JP4604199B2 - 永久磁石界磁形ブラシレスモータ - Google Patents
永久磁石界磁形ブラシレスモータ Download PDFInfo
- Publication number
- JP4604199B2 JP4604199B2 JP2006041893A JP2006041893A JP4604199B2 JP 4604199 B2 JP4604199 B2 JP 4604199B2 JP 2006041893 A JP2006041893 A JP 2006041893A JP 2006041893 A JP2006041893 A JP 2006041893A JP 4604199 B2 JP4604199 B2 JP 4604199B2
- Authority
- JP
- Japan
- Prior art keywords
- rotor
- permanent magnet
- brushless motor
- torque
- stator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Landscapes
- Brushless Motors (AREA)
- Permanent Field Magnets Of Synchronous Machinery (AREA)
Description
と表されるから、最大トルクは1、最小トルクは

となり、トルク変動が生じることになる。 そこで、ロータRsが発生する脈動トルクの振幅が
となるようにロータRsの界磁の強さを選んだとすると、ロータRsの発生トルクは
となる。
上記の(90°/2PM)は、M=3の場合、ロータRmとロータRsのずれは(15°/P)となり、図6および図11に示す場合の一般式であることがわかる。
(90±10)°/2PM
程度に選べば、変動トルクの低減効果は十分期待される。
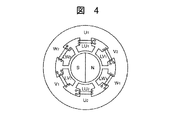
極、LU1,LV1,LW1,LU2,LV2,LW2…電機子巻線。
Claims (2)
- 磁極数2Pを有する永久磁石ロータとM相電機子巻線を有するステータからなる永久磁石界磁ブラシレスモータにおいて、
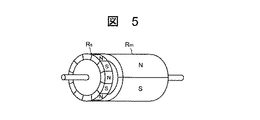
該永久磁石ロータに磁極数4PMを有する変動トルク相殺用永久磁石ロータを同軸上に設置し、
前記永久磁石ロータの特定の磁極の中心線と、該特定の磁極と同極である前記変動トルク相殺用永久磁石ロータの磁極であって前記中心線に対して最寄りの磁極の中心線によって形成されるずれ角が±(90±10)°/2PMであることを特徴とする永久磁石界磁ブラシレスモータ。 - 磁極数2Pを有する永久磁石ロータとM相電機子巻線を有するステータからなる永久界磁ブラシレスモータにおいて、
該永久磁石ロータに歯数2PMを有するリラクタンス形ロータを同軸上に設置し、
前記永久磁石ロータの特定の磁極の中心線と、該リラクタンス形ロータの歯であって前記中心線に対して最寄りの歯の中心線によって形成されるずれ角が±(90±10)°/2PMであることを特徴とする永久磁石界磁ブラシレスモータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006041893A JP4604199B2 (ja) | 2006-02-20 | 2006-02-20 | 永久磁石界磁形ブラシレスモータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006041893A JP4604199B2 (ja) | 2006-02-20 | 2006-02-20 | 永久磁石界磁形ブラシレスモータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007221955A JP2007221955A (ja) | 2007-08-30 |
| JP4604199B2 true JP4604199B2 (ja) | 2010-12-22 |
Family
ID=38498585
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006041893A Active JP4604199B2 (ja) | 2006-02-20 | 2006-02-20 | 永久磁石界磁形ブラシレスモータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4604199B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7847457B2 (en) | 2007-05-09 | 2010-12-07 | Federal-Mogul World Wide, Inc | BLDC motor assembly |
| ITPN20110015A1 (it) * | 2011-03-11 | 2012-09-12 | Mate S A S Di Furlan Massimo & C | Motore elettrico brushless a magnete permanente di tipo monofase |
| US8766578B2 (en) | 2012-02-27 | 2014-07-01 | Canadian Space Agency | Method and apparatus for high velocity ripple suppression of brushless DC motors having limited drive/amplifier bandwidth |
| US20140300232A1 (en) * | 2013-03-08 | 2014-10-09 | Gerald K. Langreck | High acceleration rotary actuator |
| JP6841630B2 (ja) | 2015-10-15 | 2021-03-10 | キヤノンメディカルシステムズ株式会社 | 検体検査装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63157652A (ja) * | 1986-12-19 | 1988-06-30 | Canon Inc | ブラシレスモ−タ |
| JPH04304134A (ja) * | 1991-03-29 | 1992-10-27 | Mitsubishi Kasei Corp | モ−タ |
-
2006
- 2006-02-20 JP JP2006041893A patent/JP4604199B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63157652A (ja) * | 1986-12-19 | 1988-06-30 | Canon Inc | ブラシレスモ−タ |
| JPH04304134A (ja) * | 1991-03-29 | 1992-10-27 | Mitsubishi Kasei Corp | モ−タ |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007221955A (ja) | 2007-08-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5322616B2 (ja) | シェル形磁石を備える永久励磁型の同期機 | |
| JP4519928B2 (ja) | ハイブリッド励磁型同期機 | |
| JP4626382B2 (ja) | 電動機 | |
| TWI414130B (zh) | Single-phase brushless motor | |
| JP5421396B2 (ja) | 主歯及び副歯を有する鉄心コアを備える電動機 | |
| JP6668844B2 (ja) | 回転電機 | |
| JP2006304546A (ja) | 永久磁石式リラクタンス型回転電機 | |
| JP2004274963A (ja) | 電動パワーステアリング装置用永久磁石型モータ | |
| JP4604199B2 (ja) | 永久磁石界磁形ブラシレスモータ | |
| JP5188746B2 (ja) | ブラシレスdcモータ | |
| JP2008187830A (ja) | リラクタンスモータ用ロータ及びそれを備えるリラクタンスモータ | |
| JP2011078202A (ja) | アキシャルギャップモータ | |
| JP5609844B2 (ja) | 電動機 | |
| WO2019202919A1 (ja) | 筒型リニアモータ | |
| KR20130067218A (ko) | 모터 | |
| JP4698062B2 (ja) | ブラシレスdcモータ | |
| JP5538984B2 (ja) | 永久磁石式電動機 | |
| JP4718580B2 (ja) | 永久磁石型回転電機及び電動パワーステアリング装置 | |
| JP5419991B2 (ja) | 永久磁石式同期モータ | |
| JP2006352961A (ja) | Pmモータ | |
| JP5751147B2 (ja) | モータ装置 | |
| JP2000139047A (ja) | 永久磁石形電動機 | |
| JP5195450B2 (ja) | スロットレスモータ | |
| JP2005278268A (ja) | 永久磁石式モータ | |
| JP7387034B2 (ja) | 回転電機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090224 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090420 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091027 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100907 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |