JP4442297B2 - ベルト架設装置及び印刷装置 - Google Patents
ベルト架設装置及び印刷装置 Download PDFInfo
- Publication number
- JP4442297B2 JP4442297B2 JP2004119320A JP2004119320A JP4442297B2 JP 4442297 B2 JP4442297 B2 JP 4442297B2 JP 2004119320 A JP2004119320 A JP 2004119320A JP 2004119320 A JP2004119320 A JP 2004119320A JP 4442297 B2 JP4442297 B2 JP 4442297B2
- Authority
- JP
- Japan
- Prior art keywords
- belt
- tension
- tension applying
- deviation
- roller
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Description
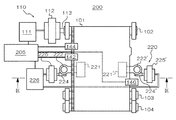
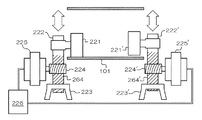
図1は、本発明に係る第1実施形態のベルト架設装置を模式的に示す概略平面図である。図2は、図1のII−II線に沿って切断した状態を模式的に示す概略縦断面図である。図3は、図1のIII−III線に沿って切断した状態を模式的に示す概略部分正面図である。
次に、図7を参照して本発明に係る第2実施形態について説明する。この実施形態のベルト架設装置の機械的構造は第1実施形態のベルト架設装置100と同様であるので、同一部分に関しては図1乃至図6を参照して第1実施形態の符号をそのまま用いることとし、それらの説明は省略する。
次に、図8及び図9を参照して、本発明に係る第2実施形態のベルト架設装置200について説明する。図8は第2実施形態のベルト架設装置200を模式的に示した概略平面図である。図9は図8のIX−IX線に沿って切断した状態を模式的に示した概略部分正面図である。この実施形態において、第1実施形態と同一部分については同一符号を付して、その説明は省略する。このベルト架設装置200では、第1実施形態と同様のベルト101、架設ローラ102,103,104、ベルト駆動機構110、及び、センサ142,144,146を備えている。
Claims (2)
- 複数のローラに架設されたベルトを具備するベルト架設装置であって、前記ベルトの一部に当接し前記ベルトに張力を与える張力付与部材と、前記ベルトの前記張力が与えられる範囲を変更する張力付与範囲変更手段とを有し、
前記張力付与部材は、前記ベルトの幅方向の両端寄りに一対配置され、前記ベルトに対して接離可能に構成され、
前記張力付与範囲変更手段は、前記ベルトが偏動する方向に配置された前記張力付与部材により前記ベルトに与えられる張力を、前記ベルトが偏動する方向と逆方向に配置された前記張力付与部材により前記ベルトに与えられる張力よりも、大きくするように構成されていることを特徴とするベルト架設装置。 - 請求項1に記載のベルト架設装置を具備することを特徴とする印刷装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004119320A JP4442297B2 (ja) | 2004-04-14 | 2004-04-14 | ベルト架設装置及び印刷装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004119320A JP4442297B2 (ja) | 2004-04-14 | 2004-04-14 | ベルト架設装置及び印刷装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005298173A JP2005298173A (ja) | 2005-10-27 |
| JP2005298173A5 JP2005298173A5 (ja) | 2007-06-07 |
| JP4442297B2 true JP4442297B2 (ja) | 2010-03-31 |
Family
ID=35330185
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004119320A Expired - Fee Related JP4442297B2 (ja) | 2004-04-14 | 2004-04-14 | ベルト架設装置及び印刷装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4442297B2 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5040465B2 (ja) * | 2006-08-18 | 2012-10-03 | コニカミノルタホールディングス株式会社 | ベルト搬送装置における蛇行制御手段の調整方法 |
| JP5262550B2 (ja) * | 2008-03-03 | 2013-08-14 | セイコーエプソン株式会社 | ベルト搬送装置、ベルト搬送制御方法 |
| JP5215760B2 (ja) * | 2008-07-22 | 2013-06-19 | 株式会社石川製作所 | シート状ワークの搬送装置及び搬送方法 |
| GB2469816B (en) | 2009-04-28 | 2012-10-31 | Joy Mm Delaware Inc | Conveyor sensor arrangement |
| GB2469815B (en) | 2009-04-28 | 2012-08-29 | Joy Mm Delaware Inc | Armoured face conveyor extendable at head gate end |
| US8973742B2 (en) | 2010-04-26 | 2015-03-10 | Joy Mm Delaware, Inc. | Chain tension sensor |
| GB2471826B (en) * | 2009-04-28 | 2014-02-12 | Joy Mm Delaware Inc | Dual sensor chain break detector |
| US8636140B2 (en) | 2010-04-26 | 2014-01-28 | Joy Mm Delaware, Inc. | Chain tension sensor |
| US9422112B2 (en) * | 2011-07-22 | 2016-08-23 | Joy Mm Delaware, Inc. | Systems and methods for controlling a conveyor in a mining system |
| JP6056654B2 (ja) * | 2013-05-23 | 2017-01-11 | 株式会社長浜製作所 | 不釣合い測定装置 |
| CN103738675B (zh) * | 2013-12-05 | 2015-12-09 | 苏州瑞日纺织科技有限公司 | 一种纺织机械的输送带张紧防偏装置 |
| CN117088072B (zh) * | 2023-10-20 | 2023-12-22 | 山东太升炉业有限公司 | 网带纠偏装置 |
-
2004
- 2004-04-14 JP JP2004119320A patent/JP4442297B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005298173A (ja) | 2005-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4442297B2 (ja) | ベルト架設装置及び印刷装置 | |
| US7873311B2 (en) | Belt transfer device for image forming apparatus | |
| JP4859392B2 (ja) | アイドラ回転の能動的なトラッキングを用いた印刷媒体の位置合わせ | |
| EP1890198B1 (en) | Belt Conveying Device, Image Forming Apparatus Provided Therewith And Adjustment Method Of Belt Skew Controller In Belt Conveyance Device | |
| JP4917769B2 (ja) | 印刷装置 | |
| JP6417858B2 (ja) | 記録装置及び記録装置の制御方法 | |
| JP2009203035A (ja) | ベルト斜行補正制御方法、ベルト搬送装置、記録装置 | |
| US6786325B2 (en) | Guiding a flexible band | |
| JP2006225129A (ja) | 画像形成装置 | |
| US9352922B2 (en) | Web conveying device, printing apparatus, and tension control method | |
| JP5814648B2 (ja) | 媒体搬送装置 | |
| US8641184B2 (en) | Conveying mechanism and recording apparatus including the same | |
| JP2011105507A (ja) | 搬送装置及び画像処理装置 | |
| JP2008290875A (ja) | ベルト搬送装置および画像形成装置 | |
| JP2019010750A (ja) | 印刷装置 | |
| JP7017118B2 (ja) | 搬送装置、及び、画像形成装置 | |
| JP5621962B2 (ja) | 媒体送り装置、記録装置 | |
| JP2006240815A (ja) | 回転位置検出装置および画像形成装置 | |
| JP2007015858A (ja) | シート搬送装置および画像形成装置 | |
| JP6429072B2 (ja) | 搬送装置及び記録装置 | |
| JP6455659B2 (ja) | 記録装置及び記録方法 | |
| US20160257144A1 (en) | Printing apparatus and control method | |
| JP2015007690A (ja) | 無端ベルト装置及び画像形成装置 | |
| JP2012192655A (ja) | 印刷装置 | |
| JP4278627B2 (ja) | 搬送量検出方法およびこれを使用する搬送装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20070403 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070412 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070412 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090911 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091006 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091201 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091222 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100104 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4442297 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130122 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130122 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140122 Year of fee payment: 4 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |