの受注生産システム |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002072071A (ja) * | 2000-08-30 | 2002-03-12 | Canon Inc | カメラ |
| JP2002098884A (ja) * | 2000-09-21 | 2002-04-05 | Canon Inc | カメラ |
-
2001
- 2001-02-23 JP JP2001047460A patent/JP4636706B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002072071A (ja) * | 2000-08-30 | 2002-03-12 | Canon Inc | カメラ |
| JP2002098884A (ja) * | 2000-09-21 | 2002-04-05 | Canon Inc | カメラ |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002250859A (ja) | 2002-09-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6941068B2 (en) | Image pickup apparatus and image pickup system | |
| JP5168798B2 (ja) | 焦点調節装置および撮像装置 | |
| JP5168797B2 (ja) | 撮像装置 | |
| JP4972960B2 (ja) | 焦点調節装置および撮像装置 | |
| JPH11218673A (ja) | カメラシステム | |
| JPH01237610A (ja) | オートフォーカス装置 | |
| JPH0921943A (ja) | 焦点検出装置を有した光学装置 | |
| JP5157073B2 (ja) | 焦点調節装置および撮像装置 | |
| JP4560420B2 (ja) | 撮像装置 | |
| JP4636706B2 (ja) | カメラ | |
| JP4536893B2 (ja) | カメラ | |
| JP2002072071A (ja) | カメラ | |
| JP2006065080A (ja) | 撮像装置 | |
| JP4104230B2 (ja) | 焦点調節装置 | |
| JP4182546B2 (ja) | 焦点検出装置 | |
| JP2002148508A (ja) | カメラ | |
| JP3313948B2 (ja) | 焦点検出装置及びカメラ | |
| JP2006243350A (ja) | 自動焦点カメラ | |
| JP4020481B2 (ja) | 自動焦点調節装置 | |
| US6640054B2 (en) | Focus detecting device | |
| JP2740749B2 (ja) | オートフォーカス装置 | |
| JP5293121B2 (ja) | 焦点検出装置及びそれを備えた撮像装置 | |
| JP3290361B2 (ja) | カメラの測距装置 | |
| JP3192438B2 (ja) | ズームレンズのレンズ位置制御装置及びそれを有する光学機器 | |
| JP4541808B2 (ja) | 撮像装置及び撮像システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080221 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080221 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20100520 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20100630 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A132 Effective date: 20100720 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100921 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101116 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101122 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131203 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |