JP4378985B2 - 位置検出器、及び、精密機器 - Google Patents
位置検出器、及び、精密機器 Download PDFInfo
- Publication number
- JP4378985B2 JP4378985B2 JP2003088361A JP2003088361A JP4378985B2 JP 4378985 B2 JP4378985 B2 JP 4378985B2 JP 2003088361 A JP2003088361 A JP 2003088361A JP 2003088361 A JP2003088361 A JP 2003088361A JP 4378985 B2 JP4378985 B2 JP 4378985B2
- Authority
- JP
- Japan
- Prior art keywords
- contact
- arm
- arm portion
- position detector
- elastic deformation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Description
【発明の属する技術分野】
本発明は、精密機器などの内部において、移動する部材の位置検出を行う位置検出器に関するものである。
【0002】
【従来の技術】
ミラーアップ/ダウンするような一眼レフカメラにおいて、ミラーの位置状態を知ることは、非常に大切である。また、絞り駆動、シャッタチャージ駆動についても同様なことが言える。
例えば、特許文献1には、これらの位置情報を検出する手法として、各動作をさせるための歯車に電気的接点を設けて位置情報を電気的信号に置き換えて検知する手法が開示されている。
【0003】
このような位置検出器は、単純な位置情報を判別するスイッチ(電気的接点機構)であることが多く、製品形態の関係上、機構部品で作られた小さな構造であった。
この電気的接点機構は、電気的通電・非通電が位置によって判別可能な仕組みになっている。接点の一方は、板ばねなどの弾性変形可能な形態であり、もう一方は、フレキシブルプリント基板、又は、リジットプリント基板を用いる場合が多い。
【0004】
従来から、このような構成により、フレキシブルプリント基板、又は、リジットプリント基板に形成された導通パターンを板ばね状の接点ブラシを接触させて通電判別して位置検出を行っていた。
図10は、従来の位置検出器に用いられている接点ブラシを示す図である。
従来の接点ブラシ234は、腕部234aの先端部に接点234bを有している。
従来の機構部品のスイッチは、接触部分に押し付ける力により反力を発生し、動作する事で摩擦力も発生する。これにより駆動部分に負荷をかけてしまう。それを回避するためには、スイッチの押し付け力を小さくする片持ちの弾性部品を使う方法が用いられていた。
【0005】
【特許文献1】
特開2001−305647号公報(第4頁、第3,4図)
【0006】
【発明が解決しようとする課題】
しかし、従来の接点ブラシは、片持ちばねであるため部品形状としての強度が低く、組立て作業中、調整作業中等に弾性部分(特に腕部234a)の応力限界を超える曲げを発生してしまう場合が多くあり、部品としての強度を確保するのが困難であるという問題があった。
【0007】
また、接点ブラシの取り付け位置を導電パターンに対して決定する場合は、接点ブラシの自然な状態から力をかけて変形させた状態で接触位置を決めるが、変形後の接触位置を正確に決めるのが困難であった。
図11は、従来の接点ブラシの導電パターンとの接触による変形を示す図である。図11では、実線が非接触状態を示し、2点鎖線が接触状態を示している。
非接触状態から接触状態とした場合、接点234bは、接点234b’に示す位置となり、変形前の位置からX軸方向にΔd変形する。この接点の位置が変化することにより、検出位置に設計値から誤差が生じ、問題を起こす場合もあった。これを管理するために、片持ちの接点ブラシと、導電パターンとの距離(間隔)、弾性変形形状の把握をしたうえで設計することが大切であり、予想以上に設計に時間を費やしてしまうという問題があった。
【0008】
さらに、部品の出来映えによって、接点ブラシが撓む量が変わってしまうことがあり、設計時に変形形状を検討しただけでは、実際の組み立て時に位置がずれてしまうという問題があった。
【0009】
さらにまた、高速で駆動させると、順方向・逆方向で弾性変形の形状が変化して、接触条件が変化する。従来のような接点ブラシでは、導電パターンの凹凸により、弾性変形部材の微小な振動を引き起こす原因となったり、疲労破壊にもつながったりするという問題があった。
【0010】
本発明の課題は、組立て時などに不用意に変形しにくく、使用中の耐久性も高く、また、使用時に弾性変形による検出位置のずれを生じず安定して動作することができる位置検出器を提供することである。
【0011】
【課題を解決するための手段】
本発明は、以下のような解決手段により、前記課題を解決する。なお、理解を容易にするために、本発明の実施形態に対応する符号を付して説明するが、これに限定されるものではない。すなわち、請求項1の発明は、導通パターン(151a,151b)を有した基板(151)と前記基板に対して相対的に移動する相対移動部材(133)との相対的な位置を検出する位置検出器であって、前記相対移動部材と一体となって移動し、前記相対移動部材に対して実質的に両端支持されて弾性変形可能な第1弾性変形部及び第2弾性変形部(134a,334a)と、前記第1弾性変形部及び前記第2弾性変形部のそれぞれの略中央部に配置され、前記弾性変形により前記導通パターンに対して略直交する方向に変位可能なように支持されて前記導通パターンと接触する接点(134b,334b)とを備え、前記第1弾性変形部及び前記第2弾性変形部のそれぞれは、前記相対移動部材に固定される第1の固定部と、前記第1の固定部を支点として前記接点を可動端として、前記相対移動部材の相対的な回転の接線方向と略平行な第1接線方向に延在する第1の腕部と、前記相対移動部材の前記第1の固定部とは異なる位置に固定される第2の固定部と、前記第2の固定部を支点として前記接点を可動端として、前記第1接線方向とは反対の方向である第2接線方向に延在する第2の腕部とを有することを特徴とする位置検出器である。
【0013】
請求項2の発明は、請求項1に記載された位置検出器において、前記第1の腕部(134e)が撓むことにより前記接点(134b)に作用する付勢力は、前記第2の腕部(134f)が撓むことにより前記接点に作用する付勢力と略等しいこと、を特徴とする位置検出器である。
【0014】
請求項3の発明は、請求項1又は請求項2に記載された位置検出器において、前記第1の腕部(134e)と前記第2の腕部(134f)とは、前記接点(134b)を挟んで略対称に設けられていること、を特徴とする位置検出器である。
【0015】
請求項4の発明は、請求項1に記載された位置検出器において、前記第1弾性変形部及び前記第2弾性変形部(334a)のそれぞれは、前記相対移動部材(133)に固定される第1の固定部(334c)と、前記第1の固定部を支点として延在する第1の腕部(334e)と、前記第1の腕部の可動端(334g)を支点とし、前記第1の腕部が延在する向きに対して略折り返す方向に延在し、前記接点(334b)を可動端とする第3の腕部(334i)と、前記相対移動部材の前記第1の固定部とは異なる位置に固定される第2の固定部(334d)と、前記第2の固定部を支点として延在する第2の腕部(334f)と、前記第2の腕部の可動端(334h)を支点とし、前記第2の腕部が延在する向きに対して略折り返す方向に延在し、前記接点を可動端とする第4の腕部(334j)と、を有すること、を特徴とする位置検出器である。
【0016】
請求項5の発明は、請求項4に記載された位置検出器において、前記第1の腕部(334e)及び前記第3の腕部(334i)が撓むことにより前記接点(334b)に作用する付勢力は、前記第2の腕部(334f)及び前記第4の腕部(334j)が撓むことにより前記接点に作用する付勢力と略等しいこと、を特徴とする位置検出器である。
【0017】
請求項6の発明は、請求項4又は請求項5に記載された位置検出器において、前記第1の腕部(334e)及び前記第3の腕部(334i)と、前記第2の腕部(334f)及び前記第4の腕部(334j)とは、前記接点(334b)を挟んで略対称に設けられていること、を特徴とする位置検出器である。
請求項7の発明は、請求項1から請求項6までの何れか1項に記載された位置検出器を含むことを特徴とする精密機器である。
【0018】
【発明の実施の形態】
以下、図面等を参照しながら、本発明の実施の形態について、更に詳しく説明する。
(第1実施形態)
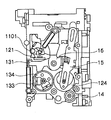
図1は、本発明による位置検出器の第1実施形態を備えるカメラのシャッタ/ミラー機構を示す図である。
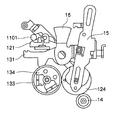
図2は、シャッタ/ミラー機構の主要部を抜き出して示した図である。
図3は、図2と同じものを反対側から示した図である。
クイックリターンミラー1101は、ミラー駆動レバー121が歯車124の側面にあるカムによって移動されることによって動作する。シャッタのチャージ動作は、シャッタチャージレバー131が歯車133の側面にあるカムによって移動されることによって行われる。絞りレバー16は、歯車124の側面にあるカムにより絞りレバー駆動部品15を移動させることによって動作する。これらの駆動は、不図示の電動モータを回すことにより回転駆動力を歯車14に伝え、歯車124、歯車133を介して行われる。
【0019】
ここで、クイックリターンミラー1101,絞りレバー16,シャッタチャージレバー131の位置を知ることが必要であり、これらの位置検出は、歯車133に固定されている接点ブラシ134とフレキシブルプリント基板151(図5参照)とからなる位置検出器により行われる。
【0020】
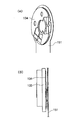
図4は、本実施形態における接点ブラシ134を示す図である。
接点ブラシ134は、フレキシブルプリント基板151から見て相対移動部材である歯車133に対して実質的に両端支持されて弾性変形可能な弾性変形部134aを2ヵ所有している。また、弾性変形部134aの中央部には、接点134bが設けられている。
【0021】
より詳しく説明すると、接点ブラシ134が歯車133に固定される部分に第1の固定部134c,第2の固定部134dが設けられている。さらに、第1の固定部134c,第2の固定部134dを支点(固定端)として、接点134bを可動端として延在する第1の腕部134e,第2の腕部134fが設けられている。
接点ブラシ134の弾性変形部134aの両端は、固定されているので、部品強度が十分に確保できている。したがって、作業中に誤って接点134b等を触ってしまったとしても、簡単に曲げてしまったりすることがない。
また、第1の腕部134eと第2の腕部134fとは、接点134bを挟んで略対称に設けられている。
【0022】
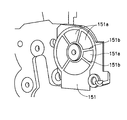
図5は、フレキシブルプリント基板151を示す図である。
フレキシブルプリント基板151は、複数の導電部151a及び非導電部151bを有する導電パターンを有している。
【0023】
図6は、接点134bがフレキシブルプリント基板151に接触し、位置検出器として機能している状態を示す図である。図6(a)は、斜視図を示し、図6(b)は、歯車133と共に示した側面図である。
接点ブラシ134は、歯車133に固定され、接点134bがフレキシブルプリント基板151に接触して挟まれることにより所定量撓んで、接点134bがフレキシブルプリント基板151に力をかけた状態で使用される。歯車133が回転すると、接点ブラシ134が歯車133の回転とともに動作し、フレキシブルプリント基板151の導電パターンにより接点ブラシ134の位置から通電/非通電状態を判別することにより、位置検出を行う。
【0024】
図7は、接点ブラシ134の非接触状態と接触状態とを示す図である。図7では、非接触状態を実線により示し、接触状態を2点鎖線により示している。
接点ブラシ134では、両端を固定する部分から接点134bの位置まで、すなわち、接点134bの両側に設けられている第1の腕部134e,第2の腕部134fの長さL1とL2とが直線距離でほぼ等しくなっている(L1≒L2)。よって、第1の腕部134eが撓むことにより接点134bに作用する付勢力は、第2の腕部134fが撓むことにより接点に作用する付勢力と略等しくなり、接点ブラシ134が接触状態(2点鎖線)となり撓んだ状態となっても、接点134bの位置は、図中のX方向において全く位置変動がない。
【0025】
したがって、接点134bと導電パターンとの位置ずれが生じることもなく、常に正確な位置検出を安定して行うことができる。
また、設計時及び試作時に接点134bの位置ずれを検討する必要もなく、設計及び試作工程を短縮することができる。
さらに、歯車133の正転/逆転によらず、いずれの方向に回転しても、安定した位置検出を行うことができる。
【0026】
(第2実施形態)
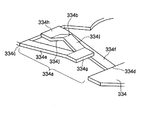
図8は、第2実施形態の主要部を示す図である。
第2実施形態は、第1実施形態における弾性変形部134aの形態のみを変更した形態であるので、第1実施形態と同様の機能を果たす部分には、同一の符号を付して、重複する説明を適宜省略する。
本実施形態における接点ブラシ334は、第1実施形態と同様に、弾性変形可能な弾性変形部334aを2ヶ所有しており、その中央部に接点334bが設けられている。弾性変形部334aの各部をさらに細かく分けると、第1の固定部334c,第2の固定部334d,第1の腕部334e,第2の腕部334f,第1の折り返し部334g,第2の折り返し部334h,第3の腕部334i,第4の腕部334jが設けられている。
【0027】
第1の固定部334cは、接点ブラシ334が歯車133に固定される部分に設けられている。
第2の固定部334dは、接点334bを挟んで第1の固定部334cの反対側にあって、接点ブラシ334が歯車133に固定される部分に設けられている。
第1の腕部334e,第2の腕部334fは、第1の固定部334c,第2の固定部334dを支点として延在し、接触時に撓む部分である。
【0028】
第1の折り返し部334g,第2の折り返し部334hは、第1の腕部334e,第2の腕部334fから見ると可動端であり、後述の第3の腕部334i,第4の腕部334jから見ると支点(固定端)となる部分である。
【0029】
第3の腕部334i,第4の腕部334jは、第1の腕部334e,第2の腕部334fの可動端である第1の折り返し部334g,第2の折り返し部334hを支点とし、第1の腕部334e,第2の腕部334fが延在する向きに対して略折り返す方向に延在し、接点334bを可動端とする部分である。この第3の腕部334i,第4の腕部334jは、第1の腕部334e,第2の腕部334fと同様に、接触時に撓む部分である。
【0030】
図9は、接点ブラシ334の非接触状態と接触状態とを示す図である。図9では、非接触状態を実線により示し、接触状態を2点鎖線により示している。
第1の腕部334e,第2の腕部334fの長さをそれぞれLa,Lcとし、第3の腕部334i,第4の腕部334jの長さをそれぞれLb,Ldとすると、これらの間には、以下の関係が必要である。
La+Lb=Lc+Ld
この関係によって、第1の腕部334e及び第3の腕部334iが撓むことにより接点334bに作用する付勢力は、第2の腕部334f及び第4の腕部334jが撓むことにより接点334bに作用する付勢力と略等しくなる。
【0031】
また、接点334bは、第1の固定部334cと第2の固定部334dとを結ぶ中央となるように配置されているので、図中のL3とL4とには、以下の関係がある。
L3=L4
すなわち、第1の腕部334e及び第3の腕部334iと、第2の腕部334f及び第4の腕部334jとは、接点334bを挟んで略対称に設けられていることとなり、簡単な構成により、接点334bの位置がずれてしまうことを防止できる。
【0032】
本実施形態における接点ブラシ334では、第1の腕部334e,第2の腕部334fと、第3の腕部334i,第4の腕部334jを折り返す形態で設けているので、接点ブラシ334のサイズを大型化することなく、ばねとして撓む長さが第1実施形態における接点ブラシ134よりも長くなっている。
したがって、接点334bにかかる反力を減少することができる。
また、弾性変形部334a全体のばね定数も小さくすることができるので、僅かな撓み量であっても接触力量が安定し、より確実に位置検出を行うことができる。
さらに、接点ブラシ334の部品としての強度も増加し、多少触れただけでは変形することもなく、取り扱いを容易に行うことができる。
さらにまた、上述の撓み量を少なくすることができることに加えて、本実施形態における接点334b付近は、従来の接点234b付近、及び、第1実施形態における接点134b付近よりも変形量が大きくなる。したがって、接点ブラシ334全体の変位量を少なくすることができる。よって、接触状態における歯車133から弾性変形部までの距離は、図11(従来)におけるTa、図7(第1実施形態)におけるTbが歯車133側に食い込んでいる状態であるのに対して、本実施形態におけるTc(図9参照)は、十分な余裕を持つことができている。このように、弾性変形部334aが歯車133側へ突出しにくくなり、この突出する部分を歯車133の部品形状により逃げたりする必要もなくすことができる。
【0033】
(変形形態)
以上説明した実施形態に限定されることなく、種々の変形や変更が可能であって、それらも本発明の均等の範囲内である。
各実施形態において、相対移動部材と接点ブラシが別部材により形成されている例を示したが、これに限らず、例えば、一体の部材であって、接点ブラシ自身が相対移動部材であってもよい。
【0034】
また、各実施形態において、カメラのシャッタ/ミラー機構に使用する位置検出器を例に挙げて説明したが、これに限らず、カメラ内の他の部位に用いてもよいし、カメラ以外の各種機器に用いてもよい。
【0035】
【発明の効果】
以上詳しく説明したように、本発明によれば、以下の効果を奏することができる。
(1)相対移動部材に対して実質的に両端支持されて弾性変形可能な弾性変形部と、弾性変形部の中央部に配置され、弾性変形により導通パターンに対して略直交する方向に変位可能なように支持されて導通パターンと接触する接点とを備えるので、弾性変形部を含む部品の強度を増すことができる。また、弾性変形を伴っても、接点の導通パターンに対するずれが発生しないので、設計時及び試作時などにこのずれを検討しなくとも、正確な位置検出を行うことができる。さらに、順方向駆動/逆方向駆動においても安定した位置検出を行うことができる。
【0036】
(2)弾性変形部は、相対移動部材に固定される第1の固定部と、第1の固定部を支点として接点を可動端として延在する第1の腕部と、相対移動部材の第1の固定部とは異なる位置に固定される第2の固定部と、第2の固定部を支点として接点を可動端として延在する第2の腕部とを有するので、簡単な構成であっても、弾性変形を行う部材の強度を高くすることができ、また、正確な位置検出を行うことができる。
【0037】
(3)第1の腕部が撓むことにより接点に作用する付勢力は、第2の腕部が撓むことにより接点に作用する付勢力と略等しいので、弾性変形により接点の位置がずれてしまうことを防止できる。
【0038】
(4)第1の腕部と第2の腕部とは、接点を挟んで略対称に設けられているので、簡単な構成により、接点の位置がずれてしまうことを防止できる。
【0039】
(5)弾性変形部は、相対移動部材に固定される第1の固定部と、第1の固定部を支点として延在する第1の腕部と、第1の腕部の可動端を支点とし、第1の腕部が延在する向きに対して略折り返す方向に延在し、接点を可動端とする第3の腕部と、相対移動部材の第1の固定部とは異なる位置に固定される第2の固定部と、第2の固定部を支点として延在する第2の腕部と、第2の腕部の可動端を支点とし、第2の腕部が延在する向きに対して略折り返す方向に延在し、接点を可動端とする第4の腕部とを有するので、全体のサイズを大型化することなく弾性変形する部分の長さを長く確保することができる。したがって、接点に作用する付勢力を小さくすることができ、使用中の耐久性を高くすることができる。
【0040】
(6)第1の腕部及び第3の腕部が撓むことにより接点に作用する付勢力は、第2の腕部及び第4の腕部が撓むことにより接点に作用する付勢力と略等しいので、弾性変形により接点の位置がずれてしまうことを防止できる。
【0041】
(7)第1の腕部及び第3の腕部と、第2の腕部及び第4の腕部とは、接点を挟んで略対称に設けられているので、簡単な構成により、接点の位置がずれてしまうことを防止できる。
【図面の簡単な説明】
【図1】本発明による位置検出器の第1実施形態を備えるカメラのシャッタ/ミラー機構を示す図である。
【図2】シャッタ/ミラー機構の主要部を抜き出して示した図である。
【図3】図2と同じものを反対側から示した図である。
【図4】本実施形態における接点ブラシ134を示す図である。
【図5】フレキシブルプリント基板151を示す図である。
【図6】接点134bがフレキシブルプリント基板151に接触し、位置検出器として機能している状態を示す図である。
【図7】接点ブラシ134の非接触状態と接触状態とを示す図である。
【図8】第2実施形態の主要部を示す図である。
【図9】接点ブラシ334の非接触状態と接触状態とを示す図である。
【図10】従来の位置検出器に用いられている接点ブラシを示す図である。
【図11】従来の接点ブラシの導電パターンとの接触による変形を示す図である。
【符号の説明】
14 歯車
15 絞りレバー駆動部品
16 絞りレバー
121 ミラー駆動レバー
124 歯車
131 シャッタチャージレバー
133 歯車
134 接点ブラシ
134a 弾性変形部
134b 接点
134c 第1の固定部
134d 第2の固定部
134e 第1の腕部
134f 第2の腕部
151 フレキシブルプリント基板
151a 導電部
151b 非導電部
334 接点ブラシ
334a 弾性変形部
334b 接点
334c 第1の固定部
334d 第2の固定部
334e 第1の腕部
334f 第2の腕部
334g 第1の折り返し部
334h 第2の折り返し部
334i 第3の腕部
334j 第4の腕部
1101 クイックリターンミラー
Claims (7)
- 導通パターンを有した基板と前記基板に対して相対的に回転移動する相対移動部材との相対的な位置を検出する位置検出器であって、
前記相対移動部材と一体となって移動し、前記相対移動部材に対して実質的に両端支持されて弾性変形可能な第1弾性変形部及び第2弾性変形部と、
前記第1弾性変形部及び前記第2弾性変形部のそれぞれの略中央部に配置され、前記弾性変形により前記導通パターンに対して略直交する方向に変位可能なように支持されて前記導通パターンと接触する接点とを備え、
前記第1弾性変形部及び前記第2弾性変形部のそれぞれは、前記相対移動部材に固定される第1の固定部と、
前記第1の固定部を支点として前記接点を可動端として、前記相対移動部材の相対的な回転の接線方向と略平行な第1接線方向に延在する第1の腕部と、
前記相対移動部材の前記第1の固定部とは異なる位置に固定される第2の固定部と、
前記第2の固定部を支点として前記接点を可動端として、前記第1接線方向とは反対の方向である第2接線方向に延在する第2の腕部とを有することを特徴とする位置検出器。 - 請求項1に記載された位置検出器において、
前記第1の腕部が撓むことにより前記接点に作用する付勢力は、前記第2の腕部が撓むことにより前記接点に作用する付勢力と略等しいこと、
を特徴とする位置検出器。 - 請求項1又は請求項2に記載された位置検出器において、
前記第1の腕部と前記第2の腕部とは、前記接点を挟んで略対称に設けられていること、
を特徴とする位置検出器。 - 請求項1に記載された位置検出器において、
前記第1弾性変形部及び前記第2弾性変形部のそれぞれは、前記相対移動部材に固定される第1の固定部と、
前記第1の固定部を支点として延在する第1の腕部と、
前記第1の腕部の可動端を支点とし、前記第1の腕部が延在する向きに対して略折り返す方向に延在し、前記接点を可動端とする第3の腕部と、
前記相対移動部材の前記第1の固定部とは異なる位置に固定される第2の固定部と、
前記第2の固定部を支点として延在する第2の腕部と、
前記第2の腕部の可動端を支点とし、前記第2の腕部が延在する向きに対して略折り返す方向に延在し、前記接点を可動端とする第4の腕部と、
を有すること、
を特徴とする位置検出器。 - 請求項4に記載された位置検出器において、
前記第1の腕部及び前記第3の腕部が撓むことにより前記接点に作用する付勢力は、前記第2の腕部及び前記第4の腕部が撓むことにより前記接点に作用する付勢力と略等しいこと、
を特徴とする位置検出器。 - 請求項4又は請求項5に記載された位置検出器において、
前記第1の腕部及び前記第3の腕部と、前記第2の腕部及び前記第4の腕部とは、前記接点を挟んで略対称に設けられていること、
を特徴とする位置検出器。 - 請求項1から請求項6までの何れか1項に記載された位置検出器を含むことを特徴とする精密機器。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003088361A JP4378985B2 (ja) | 2003-03-27 | 2003-03-27 | 位置検出器、及び、精密機器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003088361A JP4378985B2 (ja) | 2003-03-27 | 2003-03-27 | 位置検出器、及び、精密機器 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004294313A JP2004294313A (ja) | 2004-10-21 |
| JP4378985B2 true JP4378985B2 (ja) | 2009-12-09 |
Family
ID=33402511
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003088361A Expired - Fee Related JP4378985B2 (ja) | 2003-03-27 | 2003-03-27 | 位置検出器、及び、精密機器 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4378985B2 (ja) |
-
2003
- 2003-03-27 JP JP2003088361A patent/JP4378985B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004294313A (ja) | 2004-10-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3896745B2 (ja) | 駆動装置 | |
| JP4576214B2 (ja) | 超音波モータおよびレンズ鏡筒 | |
| JP4700555B2 (ja) | 像ぶれ補正装置 | |
| JP5765993B2 (ja) | 振動型駆動装置 | |
| TWI259628B (en) | Switch exhibiting non-unidirectional displacement | |
| JP2006177971A (ja) | 電気デバイスの検査方法 | |
| JP2015005504A (ja) | コネクタ | |
| TWI424623B (zh) | 連接器 | |
| WO2021100449A1 (ja) | ソケットおよび工具 | |
| JP4378985B2 (ja) | 位置検出器、及び、精密機器 | |
| JP2011018413A (ja) | 磁気ヘッドスライダ係止部材 | |
| JP2025126332A (ja) | 振動型アクチュエータ及び撮像装置 | |
| JP4652784B2 (ja) | 超音波モータ | |
| JP4667839B2 (ja) | 超音波モータ | |
| US8810238B2 (en) | Magnetic encoder | |
| EP1564878A2 (en) | Electrostatic actuator | |
| US7113697B2 (en) | Displacement detection device and lens barrel | |
| JP4078484B2 (ja) | 変位検出装置及びそれを備えたレンズ鏡筒 | |
| JP5295995B2 (ja) | 磁気ヘッドスライダ係止部材 | |
| JP2004268147A (ja) | 把持装置 | |
| CN1249855C (zh) | 恒定作用力的设备和方法 | |
| JP4604604B2 (ja) | 変位検出装置 | |
| JP4667838B2 (ja) | 超音波モータ | |
| JP3809624B2 (ja) | レバー変位拡大機構 | |
| JP5408041B2 (ja) | 位置検出センサー |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060306 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080529 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080603 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080804 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090609 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090810 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090825 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090907 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121002 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4378985 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121002 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151002 Year of fee payment: 6 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |