JP4421770B2 - 移動体無線端末の位置を決定する方法およびシステム - Google Patents
移動体無線端末の位置を決定する方法およびシステム Download PDFInfo
- Publication number
- JP4421770B2 JP4421770B2 JP2000510307A JP2000510307A JP4421770B2 JP 4421770 B2 JP4421770 B2 JP 4421770B2 JP 2000510307 A JP2000510307 A JP 2000510307A JP 2000510307 A JP2000510307 A JP 2000510307A JP 4421770 B2 JP4421770 B2 JP 4421770B2
- Authority
- JP
- Japan
- Prior art keywords
- mobile
- toa
- mobile radio
- location
- radio terminal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000000034 method Methods 0.000 title description 33
- 238000005259 measurement Methods 0.000 claims description 85
- 230000001413 cellular effect Effects 0.000 description 26
- 238000010586 diagram Methods 0.000 description 14
- 230000008901 benefit Effects 0.000 description 10
- 230000005540 biological transmission Effects 0.000 description 6
- 238000004364 calculation method Methods 0.000 description 5
- 238000010295 mobile communication Methods 0.000 description 5
- 230000004044 response Effects 0.000 description 5
- 238000007689 inspection Methods 0.000 description 4
- 239000013589 supplement Substances 0.000 description 4
- 238000012550 audit Methods 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 230000010354 integration Effects 0.000 description 3
- 238000000691 measurement method Methods 0.000 description 2
- 230000002123 temporal effect Effects 0.000 description 2
- 230000003044 adaptive effect Effects 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000005562 fading Methods 0.000 description 1
- 239000011152 fibreglass Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000008707 rearrangement Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000005303 weighing Methods 0.000 description 1
Images





Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W64/00—Locating users or terminals or network equipment for network management purposes, e.g. mobility management
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/14—Determining absolute distances from a plurality of spaced points of known location
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/12—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves by co-ordinating position lines of different shape, e.g. hyperbolic, circular, elliptical or radial
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Mobile Radio Communication Systems (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Description
(発明の背景)
発明の技術分野
本発明は、一般的には移動体無線通信の分野に関し、特に、移動体無線端末の地理的位置の決定に用いられる方法およびシステムに関する。
【0002】
関連技術の説明
移動体無線位置決定は、最近強い関心を引いている新分野であり、将来のセルラ移動体無線システムにおける位置決定能力を含むことが現在望まれている。軍事上の応用から公知である到着時間差(TDOA)位置決定方法は、移動体無線端末の位置決定のために成功裏に用いられてきた。代表的なTDOA位置決定システムは、到着時刻(TOA)の測定が移動局(MS)における「ダウンリンク」で行われる端末ベースのもの、または、ネットワークがTOA測定を無線基地局(BS)における「アップリンク」で行うネットワークベースのもの、でありうる。これらのTOA測定値は、次にTDOAパラメータを計算し、かつMSの位置を推定するために用いられる。
【0003】
セルラ移動体無線位置決定のために用いられてきた1つの位置決定システムは、トルーポジションTM(TruePositionTM)により市販されている。このシステムは、IS−54規格により動作する標準的なアナログ移動体無線端末の位置を決定するために用いられる。現在においては、これらの端末は、米国において用いられている移動体無線端末の大多数を構成する。トルーポジションシステムは、それ自身の受信する無線基地局を有し、セルラシステムとは無関係に動作せしめられ、同じ地域内のワイヤライン(「A」周波数帯)オペレータおよび非ワイヤライン(「B」周波数帯)オペレータにサービスしうる。そのようにして、これらのオペレータは、同じトルーポジション位置決定システムを共用しうる。要求された時は、トルーポジションシステムは、個々のセルラ移動体無線端末の位置情報を供給する。そうでない時は、位置決定システムは、通常セルラ移動体無線システムと通信しない。
【0004】
前述のように、トルーポジションシステムにより用いられる位置決定のTDOA方法は、公知の軍事上の応用に基づいている。本質的に、TDOA方法によれば、移動体無線端末により送信されたアップリンクメッセージの絶対的TOAは、少なくとも3つの固定無線BS内に登録される。この情報は、中央に位置するプロセッサにおいて処理され、このプロセッサは端末の位置を計算する。トルーポジションシステムにおけるアップリンクメッセージの登録は、主として(アナログ)アクセスチャネル(すなわち、IS−54規格のもとでの「逆方向制御チャネル」)上のアップリンク制御メッセージへ指示される。あきらかに、IS−54規格のもとにおいては、これらの制御メッセージのあるもの(例えば、登録メッセージおよびページ応答メッセージ)は、非暗号化コードでの端末識別を含み、それは、トルーポジションシステムが、関係の端末に対し責任のあるセルラネットワークオペレータからの情報を得る必要なく、特定の端末の位置を決定することを可能にする。IS−54規格は、(例えば、IS−136規格の場合におけるように)トラヒックチャネルにおける広い周波数帯上に分散したアクセスチャネルを用いるのではなく、わずかな、かなり狭い周波数帯に割当てられたアクセスチャネルの全てを用いることにより、位置決定タスクをさらに容易にする。
【0005】
しかし、主としてアクセスチャネルを使用することは、位置決定が空きモードにある移動体無線端末に対しさらに容易に行われることを意味する。そのわけは、アクセスチャネルは、(例えば、登録の時、またはページングの後に)空き端末によってのみ用いられるからである。もし移動端末の位置を、それが会話モードにある間に決定したければ、トルーポジションシステムは、音声チャネルトラッキングのためにわずかなトラヒックチャネルを利用するオプションを用いる。従って、例えば、もしハンドヘルド無線電話機により通話している時の動作中に警官の位置を決定したければ、ネットワークは、その無線電話機を、トルーポジションシステムによりモニタされるトラヒックチャネルへ、ハンドオフまたは新規割当てすることを要求される。
【0006】
スティルプ(Stilp)他に対する米国特許第5,327,144号は、(明らかにトルーポジションシステムに関連する)TDOAセルラ電話機位置システムを開示している。その特許によれば、移動体無線端末により逆方向(アナログ)制御チャネル上へ周期的に送信されるアップリンク信号(例えば、IS−54プロトコルにより15分毎に生じうるセルラ登録メッセージ)が、少なくとも3つの無線基地局により受信され、記録される。それぞれの信号のTOAは、(アップリンクメッセージに含まれる)送信端末の識別と共に、それぞれの無線基地局において記録される。この情報はプロセッサへ転送され、このプロセッサは、3つのTOAと、無線基地局の既知位置と、から得られるTDOAを用い、そのようにして識別された移動体無線端末の位置を計算する。
【0007】
(明らかにトルーポジションシステムにも関連する)スティルプ他に対するPCT出願第WO94/27161号は、移動体送信機の位置を決定するためのTDOAシステムを開示している。移動体無線端末により、周期的にではなく応答的に送信されるアップリンク信号(例えば、セルラページ受理通知メッセージ)は、(そのアップリンクメッセージ内に含まれる)送信端末の識別と共に、複数のBSにより受信され、TOAをタイムスタンプされ、また記録される。この情報はプロセッサへ転送され、このプロセッサは、そのTOAと、無線BSの既知位置とを用い、そのようにして識別された移動体無線端末の位置を計算する。
【0008】
上述の文書は、セルラ位置決定の分野におけるかなりの進歩を示しているが、なお解決されるべき多くの問題が残されている。例えば、上述のTDOA方法は、一般にIS−54システムにおけるアナログ音声チャネルへは適用されえない。そのわけは、音声チャネルの周波数は周波数計画に従って無線BSへ分配されるからである。もし所定の音声チャネル(周波数)が、所定のアクセスチャネルの代わりに位置決定測定のために用いられるべきであれば、ある無線BSは、音声チャネルをこれら所定の周波数に割当てえない。そのわけは、BSのコンバイナは、その所定の周波数を含まないかもしれない基地局特有の周波数に同調せしめられるからである。従って、これらのBSと通信する端末の位置は、それらの端末が会話モードで動作している時には、上述の方法によっては決定されえない。
【0009】
特に上述の位置決定方法が、あるトラヒックチャネルにおける会話モードにある移動体無線端末に適用される時の追加の問題は、その移動体無線端末の電力制御に関連する。もしその移動体端末がサービス無線基地局の近くにあれば、陸上システムは、低いアップリンク送信電力を要求する電力制御命令を、その移動体無線端末へ送る。TOAを測定するように命令された、もっと遠い無線基地局がその時受信する信号は、もし移動体無線端末からの距離がある限度を超えていれば、TOA測定を行い且つ端末識別を読取るのに十分な強度をもたない。
【0010】
上述の移動体端末の位置決定方法に関するさらにもう1つの問題は、それがIS−54システムにおけるディジタル音声チャネルに対して適用しえず、移動体端末が、複数の所定のアナログ音声チャネルのうちの1つのチャネルへハンドオーバされた後でなければ、位置決定方法が用いられえないことである。さらに、上述の位置決定方法は、(なかんずく)IS−136システムにおけるような純粋なディジタル規格のもとでは、適用が困難である。そのわけは、制御チャネルが、割当てられた周波数帯内の任意の周波数のものでありえ、位置決定要求を受信し終わる前に、あらかじめ全てのチャネル上の全てのトラヒックを記録することは不可能であるからである。さらに、移動体通信用ディジタルグローバルシステム(GSM)のような、あるセルラ移動体無線システムにおいては、トラヒックチャネルのために周波数ホッピングモードが用いられ、これが、上述の方法により移動体端末の位置を決定することを事実上不可能にする。
【0011】
結論として、任意のアップリンクトラヒックチャネル、または制御チャネル上の、かつ任意の現在および将来の移動体通信規格による、任意のセルラ移動体無線端末の位置を決定する方法への要求が存在している。
【0012】
(発明の要約)
本発明が取り組む1つの問題は、通常のディジタルおよびアナログトラヒックチャネル(例えば、音声チャネル)に対しアップリンクTDOA方法を適用するのであるが、トラヒックチャネル上において会話モードで動作しつつある移動体端末が、通常それらの識別をアップリンクへ送信しないこと、およびトラヒックチャネルが周波数ホッピングモードで用いられうること、を認識しつつ、任意のディジタルまたはアナログ移動体無線端末の地理的位置をどのようにして決定すべきか、ということである。
【0013】
本発明が取り組むもう1つの問題は、指向性アンテナ(例えば、アンテナアレイ)が無線基地局用として利用可能である時に、標準的なディジタルおよびアナログ移動体無線端末の地理的位置をどのようにして決定すべきか、すなわち、到着方向(DOA)測定により、アップリンクTDOA方法をどのようにして補足すべきか、ということである。
【0014】
本発明が取り組むさらにもう1つの問題は、会話モードで動作している移動体無線端末の地理的位置を、搬送周波数のTDMAタイムスロットを用いどのようにして決定すべきか、ということである。その場合、それらのタイムスロット内のバーストは、非サービス無線BSに到着する時に他のタイムスロット内のバーストとオーバラップしうる。そのわけは、タイムアラインメント(TA)システムの機能が、サービス無線BSにおいてのみそのようなオーバラップを避けるように設計されているからである。
【0015】
本発明が取り組むさらにもう1つの問題は、移動体無線端末の改善された位置決定を必要とするある地域において、測定の精度をどのようにして改善するか、ということである。例えば、精度に関する要求は、位置決定を必要とする移動体端末の環境(田舎の屋外、都会の屋内、など)に依存して変化しうる。
【0016】
本発明が取り組むさらにもう1つの問題は、受信される無線エネルギーに関する限りにおいて、どのようにして無線基地局により遠隔の移動体無線局から送信されたアップリンク信号のTOAを測定しうるようにするか、ということである。
【0017】
従って、本発明の目的は、非周波数ホッピングトラヒックチャネルが存在し、かつ周波数ホッピングトラヒックチャネルが存在しうる移動体無線システムの、任意のアナログまたはディジタルトラヒックチャネルにおいて、直接会話モードで動作している移動体無線端末の位置を決定するアップリンクTDOA方法および装置を提供することである。
【0018】
本発明のもう1つの目的は、TDOA測定を補足するために方向測定がシステムの固定部分において行われる移動体無線システムの、任意のアナログまたはディジタルトラヒックチャネルにおいて、直接会話モードで動作している移動体無線端末の位置を決定するアップリンクTDOA方法および装置を提供することである。
【0019】
本発明のさらにもう1つの目的は、受信されるバーストのオーバラップが回避されうる移動体無線システムの、任意のアナログまたはディジタルトラヒックチャネルにおいて、直接会話モードで動作している移動体無線端末の位置を決定するアップリンクTDOA方法および装置を提供することである。
【0020】
本発明のさらにもう1つの目的は、必要に応じ局所的に改善された精度が得られる、移動体無線システムの任意のアナログまたはディジタルトラヒックチャネルにおいて、直接会話モードで動作している移動体無線端末の位置を決定するアップリンクTDOA方法および装置を提供することである。
【0021】
(遠隔の無線基地局が位置決定に参加する場合を含め)基地局が、信号のTOAを決定するために十分な受信アップリンク信号エネルギーを供給される移動体無線システムの、任意のアナログまたはディジタルトラヒックチャネルにおいて、直接会話モードで動作している移動体無線端末の位置を決定するアップリンクTDOA方法および装置を提供することである。
【0022】
本発明によれば、以上の目的およびその他の目的は、位置決定機能を、移動体無線端末を扱う移動体無線システムの陸上ネットワーク内に統合することにより達せられる。特に、移動体端末の位置決定に必要なアップリンクTOA(およびオプションとしてのDOA)の測定は、要求があり次第、移動体無線システムの無線BSにおいて、送信機−受信機(TX−RX)の通常の機能が測定装置の機能により補足された改変受信機(ModRX)を用いて行われる。実施例においては、ModRXにおいてTX部分は用いられず、従って除外されうる。測定命令は、例えば、移動体サービス交換局(MSC)のようなネットワーク制御装置により、1つまたはそれ以上のBSへ送られ、それらの命令は、測定を行う無線チャネルを識別する。測定は行われるとネットワーク制御装置へ報告され、またそこから、(その特定の時刻における無線チャネルに関連する移動体端末の識別と共に)移動体無線端末の位置を計算するサービスノード(SN)内のプロセッサへ報告される。
【0023】
本発明の1つの実施例においては、IS−136規格に従って動作するセルラ移動体無線システムにおけるModRXは、トラヒックチャネルの識別用の(関連する周波数と、タイムスロット固有の同期ワードと、に対応する)チャネル番号を用い、指定されたアップリンクトラヒックチャネル上の信号のTOAを測定するようMSCにより命令される。この測定動作が完了すると、ModRXは、そのTOA測定値をトラヒックチャネル番号(CHN)と共にネットワーク制御装置(MSC)へ送り返す。ネットワーク制御装置は、ルックアップテーブルを用いて、CHNを、その時刻におけるトラヒックチャネル上で動作している移動体端末の識別(MS−ID)へ翻訳する。前もって、測定が命令された時に、MS−IDおよびCHNの情報が、セルラシステムにおいて得られる呼セットアップ記録からコピーされ、ルックアップテーブル内へ入力されている。TOA測定値は、ネットワーク制御装置により供給される関連する移動体端末識別と共に位置決定計算へ入力として供給され、この計算は、ネットワーク内のSNにおいて、3つの異なる無線基地局において同じ端末について行われた少なくとも3つの同時測定の結果を利用して行われる。ModRXは、該ModRXが測定を行うトラヒックチャネルにおけるディジタル情報に同期させられ、TOA測定は、(例えば、衛星に基づく全地球測位システム、すなわちGPS、またはある他の公知の絶対時間基準により与えられる)正確な時間基準に関して行われる。
【0024】
第1実施例のもう1つのバージョンにおいては、GPSにより与えられる絶対時間基準を、少なくとも1つの基準移動局により与えられる相対時間基準で置換することにより、改善された精度および柔軟性が実現されうる。
【0025】
本発明の第2実施例においては、上述の移動体端末位置の決定方法および装置が、DOA測定を行うModRXにより補足され、このDOA測定値は、上述のTOA測定値と同様にして報告される。DOA測定値は、SNにおける位置決定アルゴリズムへ入力パラメータとして供給される。もしTOAおよびDOAの測定値の双方が、位置決定アルゴリズムにおける使用のために得られるならば、(例えば、TOA距離の円と、DOAを表示する線との交点を用いて)あいまいさのない位置決定結果を得るために、無線チャネルの測定値を報告する無線BSは1つのみ必要となる。
【0026】
本発明の第3実施例においては、遠隔のBSが位置決定測定のために用いられなければならない環境において、ModRXにおいて行われるTOA測定が、まずハンドオーバを行った後に行われるので、同じ搬送波上の、測定されるトラヒックチャネルのタイムスロットに隣接するタイムスロットは、他の移動体接続により使用されない。上述のように、これは、近くに代わりのBSが得られない場合に、位置決定のために遠隔BSの使用することを可能にし、最初にハンドオーバを行わずに遠隔BSを使用すれば、妨害バーストのオーバラップを生ぜしめることになる。
【0027】
本発明の第4実施例においては、TOA測定を行うModRXは、その無線BSから遠くに位置しているが、なおその無線BSに接続されている。この実施例によれば、局所的な位置決定の精度は、追加のコストが必要な場合でも、わずかな追加のコストで改善されうる。
【0028】
第4実施例の1つのバージョンにおいては、固定接続(例えば、同軸ケーブル、ガラス繊維の光ケーブル、または導線)を経て近くの基地局に接続されたModRX装置により、改善された測定精度が実現される。今後「カスケード位置決定」と呼ばれる、この実施例の第2バージョンにおいては、移動体ModRX装置を自動車両(例えば、救急車、警察のパトロールカー、軍用車両、など)内に配置することにより、改善された測定精度が実現されうる。本発明の教示によれば、自動車両の位置の決定方法は、固定基地局において、自動車両内に置かれた移動局のためにTOA/DOA測定を行うことにより実施されうる。この同じ移動局は、好ましくは、やはりその自動車両内に配置された(ModRX)基地局に直接接続されたものとする。この移動局は、その自動車両内に配置された基地局のModRXにより行われたTOA/DOA測定を、セルラ移動体無線システム中へ報告する。そのModRXはGPS受信機を含むことができ、このGPS受信機は、セルラシステムのみを経ての、または、より良い精度を所望する場合にはGPSを経ての、その自動車両の位置の決定を可能にする。しかし、測定の報告は、セルラシステムを経て行われる。追加される可能性は、自動車両を、既知位置を有するいくつかの所定の駐車場の1つに駐車させ、その位置を手動で報告することである。
【0029】
本発明の第5実施例においては、サービス無線基地局が、移動体無線端末(MS)の極めて近くにある。TOA測定を、遠くのBS内のModRXにより行われるように命令する前に、移動体無線端末(MS)は、その送信電力を強制的に増加させられる。この増加は、ネットワーク制御装置が、MSに、測定中高電力で送信するように命令することにより、または、MSをもっと遠くのサービスBSへハンドオフすることにより、実現することができ、後者の場合もMSからの送信電力は高くなる。
【0030】
本発明の第6実施例においては、TOAを測定する無線BSのModRXは、信号メッセージについて信頼性のある測定を行いうる十分な信号エネルギーを受信しない。しかし、トラヒックチャネル上の可変情報の読取りは、本発明により行われるTOA測定に関連しないので、1つより多くのメッセージが受信され、従って、1つのメッセージより長い積分時間にわたり、非可変情報(例えば、同期ワード、CDMAコードパタ−ン、など)の受信エネルギーが蓄積され、これは、TOA測定を受けつつある信号のS/N比を改善する。
【0031】
本発明の第7実施例においては、TOAを測定する無線BSのModRXは、信頼性のある測定を行うための、妨害レベルを超える十分な信号エネルギーを受信しない。その遠隔のBS内のModRXによりTOA測定が行われるように命令する前に、移動体無線端末(MS)は、同じサービスBSにおける別のトラヒックチャネルへハンドオフ(BS内ハンドオフ)され、その場合新しいトラヒックチャネルは、TOA測定を行うその遠隔のBSにおける妨害の影響が小さいように選択される。
【0032】
本発明の1つの重要な技術的利点は、その位置決定方法が、関係する移動体無線端末が任意のアップリンクディジタル(またはディジタル化)情報を伝達する限り、または伝達せしめられうる限り、任意のアナログおよびディジタルシステムと、回線交換およびパケット交換トラヒックおよび制御チャネルと、へ適用可能であることである。そのわけは、ModRXが、任意の指定されたアップリンク無線チャネル上において、前もって既知であるディジタル情報(例えば、同期ワード)を、そのチャネル上のなんらかの端末識別情報または他の可変情報を読取る必要なく、受取るからである。
【0033】
本発明のもう1つの重要な技術的利点は、いくつかの一般に普及している移動体通信システム(例えば、エリクソン(Ericsson)のCMS88システム)が、ハンドオーバ前に「検査」に関連してアップリンク信号強度を測定する(すなわち、ターゲットBSにおげるアップリンク信号強度をチェックする)モジュールを有し、本発明の測定モジュールが、そのような測定モジュールを改変することにより得ることができ、それにより、位置決定に必要なプロシージャおよび信号プロトコルが、ハンドオーバ機能から容易に得られることである。
【0034】
本発明のさらにもう1つの重要な技術的利点は、本位置決定方法が、移動体端末が空きモードにある時と同様に、呼中においても適用されうることであり、そのわけは、要求が、(上述のように)関係する移動体端末がディジタル情報をアップリンクへ送ることができ、測定が行われつつある間、可変情報が読取られないことであるからである。この総合的能力は、例えば、警察活動中などの、ある重要な状況において重要でありうる。
【0035】
本発明のさらにもう1つの重要な技術的利点は、測定モジュールModRXを無線BSから遠くに設置し、それにより、多数の完全な無線BSを必要とすることなく、多くの異なる位置に使用可能な測定モジュールを有することにより、位置決定測定の局所的精度を改善しうることである。この技術的利点は、移動体測定モジュールModRXが、救助活動,警察活動、または軍事活動に参加する自動車両内に置かれている時には、さらに明らかになる。そのわけは、測定の正確さが最も必要とされる時に、測定精度が局所的に改善されるからである。
【0036】
本発明のもう1つの重要な技術的利点は、周波数ホッピングチャネルにおいて測定を行いうることである。そのわけは、ホッピングシーケンスについての情報が、移動体無線陸上ネットワークにおいて容易に使用しうるからである。
【0037】
本発明のさらにもう1つの重要な技術的利点は、それが、MSにおける送信電力を増加させることにより(セルラシステムにおける位置決定機能の統合により可能になる)、またはTOA測定を行うBSにおいて、受ける妨害が小さいトラヒックチャネルへのBS内ハンドオフによりMSをハンドオフすることにより(これも、セルラシステムにおける位置決定機能の統合により可能になる)、必要な時に無線BSにおける受信信号エネルギーの増加を、受信機におけるエネルギーを1つより多くのメッセージにわたり積分することにより可能にすることである(メッセージの内容が問題にならないので可能になる)。
【0038】
本発明のもう1つの重要な技術的利点は、移動局の位置決定において、GPSおよび全国無線送信機のような絶対時間基準の代わりに、少なくとも1つの基準移動局を用いるオプションである。GPS全国無線送信機の代わりに基準移動局を用いることの技術的利点は、基準移動局と、配置される移動体無線端末との間では、周波数が同じまたは類似しており、一方、GPS全国無線送信機と、移動局とに関連する周波数は、明らかに異なることから、さらに明らかとなる。
【0039】
本発明の方法および装置のさらに完全な理解は、添付図面と共に以下の詳細な説明を参照することにより得られる。
【0040】
(図面の詳細な説明)
本発明の実施例およびその利点は、図1から図7までを参照することにより最も良く理解され、これらの図の同じ部品および対応する部品に対しては、同じ番号が用いられている。
【0041】
本質的に、本発明は、移動体無線端末の位置決定のためのアップリンクTDOA方法を提供し、これは、実施例においては、IS−54、IS−136、およびパシフィックディジタルセルラ(PDC)規格により動作するエリクソンシステムにおけるハンドオフと共に適用される検査プロシージャのさらなる発展に基づくものである。ハンドオフ要求がMSCへ送られると、MSCは、ターゲットセル内の特定の基地局に、検査を行うように命令する。エリクソンシステムにおいては、そのようなモジュールは、IS−136規格のもとでは位置および検査モジュール(LVM)と呼ばれ、PDC規格のもとでは検査受信機(VRX)と呼ばれる。この機能の目的は、ターゲットセル内における移動体端末の存在を検査することである。検査モジュールは移動体端末に同調し、旧チャネル上における移動体端末の存在を検査する。この検査の結果は、MSCへ送られる。
【0042】
本発明によれば、BSにより行われる位置決定アップリンク測定は、時間的(例えば、TOA)測定と、角測定と、を含みうる。TOA測定は、好ましい測定方法を構成する。しかし、角測定は、特にもしBSが、移動体端末からの信号のDOAの推定を容易に可能にする適応アンテナ(アンテナアレイ)を備えているならば、TOA測定を補足するために用いられうる。移動体端末の位置は、1つのBSにおいて行われるTOAおよび/またはDOA測定から推定されうる。あるいは、移動体端末の位置を推定するために、複数のBSのTOAおよびDOA測定を組合わせることもできる。
【0043】
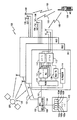
図1は、本発明の実施例による、統合位置決定機能を有するセルラ移動体無線システム100を示す概略ブロック図である。システム100は、複数の無線BS(代表的な3つが、BS1、BS2、BS3として示されている)。これらの無線基地局は異なるサイトに位置しており、通信リンク101を経て有線ネットワークに接続されている。この有線ネットワークは、さらに公衆電話交換網すなわちPSTN(明示的には示されていない)を経て、SN103に接続されている。接続104は、好ましくは中継接続を含む。MSC102は、チャネル番号(CHN)を移動体端末識別(MS−ID)に関連させるためのルックアップテーブル109を含む。
【0044】
SN103はプロセッサ103aを含み、プロセッサ103aはさらに、受信ユニット103bと、記憶ユニット103cと、送信ユニット103dと、第1および第2の計算ユニット(103e、103f)のそれぞれと、を含む。第1計算ユニット103eは、無線基地局によりアップリンク上で受信された信号のTDOAを計算し、その場合第1計算ユニット103eは、報告されたTOAを用いる。第2計算ユニット103fは、移動体無線端末の位置を、TDOA情報と、(オプションとして)利用可能な報告されたDOA情報と、を用い移動体無線端末の位置を計算する。記憶ユニット103cは、無線基地局の既知の地理的位置を保持する。受信ユニット103bおよび送信ユニット103dは、(例えば、公知の短メッセージサービスのメッセージのような短いテキストメッセージを用いて)位置決定情報を要求/受信する顧客との双方向通信を提供する。
【0045】
図1はまた、位置を決定されるべき移動体無線端末(MS)108をも示している。無線基地局BS1、BS2、およびBS3は、それぞれの該BSの2つのアンテナ106上に受信されるアップリンク無線接続105を経て、MS108のトラヒックチャネルを受信する。この2アンテナ機能は、無線トラヒックに対し、かつまた本発明により行われる位置決定測定に対し、空間ダイバーシチを提供する。それぞれの無線基地局(BS1、BS2、BS3)は、制御部110と、スプリッタ112を経て受信アンテナ106に、またコンバイナ113を経て送信アンテナ107に接続された複数のTXRX111と、を含む。さらに、それぞれの前記BSは、好ましくは、例えば、宇宙ベースGPS120のような正確な時間基準からの信号を受信する、時間基準ユニット114を含む。その時間基準信号は、時間基準ユニット114から連続的にModRXモジュール130へ結合せしめられる。
【0046】
本発明のBS(例えば、BS1)は、時間基準ユニット114と、制御部110と、を含み、制御部110は、BS内の、ModRXのみでなく、もっと多くのユニットにサービスしうる。好ましくは、ModRX130はBS内に配置されるが、そのようなModRXはまた、BSから遠くに配置された自立ユニットでもありえ、しかし、BSの制御部110および時間基準ユニット114には接続される。もしModRXがBS内に配置されれば、そのModRXは、BSの受信アンテナを共有しうる。しかし、もしModRXがBSから遠くに配置されれば、そのModRXは、それ自身の受信アンテナ106を含みうる。
【0047】
図2は、図1に示されているModRX130の詳細を示す概略ブロック図である。実施例においては、ModRXは、無線BSにおいてTOA測定を行う。あるBSにおいては、ModRXはまた、TOA測定を補足する公知のDOA測定装置207をも含みうる。
【0048】
ModRX130は、計量部201と、無線受信機部202とを含む。計量部201は、IS−54およびIS−136システムにおける使用のために3重化され(図2には、明示的に示さず)、フレームの3つの最高速タイムスロットを処理するようにされうる。逆に、無線受信機部202は、3重化された計量部201により共用されうる。もしModRX130が、周波数ホッピングシステム(例えば、GSM)において用いられるバージョンを含めば、制御部110は、好ましくは、周波数ホッピングシーケンスを受信周波数合成器211へ入力し、受信周波数合成器211は、位置決定が周波数ホッピングトラヒックチャネル上において行われうるようにする。無線受信機部202はまた、2つの受信アンテナ106に結合した、受信機212と、RF復調器213と、IF復調器214と、をも含む。GSMについてのさらなる詳細は、欧州電気通信標準化機構(ETSI)により標準化されたGSM技術仕様と、マイケル・ムーリ(Michel Mouly)およびマリー・バーナデット・ポーテット(Marie Bernadette Pautet)著の「移動体通信のためのGSMシステム(The GSM System for Mobile Communication)」と題する書籍(国際標準書籍番号(International Standard Book Number)2−9507190−0−7)と、に与えられている。
【0049】
図2において、計量部201は、時間基準ユニット114からの時間基準信号と、TOA測定を受ける記号検出器204からのアップリンク信号と、を受けるTOA計203を含む。記号検出器204は、等化器205(または、アナログチャネル用相関器)から入力信号を受ける。同期ワードおよびDVCC(ディジタル検査カラーコード)部206は、TOA測定を受ける無線チャネルを識別する番号を制御部110から受ける。例えば、IS−54またはIS−136システムにおいては、BSのクラスタ内のそれぞれのBSは、特定のDVCCと、それが搬送周波数の特定のタイムスロットに同期することを可能にする7つの異なる同期ワードと、を有する。この情報は、制御部110からDVCC部206へ入力され、制御部110はその情報をさらにMSC(102)から受ける。同期ワードおよびDVCC部206は、このチャネル情報を等化器205へ結合させ、この等化器が(好ましくは公知の相関方法を用いて)タイムスロットを見出せるようにする。オプションとして、もし関連する無線BSが、(2つより多いアンテナ106に対応する)アレイアンテナシステムを含むならば、計量部201は、制御部110のみに接続されたDOA計207を含みうる。DOA計207は制御部110から、そのようなBSにおける公知のビーム形成機能から得られる方向情報を要求して受ける。従って、DOA計207は、位置測定のために指定されたチャネルに関して得られる情報をリレーするのみである。DOA情報が得られる時は、それはSN内の位置決定アルゴリズムにおいて利用され、位置決定精度を改善し、または、関係する3つより少ないBSにより位置決定が行われるようにすることができる。例えば、単一無線基地局からのTOAおよびDOAのみが得られる時は、DOAにより与えられる直線と、TOA測定により与えられる円(その半径は、光速度に移動体端末からBSまでの信号の伝搬時間を乗じたものに等しい)との交点に、移動体端末の位置が決定されうる。
【0050】
図3は、本発明によるTOA測定を受ける、(IS−136規格のもとでの)逆方向(アップリンク)タイムスロットのためのフォーマット301を示す図である。28ビット同期ワードの異なる配置を示すために、順方向(ダウンリンク)タイムスロットフォーマット302も示されている。アップリンクにおいては、受信相関器回路(明示的には示されていない)によりタイムスロットを見出すために用いられる同期ワードは、タイムスロットの始めまたは終りから離して配置される。この配置の理由は、搬送周波数上の連続するタイムスロットのアップリンクタイミングが、異なる移動体無線端末により、同じ搬送波上の異なるタイムスロットを用いて与えられるからである。従って、アップリンクタイムスロットは、それらが異なる移動体無線端末から無線基地局へ到着する時、互いにオーバラップしうる危険がある。同期ワードを多少とも中央に配置すれば、そのようなオーバラップの機会は最小化される。この問題はダウンリンクにおいては存在しない。それにもかかわらず、そのようなオーバラップは、アップリンクにおいて起こりうるので、少なくとも同期ワードを、妨害を受けないように保護することが重要である。
【0051】
図4は、本発明によるTOA測定を受ける、IS−54規格のもとでの逆方向(アップリンク)音声チャネルメッセージストリームのためのフォーマット401を示す図である。絶対TOAは、メッセージ内の任意の合意された点(例えば、第1ワード同期402の終り)に関するものである。等化器205は時間ダイバーシチにより助けられ、メッセージ内のいくつかのワード同期を検査し、時間的な公称遅延403により補正することにより、メッセージ内の合意された点を見出すことができる。この機能は、例えば、メッセージ内の合意された点402がフェージングにより妨害された時に役立つ。アナログ音声チャネルは、ディジタル時間基準を含まないので、移動体端末をして、(例えば、ダウンリンク上の監査命令に応答して)音声チャネル上へアップリンクメッセージを送らしめることが必要である。
【0052】
図5は、本発明による、図1に示されているシステム100と共に用いられうる位置決定方法500を示すフローチャートである。図1および図5を参照すると、SN103へ位置決定要求が来た時(ステップ501)、ステップ503において、位置決定されるべき移動体端末108が会話モードにあるかどうかについての決定が、中継線104を経てMSC102へ、その移動体端末への呼をセットアップするよう要求することにより行われる。もし移動体端末108が空き状態にあれば、ステップ507において呼がセットアップされる。もしステップ503において、移動体端末がすでに会話モードにあれば、ステップ505において、その使用されているトラヒックチャネルがディジタルトラヒックチャネルであるかどうかについて決定が行われる。もしディジタルトラヒックチャネルでなければ(すなわち、そのトラヒックチャネルがアナログであれば)、MSC102から移動体端末108へ監査メッセージが送られ、その移動体端末がアップリンク応答を(例えば、図4に示されているフォーマットに基づく)ディジタル形式で受けるようにされる。そうではなく、ステップ505において、もしトラヒックチャネルがディジタルであれば、監査メッセージは不必要となる。ステップ509において、MSC102は、いずれの(例えば、3つの)BSが位置決定プロセスに参加すべきかを決定し、接続101を経て、BS1、BS2、およびBS3のような、少なくとも3つの指定された無線基地局からのTOA測定を要求し、関係するトラヒックチャネル番号を指示する。3つのBSのそれぞれにおける制御部110は、ModRX130に、指定されたチャネル上の移動体無線端末の位置を決定するように要求する。ステップ511において、3つのBSは、公知のTOA測定方法により測定を行い、得られた測定情報を、関連するチャネル番号(CHN)と共にMSC102へ報告する。ステップ513において、MSC102は、該MSC内のルックアップテーブル109を用い、そのCHNを移動体無線端末の識別(MS−ID)へ翻訳する。ステップ515において、MSCは、無線基地局BS1、BS2、およびBS3からの測定値を、MS−IDと共に、SN103へ送る。ステップ517において、SN103は、三角測量アルゴリズムにより移動体端末108の位置を計算する。その結果得られた位置情報は、関係する移動体端末の位置を要求した位置決定システムの顧客へ伝達される。
【0053】
本発明の異なる実施例における、わずかに改変された図5のフローダイアグラムは、ステップ509においてTOA測定を行う前に、ハンドオフステップを含み、それにより、遠隔のBSが位置決定に参加する時に、隣接するタイムスロットのオーバラップと、TOA測定の妨害とを回避しうる。
【0054】
本発明のさらにもう1つの実施例においては、もう1つのわずかに改変された図5のフローダイアグラムは、無線基地局が該基地局に接続された複数の(例えば、いくつかの)ModRXを有する時、その無線基地局から1つよりも多くのTOA測定を命令するステップを含みうるが、それらのModRXは異なる遠隔位置に設置される。
【0055】
本発明のさらにもう1つの実施例においては、もう1つのわずかに改変された図5のフローダイアグラムは、MSの無線カバレージ内に、DOAを決定しうるBSが存在する時、ステップ509において、図示されているように「≧3BSからのチャネル上においてTOAを測定する」代わりに、「1つより多くの、または1つのBSからのチャネル上においてTOAおよびDOAを測定する」、方法の置換を含みうる。その場合、ステップ511からステップ517までもまた、DOA測定の処理を含む。
【0056】
本発明のさらにもう1つの実施例においては、もう1つのわずかに改変された図5のフローダイアグラムは、もしステップ509において、指示されたトラヒックチャネルが、あるBSにおいてTOA測定を行うためには余りにも弱いと決定されたならば、位置決定ステップ503ないし509を繰返すステップを含みうる。この場合には、ステップ503を繰返す前に、もっと遠いサービスBSへのBS間ハンドオフを行うことにより、または、測定を行うBSにおいて受ける妨害が小さいトラヒックチャネルへBS内ハンドオフを行うことにより、または、好ましくはMSに送信電力を増加させるように直接命令することにより、MSの送信電力を増加させる(またはS/N比を改善する)ステップが追加される。
【0057】
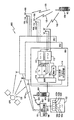
図6は、図1に示されている実施例による位置決定機能を有するセルラ移動体無線システム600を示す概略ブロック図であるが、「カスケード位置決定」の新概念を実行するように改変されている。図1および図6を参照すると、図1に示し、また図1に関連して上述した要素に加えて、システム600は、少なくとも1つのMS601を含む。MS601は、好ましくは、付属ユニット602を経てBS1に有線接続される。MS(端末)601は、無線エアインタフェース604を経、無線基地局BS4(603)を経て、MSC102と通信する。図6に示されている実施例においては、無線基地局BS4(603)および無線エアインタフェース604(移動体接続)は、BS1とMSC102との間の、(図1に示されている)固定接続101を置換している。従って、図6に示されている代表的な移動体接続のような移動体接続(例えば、BS4およびエアインタフェース604)の使用は、移動車両(例えば、救急車、警察のパトロールカー、軍用車両、など)内にBS1(またはBS2またはBS3)を置くことを可能にし、1つまたはそれ以上のBS(例えば、BS1、BS2、BS3、など)を重要な領域の比較的近く(例えば、MS108を携帯する遭難者の比較的近く)へ移動させることにより、位置決定の精度を動的に改善することができる。もし重要な領域内に固定BSが1つしかなければ、自動車両の、またMS108の位置を決定することが困難となりうる。図6に示されているように、本発明によれば、車両は、時間基準ユニット114内に、GPSから制御される「時間基準」に加えて「GPS受信機」をも含みうる。従って、車両は、内部GPS受信機の使用が有利である場合には、MS601を経てその位置を報告しうる。
【0058】
動作上、図5に関連して以上に示され且つ説明された方法は、移動局601の位置、従ってBS(例えば、BS1、BS2、またはBS3)を運搬する自動車両の位置を決定し且つ報告するためにも用いられうる。好ましくは、図6に示されている実施例における信号妨害を最小化するために、移動体無線BS(例えば、BS1、BS2、またはBS3)により行われるTOA/DOA測定は、自動車両の位置を決定しつつある固定無線基地局BS4(603)のTOA/DOA測定、または移動体接続(エアインタフェース604およびBS4(603))を経て送信される報告と、オーバラップしないようにする。
【0059】
図7は、図1に示されている実施例によるセルラ移動体無線システム700を示す概略ブロック図であるが、GPS120および時間基準114(図1)の代わりに、少なくとも1つの基準移動局(MSR)709を用いるように改変されている。図1および図7を参照すると、図1に示し、また図1に関連して上述した要素に加えて、システム700は、無線基地局BS1、BS2、およびBS3対し既知位置を有するMSR709を含む。基地局BS1、BS2、およびBS3は、MSR709から送信されるアップリンク無線接続705を受信する動作を行いうる。さらに詳述すると、MSR709は、それぞれの基地局BS1、BS2、およびBS3へ相対時間基準すなわち「時間ブリップ」を送信し、この「時間ブリップ」は、例えば、特定のフレームの始めから成りうる。
【0060】
相対時間基準すなわち「時間ブリップ」の受信に応答して、基地局BS1、BS2、およびBS3内のそれぞれのModRX130は、「時間ブリップ」の対応するTOAを決定する。次に、それぞれのTOAは、MSR709と、それぞれの基地局BS1、BS2、またはBS3と、の間の既知距離を考慮して補正される。
【0061】
その後、それぞれのModRX130は、MS108に関連するTOAを決定し、その場合、そのTOAは、対応する「時間ブリップ」に関して測定される。(例えば、MSRおよびMSの)測定されたTOAは、次にサービスノード103へ送信され、サービスノード103は、公知の双曲線位置決定アルゴリズムを実行してMS108の地理的位置を確認する。
【0062】
さらに、MSR709はまた、MSR709の位置を知っている1つの基地局(例えば、BS2)内に置かれうる。そのような状況においては、MS108の位置を決定するために要求される必要なTOA測定の数を得るために、システム700内に第2MSR(図示せず)が必要となる。そのわけは、それぞれの基地局BS1、BS2、およびBS3は、必要なTOAを決定するために、MSR709から少なくとも1つの「時間ブリップ」を受けなければならないからである。MS108の位置を決定しうるために必要なTOAが測定されるように、第2MSR(図示せず)を、他の基地局の1つ(例えば、BS1またはBS3)に置くことができる。
【0063】
本発明の方法および装置の実施例を、添付図面に示し且つ以上の詳細な説明において説明してきたが、本発明は、開示した実施例へ制限されるものではなく、特許請求の範囲に記載され且つ定められている本発明の精神から逸脱することなく、多くの再配置、改変、および置換が可能であることを理解すべきである。
【図面の簡単な説明】
【図1】 本発明の実施例による、統合位置決定機能を有するセルラ移動体無線システムを示す概略ブロック図である。
【図2】 図1に示されている改変受信機(ModRX)の詳細を示す概略ブロック図である。
【図3】 本発明によるTOA測定を行う基礎をなすIS−136規格のもとでの逆方向(アップリンク)タイムスロットのためのフォーマットを示す。
【図4】 本発明によるTOA測定を行う基礎をなすIS−54規格のもとでの逆方向(アップリンク)音声チャネルメッセージストリームのためのフォーマットを示す。
【図5】 本発明による、図1に示されているシステムに関連して用いられうる位置決定方法を示すフローチャートである。
【図6】 「カスケード位置決定」の新概念を実行するように改変された、図1に示されている実施例による統合位置決定機能を有するセルラ移動体無線システムを示す概略ブロック図である。
【図7】 GPSおよび時間基準ユニットの代わりに基準移動局を用いるように改変された、図1に示されている実施例によるセルラ移動体無線システムを示す概略ブロック図である。
Claims (3)
- 第2移動体無線端末(108)の位置決定の基準点として利用され得る移動体ユニットであって、
前記移動体ユニットは、該移動体ユニットに含まれる第1移動体無線端末(601)を介してネットワーク制御装置(102)と通信する第1の無線基地局(BS1)を含み、前記第1の無線基地局は、
時間基準ユニット(114)と少なくとも1つの受信アンテナとに接続した測定装置であって、
前記時間基準ユニットに結合しており、複数のトラフィックチャネルにおいてTOAを測定する第1手段と、
測定されるべきチャネルからのデジタルアップリンク情報を前記第1手段へ伝達し、TOAを決定するために前記測定されるべきトラフィックチャネルと該トラフィックチャネルを識別する情報との相関を用いる第2手段と、
少なくとも1つの復調器を含む、少なくとも1つの無線受信機と、
特定のトラフィックチャネルにおける位置決定測定を可能とする周波数を前記少なくとも1つの復調器に結合させる動作を行いうる受信周波数合成器と、
周波数ホッピングトラフィックチャネルにおけるTOA測定を可能とする周波数ホッピングシーケンスを受信し、入力する手段と、
を含む前記測定装置と、
指定されたチャネルに在る前記第2移動体無線端末(108)により送信された信号のアップリンク到着時間を測定する指示を受信するための手段と、
前記第1移動体無線端末(601)の位置を決定し、報告する手段と、
前記第2移動体無線端末(108)により送信された前記信号のアップリンク到着時間を測定し、報告する手段と、
を含み、
前記第1手段は、前記ネットワーク制御装置(102)と通信し且つ少なくとも第2の無線基地局のTOA計と同期する動作を行うことができることを特徴とする移動体ユニット。 - 前記位置を決定し、報告する手段に、GPS受信機が含まれることを特徴とする請求項1に記載の移動体ユニット。
- 前記位置を決定し、報告する手段は、前記第1移動体無線端末の位置に関するあらかじめ決められた知識を有し、該位置をユーザ指示に従って報告することを特徴とする請求項1に記載の移動体ユニット。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US08/917,577 US5952969A (en) | 1997-08-18 | 1997-08-18 | Method and system for determining the position of mobile radio terminals |
| US08/996,937 US6031490A (en) | 1997-08-18 | 1997-12-23 | Method and system for determining the position of mobile radio terminals |
| US08/917,577 | 1997-12-23 | ||
| US08/996,937 | 1997-12-23 | ||
| PCT/SE1998/001487 WO1999009778A1 (en) | 1997-08-18 | 1998-08-18 | Method and system for determining the position of mobile radio terminals |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009137698A Division JP2009284495A (ja) | 1997-08-18 | 2009-06-08 | 移動無線端末の位置を決定する方法およびシステム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2001516194A JP2001516194A (ja) | 2001-09-25 |
| JP2001516194A5 JP2001516194A5 (ja) | 2006-01-05 |
| JP4421770B2 true JP4421770B2 (ja) | 2010-02-24 |
Family
ID=27129725
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000510307A Expired - Lifetime JP4421770B2 (ja) | 1997-08-18 | 1998-08-18 | 移動体無線端末の位置を決定する方法およびシステム |
Country Status (9)
| Country | Link |
|---|---|
| EP (1) | EP1005774B1 (ja) |
| JP (1) | JP4421770B2 (ja) |
| CN (1) | CN1158890C (ja) |
| AU (1) | AU743242B2 (ja) |
| BR (1) | BR9811225A (ja) |
| CA (1) | CA2299351C (ja) |
| DE (1) | DE69837389T2 (ja) |
| NZ (1) | NZ502624A (ja) |
| WO (1) | WO1999009778A1 (ja) |
Families Citing this family (55)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6243588B1 (en) * | 1998-03-10 | 2001-06-05 | Ericsson Inc. | Mobile positioning method for a portable communications device using shortened repetitive bursts |
| US6522887B2 (en) * | 1998-07-27 | 2003-02-18 | Telefonaktiebolaget Lm Ericsson (Publ) | Identifying starting time for making time of arrival measurements |
| EP1101385B1 (en) * | 1998-07-27 | 2008-03-19 | Telefonaktiebolaget LM Ericsson (publ) | Method for measuring the time of arrival of a radio signal, and apparatus therefor. |
| US6188354B1 (en) * | 1999-03-29 | 2001-02-13 | Qualcomm Incorporated | Method and apparatus for determining the location of a remote station in a CDMA communication network |
| GB9912724D0 (en) * | 1999-06-01 | 1999-08-04 | Cambridge Positioning Sys Ltd | Radio positioning system |
| US6603976B1 (en) * | 1999-08-03 | 2003-08-05 | Ericsson, Inc. | Architecture for TOA positioning with LMU control functionality in BSC |
| SE9903038L (sv) * | 1999-08-27 | 2001-02-28 | Ericsson Telefon Ab L M | Förfaranden och anordningar i ett telekommunikationssystem |
| US6300905B1 (en) * | 1999-10-05 | 2001-10-09 | Lucent Technologies Inc. | Location finding using a single base station in CDMA/TDMA systems |
| US7203158B2 (en) | 2000-12-06 | 2007-04-10 | Matsushita Electric Industrial Co., Ltd. | OFDM signal transmission system, portable terminal, and e-commerce system |
| JP4726306B2 (ja) * | 2001-01-31 | 2011-07-20 | パナソニック株式会社 | 無線通信システム、移動端末局及び方位決定方法 |
| FR2824207B1 (fr) * | 2001-04-27 | 2005-04-15 | Thomson Csf | Procede et dispositif de localisation d'un mobile au sein d'un reseau de communication |
| JP2003078947A (ja) * | 2001-06-18 | 2003-03-14 | Nec Corp | 移動局位置検出方式 |
| DE10159086A1 (de) * | 2001-12-01 | 2003-06-12 | Alcatel Sa | Verfahren zur Bestimmung der Entfernung zwischen einer Mobilstation und einer Basisstation |
| JP4143313B2 (ja) * | 2002-03-05 | 2008-09-03 | Necインフロンティア株式会社 | 移動訪問サービスシステム |
| JP2005069743A (ja) * | 2003-08-21 | 2005-03-17 | Cyber Creative Institute Co Ltd | 測位装置 |
| JP3678733B2 (ja) * | 2003-10-03 | 2005-08-03 | 株式会社エヌ・ティ・ティ・ドコモ | 携帯通信端末及び位置情報提供方法 |
| US7412246B2 (en) * | 2003-10-06 | 2008-08-12 | Symbol Technologies, Inc. | Method and system for improved wlan location |
| EP1908317B1 (en) * | 2005-07-26 | 2013-11-13 | Telefonaktiebolaget LM Ericsson (Publ) | Scheduling for uplink and downlink time of arrival positioning |
| CN101283616B (zh) * | 2005-10-07 | 2011-04-06 | 艾利森电话股份有限公司 | 适应性增强的小区标识定位 |
| US8351942B2 (en) | 2007-03-21 | 2013-01-08 | Alcatel Lucent | Signaling method to support geo-location emergency services |
| CN101720440B (zh) * | 2007-04-12 | 2013-07-10 | Lm爱立信电话有限公司 | 确定无线终端在通信网络中的位置 |
| JP5141384B2 (ja) * | 2008-06-05 | 2013-02-13 | 日本電気株式会社 | 圏外エリア検出システム、携帯端末、圏外情報管理サーバ及び圏外エリア検出方法。 |
| US7864045B2 (en) * | 2008-09-12 | 2011-01-04 | Roundtrip Llc | Locator inventory system |
| US8160609B2 (en) | 2008-11-26 | 2012-04-17 | Andrew Llc | System and method for multiple range estimation location |
| CN101520502B (zh) * | 2009-03-24 | 2011-09-14 | 中国航空无线电电子研究所 | 对无线传感器网络移动节点的跟踪定位方法 |
| KR101703860B1 (ko) * | 2009-05-05 | 2017-02-22 | 엘지전자 주식회사 | 무선 이동 통신 시스템에 있어서, 사용자 기기의 위치를 결정하기 위한 방법 및 이를 수행하기 위한 장치 |
| CN101931857B (zh) * | 2009-06-19 | 2013-04-24 | 华为技术有限公司 | 定位参考信号发送和接收方法、装置及系统 |
| US9590733B2 (en) | 2009-07-24 | 2017-03-07 | Corning Optical Communications LLC | Location tracking using fiber optic array cables and related systems and methods |
| EP2282574B1 (en) * | 2009-08-07 | 2017-08-09 | Intel Deutschland GmbH | Arrangement and method for estimating network traffic based on angle of arrival determination in a cellular network |
| WO2011123336A1 (en) | 2010-03-31 | 2011-10-06 | Corning Cable Systems Llc | Localization services in optical fiber-based distributed communications components and systems, and related methods |
| US8570914B2 (en) | 2010-08-09 | 2013-10-29 | Corning Cable Systems Llc | Apparatuses, systems, and methods for determining location of a mobile device(s) in a distributed antenna system(s) |
| CN103298015B (zh) * | 2012-02-23 | 2019-11-05 | 南京中兴软件有限责任公司 | 基站的检测方法及系统和硬仿真设备 |
| US9781553B2 (en) | 2012-04-24 | 2017-10-03 | Corning Optical Communications LLC | Location based services in a distributed communication system, and related components and methods |
| US8954261B2 (en) | 2012-05-03 | 2015-02-10 | GM Global Technology Operations LLC | Autonomous vehicle positioning system for misbehavior detection |
| WO2013181247A1 (en) | 2012-05-29 | 2013-12-05 | Corning Cable Systems Llc | Ultrasound-based localization of client devices with inertial navigation supplement in distributed communication systems and related devices and methods |
| JP5752643B2 (ja) * | 2012-06-15 | 2015-07-22 | 株式会社東芝 | 無線管理装置、通信システム、通信方法、及び通信プログラム |
| CN103517206A (zh) * | 2012-06-25 | 2014-01-15 | 大唐联诚信息系统技术有限公司 | 一种用于移动设备定位的方法及装置 |
| US8977280B2 (en) | 2012-12-20 | 2015-03-10 | Telefonaktiebolaget L M Ericsson (Publ) | Node and method for determining link adaptation parameters |
| US9158864B2 (en) | 2012-12-21 | 2015-10-13 | Corning Optical Communications Wireless Ltd | Systems, methods, and devices for documenting a location of installed equipment |
| CN103167524B (zh) * | 2013-01-25 | 2015-11-25 | 中国矿业大学(北京) | 一种基于toa技术的煤矿井下人员定位系统定位精度评价方法 |
| EP3186986A4 (en) * | 2014-08-29 | 2018-04-11 | Nokia Technologies Oy | A system for output of audio and/or visual content |
| FR3030772B1 (fr) * | 2014-12-19 | 2020-11-06 | Amesys | Methode de localisation d'un emetteur de position inconnue avec des recepteurs synchronises de positions connues |
| CN105047003B (zh) * | 2015-07-10 | 2018-06-01 | 北京四象网讯科技有限公司 | 一种反向寻车及正向寻找车位的方法及系统 |
| CN105372689B (zh) * | 2015-12-14 | 2018-06-08 | 广州广电计量检测股份有限公司 | 基于卫星的定位方法和系统 |
| US9648580B1 (en) | 2016-03-23 | 2017-05-09 | Corning Optical Communications Wireless Ltd | Identifying remote units in a wireless distribution system (WDS) based on assigned unique temporal delay patterns |
| US10015769B1 (en) * | 2017-03-16 | 2018-07-03 | Lonprox Corporation | Systems and methods for indoor positioning using wireless positioning nodes |
| CN111034244B (zh) * | 2017-06-14 | 2024-07-16 | 弗劳恩霍夫应用研究促进协会 | 用于改善位置估计的装置、系统和方法 |
| KR102157309B1 (ko) * | 2018-04-20 | 2020-09-18 | 한양대학교 산학협력단 | 이동 단말기의 위치측정시스템 |
| EP3783973A4 (en) | 2018-04-20 | 2022-03-16 | IUCF-HYU (Industry-University Cooperation Foundation Hanyang University) | POSITION MEASUREMENT SYSTEM FOR MOBILE TERMINAL |
| KR102157898B1 (ko) * | 2018-04-27 | 2020-09-21 | 한양대학교 산학협력단 | 이동통신 단말기의 위치측정을 위한 링크 신호 설정 방법 |
| EP3690472B1 (en) | 2019-01-30 | 2021-10-20 | Rohde & Schwarz GmbH & Co. KG | Method as well as device for timeslot-wise detection of at least one radio signal |
| CN110133583B (zh) * | 2019-04-23 | 2022-03-18 | 四川九洲电器集团有限责任公司 | 基于离散时间驱动的信号toa测量方法和装置 |
| IT201900024000A1 (it) * | 2019-12-13 | 2021-06-13 | Telecom Italia Spa | Metodo e sistema per sfruttare connessioni ad onde millimetriche |
| IT202000011518A1 (it) * | 2020-05-19 | 2021-11-19 | Enjoy Smart Application Srl | Sistema e metodo di localizzazione indoor/outdoor di dispositivi mobili. |
| CN113033466B (zh) * | 2021-04-13 | 2022-11-15 | 山东大学 | 一种人脸识别方法及装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5317323A (en) * | 1993-03-05 | 1994-05-31 | E-Systems, Inc. | Passive high accuracy geolocation system and method |
| US5327144A (en) * | 1993-05-07 | 1994-07-05 | Associated Rt, Inc. | Cellular telephone location system |
| DE4409178A1 (de) * | 1994-03-17 | 1995-09-21 | Siemens Ag | Verfahren und Anordnung zum Ermitteln der Position von Mobilstationen in einem Mobilfunksystem |
| SE512065C2 (sv) * | 1995-02-16 | 2000-01-24 | Europolitan Ab | Förfarande och anordning för positionsbestämning av en mobilstation i ett cellulärt mobiltelefonsystem |
| US5844522A (en) * | 1995-10-13 | 1998-12-01 | Trackmobile, Inc. | Mobile telephone location system and method |
-
1998
- 1998-08-18 WO PCT/SE1998/001487 patent/WO1999009778A1/en active IP Right Grant
- 1998-08-18 NZ NZ502624A patent/NZ502624A/en not_active IP Right Cessation
- 1998-08-18 AU AU88936/98A patent/AU743242B2/en not_active Expired
- 1998-08-18 BR BR9811225-2A patent/BR9811225A/pt not_active Application Discontinuation
- 1998-08-18 CN CNB98810315XA patent/CN1158890C/zh not_active Expired - Lifetime
- 1998-08-18 CA CA002299351A patent/CA2299351C/en not_active Expired - Lifetime
- 1998-08-18 JP JP2000510307A patent/JP4421770B2/ja not_active Expired - Lifetime
- 1998-08-18 DE DE69837389T patent/DE69837389T2/de not_active Expired - Lifetime
- 1998-08-18 EP EP98940733A patent/EP1005774B1/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| EP1005774A1 (en) | 2000-06-07 |
| DE69837389T2 (de) | 2007-12-20 |
| WO1999009778A1 (en) | 1999-02-25 |
| EP1005774B1 (en) | 2007-03-21 |
| CN1276956A (zh) | 2000-12-13 |
| DE69837389D1 (de) | 2007-05-03 |
| AU743242B2 (en) | 2002-01-24 |
| CA2299351A1 (en) | 1999-02-25 |
| CA2299351C (en) | 2009-04-14 |
| CN1158890C (zh) | 2004-07-21 |
| JP2001516194A (ja) | 2001-09-25 |
| BR9811225A (pt) | 2000-09-05 |
| NZ502624A (en) | 2002-02-01 |
| AU8893698A (en) | 1999-03-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4421770B2 (ja) | 移動体無線端末の位置を決定する方法およびシステム | |
| US6031490A (en) | Method and system for determining the position of mobile radio terminals | |
| US6347228B1 (en) | Location apparatus and method in a mobile telecommunications system | |
| JP2001517801A (ja) | セルラ移動体端末の位置を決定する方法と装置 | |
| US6055434A (en) | Method and system for locating a mobile station within a mobile telecommunications network | |
| CN102405418B (zh) | 网络自主无线定位系统 | |
| AU738573B2 (en) | A method for determining timing differences between radio transmitters and a radio network incorporating the same | |
| TWI493994B (zh) | 用於無線電存取系統內之位置定位的系統及方法 | |
| US20050272439A1 (en) | Mobile localization in gsm networks | |
| JP3765984B2 (ja) | Cdma通信システムにおける移動加入者局の位置特定方法およびシステム | |
| US6654362B1 (en) | Use of location in handoff in wireless communication systems | |
| JPH11275642A (ja) | 移動通信装置の位置判定方法、機器および移動通信装置 | |
| JP2002524967A (ja) | 通信システム | |
| CN113596936A (zh) | 一种卫星通信系统中波束的切换方法、装置、设备及介质 | |
| WO1999037109A2 (en) | A cellular radio system providing at least two measuring methods for locating a mobile station | |
| RU2335097C2 (ru) | Способ работы системы мобильной связи, система мобильной связи, мобильная станция и устройство для определения подгруппы смежных ячеек радиосвязи системы мобильной связи | |
| US6862447B1 (en) | Method of making downlink operational measurements in a wireless communication system | |
| ES2207012T3 (es) | Metodo y sistema para determinar la posicion de un terminal de radio movil. | |
| WO2000051364A2 (en) | Method for antenna gain acquisition in a cellular system | |
| GB2316823A (en) | Loxcating cellular radio transmitter | |
| MXPA00001378A (en) | Method and system for determining the position of mobile radio terminals | |
| WO2024196437A1 (en) | Methods, apparatuses and systems for intelligent reflection surface installed user equipment positioning | |
| JP3752515B6 (ja) | 無線送信器とこれを組み込んだ無線ネットワークとの間のタイミング差を決定する方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050608 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050608 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050706 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20060323 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20060629 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20071004 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071009 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20080107 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20080115 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080829 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20081119 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20081127 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081219 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090202 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090608 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20090622 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20090805 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090915 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090929 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091106 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091203 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121211 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131211 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |