JP4372877B2 - 光学式変位センサ - Google Patents
光学式変位センサ Download PDFInfo
- Publication number
- JP4372877B2 JP4372877B2 JP00641199A JP641199A JP4372877B2 JP 4372877 B2 JP4372877 B2 JP 4372877B2 JP 00641199 A JP00641199 A JP 00641199A JP 641199 A JP641199 A JP 641199A JP 4372877 B2 JP4372877 B2 JP 4372877B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- scale
- light source
- light receiving
- diffraction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





















Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Optical Transform (AREA)
Description
【発明の属する技術分野】
本発明は、光学式変位センサに係り、特に、精密メカニズムの変位量を検出する光学式変位センサに関する。
【0002】
【従来の技術】
まず、第1の従来技術として、代表的な変位センサであるエンコーダの構成全体に関する従来技術について説明する。
【0003】
図19は、レンズなどの光学部品の組立を必要としない小型・低コストなエンコーダの一例としてコヒーレント光源と回折格子スケールを用いた従来技術によるレーザエンコーダを示す構成図である。
【0004】
このコヒーレント光源と回折格子スケールを用いたレーザエンコーダについては、例えば、「コパル:ロータリエンコーダカタログ」に記載されている。
【0005】
すなわち、このレーザエンコーダは、図19に示すように、コヒーレント光源1である半導体レーザから出射したレーザビームを透過型の回折格子スケール2に照射し、これにより生成される回折干渉パターン13の特定部分が一定間隔P2の透過スリット53を通過して光検出器3により検出されるように構成されている。
【0006】
図20は、図19のレーザエンコーダを用いた変位センサをさらに詳しく説明するための動作説明図である。
【0007】
この図20により、従来の変位センサの動作について、以下に、説明する。
【0008】
図20の(a)に示すように、各構成パラメータを以下のように定義する。
【0009】
z1:光源とスケール上の回折格子を形成した面の間隔、
z2:スケール上の回折格子を形成した面と光検出器の受光面の間隔、
p1:スケール上の回折格子のピッチ、
p2:光検出器の受光面上の回折干渉パターンのピッチ、
θx:スケール上の回折格子のピッチ方向に対する光源から出射される光ビームの拡がり角、
θy:上記θxに対して垂直方向の光源から出射される光ビームの拡がり角、(但し、光ビームの拡がり角は光ビーム強度がピークとなる方向に対して1/2となる一対の境界線6のなす角を示す。)
尚、「スケール上の回折格子のピッチ」とは、スケール上に形成される光学特性が変調されたパターンの空間的な周期を意味する。
【0010】
また、「光検出器の受光面上の回折干渉パターンのピッチ」とは、受光面上に生成された回折干渉パターンの強度分布の空間的な周期を意味する。
【0011】
ところで、光の回折理論によると、上記のように定義されるz1,z2が以下の(1)式に示す関係を満たすような特定の関係にあるときには、スケールの回折格子パターンと相似な強度パターンが光検出器の受光面上に生成される。
【0012】
(1/z1)+(1/z2)=λ/kp12 …(1)
ここで、λは光源から出射される光ビームの波長、kは整数である。
【0013】
このときには、受光面上の回折干渉パターンのピッチp2は他の構成パラメータを用いて以下の(2)式に示すように表すことができる。
【0014】
p2=p1(z1+z2)/z1 …(2)
前記光源に対して前記スケールが回折格子のピッチ方向に変位すると、同じ空間周期を保った状態で回折干渉パターンの強度分布がスケールの変位する方向に移動する。
【0015】
従って、光検出器の受光エリア4の空間周期p20をp2と同じ値に設定すれば、スケールがピッチ方向にp1だけ移動する毎に光検出器から周期的な強度信号が得られるので、スケールのピッチ方向の変位量を検出することができる。
【0016】
次に、第2の従来技術として、面発光レーザ光源を用いた小型変位センサに関する従来技術を説明する。
【0017】
この小型変位センサは、面発光レーザ光源を用いた複合共振器型の干渉センサであり、本発明者らの論文(「面発光レーザを用いた超小型センサ」:山本英二、機会学会第75期通常総会講演会資料集(VI)、1998年、pp.682−689)に記載さている。
【0018】
図21に示すように、この小型変位センサは、面発光レーザ光源10と外部ミラ−61が対向して複合共振器を構成していると共に、光検出器3に形成された受光エリア4で面発光レーザ光源10からの出力光を検出することにより、面発光レーザ光源10と外部ミラー61の距離Lの変化を検出することができる。
【0019】
この論文によると、距離Lが変化したときのセンサの出力特性は、構成上の多くのパラメータに依存するが、典型的な場合の試算例が、光源として、従来から一般的に使われてきた半導体レーザである端面出射型の半導体レーザを用いた場合(図22の(a))と、面発光レーザを用いた場合(図22の(b))とが対比して示されている。
【0020】
これによると、端面出射型の半導体レーザを光源とした場合には、光源と外部ミラーの距離Lが数10μm以上であれば、この距離Lが変動してもレーザ出力は殆ど変化しない。
【0021】
しかるに、面発光レーザを光源とする場合には、光源と外部ミラーの距離Lが数mm以上であっても距離Lが僅かに変動するだけで、レーザ出力が大きく変動することが示されている。
【0022】
さらに、この論文によると、光源として面発光レーザを用いた場合でも、対向する外部ミラーを傾けることにより、距離Lをある程度以上に大きくすれば、距離Lが変動してもレーザ出力は殆ど変化しないことが示されている。
【0023】
図22の(c)は、図22の(b)と同様な構成で、外部ミラーを0.5degだけ傾けた場合の特性が示されており、さらに傾斜させることにより距離Lが小さな場合でも距離Lの変動に対するレーザ出力の変動を抑えることができることがわかっている。
【0024】
【発明が解決しようとする課題】
上述した図19、図20に示した従来例において、センサの組立時の初期的な配置誤差や、スケールの変位による機械的な揺らぎにより、zl,z2が(1)式で示した関係式からずれた場合を考える。
【0025】
例えば、光源と受光面は固定されているが、これらの各々とスケールが図20の(a)に示すように、スケール2の位置からスケール22の位置にΔzだけずれた場合には、図20の(b)、図20の(c)に示すように受光面上の回折干渉パターンが乱れるだけでなく、受光面上の回折干渉パターンのピッチp2が (2)式に従って変化する。
【0026】
尚、「受光面上の回折干渉パターンが乱れる」とは、正確には、スケールの回折格子パターンと受光面上の回折干渉パターンの相似性が乱れることを指している。
【0027】
図19、図20に示した従来例の構成において、光源と光検出器の配置が固定されている通常の場合には、z1はz1+Δzに、z2はz2−Δzとなる。
【0028】
ここで、スケール面と受光面を平行に配置する場合を考える。
【0029】
今、Δzの配置ずれが発生したときに、受光面上に形成される干渉パターンのピッチがp2からp2´に変化するとすれば、以下の(3)式が成り立つ。
【0030】
p2´=p1(z1+Δz+z2−Δz)/(z1+Δz)
=p1(z1+z2)/(z1+Δz) …(3)
従って、光検出器の受光領域4をp2の周期に合わせて複数設定しておくと、光源ビームの主軸から離れた位置においては、受光領域の周期と回折干渉パターンの周期のずれが大きくなる。
【0031】
このため、図20の(d)、図20の(e)に示すように、光検出器からの出力信号Ipdの振幅が小さくなったり、回折干渉パターンが乱れたりする現象が生じるのを避けられない。
【0032】
例えば、z1=0.5mm、z2=0.5mm、Δz=−zl/10=0.05mmの場合を考えると、(3)式よりp2=20μm、p2´=22.2μmとなる。
【0033】
このため、受光エリアのピッチを設計通りp20=p2=20μmとしておいても、受光面上では光ビームの主軸からSx/2=4.5p2=90μmの場所では、4.5p2=4.0p2´となり、回折干渉パターンが1/2ピッチだけずれることになる。
【0034】
これにより、この場所にある受光エリアから出力される信号は逆相になってしまい、センサの出力振幅が低下してしまう。
【0035】
この場合、受光面上で回折干渉パターンが逆相になってしまう位置は、光源から見たときの見込み角θ=2ArcTan(4.5p2/(z1+z2))=10.3deg.となる。これを最大見込み角θmaxとすると、θmaxの1/2程度に相当する光エリアの分布幅Sxを設定し、さらには、コヒーレント光源のビーム拡がり角もθmax程度にすることが望ましい。
【0036】
ここで、受光エリアの分布幅Sxとは、前述の複数の受光領域が分布形成されている広がり全体を指している。
【0037】
すなわち、スケールの位置ずれやセンサの組立時のばらつきによる出力信号Ipdの振幅低下を抑制し、かつ、適切な受光レベルを得るためには、受光エリアの分布幅Sxを光ビームの主軸近傍に制限し、さらには、この分布幅に対応した光ビームの拡がり角を有するコヒーレント光源を利用することが有効である。
【0038】
しかるに、従来の構成のように光源に端面出射型の半導体レーザを用いる場合には、光ビームの拡がり角が非常に大きく(長軸方向でおよそ40deg.、単軸方向で20deg.程度)、上記のようなビーム拡がり角θmax=10deg程度のレーザビームを出射することは困難である。
【0039】
このため、θmax=10deg.より広がったレーザビームの大半はセンサの出力振幅を大きく低下させたり、受光レベルを低下させたりする原因となっていた。
【0040】
従って、上記のような観点から、光源から出力されるレーザビームの拡がり角を適切に設定することができるコヒーレント光源を光源に使ったセンサ構成が必要である。
【0041】
さらに、受光エリアを光ビームの主軸近傍に制限したとしても、出力信号Ipdの周期が変化することは避けられないので、結果としてスケールの変位量の絶対値測定に誤差を生じる。
【0042】
スケールの位置ずれΔzが発生したときに、出力信号Ipdの周期が変化することを抑えるためには、受光面上の回折干渉パターンの周期が変化しない構成が必要とされる。
【0043】
従来例における別の問題点は、レーザ光源から出射した光がスケールや光検出器の表面で反射され、レーザに帰還することにより、光強度の変化が起り、ひいては、出力信号に雑音が発生することである。
【0044】
前述の第2の従来技術に関する記述で説明したように、特に、光源が面発光レーザのようなビーム広がり角が小さなレーザである場合には、この対策が必須である。
【0045】
従って、これを抑制するためには、レーザ光の戻り光雑音を低減する構成が必要である。
【0046】
上述した従来技術の問題点や課題をまとめると、以下のようになる。
【0047】
まず、従来技術では、一般的な従来の半導体レーザを光源とするため、光ビームの拡がり角が非常に大きく(長軸方向でおよそ40deg.、単軸方向で20deg.程度)、かつ、自由に設定できないために、受光エリアの広がりを前述のように主軸近傍に制限すると、受光エリアに入射する光パワーが極端に低下し、信号のS/Nが低下してしまうという問題を解決することができない。
【0048】
本発明はこの点に着目し、光ビームの拡がり角を従来の半導体レーザ光源では実現不可能な所定の小さな角度以下に設定することができる構成を提供し、光源、スケール、受光素子の配置が最適配置からずれた場合でも、S/Nの良好な出力信号が得られる光学式変位センサを実現することを第1の課題とする。
【0049】
また、従来技術では、レーザ光源から出射した光ビームの主軸に対して、スケール面や光検出器の受光面が垂直に配置されているため、レ−ザ光源から出射した光がスケールや光検出器の表面で反射され、レーザに帰還して、雑音を引き起こすことが避けられない。
【0050】
本発明はこの点に着目し、上述のレーザ光が光源に帰還する現象を回避して、レーザ光の戻り光雑音がセンサの出力信号に重畳されるのを抑制することが可能な光学式変位センサを実現することを第2の課題とする。
【0051】
さらに、従来技術では、光源、スケール、受光素子の配置が設計値からずれた場合には、受光面上の回折干渉パターン周期やパターン位置が大きく変化し、ひいては、スケール変位に対する信号振幅の低下や周期の変化を抑制することができない。
【0052】
本発明はこの点に着目し、光源、スケール、受光素子の配置が設計値からずれた場合でも、受光面上の回折干渉パターン周期やパターン位置の変化を低減し、ひいては、スケール変位に対する信号振幅の低下や周期の変化を抑制することが可能な光学式変位センサを実現することを第3の課題とする。
【0053】
本発明は、上記の事情に鑑みてなされたもので、特に、上述した第1乃至第3の課題を解決し得る光学式変位センサを提供することを目的とする。
【0054】
【課題を解決するための手段】
本発明によると、上記第1の課題を解決するために、(1) 所定の形状を有する光ビームを出射する面発光レーザ光源と、前記面発光レーザ光源からの光ビームを横切るように変位し、かつ、前記光ビームによる回折干渉パターンを生成する所定周期の回折格子が形成されたスケールと、前記回折干渉パターンの所定部分を受光する光検出器とを有する光学式変位センサであって、前記面発光レーザ光源の光ビーム出射面と前記回折格子が形成された面との間隔をz1とし、前記回折格子が形成された面と前記光検出器の受光面との間隔をz2とし、前記スケール上の回折格子のピッチをp1とし、nを自然数としたとき、前記光検出器は、受光面上における前記回折干渉パターンのピッチ方向に
np1(z1+z2)/z1
の間隔で形成された複数の受光エリアにより構成される光強度検出手段を有し、
前記面発光レーザ光源の射出窓は、
前記回折干渉パターンのピッチ方向または該ピッチ方向と垂直な方向に対して、射出面上での射出光ビーム径が3μm以上となるように構成されており、且つ、
前記複数の受光エリアは、
前記回折干渉パターンのピッチ方向または該ピッチ方向と垂直な方向に対して、前記光ビームの拡がり幅の内側に配置されている
ことを特徴とする光学式変位センサが提供される。
【0055】
(対応する発明の実施の形態)
上記(1)の発明に関する実施の形態は、第1の実施の形態が対応する。
【0056】
上記(1)の発明の構成で用いられる面発光レーザとして、この実施の形態では垂直共振器型面発光レーザを中心に記載するが、端面出射型半導体レーザと光導波路や立ち上げミラーまたは、回折格子などを集積して構成される面発光レーザも含むものとする。
【0057】
この構成で、「回折干渉パターンを生成する所定周期の回折格子」とは、振幅あるいは位相などの光学特性の周期変調パターンを形成した回折格子を意味し、受光面上に回折干渉パターンを生成する反射型回折格子、透過型回折格子などのあらゆる回折格子を含むものとする。
【0058】
また、「複数の受光エリアにより構成される光強度検出手段」とは、受光面上における前記回折干渉パターンのピッチ方向にnpl(z1+z2)/z1の間隔で形成された複数の受光エリアの出力を加算して出力するように構成された光検出器を意味するが、特殊ケースとしては単一のエリアしか有していない場合も含まれるものとする。
【0059】
尚、各受光エリアの間隔を決めるnの値は、必ずしも全域に渡って一定である必要はない。
【0060】
また、「前記回折干渉パターンのピッチ方向にnpl(z1+z2)/zlの間隔で形成された複数の受光エリア」における数値条件npl(z1+z2)/z1については、多少これからずれてもセンサとしては機能するため、上記(1)の発明を実施する際において、数値条件np1(z1+z2)/z1から±30%程度のずれがあっても上記(1)の発明の実施範囲とみなすことにする。
【0061】
(作用)
上記(1)の発明の光学式変位センサによると、面発光レーザから出射されたレーザ光は、スケール上の回折格子により一定の周期p1(z1+z2)/z1をもった回折干渉パターンを光検出器上の受光面に生成する。
【0062】
ここで、光検出器の光強度検出手段を構成する受光エリアは、回折格子のピッチ方向にnpl(z1+z2)/zlの間隔で形成されているので、これらの各受光エリアでは受光面上の回折干渉パターンにおける特定の同じ位相部分だけを検出する。
【0063】
この回折干渉パターンはスケールが回折格子のピッチ方向にx1だけ変位すると、受光面上では、同じ方向にx2=x1(z1+z2)/z1だけ変位するため、スケールが回折格子のピッチ方向に1ピッチ変位する度に、光強度検出手段からは周期的な強度で変化する出力信号が得られる。
【0064】
次に、面発光レーザ光源の作用についてさらに詳しく説明する。
【0065】
面発光レーザの概略断面図の一例を図2の(a)に示し、図2の(a)中の−z方向から見た上面図を図2の(b)に示す。
【0066】
この図2の(a)に示す例では、面発光レーザは以下のような構成になっている。
【0067】
すなわち、N−GaAs基板42上に、n−AlGaAs/GaAs半導体多層ミラ−43、n−AlGaAsスペーサ層44、InGaAs量子井戸活性層45、p−AlGaAsスペーサ層46、p−AlGaAs/GaAs半導体多層ミラ−47が順に積層され、さらに、レーザ共振器以外の部分が表面からn−A1GaAsスペーサ層44に至る深さまで半絶縁性のGaAs電流ブロック層48で埋め込まれている。
【0068】
ここで、共振器の径をωa、レーザ光の出射窓径をωwとし、図2の(a)で表示する平面をxz平面、図2の(b)で表示する平面をxy平面で定義し、面発光レーザの出射面上での光ビームの広がり寸法をx方向、y方向に対して、各々ωox、ωoyとする。
【0069】
尚、本明細書における作用の説明においては、記述を簡略化するために、スケール上の回折格子のピッチ方向をx方向にした場合を仮定して説明する。
【0070】
また、この面発光レーザから出射する光ビームの主軸を5,この光ビームが主軸上の光強度の1/2になるビーム境界を曲線6で示す。
【0071】
また、図2の(a)に示すように、前述のビーム境界曲線6に対して、その遠方での接線を6´とし、光ビームの主軸に対して相対する接線6´のなす角をx方向、y方向についてそれぞれθx、θyとし、このθx、θyを光ビームの拡がり角と呼ぶことにする。
【0072】
面発光レーザにおいては、例えば、図2の(a)の場合は、素子の出射窓寸法を自由に設定することによりωox,woyの大きさを変化させれば、光ビームの回折現象のために、θx、θyを広範に設定可能である。
【0073】
図3は、面発光レーザの出射面上におけるビーム径とビーム拡がり角θの関係を実際に試作して評価した実験結果を示しており、広範なビーム拡がり角の設定が可能であることがわかる。
【0074】
また、3μm以上のビーム径の場合が、ビームの拡がりも小さく、良好な条件であることがわかる。
【0075】
ところで、出射面上におけるビーム径ωoは、概ね、共振器の径ωaとレーザの出射窓径ωwのいずれか小さい方の値とみなすことができる。
【0076】
従って、図2の(a)に示すようにωa>ωwの場合には、ビーム径ωoはほぼωwと見なせる。
【0077】
また、図4に示す別の面発光レーザのように、ωa<ωwの場合には、ビーム径ωoは、ほぼωaと見なせる。
【0078】
従って、上記(1)の発明によると、従来のエンコーダで使用されてきた端面出射型の半導体レーザ1の代わりに、面発光レーザ10を光源として用いてx方向の受光エリアの拡がりを光源の光ビーム主軸近傍に制限しても、面発光レーザのωoxを適切に設定することにより、この狭い受光エリアの拡がりに対応した光ビームの拡がり角を設定することができるため、光源から出力される光ビームを有効に使って、受光エリアに回折干渉パターンを生成する。
【0079】
これにより、光源、スケール、受光索子の配置が最適値からずれた場合でも、良好な信号振幅と良好なS/Nの出力信号を出力可能な光学式変位センサを実現する。
【0080】
また、センサを小型化するためには、回折格子のピッチと垂直な方向については光が回折干渉する必要がないため、できるだけ小さなビーム拡がり角が望ましい。
【0081】
逆に、スケール上の回折格子の欠陥やゴミに対して出力信号が影響されないようにするためには、できるだけ大きなビーム拡がり角が望ましい。
【0082】
このように、ωoyを適切に設定することにより、用途に応じた最適なy方向のビーム拡がり角を設定可能とする。
【0089】
また、本発明によると、上記第2の課題を解決するために、(2)前記面発光レーザ光源は、
前記光ビームの主軸が前記光ビームが照射される前記スケールの面の垂線に対して所定方向に傾斜するように、配置されていることを特徴とする上記(1)記載の光学式変位センサが提供される。
【0090】
(対応する発明の実施の形態)この(2)の発明に関する実施の形態は、第7の実施の形態が対応する。
【0091】
(作用)この(2)の発明によると、より高精度で信頼性の高いスケールの変位センシングを可能するため、レーザ光源から出射した光ビームの主軸に対して、スケール面や光検出器の受光面が傾斜して配置されていることにより、レーザ光源から出射した光がスケールや光検出器の表面で反射される光が、レーザに帰還する現象を回避し、レーザ光の戻り光雑音がセンサの出力信号に重畳されることを抑制する。
【0092】
【発明の実施の形態】
以下図面を参照して本発明の実施の形態について説明する。
【0093】
(第1の実施の形態)
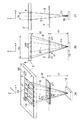
図1は、本発明による光学式変位センサの第1の実施の形態の概略的構成を示している。
【0094】
ここで、図1の(a)は第1の実施の形態の構成を示す斜視図であり、図1の(b)は図1の(a)に対応するxz面内の断面図、図1の(c)は図1の(a)に対応するyz面内の断面図である。
【0095】
すなわち、図1に示すように、面発光レーザ光源10とスケール2は、面発光レーザ光源10から出射した光ビームがスケール2に照射されるような位置関係で配置されるとともに、光検出器3は、前記光ビームがスケール2により回折干渉された干渉パターンの所定部分を受光するように置かれる。
【0096】
図1中のエリア4は、光検出器3が回折干渉パターンの所定部分を受光するように配置された受光エリアを示し、複数配置されている場合には、この受光エリア4が電気配線31により互いに接続され、出力パッド32からセンサ出力を取り出すことができる。
【0097】
図1中の点線5は、面発光レーザ光源10から出射された光ビームの主軸を示し、実線6は、この光ビームの広がりの境界線を示す。
【0098】
また、図1中の領域15は、スケール2の回折格子が形成された面における光ビームの広がり領域を、また、図1中の領域16は光検出器3の受光面における光ビームの広がり領域を示す。
【0099】
尚、前述したように、受光面上の回折干渉パターンの鮮明度を確保するためには、面発光レーザ光源10とスケール2、および、光検出器3の配置間隔は(1)式で示した関係を満たすようにすることが望ましい。
【0100】
次に、この発明の第1の実施の形態の作用について説明する。
【0101】
所定の光ビーム形状を有する面発光レーザ光源10から出射された光ビームは、回折格子が形成されたスケール2に照射される。
【0102】
また、前記スケール2は、前記面発光レーザ10の光ビームを横切るように変位する。
【0103】
前記スケール2により回折された光は、光検出器3の受光面上に回折干渉パターンを生成し、この光検出器3により前記回折干渉パターンの所定部分が検出される。
【0104】
前記スケール2が前記光ビームを横切る方向の変位に対応して、センサ信号が周期的に変化することにより、スケール2の変位量を検出することができる。
【0105】
尚、センサの出力信号を大きくしてS/Nのよい信号を得るために、図1に示すように、光検出器3上の受光エリア4は、スケール2の回折格子ピッチの方向と同じ方向に一定の空間周期p20を有するように複数のエリアを集積して形成されている。
【0106】
この受光エリアの空間周期p20は受光面上の回折干渉パターンの周期p2と同じにすることが望ましいため、p20はnpl(z1+z2)/zlとほぼ等しくなるように設定される。
【0107】
この発明の第1の実施の形態によると、図19における従来の半導体レーザ1の代わりに、面発光レーザ光源10を光源として用いるようにすることにより、受光エリア16の形成領域を面発光レーザ光源10からの光ビーム主軸近傍だけに制限しても、この受光エリア16の広がりに対応した光ビームの拡がり角を設定することができるため、面発光レーザ光源10からの光量を有効に使って回折干渉パターンを受光エリア16の形成領域に生成することができる。
【0108】
このように、回折干渉パターン形成領域を必要以上に広げないようにすることにより、面発光レーザ光源10、スケール2、受光素子3の配置が最適値からずれた場合でも、受光面上での回折干渉パターンと分布した受光エリア16のピッチずれの問題を低減できるため、良好な信号振幅と良好なS/Nの出力信号が出力可能な光学式変位センサを実現することができる。
【0109】
また、面発光レーザ光源10からの光ビーム広がり角をスケールピッチ方向 (x方向)とスケールピッチと垂直な方向(y方向)とで自由に設計することができるため、例えば、スケール2面上において、スケール2のピッチ方向には複数ピッチに渡る光ビーム広がり幅とし、これと垂直方向には狭い光ビーム広がり幅を設定することができるため、スケール2や光検出器3の大きさを必要最小限に抑えることが可能となり、センサの小型化や低コスト化を実現できる。
【0110】
尚、この発明の第1の実施の形態の各構成は、当然、各種の変形、変更が可能である。
【0111】
例えば、面発光レーザ光源10は、この実施の形態では垂直共振器型面発光レーザを中心に記載したが、端面出射型半導体レーザと光導波路や立ち上げミラーまたは、回折格子などを集積して構成される面発光レーザも含むものとする。
【0112】
また、「回折干渉パターンを生成する所定周期の回折格子」は、振幅あるいは位相などの光学特性の周期変調パターンを形成した回折格子を意味し、受光面上に回折干渉パターンを生成する反射型回折格子、透過型回折格子などのあらゆる回折格子を含むものとする。
【0113】
また、光源が面発光レーザ光源10であるため、スケール2は光検出器3の表面とレーザ光の主軸が垂直に配置された場合は、図22に示したようにスケールや受光面からの戻り光ノイズが大きい。
【0114】
これを低減するために、スケール2や光検出器3の受光面には反射を抑制する光学処理が施されるいることが望ましい。
【0115】
例えば、図5の(a)に示すように、スケール2や光検出器3の受光面に反射防止膜36を形成したり、図5の(b)に示すように、表面に細かな凹凸を作るなどした光散乱効果を持たせる処置部37を形成することが望ましい。
【0116】
尚、記述が冗長となるため、以後の記述においては省略するが、スケールや受光面に反射を抑制する光学処理に施すことについては、本発明の他の実施の形態においても同様に適用することができるものとする。(第2の実施の形態)
次に、本発明による光学式センサの第2の実施の形態を図6を参照して説明する。
【0117】
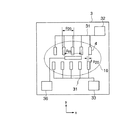
図6の(a)は第2の実施の形態による光学式センサを示す斜視図であり、図6の(b)は図6の(a)の光検出器3の受光面をスケール2の側から見たときの平面図である。
【0118】
尚、第1の実施の形態と共通する部分については、一部省略して説明するものとする。
【0119】
光検出器3上にはp2=npl(z1+z2)/zlの間隔で形成された複数の受光エリアにより構成される光強度検出手段とは別に、前記第2の光強度検出手段が受光面上における前記回折干渉パターンのピッチ方向にpm=mp1(z1+z2)/z1(但し、mは、nと異なる自然数)、の受光幅をもって形成され、これらの各々の光強度検出手段が図中の配線31を介して、出力取り出しパッド32とパッド36に接続されている。
【0120】
図6中の領域16は受光面上におけるレーザ光の拡がり領域を示しており、前述の複数の受光エリアや第2の光強度検出手段の受光エリアは、この領域16の中に形成されることが望ましい。
【0121】
次に、この発明の第2の実施の形態の作用を説明する。
【0122】
パッド32からは、スケール2がピッチ方向にP1だけ変位するごとに周期的な電気信号が出力される。
【0123】
パッド36からは、光源10からのレーザ出力に比例した電気信号が出力される。
【0124】
このパッド36から出力される電気信号は、光源10からのレーザ出力のモニタとして機能し、光源10を駆動する手段(図示せず)にフィードバックすることにより、例えば、周囲の環境温度や圧力が変化したり、戻り光によるレーザ出力の変動が発生するような場合に、レーザの出力変動を抑えることができる。
【0125】
これにより、センサを取り巻く環境が変化しても、安定な変位センシングが可能である。
【0126】
尚、第2の光強度検出手段を光検出器に集積することは、本発明の他の実施の形態においても適用することができる。
【0127】
(第3の実施の形態)
次に、本発明による光学式センサの第3の実施の形態を図7を参照して説明する。
【0128】
ここで、図7は、図6の(b)と同様に、図6の(a)における光検出器3の受光面をスケール2の側から見たときの平面図である。
【0129】
尚、第2の実施の形態と共通する部分については一部省略して説明するものとする。
【0130】
光検出器3上にはp2=np1(z1+z2)/z1、の間隔で形成された複数の受光エリアにより構成される光強度検出手段が二組形成され、これらは配線31を介して、出力パッド32,33に接続されている。
【0131】
上記二組の受光エリアは、受光面上で互いにx方向にδp20だけずらせて配置されている。
【0132】
次に、この発明の第3の実施の形態の作用を説明する。
【0133】
スケール2が方向に変位すると、出力パッド32,33からは位相の異なる電気信号が出力される。
【0134】
この出力パッド32,33から出力される電気信号の位相関係を利用して、スケール2の移動の向きの検出や、あるいは、信号の位相分割によるピッチp1以下の細かな変位量の検出などが可能となる。
【0135】
尚、図7において、複数の受光エリア群の空間的な配置ずれδp20をスケールのピッチ方向についてp2/4の奇数倍に設定すれば、各々の受光エリア群からの信号の位相差が1/4周期または3/4周期分だけずれるので、いわゆるエンコーダ信号のA相、B相の信号が得られる。
【0136】
尚、図7における2群の受光エリアを図8に示すように、P2/4の奇数倍だけずらせた別々の受光エリア群を交互に形成する構成とすることもできる。
【0137】
この場合には、光ビームが最適状態からy方向にずれたとしても、それぞれの受光エリア群からの平均的な出力レベル比が殆ど変化しないので、安定したセンシングが可能となる。
【0138】
(第4の実施の形態)
次に、本発明による光学式センサの第4の実施の形態を図9を参照して説明する。
【0139】
ここで、図9は、図6(b)と同様に、図6の(a)における光検出器3の受光面をスケール2の側から見たときの平面図である。
【0140】
尚、第2,3の実施の形態と共通する部分については、一部省略して説明するものとする。
【0141】
この第4の実施の形態では、4群の受光エリアをδp20だけ各々ずらせて、交互に形成している。
【0142】
尚、図9中の31および31´は、互いに交差して描かれているが、多層構造として各々を別な配線層で形成することなどにより、電気的には分離されているものとする。
【0143】
また、図9中の32,33,34,35は各々の受光エリア群からの電気信号の取り出しパッドである。
【0144】
また、通常、複数の受光エリア群の空間的な配置ずれδp20は、p2/4の奇数倍に設定されている。
【0145】
次に、この発明の第4の実施の形態の作用について説明する。
【0146】
パッド32,33,34,35からは互いに1/4周期だけ位相のずれた信号、いわゆるエンコーダ信号のA相、B相、反A相、反B相が出力される。
【0147】
A相と反A相、および、B相と反B相の信号とは、互いに逆位相の関係にあるため、A相と反A相の差信号、および、B相と反B相の差信号とを利用すれば周辺環境などからの迷光の影響のない安定な信号検出が可能となる。
【0148】
(第5の実施の形態)
次に、本発明による光学式センサの第5の実施の形態を図10を参照して説明する。
【0149】
尚、第1の実施の形態と共通する部分については、一部省略して説明するものとする。
【0150】
面発光レーザ光源10は2つの光ビームを異なる出射位置から放射し、これら2つの光ビームがともにスケール2に照射される。
【0151】
図10中の領域15,15´で囲まれた部分はスケール2上の光ビームの広がり領域を示しており、これら各々の領域にかかるように回折格子パターンが形成されている。
【0152】
さらに、領域15,15´に対応した回折干渉パターンは、主として、図の領域16,16´で示される部分に形成され、これら各々の回折干渉パターンの所定の空間位相部分を検出するように受光エリア群が形成されている。
【0153】
ここで、これら複数の受光エリア群のピッチ方向のずれ量δp20はp2/4の奇数倍だけずらせて形成することが望ましい。
【0154】
次に、この発明の第5の実施の形態の作用について説明する。
【0155】
図10に示したような構成により、出力パッド32,33からは、いわゆる、A相、B相の出力が得られる。
【0156】
本実施の形態には各種の変形が可能である。
【0157】
例えば、第2乃至4の実施の形態で示したように、レーザ光のモニ夕として第2の光検出手段を集積したり、また、受光エリア群を4組形成し、いわゆる、A相、B相、反A相、反B相の4相の出力が得られるようにすることもできる。
【0158】
(第6の実施の形態)
次に、本発明による光学式センサの第6の実施の形態を図11を参照して説明する。
【0159】
尚、第1の実施の形態と共通する部分については、一部省略して説明するものとする。
【0160】
スケール2には2群の回折格子パターンが形成されており、これら2群の回折格子の両方に面発光レーザ光源10から出射された光ビームが照射されるように配置されている。
【0161】
前記2群の回折格子は、それぞれ、回折干渉パターンを光検出器3の受光面上の異なる領域に生成し、光検出器3上に形成された2群の受光エリアはこれらの回折干渉パターンの特定の位相部分のみを選択的に受光するように形成されている。
【0162】
ここで、スケール2上の2群の回折格子のピッチ方向での互いの位置ずれをp1/4の奇数倍にすることが望ましい。
【0163】
次に、この発明の第6の実施の形態の作用について説明する。
【0164】
スケール2上の2群の回折格子のピッチ方向での互いの位置ずれをp1/4の奇数倍にすることにより、光検出器3の受光面上には、互いにピッチ方向にp2/4の奇数倍だけ異なる空間位相の回折干渉パターンが形成される(p2は受光面上での回折干渉パターンのピッチ)。
【0165】
これにより、光検出器3上に形成された2群の受光エリアをピッチ方向に対して位置ずれのないように設定しても、パッド32,33から互いに1/4周期の奇数倍の位相差をもった信号が得られる。
【0166】
従って、第2の実施の形態と同様にして、スケールの移動の向きの検出や、あるいは、信号の位相分割によるピッチp1以下の細かな変位量の検出などが可能となる。
【0167】
この構成では、面発光レーザ光源10上からの2つの光ビームの出射位置間隔を大きくすればするほど、これらに対応した回折干渉パターンが空間的に離れて形成できるため、例えば、スケール2上のビーム広がり領域15の回折干渉パターンが他方の回折干渉パターンを受光すべき受光エリア群4´でも僅かに検出されるような問題を抑制することができ、パッド32,33から出力される信号の干渉が少なくなるという利点がある。
【0168】
本実施の形態には各種の変形が可能である。
【0169】
例えば、第2乃至4の実施の形態で示したように、レーザ光のモニタとして第2の光検出手段を集積したり、また、受光エリア群を4組形成し、いわゆる、A相、B相、反A相、反B相の4相の出力が得られるようにすることもできる。
【0170】
(第7の実施の形態)
次に、本発明による光学式センサの第7の実施の形態を図12を参照して説明する。
【0171】
尚、第1乃至5の実施の形態と共通する部分については、一部省略して説明するものとする。
【0172】
第1の実施の形態と同様な構成において、面発光レーザ光源10から出射する光ビームの主軸をスケール2の表面の垂線に対して所定角度φだけ傾けて配置する。
【0173】
尚、後述するように、スケール2の面と光検出器3の受光面とは、互いに平行に配置することが望ましい。
【0174】
次に、この発明の第7の実施の形態の作用について説明する。
【0175】
光ビームの主軸をスケールに対して所定角度φだけ傾けて配置することにより、スケール2から面発光レーザ光源10に帰還する戻り光が低減されるため、スケール2と面発光レーザ光源10との光学的距離が僅かに変動するような場合でも、面発光レーザ光源10からの出力を安定に保つことができる。
【0176】
一例として、光源が面発光レーザである場合について、スケール2あるいは受光面に見立てたミラーと面発光レーザやLDの光ビーム出射面の距離が変化した場合について、光源出力の変動を試算した結果をφ=0の場合について図22の(b)に示すとともに、φ=0.5deg.の場合について図22の(c)に示す(この試算結果は前述の論文に記載したものである)。
【0177】
これによると、わずか0.5deg.傾けるだけでも、光源出力の変動を低減する効果が高く、さらに傾けることにより、光源とミラー(本発明ではスケールに相当)との間隔が小さくても、戻り光による光源の出力変動を抑えることができる。
【0178】
特に、前述したように光源が面発光レーザの場合には、この戻り光によるノイズ発生の低減対策としての効果が高い。
【0179】
また、スケ一ル面と受光面とを平行に配置する場合には、光源とスケール面、受光面を結ぶ直線上での相互の距離を各々、L1をL2とし、スケールに鉛直な線上における光源とスケール面、受光面の相互の距離を各々z1,z2とすると、前記(2)式から推測されるように、受光面上のあらゆる場所においてz1/z2=L1/L2となるため、受光面上における回折干渉パタ一ンピッチが一定となることが予測される。
【0180】
また、傾斜角が小さい場合には、前述のz1,z2を前述の(2)式を満たすように設定しておくことにより、ビーム広がり領域Sx内において前述の(1)式が近似的に成立すると考えられるので、領域Sx内の殆どの場所で回折干渉パターンの鮮明度もφ=0の場合とあまり変わらないことが予測される。
【0181】
これらを確認するために、例えば、以下の条件で傾斜角φがφ=0の場合およびφ=10deg.の場合について受光面上の回折干渉パターン試算した結果を各々図13の(a)および図13の(b)に比較して示す。
【0182】
[試算条件]
光波長λ=1μm
スケールの回折格子パターンピッチp1=10μm
光源とスケールの間隔zl=500μm
受光面とスケールの間隔z2=750pm
光ビームの拡がり角θx=7deg(x方向の強度分布が矩形であると仮定した場合)
スケール面と受光面の配置 平行
図13の(a)および図13の(b)より、スケールを傾斜させてもスケール面と受光面の配置を平行にすれば、x軸方向の回抄干渉パターンのピッチは変わらないし、また、傾斜角が10deg.程度では、受光面上の回折干渉パターンの周期性や鮮明度の低下も僅かであることがわかる。
【0183】
従って、レーザ光の主軸に対してスケール面を傾斜させても、p1とz1,z2が固定値であれば、x方向の回折干渉パターンの空間周期が一定となり、受光エリアの形成ピッチはx方向に対して一定の値でよくなり、受光エリアの設計が容易になる。
【0184】
また、同じ理由により、光検出器がスケールのピッチ方向に多少ずれて配置されても、回折干渉パターンと受光エリアのピッチずれの問題が発生しないという利点もある。
【0185】
但し、スケールと光源の間隔zlがΔzだけ変化すると、図12に示す配置関係では、受光面上における回折干渉パターンの位相(あるいはピークとなる位置)がx方向に移動する問題を内包している。
【0186】
本実施の形態では、各種の変形が可能である。
【0187】
本実施の形態において、光源やスケール、光検出器の構成や配置を第2乃至第6の実施の形態のようにして、それらの各々の実施の形態に対応して前述した付加的な効果をもたせることも可能である。
【0188】
また、光源から出射される光ビームをスケール面に対して傾斜させる手法は図12に示すように光源の向きを傾ける以外にも、例えば、図14に示すように光軸を曲げる光学部品(例えば、プリズムなど)を利用しても良い。
【0189】
(第8の実施の形態)
次に、本発明による光学式センサの第8の実施の形態を図15を参照して説明する。
【0190】
尚、第7の実施の形態と共通する部分については、一部省略して説明するものとする。
【0191】
第7の実施の形態では、光源ビームの主軸とスケール面の特定方向を垂直に配置する構成については規定していないが、この第8の実施の形態では、スケール2に形成された回折格子のピッチ方向とコヒーレント光を放射する光源1,10から放射される光ビームの主軸は垂直に配置されるとともに、前記スケールの回折格子が形成された面と前記光検出器の受光面を平行に配置する。
【0192】
従って、この第8の実施の形態では、スケール2に形成された回折格子のピッチ方向に垂直な方向とコヒーレント光を放射する光源から放射される光ビームの主軸が角度φだけ傾斜して配置される。
【0193】
次に、この発明の第8の実施の形態の作用について説明する。
【0194】
本実施の形態では、光ビームの主軸と回折格子のピッチ方向が垂直に配置されるため、スケール2と光源1,10の距離がΔzだけ変動しても、図15の(a)に示すように、回折格子のピッチ方向と光ビームの主軸が垂直に配置されることにより、受光面上に生成される回折干渉パターンは光ビームの主軸に対して対称になるため、受光面上における回折干渉パターンのピーク位置のずれは光ビームの主軸の近傍では小さくなる。
【0195】
従って、第6の実施の形態で問題となる可能性のあったΔzの変動による回折干渉パターンのx方向での移動が光ビームの主軸の近傍では抑えられるため、スケール2のx方向変位を正確にセンシングすることができる。
【0196】
尚、主軸近傍の受光エリア分布に対応したビーム拡がり幅を有する面発光レーザを光源とすることにより、レーザ光強度を有効に利用してS/Nの高いセンシングが可能である。
【0197】
本実施の形態においては各種の変形が可能である。
【0198】
本実施の形態において、光源やスケール、光検出器の構成や配置を第2乃至第6の実施の形態のようにして、それらの各々の実施の形態に対応して前述した付加的な効果をもたせることも可能である。
【0199】
また、光源から出射される光ビームをスケール面に対して傾斜させる手法は、図15に示すように、光源の向きを傾ける以外にも、例えば、図14に示すように、光軸を曲げる光学部品(例えば、プリズムなど)を利用しても良い。
【0200】
(第9の実施の形態)
次に、本発明による光学式センサの第9の実施の形態を図16を参照して説明する。
【0201】
尚、第6の実施の形態と共通する部分については、一部省略して説明するものとする。
【0202】
光源1,10から出射した光ビームはスケール2上で回折され、スケール2に対して光源1,10と同じ側に折り返されて、スケール2に対して光源1,10と同じ側に配置された光検出器3の受光面上で回折干渉パターンを生成する。
【0203】
光検出器3では、この回折干渉パターンの所定部分を光検出器3で受光するように受光パターンが形成されている。
【0204】
この図16の例では、光検出器3は、光源1,10から出射した光ビームがスケール2上で回折され、スケール2に対して光源1,10と反対側に透過する場合を想定した光検出器33がスケール2面に対して折り返した位置に配置されており、さらに、スケール2面と受光面は平行に構成されている。
【0205】
図16中の11は光源1,10と光検出器3を集積して固定するためのブロックである。
【0206】
次に、この発明の第9の実施の形態の作用について説明する。
【0207】
光検出器3からは、図16中の出力曲線13で示すように、スケール2がx方向にp1だけ変位するごとに周期的な出力が得られる。
【0208】
ここで、スケール2と光源1,10との距離z1が図のようにΔzだけ増大した場合には、受光面上の回折干渉パターンのピッチは前述の(3)式のように僅かに変化するが、次の(4)式で示したように光検出器3がスケール2に対して光源と反対側に配置されている場合と較べて、この回折干渉パターンのピッチの変化を小さくできる利点がある。
【0209】
p2´=p1(z1+Δz+z2+Δz)/(z1+Δz)
=p1(z1+z2+2Δz)/(z1+Δz) …(4)
特に、z1=z2の条件の下では、スケール2と光源1,10の距離変動Δzが発生しても、(3)式より、受光面上における回折干渉パターンのピッチずれが起こらないので、z1=z2の条件で配置することが望ましい。
【0210】
但し、スケール2と光源1,10との距離z1が図のようにΔzだけ増大すると、受光面上における回折干渉パターンの位置ずれが発生し、センサの出力曲線13も出力曲線14のようにΔxbだけシフトしたものになってしまうという問題点を内包している。
【0211】
本実施の形態では、各種の変形が可能である。
【0212】
本実施の形態において、光源やスケール、光検出器の構成や配置を第2乃至第6の実施の形態のようにして、それらの各々の実施の形態に対応して前述した付加的な効果をもたせることも可能である。
【0213】
また、光源から出射される光ビームをスケール2面に対して傾斜させる手法は図16に示すように光源の向きを傾ける以外にも、例えば、図14に示すように、光軸を曲げる光学部品(例えば、プリズムなど)を利用しても良い。
【0214】
(第10の実施の形態)
次に、本発明の光学式センサによる第10の実施の形態を図17を参照して説明する。
【0215】
尚、第9の実施の形態と共通する部分については、一部省略して説明するものとする。
【0216】
第8の実施の形態では光源ビームの主軸とスケール2面の特定方向を垂直に配置する構成については規定していないが、本実施の形態では、スケール2に形成された回折格子のピッチ方向とコヒーレント光を放射する光源から放射される光ビームの主軸は垂直に配置されるるとともに、前記スケール2の回折格子が形成された面と前記光検出器の受光面を平行に配置する。
【0217】
従って、スケール2に形成された回折格子のピッチ方向に垂直な方向とコヒーレント光を放射する光源から放射される光ビームの主軸が角度φだけ傾斜して配置される。
【0218】
次に、この発明の第10の実施の形態の作用について説明する。
【0219】
本実施の形態では、光ビームの主軸と回折格子のピッチ方向が垂直に配置されるため、スケールと光源の距離がΔzだけ変動しても、回折干渉パターンが図17の(a)に示すように光ビームの主軸に対してxz平面では対称なため、受光エリア分布を光ビームの主軸近傍に制限することにより、受光面上における回折干渉パターンのピーク位置の移動を殆ど無視できる。
【0220】
これにより、センシング時にΔzが変動しても、x方向の移動量検出には殆ど影響しないという利点がある。
【0221】
尚、主軸近傍の受光エリア分布に対応したビーム拡がり幅を有する面発光レーザを光源とすることにより、レーザ光強度を有効に使用してS/Nの高いセンシングが可能である。
【0222】
また、本実施の形態でも、光ビームの主軸と回折格子のピッチ方向に垂直な方向は傾斜されて配置されており、また、反射型の構成であるため、第8の実施の形態と同様に、センシング時にΔzが変動しても、スケール2や光検出器3からの戻り光による光源の出力変動が小さく、さらに、受光面上における回折干渉パターンのピッチの変化が小さい等の利点も有している。
【0223】
特に、z1=z2の構成とすれば、センシング時にΔzが変動しても、回折干渉パターンのピッチとピーク位置が殆ど変化しない安定なセンシングが可能である。
【0224】
本実施の形態では、各種の変形が可能である。
【0225】
本実施の形態において、光源やスケール、光検出器の構成や配置を第2乃至第6の実施の形態のようにして、それらの各々の実施の形態に対応して前述した付加的な効果をもたせることも可能である。
【0226】
また、光源から出射される光ビームをスケール面に対して傾斜させる手法は図17に示すように、光源の向きを傾ける以外にも、例えば、図14に示すように、光軸を曲げる光学部品(例えば、プリズムなど)を利用しても良い。
【0227】
(第11の実施の形態)
次に、本発明による光学式センサの第11の実施の形態を図18を参照して説明する。
【0228】
尚、第10の実施の形態と共通する部分については、一部省略して説明するものとする。
【0229】
本実施の形態では、スケール2面とコヒーレント光を放射する光源1,10から放射される光ビームの主軸は垂直に配置されるるとともに、前記スケール2の回折格子が形成された面と前記光検出器3の受光面とが互いに平行に配置されている。
【0230】
次に、この発明の第11の実施の形態の作用について説明する。
【0231】
従来の技術で用いられた透過型の構成と較べて、本実施の形態の構成は反射型の構成であるため、第10の実施の形態と同様に、スケール2と光源1,10との間隔がずれても、回折干渉パターンのピッチずれが小さくなる利点、および、光ビームの主軸近傍では回折干渉パターンのピークの位置ずれが小さくなる利点は同様である。
【0232】
特に、主軸近傍の受光エリア分布に対応したビーム拡がり幅を有する面発光レーザを光源とすることにより、レーザ光強度を有効に使用して、S/Nの高いセンシングが可能である。
【0233】
本形態においては、φ=0としたため、z1が小さいときには、スケ一ルや受光面から光源に帰還する光による戻り光ノイズが発生することに注意する必要があるが、これが無視できるような用途においては構成がシンプルになる利点がある。
【0234】
また、zlが小さいときにもスケール2の表面・裏面や受光面に反射を低減する光学処理を施すことにより、スケール2や受光面から光源に帰還する光による戻り光ノイズが低減されるため、この戻り光ノイズが無視できるような用途には適用できる。
【0235】
特に、z1=z2の構成とすれば、センシング時にΔzが変動しても、回折干渉パターンのピッチとピーク位置が殆ど変化しない安定なセンシングが可能である。
【0236】
(第12の実施の形態)
次に、本発明による光学式センサの第12の実施の形態を図23を参照して説明する。
【0237】
尚、第1の実施の形態と共通する部分については、一部省略して説明するものとする。
【0238】
すなわち、この第12の実施の形態は、第1の実施の形態の特殊ケースとして受光エリア4が単数の場合について示したもので、それ以外については第1の実施の形態と同様である。
【0239】
そして、上述したような第1乃至第12の実施の形態で示した本発明の明細書には、特許請求の範囲に示した請求項1乃至3以外に、以下のような付記1.乃至23.として示すような発明が含まれている。
【0240】
付記1. 所定方向に移動自在であり、この移動方向と同一ピッチ方向で所定周期の回折格子が設けられたスケールと、
前記スケールの回折格子に略垂直に光ビームを照射する面発光レーザ光源と、前記スケールの回折格子を経由した前記面発光レーザ光源よりの光ビームを検出する光検出器とを具備し、前記スケールの変位を検出可能な光学式変位センサであり、
前記光検出器は、光検出面において前記回折格子のピッチ方向と同方向に並んだ複数の光強度検出手段を具備することを特徴とする光学式変位センサ。
【0241】
付記2. 前記複数の光強度検出手段の並び方は、以下の条件を満足することを特徴とする付記1記載の光学式変位センサ:
p2=npl(z1+z2)/z1
ただし、nは任章の自然数、p1は前記回折格子のピッチ間隔、z1は前記面発光レーザ光源の出射面と前記スケールの回折格子の距離、z2は前記スケールの回折格子と前記光検出器の光検出面の距離である。
【0242】
(対応する発明の実施の形態及び作用効果)
上記付記1,2の発明に関する実施の形態及び作用効果は、それぞれ第1の実施の形態及び作用効果が対応する。
【0243】
付記3. 所定の光ビーム形状を有する面発光レーザ光源と、
前記面発光レーザの光ビームを横切るように変位し、かつ、
前記光ビームによる回折干渉パターンを生成する所定周期の回折格子が形成されたスケールと、
前記回折干渉パターンの所定部分を受光する光検出器とを有する光学式変位センサにおいて、
前記面発光レーザ光源からの光ビームは出射面において、前記回折格子のピッチ方向に対して3μm以上のビーム径を有することを特徴とする光学式変位センサ。
【0244】
(対応する発明の実施の形態)
この付記3の発明に関する実施の形態は、第1の実施の形態が対応する。
【0245】
(作用効果)
この付記3の発明によると、面発光レーザの出射面上におけるビーム径を3μm以上にすれば、(従来のエンコーダで使用されてきた端面出射型の半導体レーザでは実現が難しかった)ビーム拡がり角20deg未満の拡がりの小さなビームが得られる。
【0246】
これに対応して、受光エリアの拡がりを光源の光ビーム主軸近傍に制限しても、この狭い受光エリアの拡がりに対応した光ビームの拡がり角を設定できるため、光源から出力される光ビームを有効に使って、受光エリアに回折干渉パターンを生成することができる。
【0247】
これにより、光源、スケール、受光素子の配置が最適値からずれた場合でも、良好な信号振幅と良好なS/Nの出力信号が出力可能な光学式変位センサを実現することができる。
【0248】
付記4. 所定方向に移動自在であり、この移動方向と同一ピッチ方向で所定周期の回折格子が設けられたスケールと、
前記スケールの回折格子に略垂直に光ビームを照射する面発光レーザ光源と、
前記スケールの回折格子を経由した前記面発光レーザ光源よりの光ビームを検出する光検出器とを具備し、前記スケールの変位を検出可能な光学式変位センサであり、
前記面発光レーザ光源の光ビームは出射面において、前記スケールの回折格子のピッチ方向と同方向に3μm以上のビーム径を有することを特徴とする光学式変位センサ。
【0249】
(対応する発明の実施の形態)
この付記4の発明に関する実施の形態は、第1の実施の形態が対応する。
【0250】
(作用効果)
付記3の発明と同様である。
【0251】
付記5. 前記光検出器は、光検出面において、さらに、第2の光強度検出手段を具備し、
前記複数の光強度検出手段の出力と、この第2の光強度検出手段の出力は独立して処理可能に構成されていることを特徴とする付記1または2記載の光学式変位センサ。
【0252】
(対応する発明の実施の形態及び作用効果)
この付記5の発明に関する実施の形態及び作用効果は、第2乃至第4の実施の形態が対応する。
【0253】
付記6. 前記第2の光強度検出手段は、単数または複数であり、前記スケールの回折格子のピッチ方向と同方向の長さがmp1(z1+z2)/z1に略等しいことを特徴とする付記5記載の光学式変位センサ:
ただし、mは任意の自然数、p1は前記回折格子のピッチ間隔、z1は前記面発光レーザ光源の出射面と前記スケールの回折格子の距離、z2は前記スケールの回折格子と前記光検出器の光検出面の距離である。
【0254】
(対応する発明の実施の形態及び作用効果)
この付記6の発明に関する実施の形態及び作用効果は、第2乃至第4の実施の形態が対応する。
【0255】
付記7. 前記光検出器において、光強度検出手段の並びは複数列を形成することを特徴とする付記1記載の光学式変位センサ。
【0256】
付記8. 前記光検出器において、光強度検出手段の形成する各列は同一ピッチであり、かつ、位置が所定量ずれていることを特徴とする付記7記載の光学式変位センサ。
【0257】
付記9. 前記位置のずれ量は列のピッチの1/4の奇数倍であることを特徴とする付記8記載の光学式変位センサ。
【0258】
付記10. 前記光検出器において、光強度検出手段の並びは、さらに独立して出力を取り出せる複数の光強度検出手段のグルーブに区分され、各グループの構成要素の光強度検出手段が交互に配設されていることを特徴とする付記1記載の光学式変位センサ。
【0259】
付記11. 前記交互に配設される各グルーブの構成要素の光強度検出手段は、各グループの光強度検出手段のピッチが同一であり、かつ、異なるグルーブに属する光強度検出手段の距離は前記ピッチの1/4の奇数倍であることを特徴とする付記10記載の光学式変位センサ。
【0260】
(対応する発明の実施の形態及び作用効果)
上記付記6乃至10の発明に関する実施の形態及び作用効果は、第5乃至第10の実施の形態及びそれらの作用効果が対応する。
【0261】
付記12. 所定の形状を有する光ビームを出射する面発光レーザ光源と、
前記面発光レーザ光源からの光ビームを横切るように変位し、かつ、前記光ビームによる回折干渉パターンを生成する所定周期の回折格子が形成されたスケールと、
前記回折干渉パターンの所定部分を受光する光検出器とを有する光学式変位センサにおいて、
前記面発光レーザ光源は、複数の光ビームを前記スケールに照射し、
前記光検出器は、前記複数の光ビームにより生成される各々の回折干渉パターンを選択的に受光する複数の光強度検出手段により構成されることを特徴とする光学式変位センサ。
【0262】
(対応する発明の実施の形態)
この付記12の発明に関する実施の形態は、第5の実施の形態が対応する。
【0263】
(作用効果)
この付記12の発明に関する実施の形態では、第1の実施の形態で得られる作用効果に加えて、さらに以下の作用効果が得られる。
【0264】
複数のビームをスケール上の異なる領域に照射し、これにより、複数の回折干渉パターンを受光面上の異なる領域に生成する。
【0265】
前記光検出器上に形成された複数の光強度検出手段は、各々の回折干渉パターンの特定の空間位相部分の光強度を検出する。
【0266】
これにより、1本のビームで生成される一つの回折干渉パターンの領域に複数の特定空間位相部分の光強度を検出する光強度検出手段を形成する場合と較べて、各々の光強度検出手段からの信号の分離を確実に実現することができる。
【0267】
付記13. 所定方向に移動自在であり、この移動方向と同一ピッチ方向で所定周期の回折格子が設けられたスケールと、
前記スケールの回折格子に略垂直に複数の光ビームを照射する面発光レーザ光源と、
前記スケールの回折格子を経由した前記面発光レーザ光源よりの光ビームを検出する光検出器を具備し、前記スケールの変位を検出可能な光学式変位センサであり、
前記光検出器は、前記複数の光ビームが前記回折格子に照射されることによつて受光面上に形成される各回折パターンの変位を検出可能であることを特徴とする光学式変位センサ。
【0268】
(対応する発明の実施の形態)
付記12と同様。
【0269】
(作用効果)
付記12と同様。
【0270】
付記14. 所定の形状を有する光ビームを出射する面発光レーザ光源と、
前記面発光レーザ光源からの光ビームを横切るように変位し、かつ、前記光ビームによる回折干渉パターンを生成する所定周期の回折格子が形成されたスケールと、
前記回折干渉パターンの所定部分を受光する光検出器とを有する光学式変位センサにおいて、
前記スケールは、互いに異なる所定の空間位相を有する複数の回折格子領域を有し、
前記面発光レーザ光源は、前記スケールの複数の回折格子領域に各々独立な光ビームを照射し、
前記光検出器は、前記複数の回折格子領域より生成された回折干渉パターンを各々選択的に受光する複数の光強度検出手段より構成されることを特徴とする光学式変位センサ。
【0271】
(対応する発明の実施の形態)
この付記14の発明に関する実施の形態は、第6の実施の形態が対応する。
【0272】
(作用効果)
この付記14の発明に関する実施の形態では、第1の実施の形態で得られる作用効果に加えてさらに以下の作用効果が得られる。
【0273】
複数のビームをスケール上の異なる領域に照射し、これにより、複数の回折干渉パターンを受光面上の異なる領域に生成することができるため、複数の光検出手段からの信号の分離を確実に実現することができる。
【0274】
第5の実施の形態の場合には、スケールの回折パターンは共通であるため、各々の検出手段が各々の回折干渉パターンの特定の空間位相部分の光強度を検出するためには、各々の検出手段を構成する受光エリアを所定の位置関係で配置する必要があるため、スケールのピッチが異なる場合に受光パターンをつくりなおす必要がある。
【0275】
これに対して、この付記14の発明に関する実施の形態では、スケール上の複数の回折格子パターンの位置関係だけで、各々の検出手段が検出する回折干渉パターンの位相差を設定できるため、スケールピッチが変わっても、各々の検出手段を構成する受光エリアの配置を変える必要がない利点がある。
【0276】
付記15. 所定方向に移動自在であり、この移動方向と同一ピッチ方向で所定周期の回折格子が複数設けられたスケールと、
前記スケールの各々の回折格子に対して略垂直に独立した光ビームを照射する面発光レーザ光源と、
前記スケールの回折格子を経由した前記面発光レーザ光源よりの光ビームを検出する光検出器を具備し、前記スケールの変位を検出可能な光学式変位センサであり、
前記光検出器は、前記複数の光ビームが前記各々の回折格子に照射されることによつて受光面上に形成される各回折パターンの変位を検出可能であることを特徴とする光学式変位センサ。
【0277】
(対応する発明の実施の形態)
付記14と同様。
【0278】
(作用効果)
付記14と同様。
【0279】
付記16. 所定方向に移動自在であり、この移動方向と同一ピッチ方向で所定周期の回折格子が設けられたスケールと、
前記スケールの回折格子に光ビームを照射するコヒーレント光源と、
前記スケールの回折格子により回折された前記コヒーレント光源よりの光ビームの特定部分を選択的に検出する光検出器を具備し、前記スケールの変位を検出可能な光学式変位センサであり、
前記コヒーレント光源よりの光ビームの主軸は、前記回折格子面の垂線に対して所定の方向に傾斜していることを特徴とする光学式変位センサ。
【0280】
(対応する発明の実施の形態)
この付記16の発明に関する実施の形態は、第7乃至第10の実施の形態が対応する。
【0281】
(作用効果)
この付記16の発明に関する実施の形態では、コヒーレント(レーザ)光源から出射される光ビームの主軸に対して、スケール面や光検出器の受光面が傾斜して配置されている。
【0282】
このため、レーザ光源から出射した光がスケールや光検出器の表面で反射される光が、レーザに帰還する現象を回避して、レーザ光の戻り光雑音がセンサの出力信号に重畳されることを抑制することができる。
【0283】
これにより、この付記16の発明に関する実施の形態では、より高精度で信頼性の高いスケールの変位センシングが可能となる。
【0284】
付記17. 前記スケールに形成された回折格子のピッチ方向と前記コヒーレント光を放射する光源から放射される光ビームの主軸は垂直に配置されるとともに、
前記スケールの回折格子が形成された面と前記光検出器の受光面を平行に配置することを特徴とする付記16記載の光学式変位センサ。
【0285】
(対応する発明の実施の形態)
この付記17の発明に関する実施の形態は、第8及び第10の実施の形態が対応する。
【0286】
(作用効果)
この付記17の発明に関する実施の形態では、回折格子のピッチ方向と前記光検出器の受光面を平行に配置することにより、受光面上における回折干渉パターンの空間周期が一定となるため、光検出器上の受光エリアのパターン設計や配置が簡単になる。
【0287】
しかるに、前記スケールに形成された回折格子のピッチ方向と光源から出射する光ビームの傾き方向を特定しない構成では、一般的には、スケールと光源の間隔が変化すると受光面上の回折干渉パターンが干渉パターンのピッチ方向に移動するため、スケールがスケール上の回折格子のピッチ方向に変位することによる受光面上の回折干渉パタ一ンの移動との分離が難しくなる。
【0288】
一方、この付記17の発明に関する実施の形態のように、光ビームの主軸と回折格子のピッチ方向を垂直に配置すれば、受光面上の回折干渉パターンが光ビームの主軸に対して対称に生成されるため、光ビームの主軸上においては、スケールと光源の問隔が変化しても受光面上の回折干渉パターンはピッチ方向に移動しない。
【0289】
特に、光ビームの主軸近傍にだけ複数の受光エリアを形成すれば、これら光ビームの主軸近傍の受光エリアからのセンサ出力は、スケールと光源の距離の変化にほとんど影響されないため、回折格子のピッチ方向のスケール変位を正確に検出することができる。
【0290】
このため、主軸近傍の受光エリア分布に対応したビーム拡がり幅を有する面発光レーザを光源とすることが望ましい。
【0291】
付記18. 前記回折格子のピッチ方向と、前記コヒーレント光源よりの光ビームの主軸は垂直であり、前記回折格子面と前記光検出器の受光面は平行であることを特徴とする付記15記載の光学式変位センサ。
【0292】
(対応する発明の実施の形態)
付記17と同様。
【0293】
(作用効果)
付記17と同様。
【0294】
付記19. コヒーレント光を放射する光源と、
前記光源から放射されるコヒーレント光としての光ビームを横切るように変位し、かつ、前記光ビームによる回折干渉パターンを生成する所定周期の回折格子が形成されたスケールと、
前記回折干渉パターンの所定部分を受光する光検出器とを有する光学式変位センサにおいて、
前記スケールに対して前記光源と前記光ビームが照射される面の垂線に対して、前記光源のから出射される光ビームの主軸を所定方向に傾斜させ、
さらに、前記スケールに対して前記光源と前記光検出器を同じ側に配置することを特徴とする光学式変位センサ。
【0295】
(対応する発明の実施の形態)
この付記19の発明に関する実施の形態は、第9及び第10の実施の形態が対応する。
【0296】
前記スケールに対して前記光源と前記光検出器を同じ側に配置した構成とするものを、以下、反射型の構成と記述することにする。
【0297】
(作用効果)
この付記19の発明に関する実施の形態の構成では、光源と光検出器を小型に一体化して形成できるため、スケールを光源と光検出器で挟む構造(以下、これを透過型の構成と記述することにする)と較べてセンサヘッドを小型化することができる。
【0298】
さらに、反射型の構成の場合は、スケールと光源の間隔が変動すると、z1はz1+Δzに、z2はz2+Δzとなる。
【0299】
一方、透過型の構成の場合は、光源と光検出器の配置が固定されている通常の場合に、zlはz1+Δzに、z2はz2−Δzとなる。
【0300】
ここで、スケール面と受光面を平行に配置する場合を考える。
【0301】
今、Δzの配置ずれが発生したときに、受光面上に形成される干渉パターンのピッチがp2からp2´に変化するとすれば、反射型の構成の場合は前記(4)式が、透過型の構成の場合は前記(3)式が成り立つ。
【0302】
従って、前述の傾斜角度が小さいときには、同じΔzに対して、反射型の方がp2とp2´差が小さくなる。
【0303】
すなわち、スケールと光源の間隔がずれても、反射型の構成では、回折干渉パターンのピッチずれが小さくなる利点がある。
【0304】
特に、前記(1)式を満たす条件の下に、z1=z2の構成とすれば、反射型の場合は
p2´=p2=2p1 …(5)
となり、Δzに対してp2が影響されないという利点がある。
【0305】
付記20. 前記スケールに形成された回折格子のピッチ方向と前記コヒーレント光を放射する光源から放射される光ビームの主軸は垂直に配置されるとともに、
前記スケールの回折格子が形成された面と前記検出器の受光面を平行に配置することを特徴とする付記19記載の光学式変位センサ。
【0306】
(対応する発明の実施の形態)
この付記20の発明に関する実施の形態は、第10の実施の形態が対応している。
【0307】
(作用効果)
この付記20の発明に関する実施の形態では、回折格子のピッチ方向と前記光検出器の受光面を平行に配置することにより、受光面上における回折干渉パターンの空間周期が一定となるため、光検出器上の受光エリアのパターン設計や配置が簡単になる。
【0308】
しかるに、前記スケールに形成された回折格子のピッチ方向と光源から出射する光ビームの傾き方向を特定しない横成では、一般的には、スケールと光源の間隔が変化すると受光面上の回折干渉パターンが干渉パターンのピッチ方向に移動するため、スケールがスケール上の回折格子のピッチ方向に変位することによる受光面上の回折干渉パターンが移動する現象との分離が難しくなる。
【0309】
一方、この付記20の発明で規定するように、回折格子のピッチ方向と前記コヒーレント光を放射する光源から放射される光ビームの主軸を垂直に配置すれば、第8の実施の形態と同様な理由により、光軸の近傍ではスケールと光源の間隔が変化しても受光面上の回折干渉パターンのピッチ方向での移動が起こらないため、回折格子のピッチ方向のスケール変位を正確に検出することができる。
【0310】
このため、主軸近傍の受光エリア分布に対応したビーム拡がり幅を有する面発光レーザを光源とすることが望ましい。
【0311】
尚、付記19の発明と同様に、スケールと光源との間隔がずれたとしても、反射型の構成であるため、回折干渉パターンのピッチ変化が小さくなるという利点がある。
【0312】
付記21. コヒーレント光を放射する光源と、
前記光源から放射されるコヒーレント光としての光ビームを横切るように変位し、かつ、前記光ビームによる回折干渉パターンを生成する所定周期の回折格子が形成されたスケールと、
前記回折干渉パターンの所定部分を受光する光検出器とを有する光学式変位センサにおいて、
前記スケールに対して前記光源と前記光検出器とが同じ側に配置されるとともに、
前記スケールの回折格子が形成された平面と前記コヒーレント光を放射する光源から放射される光ビ一ムの主軸とが垂直に配置されることを特徴とする光学式変位センサ。
【0313】
(対応する発明の実施の形態)
この付記21の発明は、付記20の発明においてφ=0とした構成であり、この付記21の発明に関する実施の形態は、第11の実施の形態が対応する。
【0314】
(作用効果)
この付記21の発明に関する実施の形態では、反射型の構成であるため、付記20の発明と同様に、従来の技術で用いられた透過型の構成と較べて、スケールと光源の間隔がずれても、回折干渉パターンのピッチずれが小さくなるという利点及び回折干渉パターンのピークの位置ずれが小さくなるという利点がある。
【0315】
また、この付記21の発明に関する実施の形態では、φ=0としているため、z1が小さいときには、スケールや受光面から光源に帰還する光による戻り光ノイズが発生することに注意する必要があるが、これが無視できるような用途においては構成がシンプルになるという利点がある。
【0316】
また、z1が小さいときにもスケールの表面・裏面や受光面に反射を低減する光学処理を施すことにより、スケールや受光面から光源に帰還する光による戻り光ノイズが低減されるため、この戻り光ノイズが無視できるような用途には適用できる。
【0317】
付記22. 所定方向に移動自在であり、この移動方向と同一ピッチ方向で所定周期の回折格子が設けられたスケールと、
前記スケールの回折格子に略垂直に光ビームを照射する面発光レーザ光源と、
前記スケールの回折格子を経由した前記面発光レーザ光源よりの光ビームを検出する光検出器を具備することを特徴とするスケールの変位を検出可能な光学式変位センサ。
【0318】
(対応する発明の実施の形態)
この付記22の発明に関する実施の形態としては、第12の実施の形態が対応する。
【0319】
(作用効果)
この付記22の発明に関する実施の形態では、面発光レーザ光源を使用することにより、レーザ光の広がりを小さくすることができ、光源、スケール、受光素子の配置が最適配置からずれた場合でも、S/Nの良好な出力信号を得ることができる。
【0320】
付記23. 所定の形状を有する光ビームを出射する面発光レーザ光源と、
前記面発光レーザ光源からの光ビームを横切るように変位し、且つ、前記光ビームにより回折干渉パターンを生成する所定周期の回折格子が形成されれたスケールと、
前記回折干渉パターンの所定部分を受光する光検出器を具備することを特徴とする光学式変位センサ。
【0321】
(対応する発明の実施の形態)
この付記23の発明に関する実施の形態としては、第12の実施の形態が対応する。
【0322】
(作用効果)
この付記23の発明に関する実施の形態では、面発光レーザ光源を使用することにより、レーザ光の広がりを小さくすることができ、光源、スケール、受光素子の配置が最適配置からずれた場合でも、S/Nの良好な出力信号を得ることができる。
【0323】
【発明の効果】
従って、以上説明したように、本発明によれば、特に、光ビームの拡がり角を従来の半導体レーザ光源では実現不可能な所定の小さな角度以下に設定することができる構成とすることにより、光源、スケール、受光素子の配置が最適配置からずれた場合でも、S/Nの良好な出力信号が得られる光学式変位センサを提供することができる。
【0324】
また、以上説明したように、本発明によれば、特に、レーザ光が光源に帰還する現象を回避して、レーザ光の戻り光雑音がセンサの出力信号に重畳されるのを抑制することが可能な光学式変位センサを提供することができる。
【0325】
また、以上説明したように、本発明によれば、特に、光源、スケール、受光素子の配置が設計値からずれた場合でも、受光面上の回折干渉パターン周期やパターン位置の変化を低減し、ひいては、スケール変位に対する信号振幅の低下や周期の変化を抑制することが可能な光学式変位センサをを提供することができる。
【図面の簡単な説明】
【図1】図1は、本発明による光学式変位センサの第1の実施の形態の概略的構成を示すもので、図1の(a)は第1の実施の形態を示す斜視図であり、図1の(b)は図1の(a)に対応するxz面内の断面図、図1の(c)は図1の(a)に対応するyz面内の断面図である。
【図2】図2は、図1の面発光レーザの一例を示すもので、図2の(a)はその概略断面図、図2の(b)は図2の(a)中の−z方向から見た上面図である。
【図3】図3は、面発光レーザの出射面上におけるビーム径とビーム拡がり角θの関係を実際に試作して評価した実験結果を示す図である。
【図4】図4は、図1の面発光レーザの別の例を示す概略断面図である。
【図5】図5は、図1のスケールや受光面からの戻り光ノイズを低減するために、それぞれ光学処理によってスケール2や光検出器3の受光面に反射を抑制する反射防止膜36(a)や光散乱効果を持たせる処置部37(b)を形成する例を示す図である。
【図6】図6の(a)は第2の実施の形態による光学式センサを示す斜視図であり、図6の(b)は図6の(a)の光検出器3の受光面をスケール2の側から見たときの平面図である。
【図7】図7は、第3の実施の形態による光学式センサを示すもので、図6の(b)と同様に、図6の(a)における光検出器3の受光面をスケール2の側から見たときの平面図である。
【図8】図8は、図7における2群の受光エリアを、P2/4の奇数倍だけずらせた別々の受光エリア群を交互に形成する構成を例示する図である。
【図9】図9は、第4の実施の形態による光学式センサを示すもので、図6の(b)と同様に、図6の(a)における光検出器3の受光面をスケール2の側から見たときの平面図である。
【図10】図10は第5の実施の形態による光学式センサを示す斜視図である。
【図11】図11は第6の実施の形態による光学式センサを示す斜視図である。
【図12】図12は第7の実施の形態による光学式センサの概略的構成を示すもので、図12の(a)は第7の実施の形態による光学式センサのxz面内の断面図であり、図12の(b)は図12の(a)に対応するyz面内の断面図である。
【図13】図13の(a)および(b)は、第7の実施の形態において、所定の条件下で傾斜角φがφ=0の場合およびφ=10degの場合について受光面上の回折干渉パターン試算した結果を各々比較して示す図である。
【図14】図14は、光源から出射される光ビームをスケール面に対して傾斜させる手法の変形例として光軸を曲げる光学部品(例えば、プリズムなど)を利用する場合を示す図である。
【図15】図15は第8の実施の形態による光学式センサの概略的構成を示すもので、図15の(a)は第8の実施の形態による光学式センサのxz面内の断面図であり、図15の(b)は図15の(a)に対応するyz面内の断面図である。
【図16】図16は第9の実施の形態による光学式センサの概略的構成を示すもので、図16の(a)は第9の実施の形態による光学式センサのxz面内の断面図であり、図16の(b)は図16の(a)に対応するyz面内の断面図である。
【図17】図17は第10の実施の形態による光学式センサの概略的構成を示すもので、図17の(a)は第10の実施の形態による光学式センサのxz面内の断面図であり、図17の(b)は図17の(a)に対応するyz面内の断面図である。
【図18】図18は第11の実施の形態による光学式センサの概略的構成を示すもので、図18の(a)は第11の実施の形態による光学式センサのxz面内の断面図であり、図18の(b)は図18の(a)に対応するyz面内の断面図である。
【図19】図19は、第1の従来技術として、レンズなどの光学部品の組立を必要としない小型・低コストなエンコーダの一例としてコヒーレント光源と回折格子スケールを用いたレーザエンコーダを示す構成図である。
【図20】図20は、図19のレーザエンコーダを用いた変位センサをさらに詳しく説明するための動作説明図である。
【図21】図21は、第2の従来技術として、面発光レーザ用いた小型変位センサに関する従来技術を説明する構成図である。
【図22】図22は、図21の面発光レーザ用いた小型変位センサにおいて、距離Lが変化したときのセンサの出力特性が構成上の多くのパラメータに依存することを説明する典型的な場合の試算例として、光源に従来から一般的に使われてきた半導体レーザである端面出射型の半導体レーザを用いた場合(a)と、面発光レーザを用いた場合(b)とを対比して示すとともに、外部ミラーを0.5deg.だけ傾けた場合の特性(c)を示す図である。
【図23】図23は、本発明による光学式変位センサの第12の実施の形態の概略的構成を示すもので、図23の(a)は第12の実施の形態を示す斜視図であり、図23の(b)は図1の(a)に対応するxz面内の断面図、図1の(c)は図1の(a)に対応するyz面内の断面図である。
【符号の説明】
2…スケール、
3…光検出器、
4…受光エリア、
5…光ビームの主軸、
6…ビーム境界曲線、
10…面発光レーザ、
15…スケール2の回折格子が形成された面における光ビームの広がり領域、
16…光検出器3の受光面における光ビームの広がり領域、
31、31´…電気配線、
32、33、34、35、36…出力パッド、
41…N型コンタクト電極、
42…N−GaAs基板、
43…n−AlGaAs/GaAs半導体多層ミラ−、
44…n−AlGaAsスペーサ層、
45…InGaAs量子井戸活性層、
46…p−AlGaAsスペーサ層、
47…p−AlGaAs/GaAs半導体多層ミラ−、
48…GaAs電流ブロック層、
49…P型コンタクト電極。
Claims (7)
- 所定の形状を有する光ビームを出射する面発光レーザ光源と、前記面発光レーザ光源からの光ビームを横切るように変位し、かつ、前記光ビームによる回折干渉パターンを生成する所定周期の回折格子が形成されたスケールと、前記回折干渉パターンの所定部分を受光する光検出器とを有する光学式変位センサであって、前記面発光レーザ光源の光ビーム出射面と前記回折格子が形成された面との間隔をz1とし、前記回折格子が形成された面と前記光検出器の受光面との間隔をz2とし、前記スケール上の回折格子のピッチをp1とし、nを自然数としたとき、前記光検出器は、受光面上における前記回折干渉パターンのピッチ方向に
np1(z1+z2)/z1
の間隔で形成された複数の受光エリアにより構成される光強度検出手段を有し、
前記面発光レーザ光源の射出窓は、
前記回折干渉パターンのピッチ方向または該ピッチ方向と垂直な方向に対して、射出面上での射出光ビーム径が3μm以上となるように構成されており、且つ、
前記複数の受光エリアは、
前記回折干渉パターンのピッチ方向または該ピッチ方向と垂直な方向に対して、前記光ビームの拡がり幅の内側に配置されている
ことを特徴とする光学式変位センサ。 - 前記面発光レーザ光源は、
前記光ビームの主軸が前記光ビームが照射される前記スケールの面の垂線に対して所定方向に傾斜するように、配置されていることを特徴とする請求項1記載の光学式変位センサ。 - 前記スケール上に形成された回折格子の周期方向と、前記面発光レーザ光源から出射される光ビームの主軸と、は略垂直を為すことを特徴とする請求項2記載の光学式変位センサ。
- 前記スケールの前記回折格子が形成された面と、前記光検出器の受光面と、は互いに平行であり、且つ、
前記面発光レーザ光源と光検出器とは、前記スケールに対して同じ側に配置されていることを特徴とする請求項1記載の光学式変位センサ。 - 前記光検出器は、前記複数の受光エリアより成る光強度検出手段を複数有し、
前記複数の光強度検出手段を構成する受光エリアは、互いに前記回折格子の周期方向に対して所定間隔ずらされて交互に配置されていることを特徴とする請求項1記載の光学式変位センサ。 - 前記光検出器の受光面上における前記回折干渉パターンの空間周期をp2とすると、
前記受光エリアの所定間隔のずらし量は、空間周期p2の1/4の奇数倍であることを特徴とする請求項5記載の光学式変位センサ。 - 前記面発光レーザ光源は、複数の光ビームを、それぞれ前記スケール上の複数の回折格子に照射し、
前記光検出器は、前記複数の光ビームと、前記複数の回折格子により生成される各々の回折パターンと、を独立に受光する複数の光強度検出手段を備えることを特徴とする請求項1記載の光学式変位センサ。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP00641199A JP4372877B2 (ja) | 1999-01-13 | 1999-01-13 | 光学式変位センサ |
| US09/480,506 US7064842B1 (en) | 1999-01-13 | 2000-01-10 | Optical displacement sensor and optical encoder |
| DE10000955A DE10000955A1 (de) | 1999-01-13 | 2000-01-12 | Optischer Verschiebungssensor und optischer Encoder |
| US11/075,439 US7102759B2 (en) | 1999-01-13 | 2005-03-08 | Optical displacement sensor and optical encoder |
| US11/075,443 US7102760B2 (en) | 1999-01-13 | 2005-03-08 | Optical displacement sensor and optical encoder |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP00641199A JP4372877B2 (ja) | 1999-01-13 | 1999-01-13 | 光学式変位センサ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2000205819A JP2000205819A (ja) | 2000-07-28 |
| JP2000205819A5 JP2000205819A5 (ja) | 2006-02-16 |
| JP4372877B2 true JP4372877B2 (ja) | 2009-11-25 |
Family
ID=11637636
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP00641199A Expired - Fee Related JP4372877B2 (ja) | 1999-01-13 | 1999-01-13 | 光学式変位センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4372877B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104344786A (zh) * | 2013-08-09 | 2015-02-11 | 株式会社其恩斯 | 接触式位移计 |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4576013B2 (ja) * | 1999-12-21 | 2010-11-04 | オリンパス株式会社 | 光学式エンコーダ |
| JP2000337816A (ja) | 1999-06-01 | 2000-12-08 | Olympus Optical Co Ltd | 光学式変位センサ |
| US6713756B2 (en) | 2000-05-09 | 2004-03-30 | Olympus Corporation | Optical encoder and optical rotary encoder |
| JP4812189B2 (ja) * | 2001-06-15 | 2011-11-09 | オリンパス株式会社 | 光学式検出装置 |
| JP3720751B2 (ja) | 2001-10-23 | 2005-11-30 | オリンパス株式会社 | 光学式エンコーダ |
| JP4595697B2 (ja) * | 2005-06-20 | 2010-12-08 | 株式会社安川電機 | 反射型光ギャップセンサ |
| JP5984364B2 (ja) * | 2011-11-22 | 2016-09-06 | キヤノン株式会社 | 光学式エンコーダおよびこれを備えた装置 |
| JP6003372B2 (ja) * | 2012-08-07 | 2016-10-05 | 富士通株式会社 | 光学式ロータリーエンコーダ及びその補正方法 |
| JP6000759B2 (ja) * | 2012-08-31 | 2016-10-05 | キヤノン株式会社 | スケール、エンコーダ、レンズ装置、および、撮像システム |
| DE102015216268A1 (de) * | 2015-08-26 | 2017-03-02 | Dr. Johannes Heidenhain Gmbh | Optische Positionsmesseinrichtung |
| JP2017198652A (ja) * | 2016-04-25 | 2017-11-02 | セイコーエプソン株式会社 | エンコーダーおよびロボット |
| JP7063743B2 (ja) * | 2018-06-19 | 2022-05-09 | 株式会社ミツトヨ | エンコーダ |
| CN110470222B (zh) * | 2019-08-30 | 2021-08-24 | 佛山市顺德区美的饮水机制造有限公司 | 用于测量物体的物理尺寸的装置和饮水设备 |
| CN113566714B (zh) * | 2021-07-29 | 2022-09-20 | 同济大学 | 一种自溯源型光栅干涉精密位移测量系统 |
| CN113638852A (zh) * | 2021-08-25 | 2021-11-12 | 中国华能集团清洁能源技术研究院有限公司 | 一种风机塔筒倾斜监测装置及方法 |
| CN117804348B (zh) * | 2024-03-01 | 2024-04-30 | 中国科学技术大学 | 一种基于纵向莫尔条纹相关计算的光栅位移传感器 |
-
1999
- 1999-01-13 JP JP00641199A patent/JP4372877B2/ja not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104344786A (zh) * | 2013-08-09 | 2015-02-11 | 株式会社其恩斯 | 接触式位移计 |
| CN104344786B (zh) * | 2013-08-09 | 2018-07-06 | 株式会社其恩斯 | 接触式位移计 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000205819A (ja) | 2000-07-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4372877B2 (ja) | 光学式変位センサ | |
| US7102760B2 (en) | Optical displacement sensor and optical encoder | |
| US6713756B2 (en) | Optical encoder and optical rotary encoder | |
| US8311067B2 (en) | System and devices for improving external cavity diode lasers using wavelength and mode sensors and compact optical paths | |
| US7193204B2 (en) | Multi-track optical encoder employing beam divider | |
| US9417366B2 (en) | Hybrid diffractive optical element and spectral beam combination grating | |
| US8710425B2 (en) | Encoder that optically detects positional information of a moving body from different optical paths lengths | |
| JP4399179B2 (ja) | 光学式変位検出装置および方法 | |
| JP3544573B2 (ja) | 光学式エンコーダ | |
| US11085799B2 (en) | Position detection apparatus that detects a position of an object by detecting light from a scale, and lithography apparatus, force sensor, and apparatus having force sensor including the position detection apparatus | |
| WO2019190670A1 (en) | Diffractive optic for hybrid coherent and spectral beam combination | |
| US20180066966A1 (en) | Displacement measuring device and method of measuring displacement | |
| US6631005B1 (en) | Optical displacement sensor having a semiconductor laser light source using an optical element which can control beam angle and a beam shape | |
| JPH07202256A (ja) | 光集積型センサ | |
| JP3560692B2 (ja) | 光学式エンコーダ | |
| JP4576013B2 (ja) | 光学式エンコーダ | |
| JP2001317963A (ja) | 光学式エンコーダ | |
| JP5103416B2 (ja) | 波長掃引光源 | |
| JPH10190148A (ja) | 面発光光源およびこれを用いた光学式センサー | |
| JP2003315101A (ja) | 光学式エンコーダ | |
| KR102120134B1 (ko) | 공진기 및 이를 이용한 광센서 | |
| JP2022098156A (ja) | 光学式エンコーダ | |
| JP5399194B2 (ja) | レーザ装置 | |
| JP2002188942A (ja) | 光学式エンコーダ | |
| JP2003004490A (ja) | 光学式エンコーダ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051222 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051222 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090401 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090519 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090717 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090811 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090903 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120911 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120911 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130911 Year of fee payment: 4 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |