JP4568641B2 - 無線通信システム、ノード位置算出方法及びノード - Google Patents
無線通信システム、ノード位置算出方法及びノード Download PDFInfo
- Publication number
- JP4568641B2 JP4568641B2 JP2005155194A JP2005155194A JP4568641B2 JP 4568641 B2 JP4568641 B2 JP 4568641B2 JP 2005155194 A JP2005155194 A JP 2005155194A JP 2005155194 A JP2005155194 A JP 2005155194A JP 4568641 B2 JP4568641 B2 JP 4568641B2
- Authority
- JP
- Japan
- Prior art keywords
- node
- server
- positioning
- nodes
- synchronization signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
































Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W64/00—Locating users or terminals or network equipment for network management purposes, e.g. mobility management
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0284—Relative positioning
- G01S5/0289—Relative positioning of multiple transceivers, e.g. in ad hoc networks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W52/00—Power management, e.g. TPC [Transmission Power Control], power saving or power classes
- H04W52/02—Power saving arrangements
- H04W52/0209—Power saving arrangements in terminal devices
- H04W52/0212—Power saving arrangements in terminal devices managed by the network, e.g. network or access point is master and terminal is slave
- H04W52/0219—Power saving arrangements in terminal devices managed by the network, e.g. network or access point is master and terminal is slave where the power saving management affects multiple terminals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W52/00—Power management, e.g. TPC [Transmission Power Control], power saving or power classes
- H04W52/02—Power saving arrangements
- H04W52/0209—Power saving arrangements in terminal devices
- H04W52/0251—Power saving arrangements in terminal devices using monitoring of local events, e.g. events related to user activity
- H04W52/0254—Power saving arrangements in terminal devices using monitoring of local events, e.g. events related to user activity detecting a user operation or a tactile contact or a motion of the device
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W52/00—Power management, e.g. TPC [Transmission Power Control], power saving or power classes
- H04W52/02—Power saving arrangements
- H04W52/0209—Power saving arrangements in terminal devices
- H04W52/0261—Power saving arrangements in terminal devices managing power supply demand, e.g. depending on battery level
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02D—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN INFORMATION AND COMMUNICATION TECHNOLOGIES [ICT], I.E. INFORMATION AND COMMUNICATION TECHNOLOGIES AIMING AT THE REDUCTION OF THEIR OWN ENERGY USE
- Y02D30/00—Reducing energy consumption in communication networks
- Y02D30/70—Reducing energy consumption in communication networks in wireless communication networks
Description
荻野敦、他5名、「無線LAN統合アクセスシステム(1)位置検出システムの検討」、2003年総合大会講演論文集、電子情報通信学会、B−5−203、p.662 A.Savvides,C.C.Han,M.B.Srivastava,「Dynamic Fine-Grained Localization in Ad-Hoc Wireless Sensor Networks」,in the proceedings of the International Conference on Mobile Computing and Networking (MobiCom) 2001,Rome,Italy,July 2001
図1は、本発明の第1の実施の形態の単一の無線方式で通信する位置検出システムのブロック図である。

本発明の第2の実施の形態では、ノード108A等及び無線方式変換ノード202A等が、同期信号及び/又は観測信号の送信出力を制御する。
102 ノード位置情報データ
103 センサデータ
104 クライアント
105 センサデータ利用アプリケーション
106 LAN
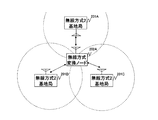
107 無線方式1の基地局
108A、108B、108C、108D、108E、108F、108G、108H、108I ノード
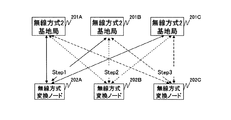
201A、201B、201C 無線方式2の基地局
202A、202B、202C 無線方式変換ノード
1001 同期信号基準局
1401 位置計算処理部
1402 無線方式変換ノード位置情報データ
1403 システム管理ポリシー
1404 ノード状態管理データ
1405 無線方式変換ノード状態管理データ
1406 制御部
1501 要求測位精度マップ
1502 要求測位時間マップ
1801 送信出力テーブル
2301 アンテナ
2302 無線方式1の送信部
2303 無線方式1の受信部
2304 受信電力測定部
2305 制御部
2306 バッテリ状態測定部
2307 バッテリ
2308 センサ情報測定部
2309 センサ
2310 送信出力制御部
2311 観測信号送信部
2312 観測信号受信部
2401 アンテナ
2402 切替スイッチ
2403 無線方式1の送信部
2404 無線方式1の受信部
2405 受信電力測定部
2406 無線方式2の送信部
2407 無線方式2の受信部
2408 制御部
2409 バッテリ状態測定部
2410 バッテリ
2411 送信出力制御部
2412 観測信号送信部
2413 観測信号受信部
2501 アンテナ
2502 無線方式2の送信部
2503 無線方式2の受信部
2504 受信電力測定部
2505 制御部
2506 電源回路
2507 有線送信部
2508 有線受信部
2509 送信出力制御部
2510 観測信号送信部
2511 観測信号受信部
Claims (10)
- 互いに通信する複数のノードと、前記ノード間の通信を用いて前記ノードを測位するサーバと、を備える無線通信システムにおいて、
前記ノードは、
電力を供給するバッテリを有し、
前記バッテリの状態を測定し、
前記ノード間での時刻の同期に用いられる同期信号を受信すると、当該同期信号の受信電力を測定し、
前記測定したバッテリの状態及び前記同期信号の受信電力をサーバに通知し、
前記サーバは、
前記ノードから通知された受信電力に基づいて、前記ノード間の距離の測定に用いられる観測信号の送信出力を決定し、
前記決定した送信出力を前記ノードに通知し、
前記ノードから通知されたバッテリの状態に基づいて、当該ノードの測位方法を決定し、
前記決定した測位方法によって、当該ノードの位置を算出することを特徴とする無線通信システム。 - 前記サーバが決定しうる測位方法は、
測位対象の前記ノードが、前記ノード間での時刻の同期に用いられる同期信号及び前記ノード間の距離の測定に用いられる観測信号を送信し、
測位対象でない前記ノードが、
同期信号及び観測信号を前記測位対象のノードから受信し、
前記サーバが、前記測位対象でないノードが前記同期信号を受信した時刻と当該ノードが前記観測信号を受信した時刻との差に基づいて、前記ノードの位置を算出することを特徴とする請求項1に記載の無線通信システム。 - 前記ノード間での時刻の同期に用いられる同期信号を送信する同期信号基準局を備え、
前記サーバが決定しうる測位方法は、
測位対象の前記ノードが、前記ノード間の距離の測定に用いられる観測信号を送信し、
前記同期信号基準局は、前記観測信号を前記測位対象のノードから受信すると、前記同期信号を送信し、
測位対象でない前記ノードが、
前記観測信号を前記測位対象のノードから受信し、
前記同期信号を前記同期信号基準局から受信し、
前記サーバが、前記測位対象でないノードが前記同期信号を受信した時刻と当該ノードが前記観測信号を受信した時刻との差に基づいて、前記ノードの位置を算出することを特徴とする請求項1に記載の無線通信システム。 - 前記サーバは、
前記ノードから通知されたバッテリの状態及び前記ノードのバッテリの消費量に基づいて、バッテリの交換時期を測位方法ごとに推定し、
推定したバッテリの交換時期に基づいて、前記ノードの測位方法を決定することを特徴とする請求項1に記載の無線通信システム。 - 前記ノードは、前記サーバからの通知に基づいて、観測信号の送信出力を制御することを特徴とする請求項1に記載の無線通信システム。
- 前記ノードは、バッテリの消費量が異なる複数の通信部を有することを特徴とする請求項1に記載の無線通信システム。
- 複数のノード間の通信を用いて前記ノードを測位するサーバにおけるノード位置算出方法であって、
前記ノードのバッテリの状態、及び、前記ノードが他の前記ノードから受信した、前記ノード間での時刻の同期に用いられる同期信号の受信電力を取得し、
前記取得した受信電力に基づいて、前記ノード間の距離の測定に用いられる観測信号の送信出力を決定し、
前記決定した送信出力を前記ノードに通知し、
前記取得したバッテリの状態に基づいて、当該ノードの測位方法を決定し、
前記決定した測位方法によって、当該ノードの位置を算出することを特徴とするノード位置算出方法。 - 互いに通信する複数のノードと、前記ノード間の通信を用いて前記ノードを測位するサーバと、を備える無線通信システムにおけるノードであって、
電力を供給するバッテリを有し、
前記バッテリの状態を測定し、
前記ノード間での時刻の同期に用いられる同期信号を受信すると、当該同期信号の受信電力を測定し、
前記測定したバッテリの状態及び前記同期信号の受信電力をサーバに通知し、
前記サーバから測位方法を通知されると、前記通知された測位方法に対応する処理を実行することを特徴とするノード。 - バッテリの消費量が異なる複数の通信部を有することを特徴とする請求項8に記載のノード。
- 通知された受信電力に基づいて決定される前記ノード間の距離の測定に用いられる観測信号の送信出力を前記サーバから受信し、前記受信した送信出力に基づいて観測信号を制御することを特徴とする請求項8に記載のノード。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005155194A JP4568641B2 (ja) | 2005-05-27 | 2005-05-27 | 無線通信システム、ノード位置算出方法及びノード |
| US11/287,403 US7474646B2 (en) | 2005-05-27 | 2005-11-28 | Wireless communication system, node position calculation method and node |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005155194A JP4568641B2 (ja) | 2005-05-27 | 2005-05-27 | 無線通信システム、ノード位置算出方法及びノード |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006329854A JP2006329854A (ja) | 2006-12-07 |
| JP2006329854A5 JP2006329854A5 (ja) | 2008-01-31 |
| JP4568641B2 true JP4568641B2 (ja) | 2010-10-27 |
Family
ID=37463245
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005155194A Expired - Fee Related JP4568641B2 (ja) | 2005-05-27 | 2005-05-27 | 無線通信システム、ノード位置算出方法及びノード |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7474646B2 (ja) |
| JP (1) | JP4568641B2 (ja) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4824993B2 (ja) * | 2005-11-16 | 2011-11-30 | 株式会社エヌ・ティ・ティ・ドコモ | 測位システム及び測位方法 |
| US7551929B2 (en) * | 2006-05-08 | 2009-06-23 | Skyhook Wireless, Inc. | Estimation of speed and direction of travel in a WLAN positioning system using multiple position estimations |
| US7515578B2 (en) * | 2006-05-08 | 2009-04-07 | Skyhook Wireless, Inc. | Estimation of position using WLAN access point radio propagation characteristics in a WLAN positioning system |
| US7551579B2 (en) * | 2006-05-08 | 2009-06-23 | Skyhook Wireless, Inc. | Calculation of quality of wlan access point characterization for use in a wlan positioning system |
| US7835754B2 (en) | 2006-05-08 | 2010-11-16 | Skyhook Wireless, Inc. | Estimation of speed and direction of travel in a WLAN positioning system |
| US7856234B2 (en) * | 2006-11-07 | 2010-12-21 | Skyhook Wireless, Inc. | System and method for estimating positioning error within a WLAN-based positioning system |
| US8340699B2 (en) * | 2006-12-19 | 2012-12-25 | Sap Ag | Method and system for monitoring high availability support system |
| GB2461674B (en) * | 2007-05-03 | 2012-12-12 | Ericsson Telefon Ab L M | Method and system for trigger negotiation in SUPL |
| US8213954B2 (en) * | 2007-08-28 | 2012-07-03 | Motorola Solutions, Inc. | Method for addressing user location errors in a cognitive radio system |
| US8803737B2 (en) * | 2008-02-29 | 2014-08-12 | Apple Inc. | Location determination |
| US8213389B2 (en) | 2008-04-15 | 2012-07-03 | Apple Inc. | Location determination using formula |
| DE102008021701A1 (de) * | 2008-04-28 | 2009-10-29 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Verfahren und Vorrichtung zur Lokalisation mindestens eines Gegenstandes |
| US20100259444A1 (en) * | 2009-04-08 | 2010-10-14 | Andrei Kosolobov | Method and system for dynamic wireless node capture for a lbs server, client, and reference database |
| JP5549598B2 (ja) * | 2009-04-24 | 2014-07-16 | コニカミノルタ株式会社 | ワイヤレス超音波診断装置、ワイヤレス超音波プローブ及びプローブ認証方法 |
| JP5207400B2 (ja) * | 2009-07-13 | 2013-06-12 | 株式会社日立製作所 | 位置情報提供システム、位置情報提供方法及び測位統合装置 |
| US8874710B2 (en) * | 2010-04-27 | 2014-10-28 | Nokia Corporation | Access network discovery |
| WO2012014008A1 (en) * | 2010-07-30 | 2012-02-02 | Abb Research Ltd | A method and a system for localization in industrial wireless sensor network |
| ITTO20110284A1 (it) * | 2011-03-29 | 2011-06-28 | Sisvel Technology Srl | Procedimento di localizzazione cooperativa e relativi apparati |
| US8549010B2 (en) * | 2011-05-13 | 2013-10-01 | Nokia Corporation | Method and apparatus for providing distributed key range management |
| US8787944B2 (en) * | 2011-08-18 | 2014-07-22 | Rivada Research, Llc | Method and system for providing enhanced location based information for wireless handsets |
| WO2013054549A1 (ja) * | 2011-10-13 | 2013-04-18 | オムロン株式会社 | ネットワークシステム、ノード装置群およびセンサ装置群 |
| US8755331B2 (en) | 2011-12-13 | 2014-06-17 | International Business Machines Corporation | Determining a physical location of a wireless mobile device |
| JP6241036B2 (ja) * | 2013-01-08 | 2017-12-06 | 株式会社リコー | 通信端末、位置管理システム及び通信方法 |
| JP6510988B2 (ja) * | 2016-01-20 | 2019-05-08 | 日本電信電話株式会社 | 位置特定システム、および、位置特定方法 |
| JP6847782B2 (ja) * | 2017-07-07 | 2021-03-24 | 日本電信電話株式会社 | 距離判定システム及び距離判定方法 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02102477A (ja) * | 1988-10-08 | 1990-04-16 | Honda Motor Co Ltd | 超音波測距装置 |
| WO2001061373A1 (en) * | 2000-02-18 | 2001-08-23 | Ericsson Inc. | Handoff between external and internal positioning systems |
| JP2002267734A (ja) * | 2001-03-07 | 2002-09-18 | Casio Comput Co Ltd | 測位装置、及び測位間隔設定方法、運用期間通知方法 |
| JP2003032327A (ja) * | 2001-07-13 | 2003-01-31 | Kyocera Corp | 電話端末及び通信制御装置、並びに蓄電池の交換時期算出方法 |
| JP2003050272A (ja) * | 2001-08-06 | 2003-02-21 | Mitsubishi Heavy Ind Ltd | 移動体の位置計測システムおよび位置計測用制御局 |
| JP2003518261A (ja) * | 1999-12-22 | 2003-06-03 | イノベイティブ テクノロジー ライセンシング エルエルシー | リレーアシストによる追跡のための位置確認システム |
| JP2003207556A (ja) * | 2002-01-10 | 2003-07-25 | Hitachi Ltd | 端末位置情報システムにおける端末およびサーバ装置 |
| JP2004040171A (ja) * | 2002-06-28 | 2004-02-05 | Seiko Epson Corp | 携帯端末及び携帯端末の測位方法切替システム |
| JP2004101254A (ja) * | 2002-09-06 | 2004-04-02 | Hitachi Ltd | 無線システムおよびそのサーバーならびにその基地局 |
| JP2005086579A (ja) * | 2003-09-09 | 2005-03-31 | Advanced Inst Of Wearable Environmental Information Networks | 近距離無線通信による移動体の位置検出システム及び方法 |
| JP2005283236A (ja) * | 2004-03-29 | 2005-10-13 | Seiko Epson Corp | 測位装置、測位装置の制御方法、測位装置の制御プログラム及び測位装置の制御プログラムを格納したコンピュータ読み取り可能な記録媒体 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6314281B1 (en) * | 1998-07-14 | 2001-11-06 | Lucent Technologies Inc. | Method and apparatus for precisely locating a mobile unit |
| US6751455B1 (en) * | 1999-09-17 | 2004-06-15 | The Regents Of The University Of California | Power- and bandwidth-adaptive in-home wireless communications system with power-grid-powered agents and battery-powered clients |
| EP1264192B1 (en) * | 2000-02-02 | 2005-04-13 | Nokia Corporation | Position acquisition |
| US7006453B1 (en) * | 2000-03-14 | 2006-02-28 | Lucent Technologies Inc. | Location based routing for mobile ad-hoc networks |
| US6735448B1 (en) * | 2000-11-07 | 2004-05-11 | Hrl Laboratories, Llc | Power management for throughput enhancement in wireless ad-hoc networks |
| US6473038B2 (en) * | 2001-01-05 | 2002-10-29 | Motorola, Inc. | Method and apparatus for location estimation |
-
2005
- 2005-05-27 JP JP2005155194A patent/JP4568641B2/ja not_active Expired - Fee Related
- 2005-11-28 US US11/287,403 patent/US7474646B2/en not_active Expired - Fee Related
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02102477A (ja) * | 1988-10-08 | 1990-04-16 | Honda Motor Co Ltd | 超音波測距装置 |
| JP2003518261A (ja) * | 1999-12-22 | 2003-06-03 | イノベイティブ テクノロジー ライセンシング エルエルシー | リレーアシストによる追跡のための位置確認システム |
| WO2001061373A1 (en) * | 2000-02-18 | 2001-08-23 | Ericsson Inc. | Handoff between external and internal positioning systems |
| JP2002267734A (ja) * | 2001-03-07 | 2002-09-18 | Casio Comput Co Ltd | 測位装置、及び測位間隔設定方法、運用期間通知方法 |
| JP2003032327A (ja) * | 2001-07-13 | 2003-01-31 | Kyocera Corp | 電話端末及び通信制御装置、並びに蓄電池の交換時期算出方法 |
| JP2003050272A (ja) * | 2001-08-06 | 2003-02-21 | Mitsubishi Heavy Ind Ltd | 移動体の位置計測システムおよび位置計測用制御局 |
| JP2003207556A (ja) * | 2002-01-10 | 2003-07-25 | Hitachi Ltd | 端末位置情報システムにおける端末およびサーバ装置 |
| JP2004040171A (ja) * | 2002-06-28 | 2004-02-05 | Seiko Epson Corp | 携帯端末及び携帯端末の測位方法切替システム |
| JP2004101254A (ja) * | 2002-09-06 | 2004-04-02 | Hitachi Ltd | 無線システムおよびそのサーバーならびにその基地局 |
| JP2005086579A (ja) * | 2003-09-09 | 2005-03-31 | Advanced Inst Of Wearable Environmental Information Networks | 近距離無線通信による移動体の位置検出システム及び方法 |
| JP2005283236A (ja) * | 2004-03-29 | 2005-10-13 | Seiko Epson Corp | 測位装置、測位装置の制御方法、測位装置の制御プログラム及び測位装置の制御プログラムを格納したコンピュータ読み取り可能な記録媒体 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006329854A (ja) | 2006-12-07 |
| US20060268795A1 (en) | 2006-11-30 |
| US7474646B2 (en) | 2009-01-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4568641B2 (ja) | 無線通信システム、ノード位置算出方法及びノード | |
| Čabarkapa et al. | Comparative analysis of the bluetooth low-energy indoor positioning systems | |
| EP1355283B1 (en) | Positional information management system and method | |
| CN107192980B (zh) | 用于移动设备定位的自适应被动扫描和/或主动探测技术 | |
| CN108370551B (zh) | 基于到达时间差定位方法、用户设备及网络设备 | |
| EP2360973B1 (en) | A method and system for location-based dynamic radio selection | |
| JP6087556B2 (ja) | 無線通信端末、無線通信装置、無線通信システム、周波数帯切替方法 | |
| EP2567250B1 (en) | Signal phase-based location of network nodes | |
| JP2008167440A (ja) | 無線マルチホップネットワークにおける測位方法及び装置 | |
| US10976403B2 (en) | Position detection system and receiver | |
| EP4014610B1 (en) | Positioning | |
| JP2016522403A (ja) | モバイルデバイスロケーションの精度および/または不確実性を特徴づけ、それらに影響を及ぼすための方法および装置 | |
| KR20140040839A (ko) | 이동국의 지리적 위치 찾기를 위한 방법 및 장치 | |
| TWI484206B (zh) | 多數個通訊裝置之空間配置及一裝置之空間位置的決定方法 | |
| EP2507646B1 (en) | Message-based location of mobile network nodes | |
| US8805401B2 (en) | Method and system for intelligent switch between client based location and server based location for hybrid location client devices | |
| JP5460587B2 (ja) | 移動通信ネットワークにおける位置測定のための方法と構成 | |
| EP4147502A1 (en) | User equipment, network node and methods in a radio communications network | |
| JP2015102461A (ja) | 移動体端末、装置、制御方法、及びプログラム | |
| JP5089626B2 (ja) | 推定位置に対する評価値を用いた位置推定方法、移動端末及びプログラム | |
| JP4584299B2 (ja) | 位置管理システム、位置管理方法及び管理装置 | |
| WO2019086098A1 (en) | Network access node and methods thereof | |
| KR20120038296A (ko) | 이동 통신 단말의 위치 측위 시스템 및 방법 | |
| Kirci et al. | Wireless sensor networks and efficient localisation | |
| Krasnov et al. | Relative positioning of UWB tags with deferred ranging |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071205 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071205 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100416 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100427 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100628 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100713 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100809 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130813 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |