JP4441664B2 - 血管形状測定装置および血流量測定装置 - Google Patents
血管形状測定装置および血流量測定装置 Download PDFInfo
- Publication number
- JP4441664B2 JP4441664B2 JP2004219866A JP2004219866A JP4441664B2 JP 4441664 B2 JP4441664 B2 JP 4441664B2 JP 2004219866 A JP2004219866 A JP 2004219866A JP 2004219866 A JP2004219866 A JP 2004219866A JP 4441664 B2 JP4441664 B2 JP 4441664B2
- Authority
- JP
- Japan
- Prior art keywords
- blood vessel
- section
- array
- cross
- vessel wall
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/48—Other medical applications
- A61B5/4887—Locating particular structures in or on the body
- A61B5/489—Blood vessels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/02007—Evaluating blood vessel condition, e.g. elasticity, compliance
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/06—Measuring blood flow
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/13—Tomography
- A61B8/14—Echo-tomography
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
- A61B8/523—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for generating planar views from image data in a user selectable plane not corresponding to the acquisition plane
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Veterinary Medicine (AREA)
- Pathology (AREA)
- Public Health (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Radiology & Medical Imaging (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Vascular Medicine (AREA)
- Hematology (AREA)
- Cardiology (AREA)
- Physiology (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Description
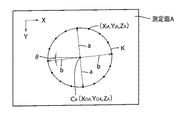
+[ ( Xi −X0 )sin θ+( Yi −Y0 )cos θ]2/b2 =1 ・・・(1)
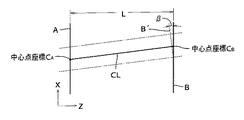
b’=b/cos γ ・・・(3)
但し、cos β=( X0 A−X0 B)/L
cos γ=( X0 A−X0 B)/L
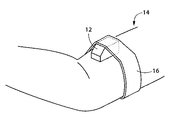
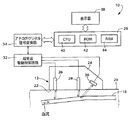
12:超音波プローブ
14:生体の一部(上腕部)
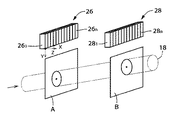
18:上腕動脈(血管)
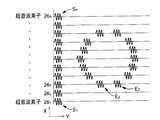
26:第1アレイ
26n :第1超音波素子
28:第1アレイ
28n :第2超音波素子
48:第1血管壁位置演算手段
50:第2血管壁位置演算手段
52:血管断面内形状算出手段
54:中心軸算出手段
56:交差角算出手段
58:形状補正手段
60:直交断面積算出手段
62:血管形状算出手段
66:血流速度算出手段
68:相対角度算出手段
70:血流速度補正手段
72:血流量算出手段
Claims (3)
- 一方向に配列された複数の第1超音波素子を有する第1アレイと、該第1超音波素子の配列方向と平行な方向に配列された複数の第2超音波素子を有する第2アレイとを備え、生体の表皮下に位置する血管に交差して該表皮上に配置された該第1アレイおよび第2アレイから検出されるエコー信号に基づいて該血管の形状を測定する血管形状測定装置であって、
前記第1アレイの各第1超音波素子から放射される放射信号と該各第1超音波素子により検出される前記血管壁からの反射信号との時間差に基づいて該血管壁までの距離をそれぞれ算出し、該距離に基づいて前記第1アレイの測定断面内における血管壁の位置を決定する第1血管壁位置演算手段と、
前記第2アレイの各第2超音波素子から放射される放射信号と各第2超音波素子により検出される前記血管壁からの反射信号との時間差に基づいて該血管壁までの距離をそれぞれ算出し、該距離に基づいて前記第2アレイの測定断面内における血管壁の位置を決定する第2血管壁位置演算手段と、
前記第1血管壁位置演算手段により決定された各第1超音波素子に対応する血管壁部位の位置と前記第2血管壁位置演算手段により決定された各第2超音波素子に対応する血管壁部位の位置とに基づいて、前記血管の直交断面における形状を算出する血管形状算出手段と
を、含み、
該血管形状算出手段は、
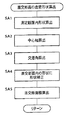
前記第1血管壁位置演算手段により決定された各第1超音波素子に対応する血管壁部位の位置と前記第2血管壁位置演算手段により決定された各第2超音波素子に対応する血管壁部位の位置とに基づいて、前記第1アレイの測定断面内と前記第2アレイの測定断面内とにおける血管壁の断面の中心点と長軸径および/または短軸径とをそれぞれ算出する測定断面内形状算出手段と、
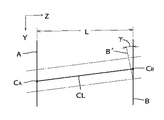
該測定断面内形状算出手段により算出された第1アレイの測定断面と前記第2アレイの測定断面とにおける血管壁の断面の中心点に基づいて該血管の中心軸を算出する中心軸算出手段と、
該中心軸算出手段により算出された血管の中心軸に基づいて、該血管の直交断面と前記測定断面との交差角度を算出する交差角度算出手段と、
該交差角度算出手段により算出された交差角度に基づいて、前記血管の直交断面の長軸径および/または短軸径となるように、前記形状算出手段により算出された長軸径および/または短軸径を補正する補正手段と
を、含むことを特徴とする血管形状測定装置。 - 前記血管形状算出手段は、前記補正手段によって補正された長軸径および短軸径に基づいて前記血管の直交断面における断面積を算出する直交断面積算出手段を、さらに含むものである請求項1の血管形状測定装置。
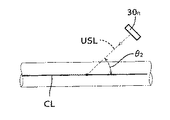
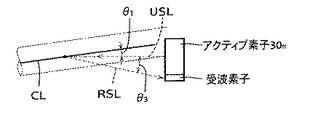
- 一方向に配列された複数の第1超音波素子を有する第1アレイと、該第1超音波素子の配列方向と平行な方向に配列された複数の第2超音波素子を有する第2アレイと、ドップラ用超音波素子とを備え、該第1アレイおよび第2アレイが前記生体の表皮下に位置する血管と交差し且つ該ドップラ用超音波素子からの超音波を放射方向が該血管に対して鋭角を成すように装着される超音波プローブと、
前記ドップラ用超音波素子から前記血管に向かって超音波を放射したときに得られる、該血管内の血流速度に基づくドップラ効果により変化させられるドップラ反射波に基づいて該血流速度を算出する血流速度算出手段と、
前記第1アレイの各第1超音波素子から検出される反射信号に基づいて、前記血管の該第1アレイの直下に位置する部分の血管壁のうち該各第1超音波素子に対応する部位の位置をそれぞれ算出する第1血管壁位置演算手段と、
前記第2アレイの各第2超音波素子から検出されるエコー信号に基づいて、前記血管の該第2アレイの直下に位置する部分の血管壁のうち該各第2超音波素子に対応する部位の位置をそれぞれ算出する第2血管壁位置演算手段と、
前記第1血管壁位置演算手段により算出された各第1超音波素子に対応する血管壁部位の位置と前記第2血管壁位置演算手段により算出された各第2超音波素子に対応する血管壁部位の位置とに基づいて、前記第1アレイの測定断面内と前記第2アレイの測定断面内とにおける血管壁の断面の中心点を算出し、該第1アレイの測定断面と前記第2アレイの測定断面とにおける血管壁の断面の中心点に基づいて該血管の中心軸を算出する中心軸算出手段と、
該中心軸算出手段により算出された前記血管の中心軸と前記ドップラ用超音波素子から該血管に向かって超音波を放射する方向との実際の相対角度を算出する相対角度算出手段と、
該相対角度算出手段により算出された実際の相対角度に基づいて前記血流速度算出手段により算出された血流速度を補正する血流速度補正手段と
を、含む血流速度測定装置を備えた血流量測定装置であって、
前記第1血管壁位置演算手段により算出された各第1超音波素子に対応する血管壁部位の位置と前記第2血管壁位置演算手段により算出された各第2超音波素子に対応する血管壁部位の位置とに基づいて、前記第1アレイの測定断面内と前記第2アレイの測定断面内とにおける血管壁の断面の中心点と長軸径および/または短軸径とをそれぞれ算出する測定断面内形状算出手段と、
前記中心軸算出手段により算出された血管の中心軸に基づいて、該血管の直交断面と前記測定断面との交差角度を算出する交差角度算出手段と、
該交差角度算出手段により算出された交差角度に基づいて、前記血管の直交断面の長軸径および/または短軸径となるように、前記形状算出手段により算出された長軸径および/または短軸径を補正する補正手段と、
該補正手段によって補正された長軸径および短軸径に基づいて前記血管の直交断面における断面積を算出する直交断面積算出手段と、
該直交断面積算出手段により算出された前記血管の直交断面における断面積と前記血流速度補正手段により補正された血流速度とに基づいて、前記血管内の血流量を算出する血流量算出手段と
を、含むことを特徴とする血流量測定装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004219866A JP4441664B2 (ja) | 2004-07-28 | 2004-07-28 | 血管形状測定装置および血流量測定装置 |
| PCT/JP2005/013813 WO2006011544A1 (ja) | 2004-07-28 | 2005-07-28 | 血管形状測定装置、血流速度測定装置、および血流量測定装置 |
| US10/565,675 US7429244B2 (en) | 2004-07-28 | 2005-07-28 | Blood-vessel-shape measuring apparatus, blood-flow-velocity measuring apparatus, and blood-flow-amount measuring apparatus |
| EP05767223A EP1772102A4 (en) | 2004-07-28 | 2005-07-28 | INSTRUMENT FOR MEASURING THE FORM OF A BLOOD VESSEL, INSTRUMENT FOR MEASURING THE SPEED OF BLOOD FLOW AND APPARATUS FOR MEASURING BLOOD FLOW |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004219866A JP4441664B2 (ja) | 2004-07-28 | 2004-07-28 | 血管形状測定装置および血流量測定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006034667A JP2006034667A (ja) | 2006-02-09 |
| JP4441664B2 true JP4441664B2 (ja) | 2010-03-31 |
Family
ID=35786292
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004219866A Expired - Fee Related JP4441664B2 (ja) | 2004-07-28 | 2004-07-28 | 血管形状測定装置および血流量測定装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7429244B2 (ja) |
| EP (1) | EP1772102A4 (ja) |
| JP (1) | JP4441664B2 (ja) |
| WO (1) | WO2006011544A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012085789A (ja) * | 2010-10-19 | 2012-05-10 | Seiko Epson Corp | 血管径測定装置 |
| JP2015107174A (ja) * | 2013-12-03 | 2015-06-11 | 株式会社ユネクス | 生体血管状態測定装置 |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102004043676B4 (de) * | 2004-09-09 | 2014-01-09 | Siemens Aktiengesellschaft | Verfahren zur Visualisierung von Plaqueablagerungen aus 3D-Bilddatensätzen von Gefäßstrukturen |
| US7940974B2 (en) * | 2006-11-21 | 2011-05-10 | General Electric Company | Method and system for adjusting 3D CT vessel segmentation |
| US8160395B2 (en) | 2006-11-22 | 2012-04-17 | General Electric Company | Method and apparatus for synchronizing corresponding landmarks among a plurality of images |
| US8126238B2 (en) * | 2006-11-22 | 2012-02-28 | General Electric Company | Method and system for automatically identifying and displaying vessel plaque views |
| US8244015B2 (en) * | 2006-11-22 | 2012-08-14 | General Electric Company | Methods and apparatus for detecting aneurysm in vasculatures |
| US7957574B2 (en) * | 2006-11-22 | 2011-06-07 | General Electric Company | Methods and apparatus for generating a risk metric for soft plaque in vessels |
| FR2908976B1 (fr) * | 2006-11-24 | 2009-02-20 | Gen Electric | Procede de mesures de dimensions d'un vaisseau. |
| JP5499938B2 (ja) | 2010-06-25 | 2014-05-21 | セイコーエプソン株式会社 | 超音波センサー、測定装置、プローブ、および測定システム |
| JP5499939B2 (ja) * | 2010-06-25 | 2014-05-21 | セイコーエプソン株式会社 | 測定装置、生体検査装置、流速測定方法、および圧力測定方法 |
| JP2015166024A (ja) * | 2015-07-02 | 2015-09-24 | セイコーエプソン株式会社 | 超音波センサーおよび超音波測定装置 |
| US11918413B2 (en) | 2015-11-03 | 2024-03-05 | Koninklijke Philips N.V. | Ultrasound probe, system and method for measuring arterial parameters using non-imaging ultrasound |
| US20180092622A1 (en) * | 2016-09-30 | 2018-04-05 | Robert Bosch Gmbh | Phased Array for Detecting Artery Location to Measure Blood Velocity |
| US20180092621A1 (en) * | 2016-09-30 | 2018-04-05 | Robert Bosch Gmbh | Single piezoelectric transmitter and receiver to detect blood velocities |
| WO2020175515A1 (ja) * | 2019-02-27 | 2020-09-03 | 株式会社村田製作所 | 血管位置検出装置、および、血流量計測装置 |
| JP2023028891A (ja) * | 2021-08-20 | 2023-03-03 | 日本光電工業株式会社 | 生体情報処理方法、生体情報処理装置及びプログラム |
| CN115568876B (zh) * | 2022-11-24 | 2023-05-09 | 苏州圣泽医疗科技有限公司 | 血流速度测量值的修正方法及多普勒血流检测装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1991011146A1 (en) * | 1990-01-25 | 1991-08-08 | Commonwealth Scientific And Industrial Research Organisation | Ultrasonic method and apparatus for determination of vessel location and size |
| JPH0556971A (ja) | 1991-08-30 | 1993-03-09 | Toshiba Corp | 超音波診断装置 |
| US5339816A (en) * | 1991-10-23 | 1994-08-23 | Aloka Co., Ltd. | Ultrasonic doppler blood flow monitoring system |
| JP3381968B2 (ja) | 1993-07-09 | 2003-03-04 | 株式会社東芝 | 超音波診断装置 |
| US6261233B1 (en) * | 1996-01-05 | 2001-07-17 | Sunlight Medical Ltd. | Method and device for a blood velocity determination |
| FR2759892A1 (fr) | 1996-12-31 | 1998-08-28 | Philips Electronics Nv | Systeme d'echographie ultrasonore pour l'examen des arteres |
| JP3857788B2 (ja) | 1997-09-01 | 2006-12-13 | テルモ株式会社 | 循環器情報計測システム |
| AUPP227898A0 (en) | 1998-03-11 | 1998-04-09 | Commonwealth Scientific And Industrial Research Organisation | Improvements in ultrasound techniques |
| JP3378941B2 (ja) | 2000-06-29 | 2003-02-17 | 徳島県 | 位置自動追尾型超音波血流計測装置 |
| US6780155B2 (en) * | 2001-12-18 | 2004-08-24 | Koninklijke Philips Electronics | Method and system for ultrasound blood flow imaging and volume flow calculations |
| JP2004129797A (ja) * | 2002-10-09 | 2004-04-30 | Matsushita Electric Ind Co Ltd | 超音波診断装置 |
-
2004
- 2004-07-28 JP JP2004219866A patent/JP4441664B2/ja not_active Expired - Fee Related
-
2005
- 2005-07-28 WO PCT/JP2005/013813 patent/WO2006011544A1/ja active Application Filing
- 2005-07-28 US US10/565,675 patent/US7429244B2/en not_active Expired - Fee Related
- 2005-07-28 EP EP05767223A patent/EP1772102A4/en not_active Withdrawn
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012085789A (ja) * | 2010-10-19 | 2012-05-10 | Seiko Epson Corp | 血管径測定装置 |
| US9642594B2 (en) | 2010-10-19 | 2017-05-09 | Seiko Epson Corporation | Blood vessel diameter measurement device |
| JP2015107174A (ja) * | 2013-12-03 | 2015-06-11 | 株式会社ユネクス | 生体血管状態測定装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US7429244B2 (en) | 2008-09-30 |
| WO2006011544A1 (ja) | 2006-02-02 |
| EP1772102A1 (en) | 2007-04-11 |
| EP1772102A4 (en) | 2010-11-10 |
| US20060241427A1 (en) | 2006-10-26 |
| JP2006034667A (ja) | 2006-02-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4441664B2 (ja) | 血管形状測定装置および血流量測定装置 | |
| US6673020B2 (en) | Ultrasonic diagnostic apparatus | |
| JP5499939B2 (ja) | 測定装置、生体検査装置、流速測定方法、および圧力測定方法 | |
| EP1273267B1 (en) | Ultrasonic diagnostic apparatus | |
| WO2019205167A1 (zh) | 一种超声瞬时弹性测量设备及方法 | |
| EP1079242B1 (en) | Ultrasound diagnostic apparatus | |
| JP7456151B2 (ja) | 超音波診断装置、超音波診断装置の制御方法、及び、超音波診断装置の制御プログラム | |
| EP1934629B1 (en) | A method for generating hardness and/or strain information of a tissue | |
| JP2001218768A (ja) | 超音波診断装置 | |
| JP6861624B2 (ja) | 超音波送受信装置および超音波送受信方法 | |
| JP5199157B2 (ja) | 超音波診断装置、圧較差測定方法及び血管弾性測定方法 | |
| JP4768100B2 (ja) | 超音波診断装置 | |
| JP2018102589A (ja) | 脈波伝播速度測定装置、血圧測定装置、および脈波伝播速度測定方法 | |
| JP2005074146A (ja) | 超音波測定方法、超音波発生機構 | |
| CN109561880B (zh) | 用于确定心输出量的系统 | |
| JP4620423B2 (ja) | 平滑筋弛緩状態評価装置 | |
| JP2012192133A (ja) | 超音波診断装置および超音波画像生成方法 | |
| JP2002224063A (ja) | 脈波伝播速度計測装置及び超音波診断装置 | |
| JP2970884B2 (ja) | 血管弾性率測定用プローブ装置 | |
| JP4230904B2 (ja) | 超音波診断装置 | |
| JP7224016B2 (ja) | 血管径センサおよび血管径測定装置 | |
| JP2021003214A (ja) | 超音波診断装置、超音波診断装置の制御方法、及び、超音波診断装置の制御プログラム | |
| US20150374330A1 (en) | Blood vessel search device, ultrasonic measurement apparatus, and blood vessel search method | |
| WO2014129203A1 (ja) | 超音波診断装置および超音波診断装置の制御方法 | |
| JP2017192479A (ja) | 画像生成装置及び画像生成方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061031 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090811 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091009 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20091009 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20091009 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091124 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091215 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20091215 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4441664 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130122 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160122 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |