JP4635648B2 - 車両用操舵装置 - Google Patents
車両用操舵装置 Download PDFInfo
- Publication number
- JP4635648B2 JP4635648B2 JP2005057613A JP2005057613A JP4635648B2 JP 4635648 B2 JP4635648 B2 JP 4635648B2 JP 2005057613 A JP2005057613 A JP 2005057613A JP 2005057613 A JP2005057613 A JP 2005057613A JP 4635648 B2 JP4635648 B2 JP 4635648B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- reaction force
- control
- road surface
- active
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Description
請求項3に記載の発明は、前記制御手段は、前記検出される路面反力の変化速度が大であるほど、前記振幅を小とすること、を要旨とする。
上記各構成によれば、実行中のアクティブ転舵制御の状態を、効果的に運転者に告知することができ、運転者にさらなる安心感を与えることが可能になる。特に、請求項3の構成では、検出される路面反力の変化速度が大きいほど振幅を小さく、また請求項4の構成では、周波数を大きくするため、アクティブ制御量が大きな場合であっても、それによってステアリングがとられることがない。
図1に示すように、本実施形態のステアリング装置1は、ステアリング(ハンドル)2を含む操舵機構3と転舵輪4の舵角を変更するための転舵機構5とが機械的に非連結、即ちステアリング2と転舵輪4とが機械的に分離された所謂ステアバイワイヤ式の車両用操舵装置である。
図2は、本実施形態のステアリング装置1の制御ブロック図である。同図に示すように、制御装置20は、転舵アクチュエータ8を制御するための第1ECU23と、反力アクチュエータ17を制御するための第2ECU24とを備えている。そして、これら第1ECU23及び第2ECU24は、それぞれ各モータ13,18を制御するためのモータ制御信号を出力するマイコン25,26と、そのモータ制御信号に基づいて各モータ13,18に駆動電力を供給する駆動回路27,28とを備えている。尚、以下に示す、各マイコン25,26内の各制御ブロックは、これらマイコン25,26が実行するコンピュータプログラムにより実現されるものである。
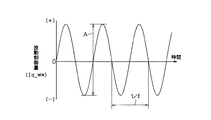
次に、本実施形態の制御装置20によるアクティブ転舵制御時の操舵反力波動制御について説明する。図3は、アクティブ転舵制御時の操舵角θsと転舵角θtとの関係、及びその際の路面反力Frを反映させた場合の操舵反力の変化を示す波形図、そして、図4は、操舵反力波動制御を行った場合の操舵反力Fhの変化を示す波形図である。尚、図3において、曲線mは操舵角θsの変化を示す操舵角曲線、曲線nは転舵角θtの変化を示す転舵角曲線である。また、説明の便宜のため、同図中、操舵角と転舵角との間の比率(伝達比)を補正した上で、操舵角曲線と転舵角曲線とを重ねて記載するものとする。
(1)制御装置20は、アクティブ転舵制御時には、ステアリング2に付与する操舵反力Fhの値を、その開始時の値(保持値F0)に所定の波動成分を重畳した値とすべく反力アクチュエータ17の作動を制御する(操舵反力波動制御)。このような構成とすれば、アクティブ転舵制御時に発生する操舵角θsと対応しない路面反力Frに基づく操舵反力Fhの変動を排除して良好な操舵フィーリングを確保することができる。また、波動成分の重畳によってステアリングが揺動することにより、同アクティブ転舵制御の実行中であることをより確実に運転者に知らしめることができる。従って、例えば、カウンタステア時等、アクティブ転舵制御によって、車両が運転者の想定と異なる挙動を示すような場合であっても、運転者は、その挙動がアクティブ転舵制御によるものであることを認識することができ、これにより、アクティブ転舵制御と逆行するステアリング操作の発生を未然に防止することができる。その結果、こうしたアクティブ転舵制御と逆行するステアリング操作によるアクティブ転舵制御の有効性低下やアクティブ転舵制御の終了遅れ等を効果的に抑制することができるようになる。
・本実施形態では、制御手段としての制御装置20は、転舵アクチュエータ8を制御するための第1ECU23と、反力アクチュエータ17を制御するための第2ECU24とを備えることとした。しかし、これに限らず、転舵アクチュエータ8及び反力アクチュエータ17を制御する制御手段は、第1ECU23及び第2ECU24に相当するものが各々別体に設けられた構成であってもよい。
・本実施形態では、波動制御量演算部48は、検出される路面反力Frの変化速度(路面反力Frの微分値αFr)が大きいほど、振幅Aが小さく周波数fの高い波動制御量Iq_w*を出力し、路面反力Frの変化速度(路面反力Frの微分値αFr)が小さいほど、振幅Aが大きく周波数fの低い波動制御量Iq_w*を出力することとした。しかし、これに限らず、路面反力Frの変化速度に応じて振幅A又は周波数fの一方を変更する構成としてもよい。即ち振幅A又は周波数fの少なくとも何れかを変更する構成であってもよい。また、路面反力Frの変化速度が大きいほど振幅Aを大きくする、或いは周波数fを低くする等、その変更する形態はどのようなものであってもよい。
Claims (4)
- 転舵輪と機械的に分離されたステアリングと、ステアリング操作に応じた前記転舵輪の転舵角を発生させるべく制御される転舵アクチュエータと、前記転舵輪に作用する路面反力を検出する路面反力検出手段と、前記検出される路面反力に応じた操舵反力を前記ステアリングに付与すべく制御される反力アクチュエータと、前記転舵アクチュエータ及び反力アクチュエータの作動を制御する制御手段とを備え、前記制御手段は、ステアリング操作によらず自動的に前記転舵角を変更すべく前記転舵アクチュエータの作動を制御するアクティブ転舵制御機能を有する車両用操舵装置であって、
前記制御手段は、前記アクティブ転舵制御時には、前記ステアリングに付与する操舵反力をアクティブ転舵制御の開始時の値に所定の波動成分を重畳した値とすべく前記反力アクチュエータの作動を制御すること、を特徴とする車両用操舵装置。 - 請求項1に記載の車両用操舵装置において、
前記制御手段は、前記検出される路面反力の変化速度に応じて、前記波動成分の振幅又は周波数の少なくとも一方を変更すること、を特徴とする車両用操舵装置。 - 請求項2に記載の車両用操舵装置において、
前記制御手段は、前記検出される路面反力の変化速度が大であるほど、前記振幅を小とすること、を特徴とする車両用操舵装置。 - 請求項2又は請求項3に記載の車両用操舵装置において、
前記制御手段は、前記検出される路面反力の変化速度が大であるほど、前記周波数を大とすること、を特徴とする車両用操舵装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005057613A JP4635648B2 (ja) | 2005-03-02 | 2005-03-02 | 車両用操舵装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005057613A JP4635648B2 (ja) | 2005-03-02 | 2005-03-02 | 車両用操舵装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006240440A JP2006240440A (ja) | 2006-09-14 |
| JP4635648B2 true JP4635648B2 (ja) | 2011-02-23 |
Family
ID=37047271
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005057613A Expired - Fee Related JP4635648B2 (ja) | 2005-03-02 | 2005-03-02 | 車両用操舵装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4635648B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5853589B2 (ja) * | 2011-10-26 | 2016-02-09 | 日産自動車株式会社 | 運転支援装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0577751A (ja) * | 1991-09-17 | 1993-03-30 | Fuji Heavy Ind Ltd | 車両用ステアリング制御装置 |
| JP2004182008A (ja) * | 2002-11-29 | 2004-07-02 | Toyoda Mach Works Ltd | 車両の操舵制御システム及び操舵システム制御方法 |
| JP3689403B2 (ja) * | 2002-12-12 | 2005-08-31 | 三菱電機株式会社 | 車両用操舵装置 |
| JP4283550B2 (ja) * | 2003-01-24 | 2009-06-24 | 本田技研工業株式会社 | 操舵装置 |
| JP4120427B2 (ja) * | 2003-03-06 | 2008-07-16 | トヨタ自動車株式会社 | 車輌用操舵制御装置 |
| JP4193576B2 (ja) * | 2003-05-14 | 2008-12-10 | トヨタ自動車株式会社 | 車両用操舵装置 |
| JP4294401B2 (ja) * | 2003-07-25 | 2009-07-15 | 富士重工業株式会社 | 車両用走行支援装置 |
-
2005
- 2005-03-02 JP JP2005057613A patent/JP4635648B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006240440A (ja) | 2006-09-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109963766B (zh) | 控制线控转向型转向系统 | |
| EP2492168A1 (en) | Electric power steering device for vehicle | |
| WO2019171447A1 (ja) | 車両のステアリング制御方法および車両のステアリング制御装置 | |
| JP2009023542A (ja) | 車両用操舵装置 | |
| JP4997478B2 (ja) | 車両用操舵装置 | |
| JP4617946B2 (ja) | 車両用操舵装置 | |
| JP5181563B2 (ja) | 車両用操舵装置 | |
| JP7200981B2 (ja) | パワーステアリング制御装置、及びパワーステアリング制御方法 | |
| JP7307000B2 (ja) | 操舵制御装置 | |
| JP7404027B2 (ja) | 操舵制御装置 | |
| JP4826347B2 (ja) | 車両の操舵装置 | |
| JP2014184745A (ja) | 操舵制御装置 | |
| JP5546431B2 (ja) | 電動パワーステアリング装置 | |
| JP6634872B2 (ja) | 車両用制御装置 | |
| JP2009101885A (ja) | 伝達比可変装置 | |
| WO2013132807A1 (ja) | 車両用操舵制御装置及び車両用操舵制御方法 | |
| JP4635648B2 (ja) | 車両用操舵装置 | |
| JP2010188909A (ja) | 電動パワーステアリング装置 | |
| JP2008254521A (ja) | ステアリング装置 | |
| JP4635661B2 (ja) | 車両用操舵装置 | |
| JP4978347B2 (ja) | 車両用操舵装置 | |
| JP2005059645A (ja) | ステア・バイ・ワイヤ式操舵装置におけるウインカーキャンセル装置 | |
| JP4604840B2 (ja) | 車両用操舵装置 | |
| JP5012314B2 (ja) | 車両用操舵装置 | |
| JP4586551B2 (ja) | 車両用操舵装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080212 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091217 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100720 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100917 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101026 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101108 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131203 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4635648 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |