JP4447949B2 - 位置決め装置の初期化方法、露光装置およびデバイス製造方法 - Google Patents
位置決め装置の初期化方法、露光装置およびデバイス製造方法 Download PDFInfo
- Publication number
- JP4447949B2 JP4447949B2 JP2004089502A JP2004089502A JP4447949B2 JP 4447949 B2 JP4447949 B2 JP 4447949B2 JP 2004089502 A JP2004089502 A JP 2004089502A JP 2004089502 A JP2004089502 A JP 2004089502A JP 4447949 B2 JP4447949 B2 JP 4447949B2
- Authority
- JP
- Japan
- Prior art keywords
- slider
- auxiliary structure
- initialization
- electromagnet
- initialization method
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70716—Stages
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70716—Stages
- G03F7/70725—Stages control
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
- G05B19/19—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by positioning or contouring control systems, e.g. to control position from one programmed point to another or to control movement along a programmed continuous path
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/49—Nc machine tool, till multiple
- G05B2219/49276—Floating, air, magnetic suspension xy table, sawyer motor, xenetics
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20207—Multiple controlling elements for single controlled element
- Y10T74/20341—Power elements as controlling elements
- Y10T74/20354—Planar surface with orthogonal movement only
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Human Computer Interaction (AREA)
- Manufacturing & Machinery (AREA)
- Automation & Control Theory (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
- Control Of Linear Motors (AREA)
- Linear Motors (AREA)
Description
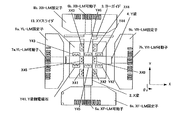
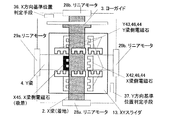
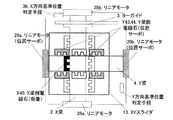
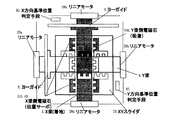
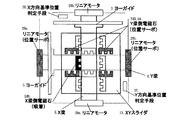
(1)X梁とY梁がクロスバー構成であり、X梁とY梁を取り囲むように構成されたXYスライダが電磁石を搭載した電磁ガイド構成のステージにおいて、X梁およびY梁の少なくとも一方の梁に姿勢を規定するヨーガイドなどを設ける。
ヨーガイドがY梁にあっても、Y梁から同様な手順で行うことができるし、両側についていても同様である。また、基準位置を検出する手段は、遮光版およびフォトスイッチでも良いし、機械的スイッチでも良いし、ストッパ位置への突き当てでも良い。以下、本発明の実施例について図面を参照しながら詳細に説明する
・ 梁に遮光板を設け、基準位置にフォトインタラプタを設ける方法
・ 基準位置にレバースイッチなどの機械的スイッチを設ける方法
・ 基準位置に突き当てストッパを設ける方法
などの方法をとることが望ましい。また、ヨーガイドをY梁4側だけに設ける場合も同様である。
・ 梁に遮光板を設け、基準位置にフォトインタラプタを設ける方法
・ 基準位置にレバースイッチなどの機械的スイッチを設ける方法
・ 基準位置に突き当てストッパを設ける方法
などのいずれかの方法をとることが望ましい。
この露光装置は、半導体集積回路等の半導体デバイスや、マイクロマシン、薄膜磁気ヘッド等の微細なパターンが形成されたデバイスの製造に利用され、原版であるレチクルRを介して基板としての半導体ウエハW上に光源61からの露光エネルギーとしての露光光(この用語は、可視光、紫外光、EUV光、X線、電子線、荷電粒子線等の総称である)を投影系としての投影レンズ(この用語は、屈折レンズ、反射レンズ、反射屈折レンズシステム、荷電粒子レンズ等の総称である)62を介して照射することによって、基板上に所望のパターンを形成している。
Claims (10)
- 互いに直交する第1方向および第2方向に移動可能な対象物と、
前記対象物の位置を計測する対象物位置計測手段と、
前記対象物を第2方向に案内し、第1方向に移動可能な第1補助構造体と、
前記対象物を第1方向に案内し、第2方向に移動可能な第2補助構造体と、
前記第1補助構造体および前記第2補助構造体の側面をそれぞれ挟み込むように前記対象物に設けられた少なくとも2対の電磁石ユニットと、
少なくとも一方の補助構造体の回転を規制する回転規制手段とを有する位置決め装置の初期化方法であって、
前記対象物を前記回転規制手段によって回転を規制された補助構造体に前記電磁石ユニットを用いて吸着する工程と、
前記吸着時に前記対象物位置計測手段をオフセットする工程と、
を有することを特徴とする初期化方法。 - 前記位置決め装置は、前記第1および第2補助構造体の側面に設けられた磁性体部材を有し、前記磁性体部材と前記電磁石ユニットとの間で吸引力を発生することを特徴とする請求項1に記載の初期化方法。
- 前記対象物位置計測手段が前記対象物の相対位置を計測することを特徴とする請求項1または請求項2に記載の初期化方法。
- 前記位置決め装置が、
前記第1補助構造体の第1方向位置を計測する第1位置計測手段と、
前記第2補助構造体の第2方向位置を計測する第2位置計測手段と、
を有することを特徴とする請求項1〜3のいずれかに記載の初期化方法。 - 前記第1位置計測手段および前記第2位置計測手段がそれぞれの相対位置を計測するものであり、
基準位置としての第1基準位置検出手段および第2基準位置検出手段を有することを特徴とする請求項4に記載の初期化方法。 - 前記対象物と前記回転規制手段によって回転を規制された補助構造体とを所定の相対位置関係に維持した状態で、他方の補助構造体を前記対象物に吸着する工程を有することを特徴とする請求項1に記載の初期化方法。
- 前記対象物と前記回転規制手段によって回転を規制された補助構造体とを所定の相対位置関係に維持した状態で、他方の補助構造体を所定の基準位置まで駆動する工程を有することを特徴とする請求項1〜6のいずれかに記載の初期化方法。
- 前記回転規制手段は、第1方向と第2方向の両方向に垂直な軸回りの回転を規制することを特徴とする請求項1〜7のいずれかに記載の初期化方法。
- 請求項1〜8のいずれかに記載の初期化方法によって、基板または原版を位置決めするための位置決め装置を初期化することを特徴とする露光装置。
- 請求項9に記載の露光装置を用いて基板を露光する工程と、
露光された基板を現像する工程とを有することを特徴とするデバイス製造方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004089502A JP4447949B2 (ja) | 2004-03-25 | 2004-03-25 | 位置決め装置の初期化方法、露光装置およびデバイス製造方法 |
| US11/084,115 US7157722B2 (en) | 2004-03-25 | 2005-03-21 | Positioning device and method of initializing a positioning device |
| US11/557,137 US7375346B2 (en) | 2004-03-25 | 2006-11-07 | Positioning device and method of initializing a positioning device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004089502A JP4447949B2 (ja) | 2004-03-25 | 2004-03-25 | 位置決め装置の初期化方法、露光装置およびデバイス製造方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005278325A JP2005278325A (ja) | 2005-10-06 |
| JP2005278325A5 JP2005278325A5 (ja) | 2008-02-21 |
| JP4447949B2 true JP4447949B2 (ja) | 2010-04-07 |
Family
ID=34988682
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004089502A Expired - Fee Related JP4447949B2 (ja) | 2004-03-25 | 2004-03-25 | 位置決め装置の初期化方法、露光装置およびデバイス製造方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (2) | US7157722B2 (ja) |
| JP (1) | JP4447949B2 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7428850B2 (en) * | 2005-02-24 | 2008-09-30 | Applied Materials, Israel,Ltd. | Integrated in situ scanning electronic microscope review station in semiconductor wafers and photomasks optical inspection system |
| US7566997B2 (en) * | 2007-03-30 | 2009-07-28 | Baldor Electric Company | Gas bearing system |
| CN102059576B (zh) * | 2010-11-25 | 2012-02-08 | 西安理工大学 | 双轴直线移动微驱动装置 |
| US8803371B2 (en) | 2011-07-11 | 2014-08-12 | Baldor Electric Company | Secondary for linear drive motor comprising sheet of highly permeable magnetic material having synchronized motor teeth, encoder teeth, and commutation tracks integrally formed therein |
| US8418350B2 (en) | 2011-07-11 | 2013-04-16 | Baldor Electric Company | Method of forming a secondary for linear drive motor comprising sheet of highly permeable magnetic material having synchronized motor teeth, encoder teeth, and commutation tracks integrally formed therein |
| US8791608B2 (en) | 2011-07-11 | 2014-07-29 | Baldor Electric Company | Primary for linear drive motor with solid steel stacks |
| US8922068B2 (en) | 2011-07-11 | 2014-12-30 | Baldor Electric Company | Linear drive motor with improved bearing system |
| JP2013211507A (ja) * | 2011-08-08 | 2013-10-10 | Rohm Co Ltd | フォトインタラプタ、フォトインタラプタの製造方法、およびフォトインタラプタの実装構造 |
| CN102837225B (zh) * | 2012-10-12 | 2014-11-19 | 飞迅科技(苏州)有限公司 | 组合式校正定位机构 |
| CN107664920B (zh) * | 2016-07-29 | 2019-04-12 | 上海微电子装备(集团)股份有限公司 | 电磁导轨装置 |
| CN117072561B (zh) * | 2023-10-18 | 2023-12-19 | 无锡星微科技有限公司 | 一种可组合多轴结构及具有该结构的直线运动平台 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0564487A (ja) | 1991-09-04 | 1993-03-12 | Canon Inc | 位置決めテーブル装置 |
| JPH11316607A (ja) | 1998-04-30 | 1999-11-16 | Canon Inc | ステージ装置、露光装置およびデバイス製造方法 |
| EP1189018B1 (de) * | 2000-09-15 | 2009-02-25 | Vistec Electron Beam GmbH | Sechsachsiges Positioniersystem mit magnetfeldfreiem Raum |
| US6788385B2 (en) * | 2001-06-21 | 2004-09-07 | Nikon Corporation | Stage device, exposure apparatus and method |
| JP3762401B2 (ja) | 2002-09-30 | 2006-04-05 | キヤノン株式会社 | 位置決め装置及び露光装置並びにデバイスの製造方法 |
| JP2005005393A (ja) * | 2003-06-10 | 2005-01-06 | Canon Inc | ステージ装置、露光装置、およびデバイス製造方法 |
-
2004
- 2004-03-25 JP JP2004089502A patent/JP4447949B2/ja not_active Expired - Fee Related
-
2005
- 2005-03-21 US US11/084,115 patent/US7157722B2/en not_active Expired - Fee Related
-
2006
- 2006-11-07 US US11/557,137 patent/US7375346B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005278325A (ja) | 2005-10-06 |
| US20070063149A1 (en) | 2007-03-22 |
| US20050211920A1 (en) | 2005-09-29 |
| US7157722B2 (en) | 2007-01-02 |
| US7375346B2 (en) | 2008-05-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4268333B2 (ja) | リソグラフィ投影装置に使うための平衡位置決めシステム | |
| US7375346B2 (en) | Positioning device and method of initializing a positioning device | |
| US7280185B2 (en) | Stage system including fine-motion cable unit, exposure apparatus, and method of manufacturing device | |
| JP4639517B2 (ja) | ステージ装置、リソグラフィーシステム、位置決め方法、及びステージ装置の駆動方法 | |
| US7282874B2 (en) | Alignment apparatus, exposure apparatus, and device manufacturing method | |
| KR101729791B1 (ko) | 노광 장치, 노광 방법, 및 디바이스 제조 방법 | |
| US7348695B2 (en) | Linear motor, moving stage system, exposure apparatus, and device manufacturing method | |
| TWI754681B (zh) | 馬達總成、微影裝置及器件製造方法 | |
| JPH11189332A (ja) | ステージ装置およびこれを用いた露光装置ならびにデバイス製造方法 | |
| US20060044537A1 (en) | Stage alignment apparatus and its control method, exposure apparatus, and semiconductor device manufacturing method | |
| US6777896B2 (en) | Methods and apparatus for initializing a planar motor | |
| KR100715785B1 (ko) | 위치결정장치, 노광장치 및 디바이스 제조방법 | |
| JP4298547B2 (ja) | 位置決め装置およびそれを用いた露光装置 | |
| US20030173833A1 (en) | Wafer stage with magnetic bearings | |
| JP2004228473A (ja) | 移動ステージ装置 | |
| US6686991B1 (en) | Wafer stage assembly, servo control system, and method for operating the same | |
| WO2014136143A1 (ja) | 移動体装置及び露光装置、並びにデバイス製造方法 | |
| US7385318B2 (en) | Positioning system, magnetic bearing, and method of controlling the same | |
| JP4262153B2 (ja) | 位置決め装置およびそれを用いた露光装置 | |
| US6980279B2 (en) | Interferometer system for measuring a height of wafer stage | |
| WO2001081171A1 (en) | Wafer stage with magnetic bearings | |
| JP2004342825A (ja) | 磁気案内装置 | |
| JP2004241576A (ja) | 位置決め装置 | |
| JP2006156554A (ja) | ステージ装置およびそれを用いた露光装置、デバイス製造方法 | |
| WO2016041731A1 (en) | Object table, lithographic apparatus and device manufacturing method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070323 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080107 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20090406 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100119 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100121 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100121 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130129 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140129 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |