JP4413036B2 - 描画装置、描画データ生成装置、描画方法、および描画データ生成方法 - Google Patents
描画装置、描画データ生成装置、描画方法、および描画データ生成方法 Download PDFInfo
- Publication number
- JP4413036B2 JP4413036B2 JP2004049821A JP2004049821A JP4413036B2 JP 4413036 B2 JP4413036 B2 JP 4413036B2 JP 2004049821 A JP2004049821 A JP 2004049821A JP 2004049821 A JP2004049821 A JP 2004049821A JP 4413036 B2 JP4413036 B2 JP 4413036B2
- Authority
- JP
- Japan
- Prior art keywords
- data
- head
- relative movement
- data generation
- target surface
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000000034 method Methods 0.000 title claims description 112
- 230000008569 process Effects 0.000 claims description 73
- 238000012545 processing Methods 0.000 claims description 44
- 238000004364 calculation method Methods 0.000 claims description 39
- 238000013461 design Methods 0.000 claims description 36
- 238000004519 manufacturing process Methods 0.000 claims description 24
- 230000008859 change Effects 0.000 claims description 7
- 238000012790 confirmation Methods 0.000 claims description 3
- 230000003111 delayed effect Effects 0.000 claims description 2
- 230000002123 temporal effect Effects 0.000 claims 1
- 239000000758 substrate Substances 0.000 description 28
- 238000012937 correction Methods 0.000 description 8
- 238000010586 diagram Methods 0.000 description 8
- 238000000059 patterning Methods 0.000 description 8
- 238000006243 chemical reaction Methods 0.000 description 6
- 230000008602 contraction Effects 0.000 description 2
- 238000005530 etching Methods 0.000 description 2
- 238000002474 experimental method Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000002360 preparation method Methods 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 230000003750 conditioning effect Effects 0.000 description 1
- 230000001186 cumulative effect Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000010894 electron beam technology Methods 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70483—Information management; Active and passive control; Testing; Wafer monitoring, e.g. pattern monitoring
- G03F7/70491—Information management, e.g. software; Active and passive control, e.g. details of controlling exposure processes or exposure tool monitoring processes
- G03F7/70508—Data handling in all parts of the microlithographic apparatus, e.g. handling pattern data for addressable masks or data transfer to or from different components within the exposure apparatus
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Accessory Devices And Overall Control Thereof (AREA)
- Record Information Processing For Printing (AREA)
Description
各描画データに対して、設計データに基づいて当該描画データを生成してから描画エンジンに供給するまでの一連の演算処理を実行し、各描画データの生成開始時および当該描画データの描画エンジンへの供給完了時を計測し予測する計測手段11と、
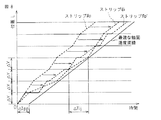
各描画データについて予測された生成開始時および供給完了時と、当該描画データに対応する描画ブロックの描画対象面上の位置と、の関係をグラフ上に表したデータ発生プロファイル21を作成する第1の作成手段12と、
描画ヘッドの描画対象面に対する相対移動速度を用いて、描画対象面に対する描画ヘッドの座標の時間変化を表した描画速度直線22をグラフ上に作成する第2の作成手段13と、
データ発生プロファイル21と描画速度直線22とを比較し、どの描画ヘッドの座標位置においても、データ発生プロファイル21上の各点が描画速度直線22上の各点よりも時間的に先行することになるような描画速度直線22’の起点を計算し、この起点を描画ヘッドの相対移動および描画処理の開始時として確定する確定手段14と、
を備える。
10…演算手段
11…計測手段
12…第1の作成手段
13…第2の作成手段
14…確定手段
Claims (30)
- 描画対象面上を相対移動する描画ヘッドが一度に描画可能な前記描画対象面上の描画ブロックへの描画処理に必要な描画データが、設計データに基づいて順次生成されてメモリに一旦記憶された後、描画エンジンに順次供給される描画装置であって、
前記メモリに少なくとも前記描画データが蓄積されるよう、前記描画ヘッドの相対移動および描画処理を、前記描画データの生産開始よりも遅延して開始させる描画開始指示データを演算する演算手段を備えることを特徴とする描画装置。 - 前記描画データと、前記演算手段で予め演算された前記描画開始指示データと、を少なくとも含む統合データを生成する統合データ生成手段をさらに備え、
前記統合データを用いて所望の描画処理を実行する請求項1に記載の描画装置。 - 前記演算手段は、
各前記描画データに対して、前記設計データに基づいて当該描画データを生成してから前記描画エンジンに供給するまでの一連の演算処理を実行し、各前記描画データの生成開始時および当該描画データの前記描画エンジンへの供給完了時を計測し予測する計測手段と、
各前記描画データについて予測された前記生成開始時および前記供給完了時と、当該描画データに対応する前記描画ブロックの前記描画対象面上の位置と、の関係をグラフ上に表したデータ発生プロファイルを作成する第1の作成手段と、
前記描画ヘッドの前記描画対象面に対する相対速度を用いて、前記描画対象面に対する前記描画ヘッドの座標の時間変化を表した描画速度直線を前記グラフ上に作成する第2の作成手段と、
前記データ発生プロファイルと前記描画速度直線とを比較し、どの前記描画ヘッドの座標位置においても、前記データ発生プロファイル上の各点が前記描画速度直線上の各点よりも時間的に先行することになるような前記描画速度直線の起点を計算し、この起点を前記描画ヘッドの相対移動および描画処理の開始時として確定する確定手段と、
を備える請求項1または2に記載の描画装置。 - 前記データ発生プロファイルは、前記グラフ上において、
前記描画データの前記生成開始時と、当該描画データに対応する前記描画ブロックの前記相対移動方向の開始座標と、で決定される始点と、
当該描画データの前記供給完了時と、当該描画データに対応する前記描画ブロックの前記相対移動方向の終了座標と、で決定される終点と、
を各前記描画データについて結線して得られる請求項3に記載の描画装置。 - 前記確定手段は、
前記描画速度直線と前記グラフの第1の軸とのなす角を計算する第1の計算手段と、
前記データ発生プロファイルを前記角を回転角として前記第1の軸の方向に回転移動する第2の計算手段と、
前記の回転移動をしたデータ発生プロファイルの前記第1の軸とは異なる第2の軸方向の座標が最大となる最大座標値を計算する第3の計算手段と、
前記最大座標値が正であるか否かを判定する第4の計算手段と、
該第4の計算手段で正であると判定されたとき、前記描画速度直線を、少なくとも当該最大座標値の大きさだけ前記第2の軸の正の方向に平行移動する第5の計算手段と、
前記の平行移動をした前記描画速度直線と前記第2の軸との交点を計算し、該交点の前記第2の軸上の座標を前記描画ヘッドの相対移動および描画処理の開始時として確定する第6の計算手段と、
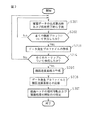
を有する請求項3または4に記載の描画装置。 - 前記メモリの前記描画データの蓄積量が所定値より大きいか否かを判定する判定手段と、
該判定手段が前記所定値よりも大きいと判定したとき、当該描画データの前記供給完了後のさらなる前記描画データの生成を一時休止する休止手段と、
をさらに備える請求項4に記載の描画装置。 - 前記データ発生プロファイルは、前記描画ヘッドの相対移動の方向に直交する方向に複数並んだ描画ヘッドにそれぞれ対応する前記相対移動の方向の描画ブロック群毎に生成され、
前記確定手段は、複数の前記データ発生プロファイルと前記描画速度直線とを比較し、どの前記描画ヘッドの座標位置においても、前記データ発生プロファイル上の各点が前記描画速度直線上の各点よりも時間的に先行することになるような前記描画速度直線の起点を計算し、この起点を前記描画ヘッドの相対移動および描画処理の開始時として確定する請求項3〜6のいずれか一項に記載の描画装置。 - 描画対象面上を相対移動する描画ヘッドが一度に描画可能な前記描画対象面上の描画ブロックへの描画処理に必要な描画データが、設計データに基づいて順次生成されてメモリに一旦記憶された後、描画エンジンに順次供給される描画装置であって、
前記メモリに少なくとも前記描画データが蓄積されるよう、前記描画ヘッドの相対移動および描画処理の開始を、前記描画データの生産開始よりも遅延させる遅延手段を備えることを特徴とする描画装置。 - 描画対象面上を相対移動する描画ヘッドが一度に描画可能な前記描画対象面上の描画ブロックへの描画処理に必要な描画データが、設計データに基づいて順次生成されてメモリに一旦記憶された後、描画エンジンに順次供給される描画装置であって、
前記メモリに少なくとも前記描画データが蓄積されるよう、前記描画ヘッドの相対移動および描画処理の開始前に生産すべき前記描画データのデータ量を確定する確定手段を備えることを特徴とする描画装置。 - 描画対象面上を相対移動する描画装置の描画ヘッドが一度に描画可能な前記描画対象面上の描画ブロックへの描画処理のために、メモリに一旦記憶された後に描画装置の描画エンジンに順次供給される描画データを、設計データに基づいて生成する描画データ生成装置であって、
前記メモリに少なくとも前記描画データが蓄積されるよう、前記描画ヘッドの相対移動および描画処理を、前記描画データの生産開始よりも遅延して開始させる描画開始指示データを演算する演算手段と、
を備えることを特徴とする描画データ生成装置。 - 前記描画データと、前記演算手段で予め演算された前記描画開始指示データと、を少なくとも含む統合データを生成する統合データ生成手段をさらに備える請求項10に記載の描画データ生成装置。
- 前記演算手段は、
各前記描画データに対して、前記設計データに基づいて当該描画データを生成してから前記描画エンジンに供給するまでの一連の演算処理を実行し、各前記描画データの生成開始時および当該描画データの前記描画エンジンへの供給完了時を計測し予測する計測手段と、
各前記描画データについて予測された前記生成開始時および前記供給完了時と、当該描画データに対応する前記描画ブロックの前記描画対象面上の位置と、の関係を、グラフ上に示したデータ発生プロファイルを作成する第1の作成手段と、
前記描画ヘッドの前記描画対象面に対する相対速度を用いて、前記描画対象面に対する前記描画ヘッドの座標の時間変化を示した描画速度直線を前記グラフ上に作成する第2の作成手段と、
前記データ発生プロファイルと前記描画速度直線とを比較し、どの前記描画ヘッドの座標位置においても、前記データ発生プロファイル上の各点が前記描画速度直線上の各点よりも時間的に先行することになるような前記描画速度直線の起点を計算し、この起点を前記描画ヘッドの相対移動および描画処理の開始時として確定する確定手段と、
を備える請求項10または11に記載の描画データ生成装置。 - 前記データ発生プロファイルは、前記グラフ上において、
前記描画データの前記生成開始時と、当該描画データに対応する前記描画ブロックの前記相対移動方向の開始座標と、で決定される始点と、
当該描画データの前記供給完了時と、当該描画データに対応する前記描画ブロックの前記相対移動方向の終了座標と、で決定される終点と、
を各前記描画データについて結線して得られる請求項12に記載の描画データ生成装置。 - 前記確定手段は、
前記描画速度直線と前記グラフの第1の軸とのなす角を計算する第1の計算手段と、
前記データ発生プロファイルを前記角を回転角として前記第1の軸の方向に回転移動する第2の計算手段と、
前記の回転移動をしたデータ発生プロファイルの前記第1の軸とは異なる第2の軸方向の座標が最大となる最大座標値を計算する第3の計算手段と、
前記最大座標値が正であるか否かを判定する第4の計算手段と、
該第4の計算手段で正であると判定されたとき、前記描画速度直線を、少なくとも当該最大座標値の大きさだけ前記第2の軸の正の方向に平行移動する第5の計算手段と、
前記の平行移動をした前記描画速度直線と前記第2の軸との交点を計算し、該交点の前記第2の軸上の座標を前記描画ヘッドの相対移動および描画処理の開始時として確定する第6の計算手段と、
を有する請求項12または13に記載の描画データ生成装置。 - 前記データ発生プロファイルは、前記描画ヘッドの相対移動の方向に直交する方向に複数並んだ描画ヘッドにそれぞれ対応する前記相対移動の方向の描画ブロック群毎に生成され、
前記確定手段は、複数の前記データ発生プロファイルと前記描画速度直線とを比較し、どの前記描画ヘッドの座標位置においても、前記データ発生プロファイル上の各点が前記描画速度直線上の各点よりも時間的に先行することになるような前記描画速度直線の起点を計算し、この起点を前記描画ヘッドの相対移動および描画処理の開始時として確定する請求項12〜14のいずれか一項に記載の描画データ生成装置。 - 描画対象面上を相対移動する描画装置の描画ヘッドが一度に描画可能な前記描画対象面上の描画ブロックへの描画処理に必要な描画データが、設計データに基づいて順次生成されてメモリに一旦記憶された後、前記描画装置の描画エンジンに順次供給される描画方法であって、
前記メモリに少なくとも前記描画データが蓄積されるよう、前記描画ヘッドの相対移動および描画処理を、前記描画データの生産開始よりも遅延して開始させる描画開始指示データを演算する演算ステップを備えることを特徴とする描画方法。 - 前記描画データと、前記演算ステップで予め演算された前記描画開始指示データと、を少なくとも含む統合データを生成する統合データ生成ステップをさらに備え、
前記描画装置は、前記統合データを用いて所望の描画処理を実行する請求項16に記載の描画方法。 - 前記演算ステップは、
各前記描画データに対して、前記設計データに基づいて当該描画データを生成してから前記描画エンジンに供給するまでの一連の演算処理を実行し、各前記描画データの生成開始時および当該描画データの前記描画エンジンへの供給完了時を計測し予測する計測ステップと、
各前記描画データについて予測された前記生成開始時および前記供給完了時と、当該描画データに対応する前記描画ブロックの前記描画対象面上の位置と、の関係をグラフ上に表したデータ発生プロファイルを作成する第1の作成ステップと、
前記描画ヘッドの前記描画対象面に対する相対速度を用いて、前記描画対象面に対する前記描画ヘッドの座標の時間変化を表した描画速度直線を前記グラフ上に作成する第2の作成ステップと、
前記データ発生プロファイルと前記描画速度直線とを比較し、どの前記描画ヘッドの座標位置においても、前記データ発生プロファイル上の各点が前記描画速度直線上の各点よりも時間的に先行することになるような前記描画速度直線の起点を計算し、この起点を前記描画ヘッドの相対移動および描画処理の開始時として確定する確定ステップと、
を備える請求項16または17に記載の描画方法。 - 前記データ発生プロファイルは、前記グラフ上において、
前記描画データの前記生成開始時と、当該描画データに対応する前記描画ブロックの前記相対移動方向の開始座標と、で決定される始点と、
当該描画データの前記供給完了時と、当該描画データに対応する前記描画ブロックの前記相対移動方向の終了座標と、で決定される終点と、
を各前記描画データについて結線して得られる請求項18に記載の描画方法。 - 前記確定ステップは、
前記描画速度直線と前記グラフの第1の軸とのなす角を計算する第1の計算ステップと、
前記データ発生プロファイルを前記角を回転角として前記第1の軸の方向に回転移動する第2の計算ステップと、
前記の回転移動をしたデータ発生プロファイルの前記第1の軸とは異なる第2の軸方向の座標が最大となる最大座標値を計算する第3の計算ステップと、
前記最大座標値が正であるか否かを判定する第4の計算ステップと、
該第4の計算ステップにおいて正であると判定されたとき、前記描画速度直線を、少なくとも当該最大座標値の大きさだけ前記第2の軸の正の方向に平行移動する第5の計算ステップと、
前記の平行移動をした前記描画速度直線と前記第2の軸との交点を計算し、該交点の前記第2の軸上の座標を前記描画ヘッドの相対移動および描画処理の開始時として確定する第6の計算ステップと、
を有する請求項18または19に記載の描画方法。 - 前記メモリの前記描画データの蓄積量が所定値より大きいか否かを判定する判定ステップと、
該判定ステップにおいて前記所定値よりも大きいと判定されたとき、当該描画データの前記供給完了後のさらなる前記描画データの生成を一時休止する休止ステップと、
をさらに備える請求項19に記載の描画方法。 - 前記データ発生プロファイルは、前記描画ヘッドの相対移動の方向に直交する方向に複数並んだ描画ヘッドにそれぞれ対応する前記相対移動の方向の描画ブロック群毎に生成され、
前記確定ステップでは、複数の前記データ発生プロファイルと前記描画速度直線とを比較し、どの前記描画ヘッドの座標位置においても、前記データ発生プロファイル上の各点が前記描画速度直線上の各点よりも時間的に先行することになるような前記描画速度直線の起点を計算し、この起点を前記描画ヘッドの相対移動および描画処理の開始時として確定する請求項18〜21のいずれか一項に記載の描画方法。 - 描画対象面上を相対移動する描画装置の描画ヘッドが一度に描画可能な前記描画対象面上の描画ブロックへの描画処理に必要な描画データが、設計データに基づいて順次生成されてメモリに一旦記憶された後、前記描画装置の描画エンジンに順次供給される描画方法であって、
前記メモリに少なくとも前記描画データが蓄積されるよう、前記描画ヘッドの相対移動および描画処理の開始を、前記描画データの生産開始よりも遅延させることを特徴とする描画方法。 - 描画対象面上を相対移動する描画装置の描画ヘッドが一度に描画可能な前記描画対象面上の描画ブロックへの描画処理に必要な描画データが、設計データに基づいて順次生成されてメモリに一旦記憶された後、前記描画装置の描画エンジンに順次供給される描画方法であって、
前記メモリに少なくとも前記描画データが蓄積されるよう、前記描画ヘッドの相対移動および描画処理の開始前に生産すべき前記描画データのデータ量を確定することを特徴とする描画方法。 - 描画対象面上を相対移動する描画装置の描画ヘッドが一度に描画可能な前記描画対象面上の描画ブロックへの描画処理のために、メモリに一旦記憶された後に描画装置の描画エンジンに順次供給される描画データを、設計データに基づいて生成する描画データ生成方法であって、
前記メモリに少なくとも前記描画データが蓄積されるよう、前記描画ヘッドの相対移動および描画処理を、前記描画データの生産開始よりも遅延して開始させる描画開始指示データを演算する演算ステップと、
を備えることを特徴とする描画データ生成方法。 - 前記描画データと、前記演算ステップにおいて予め演算された前記描画開始指示データと、を少なくとも含む統合データを生成する統合データ生成ステップをさらに備える請求項25に記載の描画データ生成方法。
- 前記演算ステップは、
各前記描画データに対して、前記設計データに基づいて当該描画データを生成してから前記描画エンジンに供給するまでの一連の演算処理を実行し、各前記描画データの生成開始時および当該描画データの前記描画エンジンへの供給完了時を計測し予測する計測ステップと、
各前記描画データについて予測された前記生成開始時および前記供給完了時と、当該描画データに対応する前記描画ブロックの前記描画対象面上の位置と、の関係を、グラフ上に示したデータ発生プロファイルを作成する第1の作成ステップと、
前記描画ヘッドの前記描画対象面に対する相対速度を用いて、前記描画対象面に対する前記描画ヘッドの座標の時間変化を示した描画速度直線を前記グラフ上に作成する第2の作成ステップと、
前記データ発生プロファイルと前記描画速度直線とを比較し、どの前記描画ヘッドの座標位置においても、前記データ発生プロファイル上の各点が前記描画速度直線上の各点よりも時間的に先行することになるような前記描画速度直線の起点を計算し、この起点を前記描画ヘッドの相対移動および描画処理の開始時として確定する確定ステップと、
を備える請求項25または26に記載の描画データ生成方法。 - 前記データ発生プロファイルは、前記グラフ上において、
前記描画データの前記生成開始時と、当該描画データに対応する前記描画ブロックの前記相対移動方向の開始座標と、で決定される始点と、
当該描画データの前記供給完了時と、当該描画データに対応する前記描画ブロックの前記相対移動方向の終了座標と、で決定される終点と、
を各前記描画データについて結線して得られる請求項27に記載の描画データ生成方法。 - 前記確定ステップは、
前記描画速度直線と前記グラフの第1の軸とのなす角を計算する第1の計算ステップと、
前記データ発生プロファイルを前記角を回転角として前記第1の軸の方向に回転移動する第2の計算ステップと、
前記の回転移動をしたデータ発生プロファイルの前記第1の軸とは異なる第2の軸方向の座標が最大となる最大座標値を計算する第3の計算ステップと、
前記最大座標値が正であるか否かを判定する第4の計算ステップと、
該第4の計算ステップにおいて正であると判定されたとき、前記描画速度直線を、少なくとも当該最大座標値の大きさだけ前記第2の軸の正の方向に平行移動する第5の計算ステップと、
前記の平行移動をした前記描画速度直線と前記第2の軸との交点を計算し、該交点の前記第2の軸上の座標を前記描画ヘッドの相対移動および描画処理の開始時として確定する第6の計算ステップと、
を有する請求項27または28に記載の描画データ生成方法。 - 前記データ発生プロファイルは、前記描画ヘッドの相対移動の方向に直交する方向に複数並んだ描画ヘッドにそれぞれ対応する前記相対移動の方向の描画ブロック群毎に生成され、
前記確定ステップでは、複数の前記データ発生プロファイルと前記描画速度直線とを比較し、どの前記描画ヘッドの座標位置においても、前記データ発生プロファイル上の各点が前記描画速度直線上の各点よりも時間的に先行することになるような前記描画速度直線の起点を計算し、この起点を前記描画ヘッドの相対移動および描画処理の開始時として確定する請求項27〜29のいずれか一項に記載の描画データ生成方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004049821A JP4413036B2 (ja) | 2004-02-25 | 2004-02-25 | 描画装置、描画データ生成装置、描画方法、および描画データ生成方法 |
| TW094104461A TWI363704B (en) | 2004-02-25 | 2005-02-16 | Drawing apparatus and drawing-data-generation apparatus therefor as well as drawing method and drawing-data-generation method therefor to efficiently perform stable drawing operations |
| US11/064,087 US7605941B2 (en) | 2004-02-25 | 2005-02-24 | Drawing apparatus and drawing-data-generation apparatus therefor as well as drawing method and drawing-data-generation method therefor to efficiently perform stable drawing operations |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004049821A JP4413036B2 (ja) | 2004-02-25 | 2004-02-25 | 描画装置、描画データ生成装置、描画方法、および描画データ生成方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005241834A JP2005241834A (ja) | 2005-09-08 |
| JP2005241834A5 JP2005241834A5 (ja) | 2007-02-08 |
| JP4413036B2 true JP4413036B2 (ja) | 2010-02-10 |
Family
ID=34858274
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004049821A Expired - Lifetime JP4413036B2 (ja) | 2004-02-25 | 2004-02-25 | 描画装置、描画データ生成装置、描画方法、および描画データ生成方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7605941B2 (ja) |
| JP (1) | JP4413036B2 (ja) |
| TW (1) | TWI363704B (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017104717A1 (ja) * | 2015-12-17 | 2017-06-22 | 株式会社ニコン | パターン描画装置 |
| JP6900284B2 (ja) * | 2017-09-27 | 2021-07-07 | 株式会社Screenホールディングス | 描画装置および描画方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4722064A (en) * | 1984-11-27 | 1988-01-26 | Fuji Xerox Co., Ltd. | Drawing output unit |
| US5138561A (en) * | 1989-11-01 | 1992-08-11 | Xerox Corporation | Computer graphics plotter control |
| WO1997033219A1 (fr) * | 1996-03-04 | 1997-09-12 | Copyer Co., Ltd. | Processeur d'images |
| JPH10112579A (ja) | 1996-10-07 | 1998-04-28 | M S Tec:Kk | レジスト露光方法及びその露光装置 |
| JP2003050774A (ja) * | 2001-08-08 | 2003-02-21 | Matsushita Electric Ind Co Ltd | データ処理装置およびデータ転送方法 |
-
2004
- 2004-02-25 JP JP2004049821A patent/JP4413036B2/ja not_active Expired - Lifetime
-
2005
- 2005-02-16 TW TW094104461A patent/TWI363704B/zh active
- 2005-02-24 US US11/064,087 patent/US7605941B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| TWI363704B (en) | 2012-05-11 |
| TW200532752A (en) | 2005-10-01 |
| JP2005241834A (ja) | 2005-09-08 |
| US7605941B2 (en) | 2009-10-20 |
| US20050184990A1 (en) | 2005-08-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7043712B2 (en) | Method for adaptive segment refinement in optical proximity correction | |
| JP4126096B2 (ja) | 感光性被覆を有する基板上に集束レーザ放射により構造物を製作する方法と装置 | |
| US9836556B2 (en) | Optical proximity correction for directed-self-assembly guiding patterns | |
| US7966584B2 (en) | Pattern-producing method for semiconductor device | |
| CN106886132B (zh) | 一种基于dmd的扫描式光刻机灰度图像曝光方法 | |
| JPH0915833A (ja) | 露光用マスク作製装置における走査用データ作成装置及び走査用データの作成方法 | |
| JP5840584B2 (ja) | 露光装置、露光方法および半導体装置の製造方法 | |
| CN111474825A (zh) | 光刻机运动轨迹规划方法、装置、计算机设备和存储介质 | |
| JP2011159764A (ja) | パターン形成方法、レジスト塗布分布算出装置及びレジスト塗布分布算出プログラム | |
| CN112255887A (zh) | 分段对准建模方法 | |
| JP4413036B2 (ja) | 描画装置、描画データ生成装置、描画方法、および描画データ生成方法 | |
| WO2018173371A1 (ja) | 描画装置および描画方法 | |
| JP2008065246A (ja) | レイアウトパターン補正装置、レイアウトパターン補正方法、及びプログラム | |
| JPH11260683A (ja) | 半導体材料の製造工程における露光条件の決定方法、及び半導体材料の製造装置 | |
| JP4851253B2 (ja) | 描画装置、及び描画装置におけるエラー検出方法 | |
| JP2008203635A (ja) | 描画方法および描画装置 | |
| US20200380089A1 (en) | Curvilinear mask models | |
| JP4671661B2 (ja) | 露光装置および露光方法 | |
| JP2002151387A (ja) | 電子ビーム描画方法 | |
| KR20220077678A (ko) | 기계 학습을 이용한 반도체 공정을 위한 레이아웃의 보정 방법 및 장치 | |
| US7295288B1 (en) | Systems and methods of imprint lithography with adjustable mask | |
| JPH1167634A (ja) | 荷電粒子線描画用データ作成方法並びに描画用パターンデータ作成プログラムを記録した記録媒体 | |
| JP2008225187A (ja) | データ作成方法およびデータ作成装置 | |
| JP2011044666A (ja) | パターン描画方法、パターン描画装置および描画データ生成方法 | |
| JP2008070528A (ja) | パターンデータの処理システム、パターンデータの処理方法、及びパターンデータの処理プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061214 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061214 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091001 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091020 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091117 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121127 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4413036 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131127 Year of fee payment: 4 |
|
| EXPY | Cancellation because of completion of term |