JP4458809B2 - 自動車の照明装置から射出される光ビームの制御方法、およびこの方法を実施するシステム - Google Patents
自動車の照明装置から射出される光ビームの制御方法、およびこの方法を実施するシステム Download PDFInfo
- Publication number
- JP4458809B2 JP4458809B2 JP2003367421A JP2003367421A JP4458809B2 JP 4458809 B2 JP4458809 B2 JP 4458809B2 JP 2003367421 A JP2003367421 A JP 2003367421A JP 2003367421 A JP2003367421 A JP 2003367421A JP 4458809 B2 JP4458809 B2 JP 4458809B2
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- automobile
- illumination
- road
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000000034 method Methods 0.000 title claims abstract description 60
- 238000005286 illumination Methods 0.000 claims description 27
- 238000013507 mapping Methods 0.000 claims description 7
- 238000012545 processing Methods 0.000 claims description 7
- 101000891547 Homo sapiens Alpha-1,3/1,6-mannosyltransferase ALG2 Proteins 0.000 claims description 6
- 102100034785 Programmed cell death protein 6 Human genes 0.000 claims description 6
- 230000002093 peripheral effect Effects 0.000 claims description 6
- 102100040428 Chitobiosyldiphosphodolichol beta-mannosyltransferase Human genes 0.000 description 8
- 101000891557 Homo sapiens Chitobiosyldiphosphodolichol beta-mannosyltransferase Proteins 0.000 description 8
- 230000001133 acceleration Effects 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 239000006059 cover glass Substances 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000005304 optical glass Substances 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
- B60Q1/14—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights having dimming means
- B60Q1/1415—Dimming circuits
- B60Q1/1423—Automatic dimming circuits, i.e. switching between high beam and low beam due to change of ambient light or light level in road traffic
- B60Q1/143—Automatic dimming circuits, i.e. switching between high beam and low beam due to change of ambient light or light level in road traffic combined with another condition, e.g. using vehicle recognition from camera images or activation of wipers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
- B60Q1/06—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle
- B60Q1/08—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle automatically
- B60Q1/085—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle automatically due to special conditions, e.g. adverse weather, type of road, badly illuminated road signs or potential dangers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
- B60Q1/06—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle
- B60Q1/08—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle automatically
- B60Q1/12—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle automatically due to steering position
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F21—LIGHTING
- F21S—NON-PORTABLE LIGHTING DEVICES; SYSTEMS THEREOF; VEHICLE LIGHTING DEVICES SPECIALLY ADAPTED FOR VEHICLE EXTERIORS
- F21S41/00—Illuminating devices specially adapted for vehicle exteriors, e.g. headlamps
- F21S41/60—Illuminating devices specially adapted for vehicle exteriors, e.g. headlamps characterised by a variable light distribution
- F21S41/62—Illuminating devices specially adapted for vehicle exteriors, e.g. headlamps characterised by a variable light distribution for adaptation between right-hand and left-hand traffic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/11—Linear movements of the vehicle
- B60Q2300/112—Vehicle speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/11—Linear movements of the vehicle
- B60Q2300/114—Vehicle acceleration or deceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/12—Steering parameters
- B60Q2300/122—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/13—Attitude of the vehicle body
- B60Q2300/134—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/14—Other vehicle conditions
- B60Q2300/142—Turn signal actuation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/30—Indexing codes relating to the vehicle environment
- B60Q2300/32—Road surface or travel path
- B60Q2300/322—Road curvature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/30—Indexing codes relating to the vehicle environment
- B60Q2300/33—Driving situation
- B60Q2300/331—Driving situation characterised by the driving side, e.g. on the left or right hand side
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/30—Indexing codes relating to the vehicle environment
- B60Q2300/33—Driving situation
- B60Q2300/332—Driving situation on city roads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/30—Indexing codes relating to the vehicle environment
- B60Q2300/33—Driving situation
- B60Q2300/334—Driving situation on motorways
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/30—Indexing codes relating to the vehicle environment
- B60Q2300/33—Driving situation
- B60Q2300/336—Crossings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/30—Indexing codes relating to the vehicle environment
- B60Q2300/33—Driving situation
- B60Q2300/337—Tunnels or bridges
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Lighting Device Outwards From Vehicle And Optical Signal (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
Description
2 自動車
3 ヘッドライト
4 軌跡
5 望ましい照明の方向
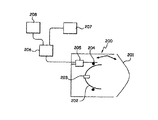
200 ヘッドライト
201 カバーガラス
202 可動支持台
203 光源
204 回転装置
205 モータ
206 データ処理装置
207 センサ
208 ナビゲーションシステム
Claims (15)
- 走行中の自動車の照明装置から射出される光ビームを、道路の形状に合わせて制御する方法であって、
自動車に搭載された少なくとも1つのセンサによって、自動車の動的挙動に関する情報を少なくとも1つ取得し(30)、該動的挙動に関し取得した情報にのみ基づき第1の照明指令(ALG1)を決定し、
道路の形状と信頼率とを含む一連のナビゲーション用データを取得し(20)、前記信頼率を、予め定められた閾値と比較し(40)、
前記信頼率が前記閾値よりも高い場合には、前記ナビゲーション用データの少なくとも一部を勘案して第2の照明指令(ALG2)を決定し、
前記信頼率が前記閾値よりも低い場合には、前記第1の照明指令を前記照明装置に与え
前記方法は、前記信頼率が前記閾値よりも高い場合には、更に、
前記第1の照明指令と前記第2の照明指令とを比較し(80)、
前記第1の照明指令と前記第2の照明指令との差が所定の閾値よりも小さい場合は、前記第2の照明指令を前記照明装置に与え(90,100)、
前記第1の照明指令と前記第2の照明指令との差が所定の閾値よりも大きい場合は、前記第1の照明指令を前記照明装置に与える(50,100)
方法。 - 前記自動車の挙動に関する複数の情報を更に取得することを特徴とする請求項1記載の制御方法。
- 制御データの円滑操作を更に行う(50)(90)ことを特徴とする請求項1または2記載の制御方法。
- 前記照明装置の制御は、光ビームの方向を定めるために行われることを特徴とする請求項1〜3のいずれかに記載の制御方法。
- 前記照明装置の制御は、光ビームの大きさと形状を選択するために行われることを特徴とする請求項1〜4のいずれかに記載の制御方法。
- 前記照明装置の制御は、光ビームの点灯・消灯のために行われることを特徴とする請求項1〜4のいずれかに記載の制御方法。
- 道路(1)上を走行する自動車(2)の照明装置(200)から射出される光ビームを、道路の形状に合わせて制御するためのシステムであって、前記システムは、前記自動車に接続され前記自動車の挙動に関する情報を提供する少なくとも1つのセンサ(207)を備え、
前記自動車に搭載されたナビゲーションシステム(208)と、
請求項1〜6のいずれかに記載の方法を実行するための手段を備え、前記センサおよび前記ナビゲーションシステムによって提供される情報を処理するための装置(206)と、
照明を制御する手段 (205)と
を具備することを特徴とするシステム。 - 前記ナビゲーションシステムは、少なくとも1つのマッピングシステムと、GPSとを含むことを特徴とする請求項7記載の制御システム。
- 前記センサは、自動車に標準装備されているセンサであることを特徴とする請求項7または8記載の制御システム。
- 前記センサは、照明制御のために特別に設置される周辺センサであることを特徴とする請求項7〜9のいずれかに記載の制御システム。
- 前記自動車に標準装備されているセンサと、前記照明制御のため特別に設置される周辺センサとからなる複数のセンサを具備することを特徴とする請求項7〜10にいずれかに記載の制御システム。
- 前記自動車に標準装備されているセンサは、ハンドル操舵角センサ、車輌速度センサ、方位センサ、または遠心力センサであることを特徴とする請求項9記載の制御システム。
- 前記照明制御のため特別に設置される周辺センサは、カメラ、白線検出器または霧検出器であることを特徴とする請求項10記載の制御システム。
- 請求項7〜13のいずれかに記載の制御システムを利用してなる自動車の照明装置。
- 請求項14記載の照明装置を少なくとも1つ具備する自動車。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0213898A FR2846609B1 (fr) | 2002-10-30 | 2002-10-30 | Procede de commande des faisceaux lumineux emis par un dispositif d'eclairage d'un vehicule et systeme de mise en oeuvre de ce procede |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004149116A JP2004149116A (ja) | 2004-05-27 |
| JP4458809B2 true JP4458809B2 (ja) | 2010-04-28 |
Family
ID=32088442
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003367421A Expired - Lifetime JP4458809B2 (ja) | 2002-10-30 | 2003-10-28 | 自動車の照明装置から射出される光ビームの制御方法、およびこの方法を実施するシステム |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US7280901B2 (ja) |
| EP (1) | EP1415856B1 (ja) |
| JP (1) | JP4458809B2 (ja) |
| AT (1) | ATE317780T1 (ja) |
| DE (1) | DE60303580T2 (ja) |
| ES (1) | ES2256696T3 (ja) |
| FR (1) | FR2846609B1 (ja) |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100398065C (zh) * | 2002-10-15 | 2008-07-02 | 沃尔沃技术公司 | 解释对象的头部和眼睛活动的方法和装置 |
| FR2846609B1 (fr) | 2002-10-30 | 2005-08-19 | Valeo Vision | Procede de commande des faisceaux lumineux emis par un dispositif d'eclairage d'un vehicule et systeme de mise en oeuvre de ce procede |
| JP4396428B2 (ja) * | 2003-10-10 | 2010-01-13 | 株式会社デンソー | 車両用前照灯光軸方向自動調整装置 |
| JP4239982B2 (ja) * | 2005-01-25 | 2009-03-18 | 株式会社デンソー | 操作装置および車載電子装置 |
| DE102005033841A1 (de) * | 2005-04-22 | 2006-12-21 | Daimlerchrysler Ag | Scheinwerferanlage für ein Fahrzeug |
| JP2007030739A (ja) * | 2005-07-28 | 2007-02-08 | Fujitsu Ten Ltd | 車載灯具制御装置および車載灯具制御方法 |
| JP4735179B2 (ja) * | 2005-10-12 | 2011-07-27 | 株式会社デンソー | 車両制御装置 |
| CN100375688C (zh) * | 2005-12-06 | 2008-03-19 | 武汉理工大学 | 生物信息大灯转向系统 |
| JP4426535B2 (ja) | 2006-01-17 | 2010-03-03 | 本田技研工業株式会社 | 車両の周辺監視装置 |
| JP4682870B2 (ja) * | 2006-02-24 | 2011-05-11 | 株式会社デンソー | 運転支援装置 |
| US20070282558A1 (en) * | 2006-06-01 | 2007-12-06 | Denso Corporation | Abnormal condition determining system for steering angle sensor |
| US20100019963A1 (en) * | 2006-06-15 | 2010-01-28 | Uti Limited Partnership | Vehicular navigation and positioning system |
| FR2906362B1 (fr) | 2006-09-26 | 2009-01-02 | Valeo Vision Sa | Procede de determination anticipee d'un virage sur une portion de route et systeme associe. |
| FR2914886B1 (fr) | 2007-04-13 | 2010-02-26 | Valeo Vision | Dispositif d'eclairage compact realisant une fonction code virage. |
| DE102007041703A1 (de) | 2007-09-03 | 2009-03-05 | GM Global Technology Operations, Inc., Detroit | Kraftfahrzeug mit einem Navigationssystem und einem AFL-Scheinwerfersystem |
| DE102008054005A1 (de) * | 2008-10-30 | 2010-05-06 | Hella Kgaa Hueck & Co. | Verfahren und Vorrichtung zum Einstellen von Kurvenlichtscheinwerfern, insbesondere bei der Durchfahrt von Kreuzungen oder Einmündungen |
| JP5402335B2 (ja) * | 2009-07-10 | 2014-01-29 | アイシン・エィ・ダブリュ株式会社 | 信頼度評価装置、信頼度評価方法および信頼度評価プログラム |
| DE102009052187A1 (de) * | 2009-11-06 | 2011-05-12 | Audi Ag | Verfahren zum Betrieb eines prädiktiven Kurvenlichtsystems in einem Kraftfahrzeug und Kraftfahrzeug |
| US8645060B2 (en) * | 2010-09-07 | 2014-02-04 | Qualcomm Incorporated | Positioning network availability and reliability based routing |
| KR20120136720A (ko) * | 2011-06-09 | 2012-12-20 | 현대자동차주식회사 | 차량 전조등의 빔 패턴 제어 시스템 및 그 방법 |
| DE102011081394B3 (de) * | 2011-08-23 | 2012-10-31 | Robert Bosch Gmbh | Verfahren und Steuergerät zum Hervorheben eines erwarteten Bewegungspfads eines Fahrzeugs |
| CN103042968A (zh) * | 2012-12-21 | 2013-04-17 | 深圳职业技术学院 | 一种汽车车灯控制方法及控制系统 |
| KR101962727B1 (ko) * | 2012-12-24 | 2019-03-27 | 현대모비스 주식회사 | 네비게이터와 연동되는 차량용 조명 시스템 |
| JP6032248B2 (ja) * | 2014-07-09 | 2016-11-24 | トヨタ自動車株式会社 | 車両用照明装置 |
| JP6082415B2 (ja) * | 2015-03-03 | 2017-02-15 | 富士重工業株式会社 | 車両の走行制御装置 |
| DE102018207160A1 (de) * | 2018-05-08 | 2019-11-14 | Ford Global Technologies, Llc | Scheinwerfersystem eines Kraftfahrzeugs mit verstellbaren Scheinwerfern |
| CN113525225B (zh) * | 2021-08-26 | 2023-07-25 | 深圳市中科创激光技术有限公司 | 车灯调整方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3111153B2 (ja) * | 1995-01-17 | 2000-11-20 | 本田技研工業株式会社 | 車両用前照灯装置 |
| JPH10166934A (ja) * | 1996-12-13 | 1998-06-23 | Koito Mfg Co Ltd | 車輌用灯具装置 |
| JPH10175478A (ja) * | 1996-12-18 | 1998-06-30 | Koito Mfg Co Ltd | 車輌用灯具装置 |
| JP2001114012A (ja) * | 1999-10-15 | 2001-04-24 | Koito Mfg Co Ltd | 車輌用灯具装置 |
| JP3865574B2 (ja) * | 2000-08-09 | 2007-01-10 | 株式会社小糸製作所 | 車両用前照灯システム |
| JP2002193025A (ja) * | 2000-12-27 | 2002-07-10 | Koito Mfg Co Ltd | 車両用前照灯装置 |
| JP4601033B2 (ja) * | 2000-12-27 | 2010-12-22 | 株式会社エクォス・リサーチ | 配光制御装置 |
| FR2846609B1 (fr) | 2002-10-30 | 2005-08-19 | Valeo Vision | Procede de commande des faisceaux lumineux emis par un dispositif d'eclairage d'un vehicule et systeme de mise en oeuvre de ce procede |
-
2002
- 2002-10-30 FR FR0213898A patent/FR2846609B1/fr not_active Expired - Fee Related
-
2003
- 2003-10-21 AT AT03292623T patent/ATE317780T1/de not_active IP Right Cessation
- 2003-10-21 EP EP03292623A patent/EP1415856B1/fr not_active Expired - Lifetime
- 2003-10-21 ES ES03292623T patent/ES2256696T3/es not_active Expired - Lifetime
- 2003-10-21 DE DE60303580T patent/DE60303580T2/de not_active Expired - Lifetime
- 2003-10-28 JP JP2003367421A patent/JP4458809B2/ja not_active Expired - Lifetime
- 2003-10-29 US US10/697,182 patent/US7280901B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004149116A (ja) | 2004-05-27 |
| ATE317780T1 (de) | 2006-03-15 |
| ES2256696T3 (es) | 2006-07-16 |
| EP1415856B1 (fr) | 2006-02-15 |
| US20040085201A1 (en) | 2004-05-06 |
| DE60303580T2 (de) | 2006-12-14 |
| FR2846609B1 (fr) | 2005-08-19 |
| EP1415856A1 (fr) | 2004-05-06 |
| US7280901B2 (en) | 2007-10-09 |
| DE60303580D1 (de) | 2006-04-20 |
| FR2846609A1 (fr) | 2004-05-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4458809B2 (ja) | 自動車の照明装置から射出される光ビームの制御方法、およびこの方法を実施するシステム | |
| CN112498365B (zh) | 基于置信度水平和距离、响应于障碍物的自动驾驶车辆的延迟决策 | |
| US8433510B2 (en) | Method for the anticipated ascertainment of a bend on a portion of road, and associated system | |
| JP5689464B2 (ja) | 車両に対する道路状況のタイプを予測方式で決定する方法 | |
| US6343869B1 (en) | Light unit for vehicle | |
| US7791459B2 (en) | Vehicle light control system | |
| US20090005929A1 (en) | Vehicle behavior learning apparatuses, methods, and programs | |
| US7792621B2 (en) | Apparatus for controlling swivel angles of on-vehicle headlights | |
| EP2594431B1 (en) | Apparatus and method for controlling a headlamp of vehicle | |
| CN102956116A (zh) | 用于突显汽车的期望的运动路径的方法和控制器 | |
| JP2002193025A (ja) | 車両用前照灯装置 | |
| KR101934751B1 (ko) | 차량용 조명 시스템 및 그 제어방법 | |
| JPH08192674A (ja) | 車両用前照灯装置 | |
| US20120275172A1 (en) | Vehicular headlight apparatus | |
| US10882449B2 (en) | Vehicle light platoon | |
| KR20140081379A (ko) | 자동차 및 이에 적용되는 헤드램프 제어방법 | |
| CN112099483A (zh) | 监控自动驾驶车辆中的定位功能的方法 | |
| JP2009255639A (ja) | 車両用オートライト装置 | |
| US11275385B2 (en) | Driving support device, storage medium, and driving support method | |
| KR101460724B1 (ko) | 자동차 및 자동차의 제어방법 | |
| US11588957B2 (en) | Dirty monocular camera detection methods for autonomous driving vehicle | |
| JPH0771908B2 (ja) | 車両用ランプ装置 | |
| US11288528B2 (en) | Differentiation-based traffic light detection | |
| WO2023166696A1 (ja) | ヘッドライト制御装置およびヘッドライト制御方法 | |
| US11807274B2 (en) | L4 auto-emergency light system for future harsh brake |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061006 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090331 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20090624 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20090629 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090731 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100202 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100209 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4458809 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130219 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140219 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |