以下に本発明の実施の形態を説明するが、本明細書に記載の発明と、発明の実施の形態との対応関係を例示すると、次のようになる。この記載は、請求項に記載されている発明をサポートする実施の形態が本明細書に記載されていることを確認するためのものである。従って、発明の実施の形態中には記載されているが、発明に対応するものとして、ここには記載されていない実施の形態があったとしても、そのことは、その実施の形態が、その発明に対応するものではないことを意味するものではない。逆に、実施の形態が発明に対応するものとしてここに記載されていたとしても、そのことは、その実施の形態が、その発明以外の発明には対応しないものであることを意味するものでもない。
さらに、この記載は、本明細書に記載されている発明の全てを意味するものではない。換言すれば、この記載は、本明細書に記載されている発明であって、この出願では請求されていない発明の存在、すなわち、将来、分割出願されたり、補正により追加されたりする発明の存在を否定するものではない。
本発明においては、撮像装置(例えば、図3の撮像装置50)の光学素子(例えば、図3のフォーカスレンズ61やウォブリングレンズ62)を駆動させて被写体を撮像する際のフォーカス位置を調整する駆動部(例えば、図3のAF駆動部51)の制御に関する処理を実行する制御装置(例えば、図3のAF制御部53)が提供される。この制御装置では、撮像装置により撮像される撮像画像を構成する画素の輝度値の積分値を算出する積分値算出手段(例えば、図4のフィールド内輝度積分値算出部131)と、第1の時間範囲に撮像された撮像画像について算出された積分値と、第1の時間範囲とは異なる第2の時間範囲に撮像された撮像画像について算出された積分値との変化の割合を表す積分変化量を算出する積分変化量算出手段(例えば、図4の区間別輝度積分平均値算出部133乃至正規化部136)と、安定モードまたは不安定モードに設定されるモードに対応し、積分変化量と比較されるモード変更用閾値を調整する閾値調整手段(例えば、図4の起動条件調整部84)と、モードが安定モードに設定されている場合、積分変化量が安定モード用に調整されたモード変更用閾値よりも大きいときには、モードを安定モードから不安定モードに変更し、モードが不安定モードに設定されている場合、積分変化量が不安定モード用に調整されたモード変更用閾値よりも小さいときには、モードを不安定モードから安定モードに変更するモード変更手段(例えば、モード更新部145)と、モードが不安定モードから安定モードに変更されたことに対応して、駆動部を制御してフォーカス位置を制御するフォーカス位置制御処理を実行する実行手段(例えば、図3のAF制御処理部83)と、フォーカス位置制御処理の実行中に撮像された複数の撮像画像毎に、撮像画像を構成する画素のうち、飽和した輝度値を有する画素の個数である飽和輝度数を算出する飽和輝度数算出手段(例えば、図5の飽和輝度数算出部151)と、複数の撮像画像における、飽和輝度数の変化の割合を表す飽和輝度数変化量を算出する飽和輝度数変化量算出手段(例えば、図5の閾値選択部155)とを備え、閾値調整手段(例えば、図5の閾値更新部156)は、モードが安定モードに設定されている場合、飽和輝度数変化量が閾値調整用閾値未満であるときには、安定モード用のモード変更用閾値を第1の値に調整し、飽和輝度数変化量が閾値調整用閾値よりも大きいときには、安定モード用のモード変更用閾値を第1の値よりも大きな第2の値に調整する。
本発明においては、撮像装置(例えば、図3の撮像装置50)の光学素子(例えば、図3のフォーカスレンズ61やウォブリングレンズ62)を駆動させて被写体を撮像する際のフォーカス位置を調整する駆動部(例えば、図3のAF駆動部51)の制御に関する処理を実行する制御装置(例えば、図3のAF制御部53)の制御方法が提供される。この制御方法においては、撮像装置により撮像される撮像画像を構成する画素の輝度値の積分値を算出する積分値算出ステップ(例えば、図14のステップS21)と、第1の時間範囲に撮像された撮像画像について算出された積分値と、第1の時間範囲とは異なる第2の時間範囲に撮像された撮像画像について算出された積分値との変化の割合を表す積分変化量を算出する積分変化量算出ステップ(例えば、図14のステップS22乃至ステップS24)と、安定モードまたは不安定モードに設定されるモードに対応し、積分変化量と比較されるモード変更用閾値を調整する閾値調整ステップと、モードが安定モードに設定されている場合、積分変化量が安定モード用に調整されたモード変更用閾値よりも大きいときには、モードを安定モードから不安定モードに変更し、モードが不安定モードに設定されている場合、積分変化量が不安定モード用に調整されたモード変更用閾値よりも小さいときには、モードを不安定モードから安定モードに変更するモード変更ステップ(例えば、図15のステップS44)と、モードが不安定モードから安定モードに変更されたことに対応して、駆動部を制御してフォーカス位置を制御するフォーカス位置制御処理を実行する実行ステップ(例えば、図13のステップS4)と、フォーカス位置制御処理の実行中に撮像された複数の撮像画像毎に、撮像画像を構成する画素のうち、飽和した輝度値を有する画素の個数である飽和輝度数を算出する飽和輝度数算出ステップ(例えば、図17のステップS81)と、複数の撮像画像における、飽和輝度数の変化の割合を表す飽和輝度数変化量を算出する飽和輝度数変化量算出ステップ(例えば、図17のステップS85)とを含み、閾値調整ステップ(例えば、図17のステップS86乃至ステップS89)は、モードが安定モードに設定されている場合、飽和輝度数変化量が閾値調整用閾値未満であるときには、安定モード用のモード変更用閾値を第1の値に調整し、飽和輝度数変化量が閾値調整用閾値よりも大きいときには、安定モード用のモード変更用閾値を第1の値よりも大きな第2の値に調整する。
本発明のプログラムにおいても、各ステップが対応する実施の形態(但し一例)は、本発明の制御方法と同様である。
以下、本発明の実施の形態について図を参照して説明する。
図3は、本発明を適用した撮像装置の一実施形態に係る構成例を示す図である。
図3において、撮像装置50は、AF(Auto Focus)駆動部51、画像処理部52、およびAF制御部53を有しており、被写体を撮像し、動画または静止画の画像データを得る装置である。撮像装置50は、得られた画像データを記録媒体に記録したり、外部に出力したりする。なお、図3においては、撮像装置50の構成の内、本発明に関わる部分のみを示している。
AF駆動部51は、フォーカスレンズ61、ウォブリングレンズ62、レンズ駆動部63、駆動制御部64、センサ65、およびスイッチ(SW)66を有しており、AF制御部53の制御に基づいて、光学系を駆動させ、画像処理部52に取り込まれる光のフォーカス位置調整処理を行う。
フォーカスレンズ61は、画像処理部52に入射する光の光軸方向に駆動し、その光のフォーカス位置(得られる撮影画像のフォーカス位置)を制御する。ウォブリングレンズ62は、画像処理部52に入射する光の光軸方向に微小に振動(ウォブリング)し、撮影画像のフォーカス位置を微小にずらす。このウォブリングレンズ62は、焦点調整処理(フォーカス処理)中におけるフォーカスレンズ61の動かす向きを決定するのに利用される。なお、このフォーカスレンズ61とウォブリングレンズ62は、1組のレンズにより実現する(フォーカスレンズ61をウォブリングレンズ62としてウォブリング動作させる)ようにしてもよい。
レンズ駆動部63は、駆動制御部64より供給される制御情報に基づいて、フォーカスレンズ61およびウォブリングレンズ62の位置や動作を制御することによりフォーカス位置を制御する(フォーカス位置を制御するための動作を行わせる)。駆動制御部64は、後述するようにAF制御部53のAF制御処理部83とシリアルバスで接続されており、AF制御処理部83より供給されるフォーカス制御指令やウォブリング制御指令等の制御情報に基づいて、レンズ駆動部63にフォーカスレンズ61およびウォブリングレンズ62の駆動に関する制御情報を供給する。例えば、駆動制御部64は、レンズ駆動部63に対して、制御情報を供給し、フォーカスレンズ61の位置を移動するように指示したり、ウォブリングレンズ62のウォブリング動作を開始させたりする。
また、駆動制御部64は、センサ65より供給されるアイリス値やフォーカス位置に関する情報を、シリアルバスを介して、AF制御処理部83に供給する。さらに、駆動制御部64は、スイッチ(SW)66の状態に応じて動作が制御される。例えば、スイッチ66がオン状態の場合のみ駆動制御部64は、上述した制御処理や通信処理を行い、スイッチ66がオフ状態の場合、駆動制御部64は、休止状態となり各処理を実行しない。
センサ65は、フォーカス位置、ズーム位置(焦点距離)、およびアイリス値等を測定するセンサであり、測定したそれらの情報を、駆動制御部64を介してAF制御処理部83に供給する。スイッチ(SW)66は、AF処理を行うか否かをユーザが制御するためのスイッチであり、その状態を駆動制御部64に通知する。
画像処理部52は、撮像装置50に入射される光から電気信号の画像信号を生成する処理部であり、CCD(Charge Coupled Devices)71、増幅部72、および信号処理部73を有している。
CCD71は、フォトダイオード等の光電変換素子を有するCCDを利用した撮像素子であり、フォーカスレンズ61およびウォブリングレンズ62を介して入射される入射光を光電変換し、入射光量に対応する電荷を蓄積すると、それを吐き出すことにより電気信号の画像信号を得る。CCD71は、その画像信号を増幅部72に供給する。増幅部72は、CDS回路(Correlated Double Sampling circuit)、AGC回路(Automatic Gain Control circuit)、およびA/D(Analog / Digital)変換回路等を含み、CCD71より供給される画像信号のリセットノイズを除去したり、画像信号を増幅したり、アナログ信号の画像信号をデジタル信号に変換したりした後、そのデジタルの画像信号を信号処理部73に供給する。
信号処理部73は、供給された画像信号に対してAE(Auto Exposure)処理やAWB(Auto White Balance)処理や、γ補正等の画像処理等を施した後、その画像信号を後段に出力するとともに、AF制御部53の評価値算出部81、AF起動制御部82、および起動条件調整部84に供給する。また、信号処理部73は、画像信号の水平同期信号や垂直同期信号、並びにシステムクロック信号等の制御用同期信号を、評価値算出部81、AF起動制御部82、および起動条件調整部84に供給する。
AF制御部53は、画像処理部52より供給される画像信号等に基づいて、AF駆動部51を制御し、AF処理の制御に関する処理を行う。AF制御部53は、評価値算出部81、AF起動制御部82、AF制御処理部83、および起動条件調整部84を有している。
評価値算出部81は、画像処理部52の信号処理部73より供給される画像信号や同期信号、並びにAF制御処理部83より供給される設定データ等に基づいて、取り込み画像(画像信号)の「ぼけ」具合を評価する評価値を算出する。評価値算出部81は、算出した評価値をAF制御処理部83に供給する。
AF起動制御部82は、信号処理部73より供給される画像信号や同期信号に基づいて、AF処理の起動に関する制御処理を行い、その制御結果をAF制御処理部83に供給する。AF制御処理部83は、AF起動制御部82の制御に基づいて、AF処理を開始し、評価値算出部81より供給される評価値に基づいて、AF処理を実行し、シリアルバスを介して制御情報を駆動制御部64に供給する。また、AF制御処理部83は、評価値の算出に関する設定データを生成し、その設定データを評価値算出部81に供給する。さらに、AF制御処理部83は、シリアルバスを介して、駆動制御部64よりフォーカス位置やアイリス値等のセンサ情報を取得する。また、AF制御処理部83は、AF処理の制御を行う際に、最初に、起動条件調整部84にAFの起動条件の調整処理を実行させる。
起動条件調整部84は、AF制御処理部83より供給される起動条件調整処理の開始指示を取得すると、信号処理部73より供給される画像信号や同期信号に基づいて、AF起動制御部82によるAF起動制御に用いられるAF処理の起動条件を調整する処理を行う。そして、起動条件調整部84は、その調整された起動条件をAF起動制御部82に供給し、AF起動制御において使用させる。
また、AF制御部53は、バス90、ROM(Read Only Memory)91、入力部92、出力部93、記憶部94、通信部95、およびドライブ96をさらに有している。起動条件調整部84には、バス90が接続され、そのバス90を介して、ROM91乃至ドライブ96が接続される。
ROM91は、読み出し専用の記憶媒体を有しており、起動条件調整部84において実行されるプログラムやデータが予め記憶されている。ROM91に記憶されているプログラムやデータは、起動条件調整部84により、バス90を介して必要に応じて読み出される。入力部92は、スイッチやボタン等の入力デバイスを有しており、例えばユーザにより入力された指示情報等を受け付け、それらを、バス90を介して起動条件調整部84に供給する。出力部93は、LED(Light Emitting Diode)ディスプレイ、LCD(Liquid Crystal Display)、または有機EL(Electro Luminescence)ディスプレイ等よりなる表示部や、スピーカ等よりなる音声出力部を有しており、起動条件調整部84よりバス90を介して供給された情報を表示したり出力したりする。
記憶部94は、ハードディスクや半導体メモリ等を有し、起動条件調整部84により実行されるプログラムやデータが記憶されたり、起動条件調整部84より供給されるデータ等を記憶したりする。通信部95は、例えば、モデム、LAN(Local Area Network)アダプタ、USB(Universal Serial Bus)インタフェース、IEEE(Institute of Electrical and Electronic Engineers)1394インタフェース、SCSI(Small Computer System Interface)、またはIEEE802.11xアダプタ等を有し、所定の通信規格に基づいたインタフェース処理を行い、ネットワークを介して他の装置と通信を行い、例えば、他の装置より情報を受信し、それを起動条件調整部84に供給したり、起動条件調整部84からの情報を他の装置に送信したりする。
ドライブ96は、磁気ディスク、光ディスク、光磁気ディスク、或いは半導体メモリなどのリムーバブルメディア97が適宜装着される読み出し書き込み処理部である。ドライブ96は、例えば、装着されたリムーバブルメディア97からプログラムやデータを読み出し、それを、必要に応じて記憶部94にインストールさせたり、起動条件調整部84に供給したりする。また、ドライブ96は、例えば、バス90を介して起動条件調整部84より取得したプログラムやデータを、装着されているリムーバブルメディア97に記録する。
起動条件調整部84が実行する処理をソフトウエアにより実行させる場合には、そのソフトウエアを構成するプログラムが、ネットワークや記録媒体からインストールされる。
この記録媒体は、例えば、装置本体とは別に、ユーザにプログラムを配信するために配布される、プログラムが記録されている磁気ディスク(フレキシブルディスクを含む)、光ディスク(CD-ROM(Compact Disk-Read Only Memory),DVD(Digital Versatile Disk)を含む)、光磁気ディスク(MD(Mini-Disk)(登録商標)を含む)、もしくは半導体メモリなどよりなるリムーバブルメディア97により構成されるだけでなく、装置本体に予め組み込まれた状態でユーザに配信される、プログラムが記録されているROM91や、記憶部94に含まれるハードディスクや半導体メモリ等で構成される。
次に、動作について説明する。
撮影が開始されると、画像処理部52のCCD71は、点線矢印101に示されるような光軸でAF駆動部51のフォーカスレンズ61およびウォブリングレンズ62を介して入射された光を光電変換し、電気信号の画像情報(画像信号)を得る。そしてCCD71は、矢印102のように、その画像信号を増幅部72に供給する。増幅部72は、その画像信号を所定の方法で増幅させると、その増幅済みの画像信号を矢印103のように信号処理部73に供給する。信号処理部73は、供給された画像信号に対して画像処理を施すなどした後、それを、矢印104Aに示されるように図示せぬ後段に出力するとともに、矢印104B乃至矢印104Dに示されるようにAF制御部53の評価値算出部81、AF起動制御部82、および起動条件調整部84に供給する。また、信号処理部73は、矢印105A乃至矢印105Cに示されるように、同期信号を評価値算出部81、AF起動制御部82、および起動条件調整部84に供給する。
AF起動制御部82は、信号処理部73より供給される画像信号(取り込み画像の内容)に基づいてAF処理(ワンショットAF処理)の起動に関する制御処理を行う。詳細については後述するが、AF起動制御部82は画像信号の輝度値に基づいて、AF処理を行うか否かを判定し、起動条件調整部84に調整される所定の条件が満たされる場合、矢印107のようにAF制御処理部83に対してAF処理の起動を指示する。
AF処理の起動が指示されると、AF制御処理部83は、両矢印106のように評価値算出部81と連携してAF処理の制御に関する処理を行う。つまり、評価値算出部81は、AF制御処理部83より供給される設定データ等に基づいて、信号処理部73より供給される画像信号に対応する取り込み画像の「ぼけ」具合を評価する評価値を所定の算出方法で算出する。例えば、評価値は、フレーム画像の一部の画像領域内(評価枠内)におけるコントラストの大きさを示す値であり、その評価枠内の高周波成分の合計値等に基づいて算出される。評価値算出部81は、このような評価値を算出すると、それをAF制御処理部83に供給する。
AF制御処理部83は、その供給された評価値と、矢印110Bのようにシリアルバスを介して駆動制御部64より供給されたフォーカス位置やアイリス値等のセンサ情報に基づいて、例えばウォブリング動作や、山登り判定による最適なフォーカス位置検索等のAF処理の具体的な動作を制御する。このような制御情報は、矢印110Aのようにシリアルバスを介して駆動制御部64に供給される。また、AF制御処理部83は、AF制御処理を開始すると、その開始したという情報を、矢印108のように起動条件調整部84に供給する。
AF制御処理部83よりAF制御処理の開始が通知されると、起動条件調整部84は、AF処理の起動条件(閾値)を設定し、矢印109に示されるように、その起動条件(閾値)の情報をAF制御処理部83に供給し、セットさせる。
駆動制御部64は、センサ65より矢印111のようにフォーカス位置やアイリス値等のセンサ情報を取得し、シリアルバスを介して、そのセンサ情報を、矢印110BのようにAF制御処理部83に供給する。また、駆動制御部64は、SW66より矢印112のようにAF処理の設定に関するユーザ指示を受け付け、その指示に基づいて、矢印110Aのようにシリアルバスを介してAF制御処理83より供給される制御情報を受け付け、その制御情報に基づいた処理を行い、矢印113のように、レンズ位置等を指示するレンズ駆動制御情報をレンズ駆動部63に供給する。レンズ駆動部63は、そのレンズ駆動制御情報に基づいて、矢印114のようにフォーカスレンズ61を駆動させたり、矢印115のようにウォブリングレンズ62を駆動させたりする。
撮像装置50においては、このようにAF処理が制御される。
図4は、AF制御部53のAF起動制御部82の詳細な構成例を示すブロック図である。
図4において、AF起動制御部82は、相対角度変化量算出部121、モード変化検出部122、およびAF起動指示出力部123を有している。
相対角度変化量算出部121は、被写体と撮像装置50の相対角度(被写体と撮影方向の相対関係)が1区間(単位時間)当たりにどれくらい変化したかという変化量(相対角度変化量p0)を求める処理部であり、フィールド内輝度積分値算出部131、領域設定部132、区間別輝度積分平均値算出部133、区間別輝度積分平均値保持部134、差分値算出部135、および正規化部136を有している。
フィールド内輝度積分値算出部131は、フィールド画像(プログレッシブ画像であればフレーム画像)毎に、各画素の輝度値(y)を積分(合計)し、輝度積分値(フィールド内輝度積分値ynow_w5_f0)を算出する。そのとき、フィールド内輝度積分値算出部131は、フィールド画像の、領域設定部132において設定される領域内の画素の輝度積分値をフィールド内輝度積分値として算出する。フィールド内輝度積分値算出部131は、算出したフィールド内輝度積分値ynow_w5_f0を区間別輝度積分平均値算出部133に供給する。
領域設定部132は、フィールド内輝度積分値算出部131がフィールド内輝度積分値ynow_w5_f0を算出する領域を設定する。つまり、フィールド内輝度積分値ynow_w5_f0は、撮影画枠の全体または一部よりなる予め定められた範囲の画素の輝度値の合計値(積分値)である。
区間別輝度積分平均値算出部133は、フィールド内輝度積分値算出部131より供給されるフィールド単位の輝度積分値であるフィールド内輝度積分値ynow_w5_f0について、所定の時間(区間)単位(例えば、Nフィールド毎(Nは自然数))でその平均値(区間別輝度積分平均値yadd_w5_f0)を算出し、その区間別輝度積分平均値(算出途中の値を含む)を区間別輝度積分平均値保持部134に供給し、保持させる。1区間の平均値yadd_w5_f0を算出すると、区間別輝度積分平均値算出部133は、その値yadd_w5_f0を区間別輝度積分平均値保持部134に供給し、保持させるとともに差分値算出部135にも供給する。
なお、区間別輝度積分平均値yadd_w5_f0は、最新の区間(Nフィールド分)のフィールド内輝度積分値ynow_w5_f0の平均値である。つまり、区間別輝度積分平均値yadd_w5_f0は、現在のフィールドからNフィールド前のフィールドまでの各フィールドに対応するフィールド内輝度積分値ynow_w5_f0の平均値である。なお、1区間前の区間別輝度積分平均値yadd_w5_f1は、N+1フィールド前のフィールドから2Nフィールド前のフィールド前の各フィールドに対応するフィールド内輝度積分値ynow_w5_f0の平均値である。
従って、区間別輝度積分平均値保持部134は、最新の区間別輝度積分平均値yadd_w5_f0が算出されると(1区間分の平均値の算出が終了すると)、それまで保持していた1区間前の区間別輝度積分平均値yadd_w5_f1を削除し、それまで保持していた区間別輝度積分平均値yadd_w5_f0を、1区間前の区間別輝度積分平均値yadd_w5_f1に変更し、最新の区間別輝度積分平均値yadd_w5_f0を保持する。なお、区間別輝度積分平均値保持部134に保持されているフィールド内輝度積分値ynow_w5_f0と、算出途中の区間別輝度積分平均値yadd_w5_f0は、フィールド単位で更新される。
差分値算出部135は、このように算出された最新の区間別輝度積分平均値yadd_w5_f0と、区間別輝度積分平均値保持部134より取得した以前(1つ前の区間)の区間別輝度積分平均値yadd_w5_f1との差分値(yadd_w5_f0−yadd_w5_f1)を算出し、その算出結果と、最新のフィールド内輝度積分値ynow_w5_f0を正規化部136に供給する。
正規化部136は、差分値算出部135より供給された差分値を、最新のフィールド内輝度積分値ynow_w5_f0と1区間のフィールド数Nで正規化し、その正規化された値、すなわち、輝度積分値の変化の割合を、相対角度変化量(p0)として、モード変化検出部122のモード判別部141に供給する。
つまり、相対角度変化量p0は、以下の式(1)により求めることができる。
モード変化検出部122は、相対角度変化量算出部121において算出された相対角度変化量(p0)に基づいて、撮影画像の内容の変化の様子、つまり変化のモードが変化したか否か(モード変化)を検出する処理部であり、モード判別部141、モードフラグ142、閾値保持部143、更新確認部144、モード更新部145、およびモード変化パターン判定部146を有している。
モード判別部141は、相対角度変化量算出部121の正規化部136より供給される相対角度変化量に基づいて、現在のモードを判定する。ここでモードとは、撮影画像の内容の変化の様子をその程度によって状態として分けたものである。ここでは安定モードと不安定モードの2つのモードが存在する。要するに、モード判別部141は、相対角度変化量(p0)が大きいか小さいかによって、被写体が撮影装置50の撮影角度に対して大きく動いている(不安定モードである)か否(安定モードである)かを判別する。モード判別部141は、モードフラグ142を参照し、1つ前の区間のモードを特定すると、閾値保持部143よりそのモードに対応する閾値を取得する。そしてモード判別部141は、その閾値を用いて、撮影角度変化量から現在の区間のモードを判別する。モード判別部141は、そのモードの判別結果と、モードフラグ142より読み出した1つ前の区間のモードとを更新確認部144に供給する。
モードフラグ142は、モード判別部141により判別されたモードが設定される。すなわち、モードフラグ142には、安定モードであるか不安定モードであるかを示す情報(フラグ)がセットされる。閾値保持部143は、モード判別部141がモードを判別する際に用いる閾値(モード毎に設定される閾値αとβ)を保持する。なお、この閾値保持部143に保持される閾値は、起動条件調整部84により設定された値である。
更新確認部144は、モード判別部141より供給される情報に基づいてモードが更新されたか否かを判定し、その判定結果と、モード判別部141において判別された現在の区間のモードの情報を、モード更新部145およびモード変化パターン判別部146に供給する。
モード更新部145は、更新確認部144よりモードが更新されたと通知されると、モードフラグ142の値を更新し、新たなモードを示す値をセットする。例えば、モードフラグ142に安定モードを示す値がセットされている場合、モード更新部145は、その値を「不安定モードを示す値」に更新する。また、例えば、モードフラグ142に不安定モードを示す値がセットされている場合、モード更新部145は、その値を「安定モードを示す値」に更新する。
モード変化パターン判定部146は、更新確認部144において確認された更新がどのような更新であったか、すなわちモード変化のパターンを判定する。つまり、モード変化パターン判定部146は、モードが安定モードから不安定モードに移行したのか、不安定モードから安定モードに移行したのかを判定し、その判定結果をAF起動指示出力部123に供給する。
AF起動指示出力部123は、モード変化検出部122のモード変化パターン判定部146の判定結果に基づいて、AF起動指示をAF制御処理部83に対して出力する。つまり、AF起動指示出力部123は、モード変化パターン判定部146が、モードが不安定モードから安定モードに移行したと判定した場合のみ、AF処理を開始させる制御情報であるAF起動指示をAF制御処理部83に供給する。
以上のように、AF起動制御部82においては、相対角度変化量算出部121がAF処理の起動を制御するパラメータとして、カメラと被写体の相対角度の変化量を算出し、モード変化検出部122が、その変化量のモード変化パターンを特定し、AF起動指示出力部123がそのモード変化パターンに基づいて、AF制御処理部83にAF処理の起動指示を出力する。
図5は、図3のAF制御部53の起動条件調整部84の詳細な構成例を示すブロック図である。
図5において、起動条件調整部84は、AF起動制御部82の閾値保持部143に保持されるモード判別用の閾値の値を撮影状況(撮影画像内容)に応じて制御(調整)する処理部である。
一般的に、フォトダイオード等の光電変換素子は、正常に量子化可能な輝度レベルに限界があり、例えば、被写体の光量が強すぎる場合、その撮影画像の輝度値は飽和し、所謂「白飛び」してしまう。より具体的に説明すると、例えば、被写体に照明等の光量の多い物体が含まれるような場合、撮影画像のその部分の画素の輝度値が飽和する恐れがある。そのような場合、仮に、実際の照明(被写体)では場所(部分)によって明暗があったとしても、撮影画像においては、その明るい部分も暗い部分も輝度値が量子化レベルの上限に達してしまい、いずれも「真白」として表現され、明暗の区別ができない(所謂「白飛び」)。
詳細については後述するが、このような輝度値が飽和した画素を含む撮影画像の場合、その画像の内容によっては、AF処理等により発生するフォーカス位置の変化によって、撮影画像のフィールド内輝度積分値が大幅に変化し、AF処理を不要に起動させてしまう恐れがある。そこで、起動条件調整部84は、撮影画像の内容によって(撮影画像に含まれる飽和輝度に基づいて)起動条件を調整する。
そのような処理を行うため、起動条件調整部84は、飽和輝度数算出部151、飽和輝度数履歴保持部152、飽和輝度数最大値検索部153、飽和輝度数最小値検索部154、閾値選択部155、および閾値更新部156を有している。
飽和輝度数算出部151は、AF制御処理部83よりAF処理開始を指示されると、信号処理部73より供給される画像信号と同期信号に基づいて、各画素の輝度値を参照することにより、フィールド(プログレッシブ画像であればフレーム)内に含まれる輝度値が飽和した画素の数である飽和輝度数を算出する。つまり、飽和輝度数算出部151は、AF処理におけるウォブリング動作中の撮影画像について、各フィールドの飽和輝度数を算出する。
飽和輝度数算出部151は、飽和輝度数を算出すると、順次、それを飽和輝度数履歴保持部152に供給し、保持させる。飽和輝度数算出部151は、このようにMフィールド分(Mは予め定められた任意の自然数)の飽和輝度数を算出すると、飽和輝度数の算出処理を終了し、そのことを飽和輝度数最大値検索部153に通知する。
飽和輝度数履歴保持部152は、RAM等の半導体メモリやハードディスク等に代表される記憶素子(記録媒体)により構成され、それによって所定のサイズの記憶領域を有している。飽和輝度数履歴保持部152は、その記憶領域に、飽和輝度数算出部151より供給される飽和輝度数を、最大Mフィールド分、履歴として保持する。
例えば、図5において、飽和輝度数履歴保持部152は、最新のフィールド画像の飽和輝度数である現フィールド飽和輝度数161−1、現フィールドより1つ前のフィールド画像の飽和輝度数である1前フィールド飽和輝度数161−2、現フィールドより2つ前のフィールド画像の飽和輝度数である2前フィールド飽和輝度数161−3、・・・、現フィールドより(M−1)前のフィールド画像の飽和輝度数である(M−1)前フィールド飽和輝度数161−M(つまり、最新のMフィールド分の飽和輝度数)を、履歴として保持している。
飽和輝度数履歴保持部152は、供給された最新の飽和輝度数を、Mフィールド分保持するまで、順次保持していく。そして、飽和輝度数履歴保持部152は、飽和輝度数をMフィールド分保持した後は、最新の飽和輝度数が供給される度に、保持している中で最も古い履歴((M−1)前フィールド飽和輝度数161−M)を削除し、供給された最新の(フィールドの)飽和輝度数を履歴として保持する(保持する飽和輝度数の履歴を更新する)。
飽和輝度数最大値検索部153は、飽和輝度数算出部151より算出処理の終了を通知されると、飽和輝度数履歴保持部152に保持されている飽和輝度数の履歴を参照し、その中から飽和輝度数が最大値の履歴を検索し、その最大値の情報を取得する。飽和輝度数最大値検索部153は、その最大値の情報を閾値選択部155に供給し、その最大値検索処理の終了を飽和輝度数最小値検索部154に通知する。
飽和輝度数最小値検索部154は、飽和輝度数最大値検索部153より最大値検索処理の終了を通知されると、飽和輝度数履歴保持部152に保持されている飽和輝度数の履歴を参照し、その中から飽和輝度数が最小値の履歴を検索し、その最小値の情報を取得する。飽和輝度数最小値検索部154は、その最小値の情報を閾値選択部155に供給するとともに、その最小値検索処理の終了を通知する。
閾値選択部155は、飽和輝度数最小値検索部154より最小値検索処理の終了を通知されると、飽和輝度数最大値検索部153より供給された飽和輝度数の最大値(最新のMフィールド分における飽和輝度数の最大値)と、飽和輝度数最小値検索部154より供給された飽和輝度数の最小値(最新のMフィールド分における飽和輝度数の最小値)に基づいて、相対角度変化量のモード判別に用いられる閾値(閾値保持部143に保持される閾値)を選択する処理を行う。具体的には、閾値選択部155は、以下の式(2)で表される判別式を用いて、ウォブリング中の飽和輝度数の変動の様子を判別し、その判別結果(ウォブリング中の飽和輝度数の変動の様子)に応じて最適な閾値を選択する。
(最新のMフィールド分における飽和輝度数の最大値)/{(最新のMフィールド分における飽和輝度数の最小値)+1}>γ ・・・(2)
式(2)において、γは任意の定数である。また、式(2)の分母において、最新のMフィールド分における飽和輝度数の最小値に値「1」を加算しているのは、最小値が「0」である場合に分母の値が「0」になることを避けるためである。ここでは、通常の場合において無視できる値の例として「1」を加算している。式(2)の判別式において、事実上無視できる値であれば「1」以外の値を加算するようにしてももちろんよい。例えば、γの値を設定する際に、この加算値による影響を考慮するようにしてもよい。
閾値選択部155は、以上の式(2)の判別式が満たされる場合、つまり、ウォブリング中において飽和輝度数の変化量(変化幅)が大きい場合、撮影画像に後述するような特殊な被写体である棒状飽和輝度被写体が存在すると判定し、安定モードから不安定モードへの遷移を判別する際の閾値として、棒状飽和輝度被写体用の閾値(α×3)、つまり、通常の被写体に対する閾値αの3倍の値を選択する。式(2)の判別式が満たされない場合、つまり、ウォブリング中において飽和輝度数の変化量(変化幅)が小さい場合、閾値選択部155は、撮影画像には、通常の被写体しか存在しないと判定し、安定モードから不安定モードへの遷移を判別する際の閾値として、通常の被写体に対する閾値αを選択する。
棒状飽和輝度被写体の詳細については後述する。また、安定モードから不安定モードへの遷移を判別する際の閾値αについても後述する。なお、ここで、棒状飽和輝度被写体用の閾値を、通常の被写体(棒状飽和輝度被写体でない被写体)に対する閾値αの3倍としたが、この値はあくまでも一例であり、通常の被写体に対する閾値より大きな値であれば(安定モードから不安定モードへの遷移の条件を厳しくするものであれば)、これに限らず、どのような値であってもよい。
以上のように閾値を選択すると閾値選択部155は、その選択した閾値の情報を閾値更新部156に供給する。閾値更新部156は、閾値選択部155より供給された値を用いて、閾値保持部143に保持されている、安定モードから不安定モードへの遷移を判別する際の閾値を更新する。
次に、AF起動制御部82による相対角度変化量のモード遷移判定の様子について説明する。最初に、撮影画像に棒状飽和輝度被写体が含まれない場合(通常の被写体のみの場合)について説明する。図6は、その場合のモード遷移判定とAF起動の関係を説明する模式図である。
図6に示されるように、被写体の撮影装置50の撮影角度に対する動き(相対角度変化量)のモードには、安定モード171と不安定モード172の2つのモードが存在する。
例えば、1つ前の区間におけるモードが安定モード171であったとする。その場合、モードフラグ142には安定モード171を示す値がセットされる。モード判別部141は、そのモードフラグ142を参照し、安定モード171であると判定すると、閾値保持部143より、安定モード用の閾値αを取得する。なお、ここでは、撮影画像に棒状飽和輝度被写体が含まれない(前回のAF処理のウォブリングにおいて、撮影画像に棒状飽和輝度被写体が含まれないと判定された)ので、安定モード用の閾値として「α」がセットされている。
そして、モード判別部141は、相対角度変化量算出部121の正規化部136より供給された相対角度変化量(正規化された差分値)の絶対値(ABS(Absolute)(p0))をその閾値αと比較する。仮に、相対角度変化量の絶対値が閾値α以下であるとすると、モード判別部141は、新たな区間のモードも安定モード171であると判別する。つまり、この区間と1つ前の区間は両方とも安定モード171であるので、矢印181に示されるようにモード変化は発生しない。
仮に、相対角度変化量の絶対値(ABS(p0))が閾値αより大きい場合、モード判別部141は、新たな区間のモードを不安定モード172であると判別する。つまり、1つ前の区間において安定モード171であったのが、モード変化が発生し、現在の新たなモードは不安定モード172に遷移する。その際、更新確認部144はモード遷移のパターンが矢印182により示される、安定モード171から不安定モード172への遷移であることを確認し、モード更新部145は、モードフラグ142の値を更新する。
つまりモードフラグ142には、不安定モード172を示す値がセットされるので、モード判別部141は、そのモードフラグ142を参照し、不安定モード172であると判定すると、閾値保持部143より、不安定モード用の閾値βを取得する。そして、モード判別部141は、相対角度変化量算出部121の正規化部136より供給された相対角度変化量(正規化された差分値)の絶対値(ABS(p0))を閾値βと比較する。仮に、相対角度変化量の絶対値(ABS(p0))が閾値β以上であるとすると、モード判別部141は、新たな区間のモードも不安定モード172であると判別する。つまり、この区間と1つ前の区間は両方とも不安定モード172であるので、矢印183に示されるようにモード変化は発生しない。
仮に、相対角度変化量の絶対値(ABS(p0))が閾値βより小さい場合、モード判別部141は、新たな区間のモードを安定モード171であると判別する。つまり、1つ前の区間において不安定モード172であったのが、モード変化が発生し、現在の新たなモードは安定モード171に遷移する。その際、更新確認部144はモード遷移のパターンが矢印184により示される、不安定モード172から安定モード171への遷移であることを確認し、モード更新部145は、モードフラグ142の値を更新する。
モード変化パターン判定部146は、矢印182または矢印184のようにモードが遷移する場合、その遷移方向(モード変化パターン)を判定する。AF起動指示出力部123は、その判定結果に基づいて、矢印184のように、不安定モード172から安定モード171に遷移した場合のみ、AF起動指示をAF制御処理部83に出力する。
つまり、相対角度変化量の絶対値ABS(p0)≦αの場合(矢印181)、ABS(p0)>αの場合(矢印182)、および、ABS(p0)≧βの場合(矢印183)は、AF処理は起動せず、ABS(p0)<βの場合(矢印184)のみAF処理が開始される。換言すると、相対角度変化量のモードが不安定モード172から安定モード171に移行した場合(大きく変化していた相対角度の変化量が徐々に落ち着き、あまり変化しなくなった場合)に、AF処理が開始されることになる。
AF起動制御の具体例として、図7を参照し、撮影装置50をパンニングする場合について説明する。
例えば、図7Aに示されるように、ユーザが撮像装置50を右から左にパン(撮影方向を変化)させ、撮影画枠191の左側にあって撮影画像に写っていなかった被写体(被写体193A)が、撮影画枠191内に入り(被写体193B)、さらに撮影画枠191の右側に出て行く(被写体193C)ように撮影を行うとする。
このとき、撮影画枠191より中央付近に、撮影画枠191より小さい評価枠192を設け、撮影画像の評価値は、その評価枠192内で算出し、フィールド内輝度積分値は、撮影画枠191全体について算出するものとする。
この場合、評価枠192内に被写体が出入りすると(被写体193B)、評価値が大きく変化する。従って、この評価値の変化に応じてAF処理を起動させると、最終的に撮影画枠191の外に出てしまう被写体に焦点を合わせようとするので、フォーカス位置が移動したときにはその被写体が撮影画枠191内に存在せず、撮影画像は「ぼけ」てしまう。さらに、パンが終了すると評価値が安定してしまうので、AF処理が起動されず、撮影画像は「ぼけ」たままとなってしまう。
これに対して、フィールド内輝度積分値は、図7Aのように撮像装置50がパンニングされると、例えば、図7Bに示されるグラフの曲線194のように変化する。図7Bにおいて、横軸は時間を示し、縦軸はフィールド内輝度積分値を示している。例えば、時刻t1からt2までの間に図7Aに示されるようなパンが行われたとすると、時刻t1まで安定していたフィールド内輝度積分値は、時刻t1から時刻t2の間に大きく変化し、パンが終了した時刻t2以降はまた安定する。つまり、時刻t1まで安定モードであったモードが時刻t1において不安定モードに移行し、時刻t2において再度安定モードに移行する。
従って、AF起動制御部82によって、上述したようにフィールド内輝度積分値(フィールド内輝度積分値より算出される相対角度変化量の絶対値ABS(p0))を用いてAF起動制御が行われると、時刻t2のタイミング(不安定モードから安定モードへの移行タイミング)でのみAF処理が起動されることになる。つまり、フォーカス位置を制御するためのパラメータである評価値を用いずに、専用のパラメータである相対角度変化量を用いてAF処理の起動制御を行うことにより、撮像装置50(AF起動制御部82)は、不必要なAF処理を容易に低減させることができ、安定したAF処理を実現することができる。例えば、撮像装置50は、このようなAF起動制御を行うことにより、パンニング中の不必要な被写体(被写体193B)への合焦を抑制することができ、上述したように撮影画像のピント(焦点)が「ぼけ」てしまうことを抑制することができる。なお、チルト(チルティング)の場合も同様である。
以上のように、AF起動制御部82においては、相対角度変化量算出部121がAF処理の起動を制御するパラメータとして、カメラと被写体の相対角度の変化量を算出し、モード変化検出部122が、その変化量のモード変化パターンを特定し、AF起動指示出力部123がそのモード変化パターンに基づいて、AF制御処理部83にAF処理の起動指示を出力する。
また、他の具体例として、撮影画枠191内において被写体が揺れている場合のAF起動制御について説明する。
例えば、図8Aに示されるように、撮影画枠191内において、被写体193Dが揺れ動き、評価枠192に出入りするような場合、その評価値は大きく変動する。従って、この評価値の変化に応じてAF処理を起動させると、被写体193Dが揺れている間、常にAF処理が行われることになる。AF処理が行われると、例えばウォブリング等により、撮影画像のフォーカス位置が変化する。つまり、被写体193Dが揺れ動いている場合、頻繁に撮影画像のフォーカス位置が変化し続けることになり、撮影画像が、視聴者にとって不快な(違和感のある)画像となってしまう。特に、撮影画像が高品質なHD(High Definition)の場合、画質が高いだけに、視聴者はフォーカス位置の細かな変化まで確認することができ、その不必要なフォーカス位置の変化に対する不快感は、さらに大きなものとなってしまう。
これに対して、フィールド内輝度積分値は、撮影画枠191全体について算出されるので、図8Aのように被写体193Dが揺れ動いても、例えば、図8Bに示されるグラフの曲線195のように大きく変化しない。図8Bにおいて、横軸は時間を示し、縦軸はフィールド内輝度積分値を示している。撮影画枠191内において被写体193Dが動いても、輝度値の撮影画枠191全体の合計(積分値)は、大きく変化しない。つまり、この場合、相対角度変化量のモードは、常に安定モードとなる。
従って、AF起動制御部82によって、上述したようにフィールド内輝度積分値(フィールド内輝度積分値より算出される相対角度変化量の絶対値ABS(p0))を用いてAF起動制御が行われると、AF処理は起動されないことになる。つまり、撮像装置50は、被写体193Dの小さな動きに対しては、細かく合焦させずに、フォーカス位置を安定させる。このようにAF処理の起動を制御することにより、撮像装置50は、不必要な被写体(被写体193D)への合焦を抑制することができ、撮影画像のフォーカス位置を安定させ、フォーカス位置の不要な変化による不快な画像の発生を抑制することができる。
なお、図7および図8の場合、AF処理の起動を制御するために用いられるフィールド内輝度積分値は、撮影画枠191全体に対して算出され、フォーカス位置を制御するために用いられる評価値は、その撮影画枠191の一部である評価枠192について算出される。一般的に、評価枠192は小さいほど、ユーザは、その評価枠192内に位置させる被写体を特定し易くなるので、合焦させる被写体を特定し易くなり、フォーカス位置の制御が容易になる。従って、このように各値を算出する枠を設定することにより、撮像装置50は、ユーザが容易にフォーカス位置を制御することが出来るようにするとともに、不要なAF処理を抑制し、フォーカス位置を安定させるように、適切なAF起動制御を行うことができる。
もちろん、フィールド内輝度積分値を算出する範囲は、撮影画枠191の一部の範囲であってもよいし、その場合、撮影画枠191のどの部分であってもよい。また、撮影画枠191内に複数の範囲(フィールド内輝度積分値を算出する範囲)が設定されるようにしてもよいし、その場合、一部が他の範囲の一部に重なるような範囲が設定されるようにしてもよいし、他の範囲を抱含する範囲が設定されるようにしてもよい。
評価枠192についても同様であり、撮影画枠191のどの部分が評価枠192として設定されるようにしてもよい。また、撮影画枠191全体を評価枠192としてももちろんよい。さらに、撮影画枠191内に複数の評価枠192を設定するようにしてもよいし、その場合、他の評価枠と範囲の一部が重なるように評価枠を設定するようにしてもよいし、他の評価枠を抱合するような評価枠を設定するようにしてもよい。
フィールド内輝度積分値を算出する範囲の設定と、評価枠192の設定は、基本的に互いに独立しており、例えば両方の範囲を共通としてもよいが、一般的に、上述したように評価枠192は小さい方が望ましく、フィールド内輝度積分値を算出する範囲は、フォーカス位置を安定させる目的のために(被写体の揺れ動きに反応しないように)大きい方が望ましい。
また、フィールド内輝度積分値を算出する範囲が評価枠192の範囲と重なっていない場合、フィールド内輝度積分値と評価値は、互いに異なる被写体に対して影響を受けることになる。一般的には、ユーザが焦点を合わせている被写体の動きに基づいてAF処理の起動を制御するのが自然であるので、そのような目的のためには、フィールド内輝度積分値を算出する範囲が評価枠192の範囲を抱合するのが望ましい。もちろん、敢えてフィールド内輝度積分値を算出する範囲が評価枠192の範囲と重ならないようにし、撮像装置が、焦点を合焦させる被写体と異なる被写体の動きによって生じる輝度値の変化によってAF起動制御を行うようにしてもよい。
例えば、照明を被写体として撮影する場合、その照明が点灯したり消灯したりされると輝度値が変化するので、被写体(照明)の位置が動いていないにも関わらずAF処理が起動される恐れがあるが、所謂、ワイド端の撮影時のように、被写体(照明)が例えば撮影画枠191の半分程度しか占めないように撮影が行われる場合であれば、フィールド内輝度積分値を算出する範囲が、その被写体(照明)が写されていない部分に設定されている(評価枠192と重ならないように範囲が設定されている)ことにより、撮像装置50は、照明の点灯や消灯(被写体の輝度変化)の影響を受けずにAF起動制御を行うことができ、不要なAF処理を低減させることができ、撮影画像のフォーカス位置を適切に安定させることができる。
さらに、フィールド内輝度積分値を算出する範囲は、予め定められた範囲であってもよいし、ユーザが、撮影前や撮影中等に、撮影画枠191の任意の位置に設定することができるようにしてもよい。また、その際、そのフィールド内輝度積分値を算出する範囲の大きさおよび形状もユーザにより設定することができるようにしてもよい。さらに、フィールド内輝度積分値を算出する範囲としての候補が予め複数用意され、ユーザが撮影前や撮影中等にそれらの候補の中から任意の領域を選択し、フィールド内輝度積分値を算出する範囲として設定するようにしてもよい。なお、評価枠192についても同様であり、予め定められた領域であってもよいし、ユーザが撮影前や撮影中等に自由に設定することができるようにしてもよいし、予め用意された選択肢の中からユーザが選択的に設定することができうようにしてもよい。
フィールド内輝度積分値を算出する範囲や評価枠192が予め設定されていれば、ユーザは撮影時にそれらを設定する必要が無く、撮影を容易に行うことができる。また、フィールド内輝度積分値を算出する範囲や評価枠192をユーザが自由に設定することができるようになされていれば、環境や被写体等の撮影条件により適した範囲設定が可能になり、ユーザの意図に沿った、より好ましいAF処理を実現することができる。さらに、その範囲の設定をユーザが選択的に行うことができるようにすることにより、ユーザは容易に範囲設定を行うことができる。
なお、フィールド内輝度積分値を算出する範囲の設定方法として、ユーザがフィールド内輝度積分値を算出しない範囲を設定することができるようにしてももちろんよい。つまり、この場合撮像装置は、ユーザに指定された範囲以外の部分の輝度値を積分し、フィールド内輝度積分値を算出し、その値を用いてAF起動制御を行う。
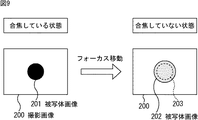
次に、撮影画像における飽和輝度数とフォーカス移動の関係について図9乃至図11を参照して説明する。図9乃至図11のいずれの場合も、左側に示される撮影画像200は、被写体に合焦している状態の撮影画像であり、右側に示される撮影画像200は、ウォブリング動作によりフォーカス位置が被写体からずれた状態の撮影画像である。
図9は、光源等ではない通常の被写体を撮影した場合の撮影画像の例を示す図である。
撮影画像200において、この通常の被写体の画像は、焦点がこの通常の被写体に合焦しているとき、図9の左側に示されるように、輝度が飽和していない、輪郭のはっきりした被写体画像201となる。この状態から、フォーカス位置が移動し(フォーカス移動し)、被写体に焦点が合焦しなくなると、通常の被写体の画像は、図9の右側に示されるように、輪郭がにじんでぼやけた被写体画像202となる。この被写体画像202は、点線203で示される被写体画像201(合焦している状態の被写体画像)の大きさより大きく表示される。また、そのぼやけた分、被写体画像202の各画素の輝度値は、被写体画像201の場合よりも低下する(暗くなる)。
従って、この場合、撮影画像200全体の輝度値の合計(つまりフィールド内輝度積分値)は大きく変化せず、相対角度変化量のモードは安定モード171であると判定されるので、AF処理(不要なAF処理)は起動されない。
図10は、円形の光源等のように撮影画像の輝度が飽和する被写体である飽和輝度被写体を撮影した場合の撮影画像の例を示す図である。
この場合の撮影画像200において、合焦時の円形の飽和輝度被写体の画像は、図10の左側に示されるように、輪郭のはっきりした円形の飽和輝度被写体画像204となる。ただし、この飽和輝度被写体画像204の各画素の輝度は飽和している。この状態から、フォーカス位置が移動し、飽和輝度被写体に焦点が合焦しなくなると、この飽和輝度被写体の画像は、図10の右側に示されるように、輪郭がにじんでぼやけた飽和輝度被写体画像205となる。この飽和輝度被写体画像205は、点線206で示される飽和輝度被写体画像204(合焦している状態の飽和輝度被写体画像)の大きさより大きく表示される。ただし、この場合、飽和輝度被写体画像204の輝度値が飽和しているので、フォーカス位置がずれても輝度値は飽和したままとなる。
従って、この場合、撮影画像200全体の輝度値の合計(つまりフィールド内輝度積分値)は、図10の右側の灰色に示される部分(点線206と飽和輝度被写体画像205の外枠の間の部分(飽和輝度被写体画像の、焦点が被写体からずれることにより大きくなった部分))の輝度値の増加分だけ増加する。
しかしながら、ウォブリング動作においてフォーカス位置の移動幅は微小であるので、飽和輝度被写体画像205と飽和輝度被写体画像204の面積の差は、飽和輝度被写体画像204全体の面積と比較して微小となる。従って、この輝度値の増加分によって撮影画像200全体の輝度値の合計(つまりフィールド内輝度積分値)は大きく変化しない。また、元々の飽和輝度被写体画像204の面積が撮影画像200の画像サイズに対して十分に小さければ、輝度値の増加分は、撮影画像200全体の輝度値の合計(つまりフィールド内輝度積分値)に対して微小となるので、この増加分によってフィールド内輝度積分値は大きく変化しない。従って、相対角度変化量のモードは安定モード171であると判定されるので、AF処理(不要なAF処理)は起動されない。
図11は、細い棒状の光源等のように撮影画像の輝度が飽和する棒状の被写体である棒状飽和輝度被写体を撮影した場合の撮影画像の例を示す図である。
この場合の撮影画像200において、合焦時の棒状飽和輝度被写体の画像は、図11の左側に示されるように、輪郭のはっきりした棒状飽和輝度被写体画像207となる。ただし、棒状飽和輝度被写体画像207の各画素の輝度は飽和している。この状態から、フォーカス位置が移動し、棒状飽和輝度被写体に焦点が合焦しなくなると、この棒状飽和輝度被写体の画像は、図11の右側に示されるように、輪郭がにじんでぼやけた棒状飽和輝度被写体画像208となる。この棒状飽和輝度被写体画像208は、点線209で示される棒状飽和輝度被写体画像207(合焦している状態の棒状飽和輝度被写体画像)の大きさより大きく表示される。ただし、この場合、棒状飽和輝度被写体画像207の輝度値が飽和しているので、フォーカス位置がずれても輝度値は飽和したままとなる。
この場合、棒状飽和輝度被写体画像207が細い棒状の画像であるので、棒状飽和輝度被写体画像208と棒状飽和輝度被写体画像207の面積の差は、棒状飽和輝度被写体画像207全体の面積と比較して無視できないほど大きくなる。
例えば、元々の棒状飽和輝度被写体画像207が1画素×100画素の画像であり、焦点が棒状飽和輝度被写体からずれることにより、その画像が1画素分ずつ広がるとすると、棒状飽和輝度被写体画像208は、3画素×102画素の画像となり、棒状飽和輝度被写体画像207の3倍以上の面積となる。因みに、図10において、円形の飽和輝度被写体画像204が半径10画素の円状の画像であり、焦点が飽和輝度被写体からずれることにより、その画像が1画素分ずつ広がるとすると、飽和輝度被写体画像205は、半径11画素の円状の画像となり、飽和輝度被写体画像204とほぼ同じ面積(1.2倍程度)となる。
さらに、例えば、ブラインド越しに光源を撮影したときの画像ように、撮影画像200全体に、この棒状飽和輝度被写体画像207が数画素置きに分布しているような場合、この焦点のずれによる(ウォブリングによる)輝度値の増加分は、撮影画像200全体の輝度値の合計(つまりフィールド内輝度積分値)に対して無視できないほど大きなものとなる恐れがある。
つまり、図11のように細い棒状の飽和輝度被写体を撮影する場合、図10の場合と異なり、ウォブリング等のフォーカス位置の変化によって生じるフィールド内輝度積分値の変化が十分に大きくなる恐れがある。このような場合、モード判別部141が、図9の例のように、通常の被写体のときと同様に相対角度変化量のモードを判別すると、不安定モード172であると判定してしまい、AF処理終了後に(フォーカス位置が安定した後に)、モード変化パターン判定部146によって、その不安定モード172から安定モード171に移行したと判定され、再度AF処理(不要なAF処理)が起動されてしまう恐れがある。
起動条件調整部84は、モード判別に用いる閾値(起動条件)を調整することにより、このような事態の発生を低減させる。
つまり、起動条件調整部84の閾値選択部155は、ウォブリング中の飽和輝度数の変化(最大値と最小値の比)の大小を、上述した式(2)の条件式を用いて判定することにより、被写体が棒状飽和輝度被写体であるか否かを判定し、その判定結果によって安定モード用閾値を選択する。例えば、閾値選択部155は、被写体が棒状飽和輝度被写体でない場合、安定モード用閾値として値αを選択して閾値保持部143にセットし、被写体が棒状飽和輝度被写体である場合、安定モード用閾値として値αより大きい(条件の厳しい)値(α×3)を選択して閾値保持部143にセットする。
従って、図12に示されるように、モードは、相対角度変化量の絶対値が閾値(α×3)を超えないと、安定モード171から不安定モード172に移行しない。従って、相対角度変化量の絶対値が閾値(α×3)以下であると、新たな区間のモードも安定モード171であると判別され、矢印211に示されるようにモード変化は発生しない。相対角度変化量の絶対値が閾値(α×3)より大きい場合のみ、モード変化が発生し、矢印212のように、モードは、安定モード171から不安定モード172に遷移される。
このように、図11に示されるような棒状飽和輝度被写体を撮影する場合においても、閾値選択部155が、安定モード用閾値として、棒状飽和輝度被写体以外の被写体を撮影する場合の閾値よりも大きな値を選択し、相対角度変化量のモードを安定モード171から不安定モード172に移行させる条件をより厳しくするので、AF起動制御部82は、不要なAF処理の起動を抑制することができる。これにより、撮像装置50は、より的確なAF処理を実現し、高品質な撮影画像が得られるようにすることができる。
なお、閾値選択部155が安定モード用閾値として通常以外の閾値を選択する被写体は、上述した棒状飽和輝度被写体でなくてもよく、その被写体を判別可能な条件式が設定可能であればどのような被写体であってもよい。換言すると、この閾値選択に用いられる条件式は、上述した式(2)以外の式であってもよい。さらに、閾値選択部155に選択される閾値の値もどのような値であってもよく、その選択肢の数は3つ以上であってもよい(条件式の数が複数であってもよい)。
次に、上述した各処理の流れについて説明する。最初に、図13のフローチャートを参照して、AF起動制御部82によるAF起動制御処理の流れの例を説明する。
信号処理部73より画像信号(フィールド画像またはフレーム画像)が供給されると、AF起動制御部82の相対角度変化量算出部121は、ステップS1において相対角度変化量算出処理を実行する。相対角度変化量算出処理の詳細については、図14のフローチャートを参照して後述する。
相対角度変化量算出処理を終了すると、モード変化検出部122は、ステップS2においてモード変化検出処理を実行する。モード変化検出処理の詳細は、図15のフローチャートを参照して後述する。
モード変化検出処理を終了すると、ステップS3において、AF起動指示出力部123は、モード変化検出処理結果に基づいて、AF処理を開始するか否かを判定する。上述したように、相対角度変化量のモードが不安定モード172から安定モード171に移行したと判定され、AF処理を開始すると判定した場合、AF起動指示出力部123は、ステップS4においてAF起動指示をAF制御処理部83に出力し、AF処理を起動させた後、AF起動制御処理を終了する。また、ステップS3において、相対角度変化量のモードが不安定モード172から安定モード171に移行していないと判定され、AF処理を開始しないと判定した場合、AF起動指示出力部123は、ステップS4の処理を省略し、AF起動制御処理を終了する。
次に、図13のステップS1において実行される相対角度変化量算出処理の詳細な流れの例について図14のフローチャートを参照して説明する。
画像信号が信号処理部73より供給され、相対角度変化量算出処理が開始されると、フィールド内輝度積分値算出部131は、最初に、ステップS21において、供給された画像信号に基づいて、フィールドの所定の領域(撮影画枠内の、領域設定部132により設定されている領域)内の輝度値の積分値(フィールド内輝度積分値)を算出する。
ステップS22において、区間別輝度積分平均値算出部133は、区間別輝度積分平均値保持部134と連携しながら、区間毎に輝度積分値の平均値(区間別輝度積分平均値)を求める。差分値算出部135は、ステップS23において、隣り合う区間(最新の区間と1つ前の区間)の区間別輝度積分平均値の差分値を算出する。ステップS24において、正規化部136は、ステップS23において算出された差分値を最新のフィールド内輝度積分値とフィールド数で正規化し、相対角度変化量を求める。ステップS24の処理が終了すると、正規化部136は、相対角度変化量算出処理を終了し、処理を図13のステップS1に戻し、ステップS2以降の処理を行う。
次に、図13のステップS2において実行されるモード変化検出処理の詳細の流れの例について図15のフローチャートを参照して説明する。
モード変化検出処理が開始されると、モード判別部141は、ステップS41において、正規化された差分値である相対角度変化量を、モードフラグ142および閾値保持部143を参照して得られる、1区間前のモードに応じた閾値(起動条件調整部84により選択されてセットされた閾値)と比較し、ステップS42において、最新のモードを判別する。ステップS43において、更新確認部144は、モードが変化したか否かを確認し、変化したと判定した場合、処理をステップS44に進める。ステップS44において、モード更新部145は、モードフラグ142の値を更新する。モード変化パターン判定部146は、ステップS45において、モード変化パターンを判定し、ステップS46において、モード判定結果をAF起動指示出力部123に出力し、モード変化検出処理を終了し、処理を図13のステップS2に戻す。AF起動制御部82は、ステップS3以降の処理を実行する。
また、ステップS43において、モードが変化していないと判定した場合、更新確認部144は、ステップS44乃至ステップS46の処理を省略し、モード変化検出処理を終了し、処理を図13のステップS2に戻す。AF起動制御部82は、ステップS3以降の処理を実行する。
以上のように各処理を行うことにより、AF起動制御部82は、不必要なAF処理を容易に低減させ、より的確なAF処理を実現し、高品質な撮影画像が得られるようにすることができる。
次に、図13のステップS4の処理に対応し、出力されたAF起動指示に従って開始されるワンショットAF制御処理について、図16のフローチャートを参照して説明する。
ワンショットAF制御処理を開始すると、AF制御処理部83は、最初に、ステップS61において、起動条件調整部84に起動条件調整処理を開始させる。この起動条件調整処理の詳細は、図17のフローチャートを参照して後述する。ステップS62において、AF制御処理部83は、駆動制御部64を制御し、ウォブリングレンズ62を駆動させるウォブリング処理を行い、フォーカスレンズ61を移動させる向きを決定する。このときのウォブリング中の撮影画像から、起動条件調整部84は、上述したように棒状飽和輝度被写体の存在を判定し、その有無に基づいてモード判別用の閾値を選択して設定する。ウォブリング処理が終了すると、AF制御処理部83は、ステップS63において、駆動制御部64を制御し、ウォブリング処理により決定された向きにフォーカスレンズ61を移動させながら、評価値算出部81を用いて撮影画像の「ぼけ」を評価する評価値を算出し、その評価値に基づいて最適なフォーカス位置を検索するフォーカス位置検索処理を行う。最適なフォーカス位置が検索されると、AF制御処理部83は、駆動制御部64を制御し、検索された最適なフォーカス位置に焦点を合わせるようにフォーカスレンズ61を駆動させる、合焦処理を行う。焦点が合焦すると、AF制御処理部83は、ワンショットAF制御処理を終了する。
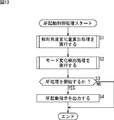
次に、図16のステップS61の処理によりAF制御処理部83より開始を指示された起動条件調整部84により開始される起動条件調整処理について、図17のフローチャートを参照して説明する。
起動条件調整処理が開始されると、起動条件調整部84の飽和輝度数算出部151は、ステップS81において、信号処理部73より取得した画像信号を用いて、ウォブリング中の撮影画像の飽和輝度数を算出する。つまり、飽和輝度数算出部151は、Mフィールド分のフィールド画像信号のそれぞれについて飽和輝度数を算出する。飽和輝度数算出部151は、算出した飽和輝度数の情報を順次、飽和輝度数履歴保持部152に供給し、保持させる。
飽和輝度数履歴保持部152は、ステップS82において、その供給された飽和輝度数の情報を履歴として保持する。既にMフィールド分の履歴を保持している場合、飽和輝度数履歴保持部152は、保持している最も古い履歴を削除して、新しい飽和輝度数の情報を保持する。
ステップS83において、飽和輝度数最大値検索部153は、飽和輝度数履歴保持部152に保持されている履歴から飽和輝度数の最大値を検索し、その値を取得する。飽和輝度数最大値検索部153は、取得した最大値を閾値選択部155に供給し、飽和輝度数最小値検索部154に処理終了を伝える。飽和輝度数最小値検索部154は、ステップS84において、飽和輝度数履歴保持部152に保持されている履歴から飽和輝度数の最小値を検索し、その値を取得する。飽和輝度数最小値検索部154は、取得した最小値を閾値選択部155に供給するとともに処理終了を伝える。
閾値選択部155は、ステップS85において、式(2)に示される条件式を演算する閾値選択用演算を行い、ステップS86において、その演算結果に基づいて、式(2)に示される条件式が満たされるか否かを判定する。式(2)を満たすと判定した場合、閾値選択部155は、処理をステップS87に進め、例えば棒状飽和輝度被写体に対する閾値である第1閾値(例えば、閾値(α×3))を選択し、その閾値を閾値更新部156に供給する。閾値が供給されると閾値更新部156は、ステップS88において、その閾値を用いて閾値保持部143に保持されている閾値を更新する。更新が終了すると閾値更新部156は、起動条件調整処理を終了する。
また、ステップS86において、式(2)を満たさないと判定した場合、閾値選択部155は、処理をステップS89に進め、例えば通常の被写体に対する閾値である第2閾値(例えば、閾値α)を選択し、その閾値を閾値更新部156に供給する。閾値が供給されると閾値更新部156は、ステップS88において、その閾値を用いて閾値保持部143に保持されている閾値を更新する。更新が終了すると閾値更新部156は、起動条件調整処理を終了する。
以上のように、輝度条件調整部84が、撮影画像の飽和輝度数を用いて、起動条件(閾値)を調整するので、撮像装置50は、棒状飽和輝度被写体を撮影するような特殊な被写体の場合であっても、不必要なAF処理を容易に低減させ、より的確なAF処理を実現し、高品質な撮影画像が得られるようにすることができる。
なお、上述したように、輝度条件調整部84により安定モード用閾値が高く設定された場合(α×3)であっても、飽和輝度被写体の存在は、フィールド内輝度積分値に大きく影響をおよぼすため、パンニングやチルティングが行われたり、被写体(棒状飽和輝度被写体)が移動したりしたときの輝度変化は閾値に対して十分大きく、閾値が低く設定された場合(α)と同様に不安定モードに移行する。すなわち、上述した輝度条件調整部84による閾値の調整は、閾値の変更率を調整する等して、パンニングやチルティング等の際のモード判定には大きく影響せず、AF起動の不要な妨げとならないように行われる。
なお、以上においては、輝度条件調整部84が、起動条件(閾値)の調整を、AF処理のウォブリング時の撮影画像を用いて行うように説明したが、処理の実行タイミングはこれに限らず、いつ開始するようにしてもよい。例えば、輝度条件調整部84が、定期的に起動条件調整処理を開始するようにしてもよいし、上述したのと異なるきっかけにより起動条件調整処理を開始するようにしてもよい。また、飽和輝度数を算出するためにウォブリング動作を行うようにしてもよい。
なお、以上において、AF処理の起動を制御するパラメータであるカメラと被写体の相対角度の変化量は、撮影画像の輝度値を用いた値であるように説明したが、これに限らず、例えば、コントラストに関する値を用いる等、輝度値以外の値を用いて算出される値であってもよい。また、演算方法も上述した以外の方法であってもよい。例えば、区間毎にフィールド内輝度積分値の平均値を算出し、その平均値を用いて相対角度変化量を算出するように説明したが、これに限らず、例えば、輝度値の積分値でなく平均値を用いるようにしてもよいし、フィールド内輝度積分値の区間毎の平均値の代わりに、フィールド内輝度積分値の合計値を用いて相対角度変化量を算出するようにしてもよい。フィールド単位で求められた輝度値の平均値の、区間毎の平均値を用いて相対角度変化量を算出するようにしてももちろんよい。また、正規化も、最新のフィールド内輝度値とフィールド数を用いる代わりに、区間別輝度積分平均値等の他の値を用いるようにしてもよい。また、正規化を行わないようにしてもよい。
また、AF起動制御用のパラメータとして、カメラと被写体の相対角度の変化量以外の値を用いるようにしてもよい。さらに、AF起動制御用のパラメータとして、カメラと被写体の相対角度の変化量と、それ以外の値を併用するようにしてもよい。
上述した一連の処理は、ハードウェアにより実行させることもできるし、ソフトウエアにより実行させることもできる。上述した一連の処理をソフトウエアにより実行させる場合には、そのソフトウエアを構成するプログラムが、ネットワークや記録媒体からインストールされる。
この記録媒体は、例えば、上述したように、装置本体とは別に、ユーザにプログラムを配信するために配布されるリムーバブルメディア97により構成されるだけでなく、装置本体に予め組み込まれた状態でユーザに配信される、プログラムが記録されているROM91や、記憶部94に含まれるハードディスクなどで構成される。
なお、本明細書において、記録媒体に記録されるプログラムを記述するステップは、記載された順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的あるいは個別に実行される処理をも含むものである。
また、本明細書において、1つの装置として説明した構成を分割し、複数の装置として構成するようにしてもよい。逆に、以上において複数の装置として説明した構成をまとめて1つの装置として構成されるようにしてもよい。また、上述した以外の構成を付加するようにしてももちろんよい。さらに、装置全体としての構成や動作が実質的に同じであれば、ある部分の構成の一部を他の部分の構成に含めるようにしてもよい。
50 撮像装置, 51 AF駆動部, 52 画像処理部, 53 AF制御部, 61 フォーカスレンズ, 62 ウォブリングレンズ, 63 レンズ駆動部, 64 駆動制御部, 73 信号処理部, 81 評価値算出部, 82 AF起動制御部, 83 AF制御処理部, 84 起動条件調整部, 121 相対角度変化量算出部, 122 モード変化検出部, 123 AF起動指示出力部, 131 フィールド内輝度積分値算出部, 132 領域設定部, 133 区間別輝度積分平均値算出部, 134 区間別輝度積分平均値保持部, 135 差分値算出部, 136 正規化部, 141 モード判別部, 142 モードフラグ, 143 閾値保持部, 144 更新確認部, 145 モード更新部, 146 モード変化パターン判定部, 151 飽和輝度数履歴保持部152, 153 飽和輝度数最大値検索部, 154 飽和輝度数最小値検索部, 155 閾値選択部, 156 閾値更新部 171 安定モード, 172 不安定モード, 191 撮影画枠, 192 評価枠, 193A乃至193D 被写体